
A Performance-Driven MPC Algorithm for Underactuated Bridge Cranes †


Abstract
:1. Introduction
2. Classic MPC and Bayesian Optimization for a Bridge Crane
2.1. Classic MPC for Bridge Crane
2.2. Bayesian Optimization for a Bridge Crane
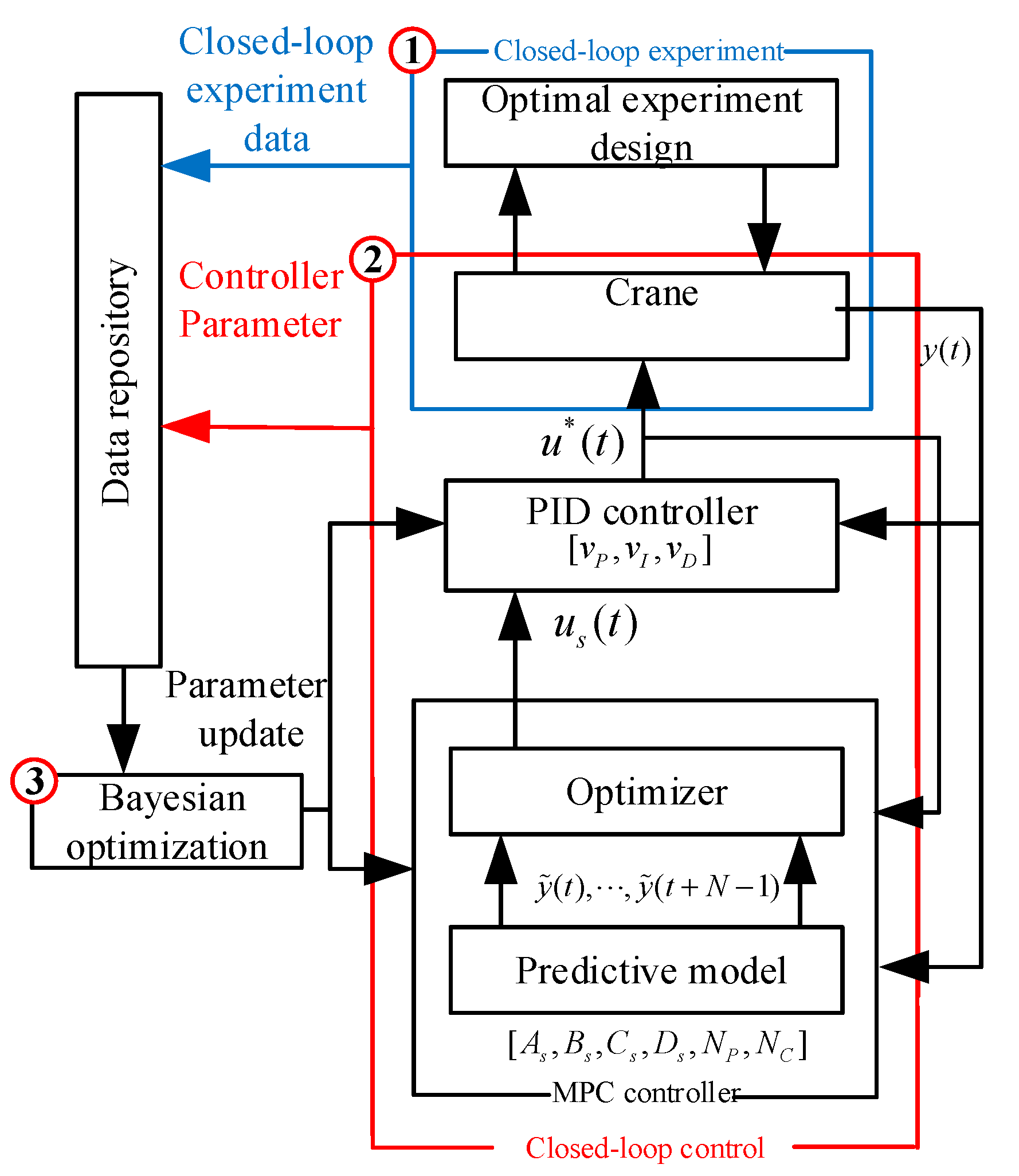
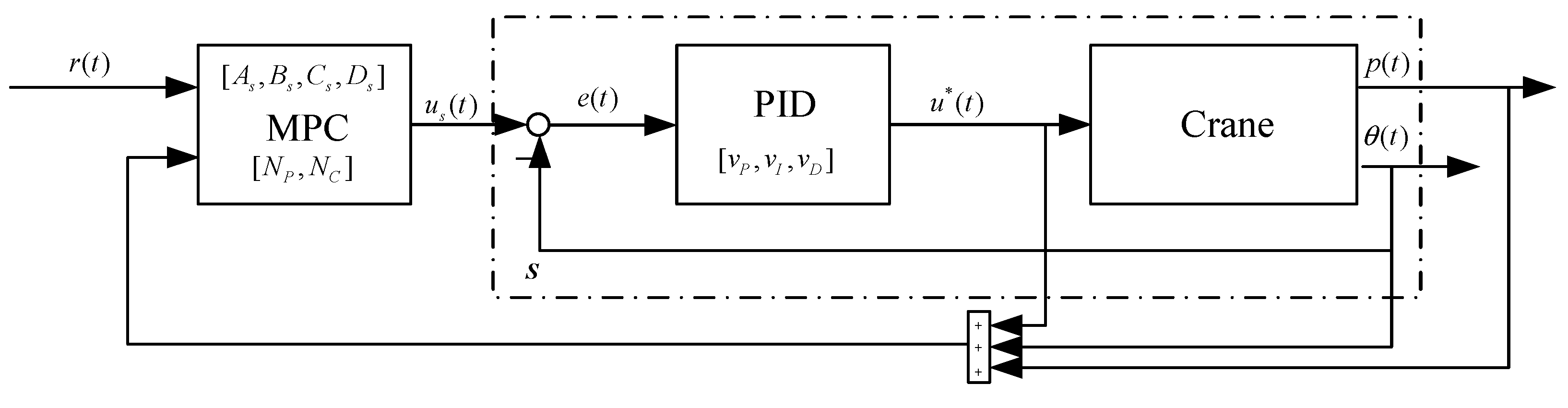
3. Control Architecture
3.1. Inner PID Controller Parameterization
3.2. Outer MPC Controller Parameterization
4. P-MPC Parameter Tuning
4.1. Closed-Loop Performance Index
4.2. P-MPC Controller Parameter Tuning
| Algorithm 1 P-MPC Controller Parameter Tuning |
| Input: data-set with controller parameters, input, and output 1. Initialize data-set with parameters and performance as 2. For i = m, …, Nmax − 1 do 2.1 Train a GP approximating according to data set D 2.2 Design the AC function according to GP 2.3 Calculate the next controller parameters: 2.4 Perform an experiment and calculate the performance index 2.5 Augment the data set D: 2.6 Exit for loop if the termination criterion is met: 3. Calculate the best parameters and Output: optimal controller parameters and |
4.2.1. Learning a GP Model
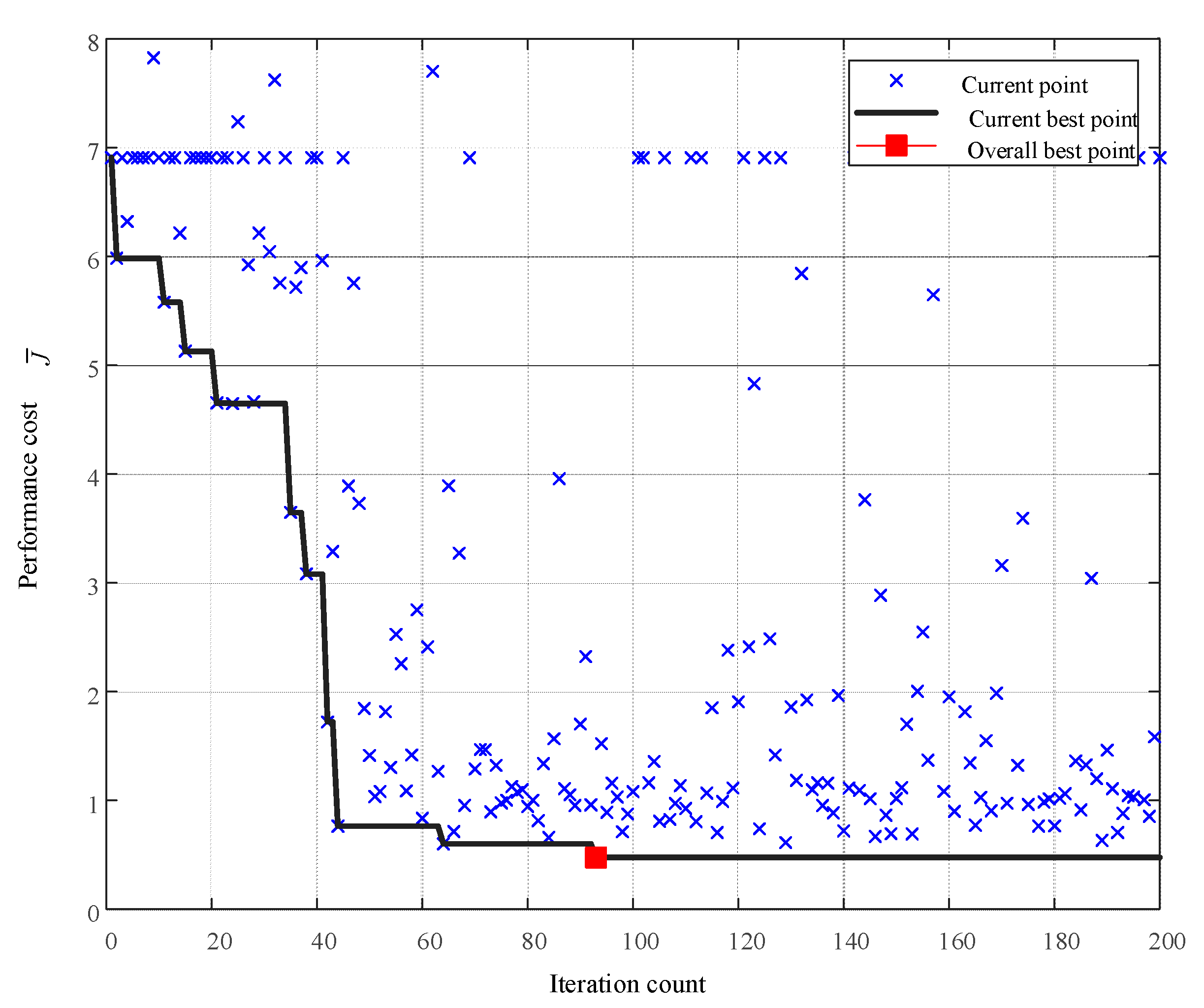
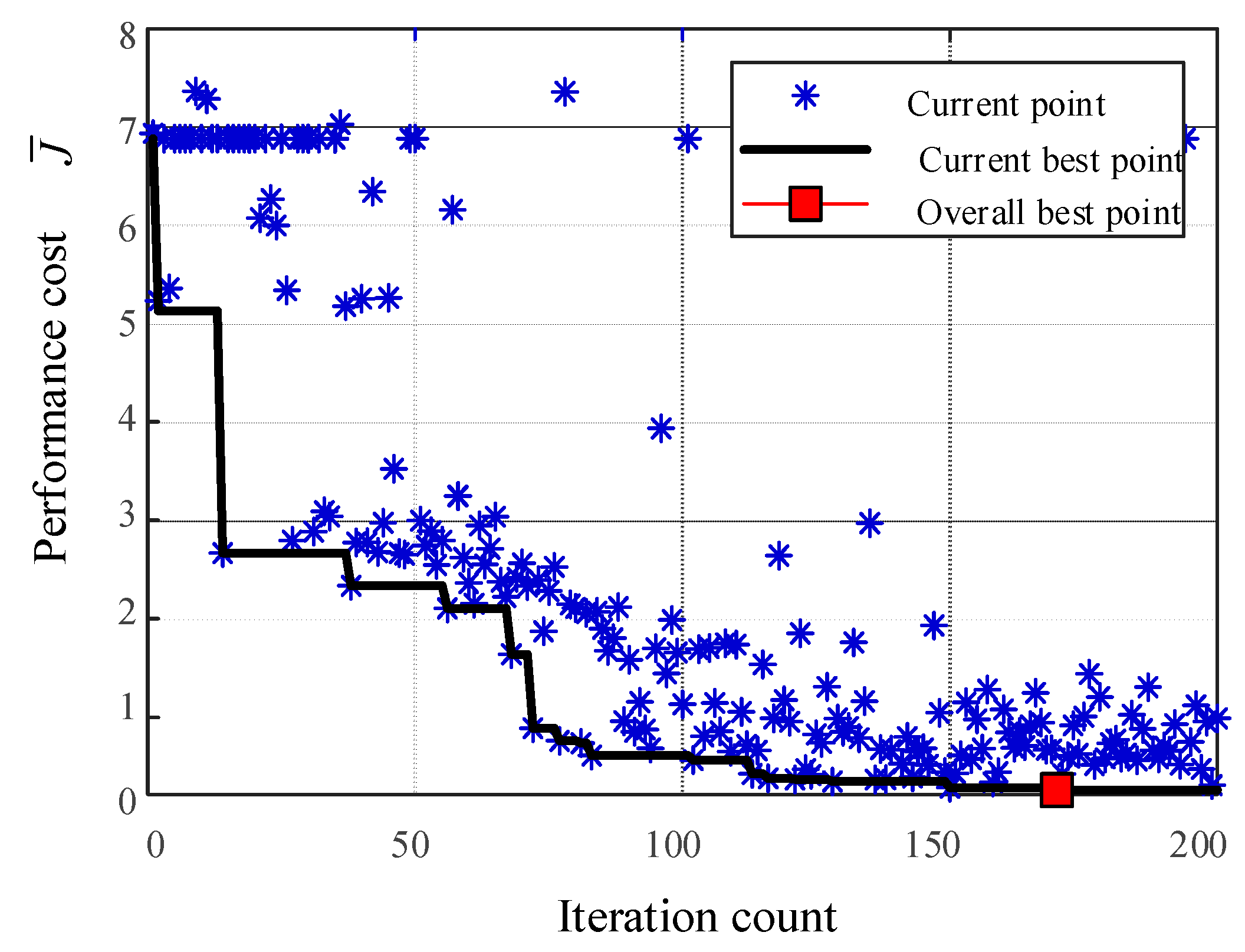
4.2.2. Parameter Tuning by Bayesian Optimization
5. Simulation and Experiment Results
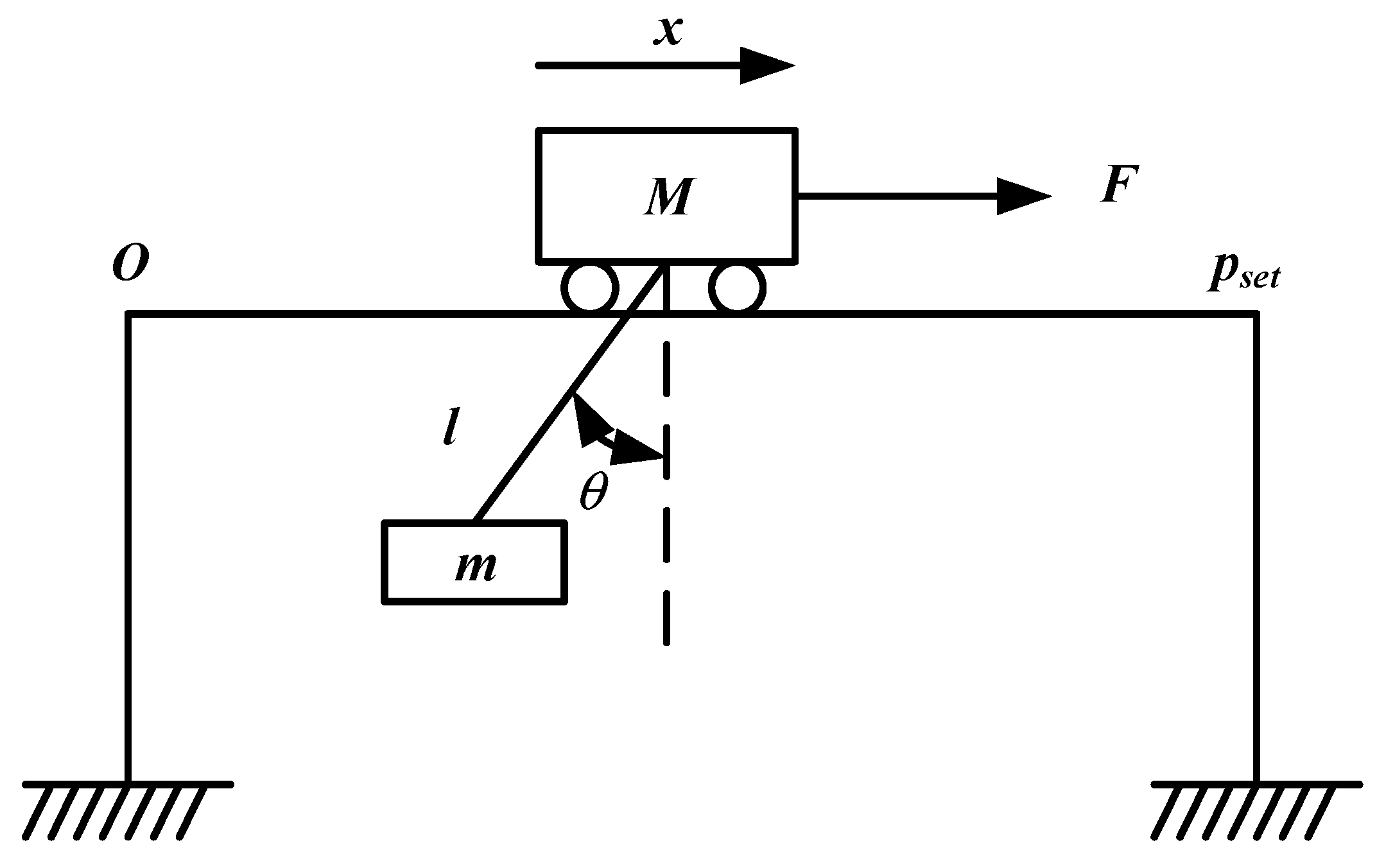
5.1. Bridge Crane Dynamics
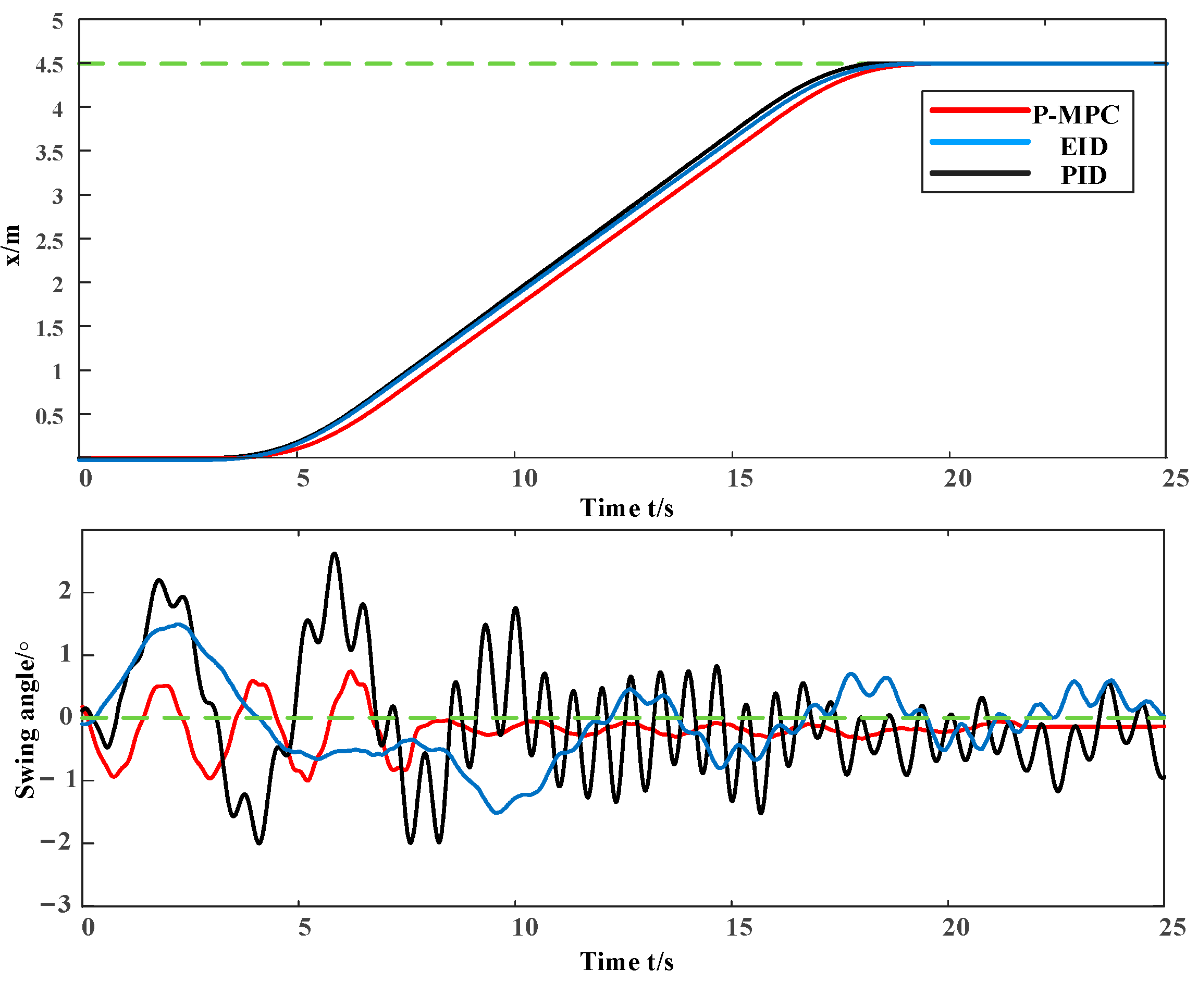
5.2. Simulation Results
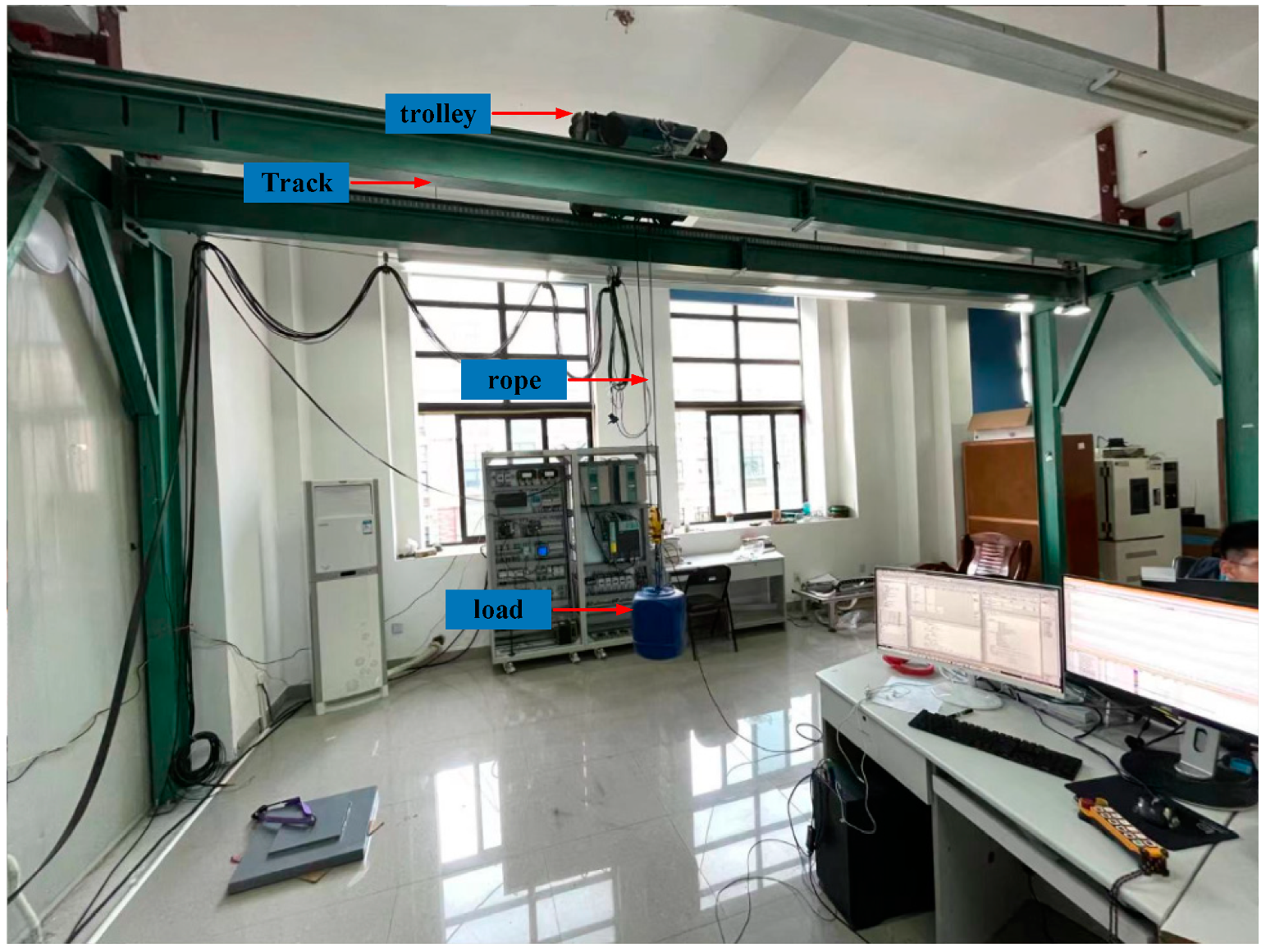
5.3. Experiment Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vaughan, J.; Kim, D.; Singhose, W. Control of Tower Cranes With Double-Pendulum Payload Dynamics. IEEE Trans. Control Syst. Technol. 2010, 18, 1345–1358. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H.; Ning, S.; Yongchun, F.; He, C. Adaptive control of underactuated crane systems subject to bridge length limitation and parametric uncertainties. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 3568–3573. [Google Scholar] [CrossRef]
- Ye, H. Stabilization of Uncertain Feedforward Nonlinear Systems With Application to Underactuated Systems. IEEE Trans. Autom. Control 2018, 64, 3484–3491. [Google Scholar] [CrossRef]
- Wang, J.-J.; Kumbasar, T. Optimal PID control of spatial inverted pendulum with big bang–big crunch optimization. IEEE/CAA J. Autom. Sin. 2018, 7, 822–832. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Chen, H.; Fang, Y. Swing suppression and accurate positioning control for underactuated offshore crane systems suffering from disturbances. IEEE/CAA J. Autom. Sin. 2020, 7, 892–900. [Google Scholar] [CrossRef]
- Ouyang, H.; Wang, J.; Zhang, G.; Mei, L.; Deng, X. Novel Adaptive Hierarchical Sliding Mode Control for Trajectory Tracking and Load Sway Rejection in Double-Pendulum Overhead Cranes. IEEE Access 2019, 7, 10353–10361. [Google Scholar] [CrossRef]
- Li, F.; Zhang, C.; Sun, B. A Minimum-Time Motion Online Planning Method for Underactuated Overhead Crane Systems. IEEE Access 2019, 7, 54586–54594. [Google Scholar] [CrossRef]
- He, W.; Ge, S.S. Cooperative control of a nonuniform gantry crane with constrained tension. Automatica 2016, 66, 146–154. [Google Scholar] [CrossRef]
- Jaafar, H.I.; Mohamed, Z.; Ramli, L.; Abdullahi, A. Vibration Control of a Nonlinear Double-Pendulum Overhead Crane Using Feedforward Command Shaping. In Proceedings of the 2018 IEEE Conference on Systems, Process and Control, Melaka, Malaysia, 14–15 December 2018; pp. 118–122. [Google Scholar] [CrossRef]
- Tysse, G.O.; Cibicik, A.; Egeland, O. Vision-based control of a knuckle boom crane with online cable length estimation. IEEE/ASME Trans. Mechatron. 2020. [Google Scholar] [CrossRef]
- Shi, M.; Guo, S.; Jiang, L.; Huang, Z. Active-Passive Combined Control System in Crane Type for Heave Compensation. IEEE Access 2019, 7, 159960–159970. [Google Scholar] [CrossRef]
- Tolochko, O.; Bazhutin, D. Anti-Sway Full Order State-Feedback Control of the Overhead Crane with Variable Rope Length Using Luenberger Observer. In Proceedings of the 2018 X International Conference on Electrical Power Drive Systems, Novocherkassk, Russia, 3–6 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, Y.; Cheng, X. Finite-Time Trajectory Tracking Control for Overhead Crane Systems Subject to Unknown Disturbances. IEEE Access 2019, 7, 55974–55982. [Google Scholar] [CrossRef]
- Wu, X.; He, X. Nonlinear Energy-Based Regulation Control of Three-Dimensional Overhead Cranes. IEEE Trans. Autom. Sci. Eng. 2016, 14, 1297–1308. [Google Scholar] [CrossRef]
- Doktian, J.; Pongyart, W.; Vanichchanunt, P. Passivity-Based Approach for Overhead Crane Anti-Sway Controller Design. In Proceedings of the 2019 Research, Invention, and Innovation Congress (RI2C), Bankok, Thailand, 11–13 December 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Wu, X.; He, X. Enhanced damping-based anti-swing control method for underactuated overhead cranes. IET Control Theory Appl. 2015, 9, 1893–1900. [Google Scholar] [CrossRef]
- Sun, Z.; Bi, Y.; Zhao, X.; Sun, Z.; Ying, C.; Tan, S. Type-2 Fuzzy Sliding Mode Anti-Swing Controller Design and Optimization for Overhead Crane. IEEE Access 2018, 6, 51931–51938. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, X.; Song, R.; Rong, X.; Tian, G.; Tian, X.; Li, Y. Adaptive Proportional-Derivative Sliding Mode Control Law With Improved Transient Performance for Underactuated Overhead Crane Systems. IEEE/CAA J. Autom. Sin. 2018, 5, 683–690. [Google Scholar] [CrossRef]
- He, W.; Zhang, S.; Ge, S.S. Adaptive Control of a Flexible Crane System With the Boundary Output Constraint. IEEE Trans. Ind. Electron. 2013, 61, 4126–4133. [Google Scholar] [CrossRef]
- Chwa, D. Sliding-Mode-Control-Based Robust Finite-Time Antisway Tracking Control of 3-D Overhead Cranes. IEEE Trans. Ind. Electron. 2017, 64, 6775–6784. [Google Scholar] [CrossRef]
- Ouyang, H.; Hu, J.; Zhang, G.; Mei, L.; Deng, X. Sliding-Mode-Based Trajectory Tracking and Load Sway Suppression Control for Double-Pendulum Overhead Cranes. IEEE Access 2018, 7, 4371–4379. [Google Scholar] [CrossRef]
- Lu, B.; Fang, Y.; Sun, N. Continuous Sliding Mode Control Strategy for a Class of Nonlinear Underactuated Systems. IEEE Trans. Autom. Control 2018, 63, 3471–3478. [Google Scholar] [CrossRef]
- Gu, X.; Xu, W.; Zhang, M.; Zhang, W.; Wang, Y.; Chen, T. Adaptive Controller Design for Overhead Cranes With Moving Sliding Surface. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019. [Google Scholar] [CrossRef]
- Kim, G.-H.; Hong, K.-S. Adaptive Sliding-Mode Control of an Offshore Container Crane With Unknown Disturbances. IEEE/ASME Trans. Mechatron. 2019, 24, 2850–2861. [Google Scholar] [CrossRef]
- Jin, G.; Deng, M. Operator-based robust nonlinear free vibration control of a flexible plate with unknown input nonline-arity. IEEE/CAA J. Autom. Sin. 2020, 7, 442–450. [Google Scholar] [CrossRef]
- Leite, D.; Aguiar, C.; Pereira, D.A.; Souza, G.; Skrjanc, I. Nonlinear Fuzzy State-Space Modeling and LMI Fuzzy Control of Overhead Cranes. In Proceedings of the IEEE International Conference on Fuzzy Systems, New Orleans, LA, USA, 18–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, Z.; Ling, Y.; Sun, Z.; Bi, Y.; Tan, S.; Ding, L. Designing and Application of Fuzzy PID Control for Overhead Crane Systems. In Proceedings of the 2019 2nd International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 28–30 September 2019; pp. 411–414. [Google Scholar]
- Das, S.; Dhalmahapatra, K.; Maroo, P.; Maiti, J. A self-tuning neuromorphic controller to minimize swing angle for overhead cranes. In Proceedings of the 2018 4th International Conference on Recent Advances in Information Technology (RAIT), Dhanbad, India, 15–17 March 2018; pp. 1–6. [Google Scholar]
- Wang, D.; He, H.; Liu, D. Intelligent Optimal Control With Critic Learning for a Nonlinear Overhead Crane System. IEEE Trans. Ind. Inform. 2017, 14, 2932–2940. [Google Scholar] [CrossRef]
- Chen, H.; Fang, Y.; Sun, N. A Swing Constraint Guaranteed MPC Algorithm for Underactuated Overhead Cranes. IEEE/ASME Trans. Mechatron. 2016, 21, 2543–2555. [Google Scholar] [CrossRef]
- He, X.; He, W.; Shi, J.; Sun, C. Boundary Vibration Control of Variable Length Crane Systems in Two-Dimensional Space With Output Constraints. IEEE/ASME Trans. Mechatron. 2017, 22, 1952–1962. [Google Scholar] [CrossRef]
- Giacomelli, M.; Faroni, M.; Gorni, D.; Marini, A.; Simoni, L.; Visioli, A. MPC-PID control of operator-in-the-loop overhead cranes: A practical approach. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), Valencia, Spain, 24–26 October 2018; pp. 321–326. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Niu, D.; Li, Q.; Chen, Y.; Wei, S.; Liu, J. Anti-shake positioning algorithm of bridge crane based on phase plane analysis. J. Eng. 2019, 2019, 8370–8373. [Google Scholar] [CrossRef]
- Giacomelli, M.; Colombo, D.; Faroni, M.; Schmidt, O.; Simoni, L.; Visioli, A. Comparison of Linear and Nonlinear MPC on Operator-In-the-Loop Overhead Cranes. In Proceedings of the 7th International Conference on Control, Mechatronics and Automation (ICCMA), Delft, The Netherlands, 6–8 November 2019; pp. 221–225. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Bao, H. An Anti-Swing Closed-Loop Control Strategy for Overhead Cranes. Appl. Sci. 2018, 8, 1463. [Google Scholar] [CrossRef] [Green Version]
- Bansal, S.; Calandra, R.; Xiao, T.; Levine, S.; Tomlin, C.J. Goal-driven dynamics learning via Bayesian optimization. In Proceedings of the IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; pp. 5168–5173. [Google Scholar] [CrossRef] [Green Version]
- Bao, H.; An, J.; Zhou, M.; Kang, Q. A Data-driven MPC Algorithm for Bridge Cranes. In Proceedings of the 2020 International Conference on Advanced Mechatronic Systems (ICAMechS), Hanoi, Vietnam, 10–13 December 2020; pp. 328–332. [Google Scholar]
- Yue, M.; Hou, X.; Fan, M.; Jia, R. Coordinated trajectory tracking control for an underactuated tractor-trailer vehicle via MPC and SMC approaches. In Proceedings of the 2017 2nd International Conference on Advanced Robotics and Mechatronics (ICARM), Hefei and Tai’an, China, 27–31 August 2017; pp. 82–87. [Google Scholar] [CrossRef]
- Shi, X.D.; Kang, Q.; Zhou, M.C.; Abusorrah, A.; An, J. Soft Sensing of Nonlinear and Multimode Processes based on Semi-supervised Weighted Gaussian Regression. IEEE Sens. J. 2020, 20. [Google Scholar] [CrossRef]
- Shi, X.; Kang, Q.; Zhou, M.; An, J.; Abusorrah, A. Novel L1 Regularized Extreme Learning Machine for Soft-sensing of an Industrial Process. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]
- Carr, S.; Garnett, R.; Lo, C. BASC: Applying Bayesian optimization to the search for global minima on potential energy surfaces. In Proceedings of the International Conference on Machine Learning (ICML), New York, NY, USA, 18–24 June 2016; pp. 898–907. [Google Scholar]
- Wang, X.; Kang, Q.; Zhou, M.; Pan, L.; Abusorrah, A. Multiscale Drift Detection Test to Enable Fast Learning in Nonsta-tionary Environments. IEEE Trans. Cybern. 2021, 51, 3483–3495. [Google Scholar] [CrossRef] [PubMed]
- Kang, Q.; Song, X.; Zhou, M.; Li, L. A Collaborative Resource Allocation Strategy for Decomposition-based Multi-objective Evolutionary Algorithms. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2416–2423. [Google Scholar] [CrossRef]
- Sun, N.; Yang, T.; Fang, Y.; Wu, Y.; Chen, H. Transportation Control of Double-Pendulum Cranes with a Nonlinear Qua-si-PID Scheme: Design and Experiments. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1408–1418. [Google Scholar] [CrossRef]
- Dian, S.; Chen, L.; Hoang, S.; Pu, M.; Liu, J. Dynamic balance control based on an adaptive gain-scheduled backstepping scheme for power-line inspection robots. IEEE/CAA J. Autom. Sin. 2017, 6, 198–208. [Google Scholar] [CrossRef]
- Deng, K.; Sun, Y.; Li, S.; Lu, Y.; Brouwer, J.; Mehta, P.G.; Zhou, M.; Chakraborty, A. Model Predictive Control of Central Chiller Plant With Thermal Energy Storage Via Dynamic Programming and Mixed-Integer Linear Programming. IEEE Trans. Autom. Sci. Eng. 2014, 12, 565–579. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Zhou, M.; Luo, X. Modified Primal-Dual Neural Networks for Motion Control of Redundant Manip-ulators with Dynamic Rejection of Harmonic Noises. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 4791–4801. [Google Scholar] [CrossRef] [PubMed]
- Cao, Z.; Xiao, Q.; Huang, R.; Zhou, M. Robust Neuro-Optimal Control of Underactuated Snake Robots With Experience Replay. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 208–217. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
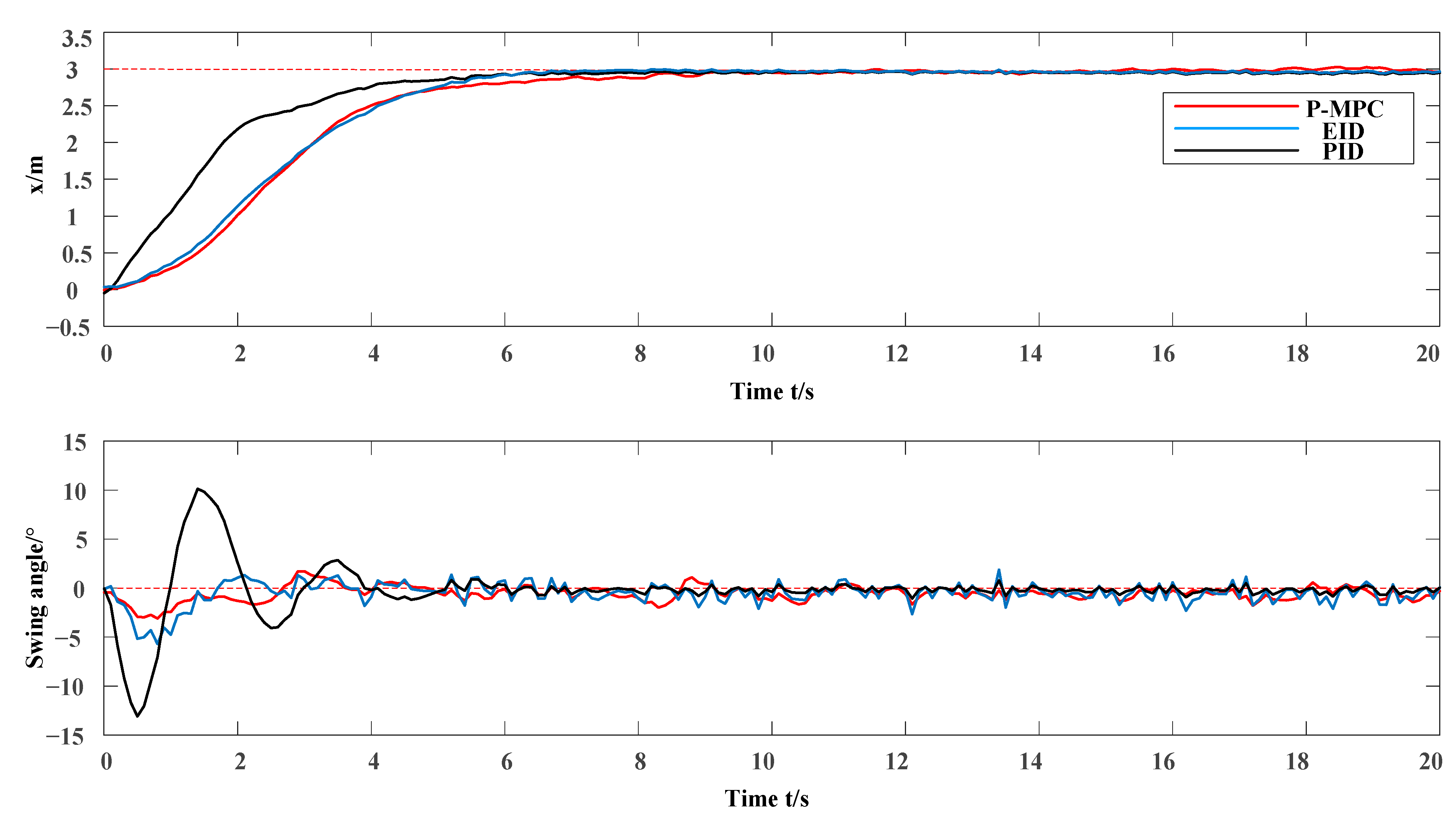
| Approaches | Maximum Swing Angle | Transporting Time | Closed-Loop Performance |
|---|---|---|---|
| P-MPC | 3.5° | 8 s | 0.021 |
| EID | 7° | 8 s | 0.366 |
| PID | 12° | 8 s | 0.491 |
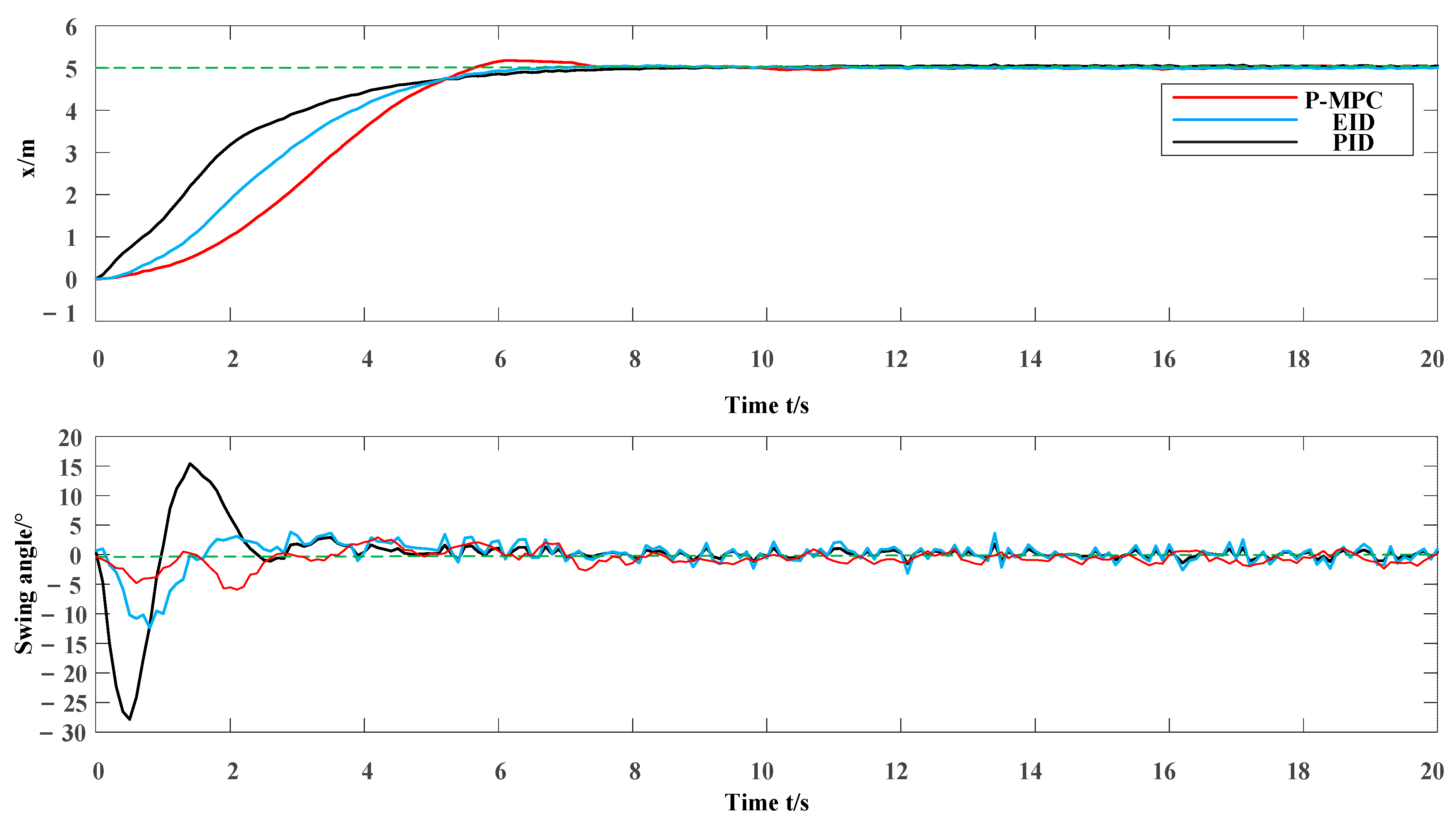
| Approaches | Maximum Swing Angle | Transporting Time | Closed-Loop Performance |
|---|---|---|---|
| P-MPC | 7° | 8 s | 0.477 |
| EID | 12° | 8 s | 0.743 |
| PID | 27° | 8 s | 0.796 |
| Approaches | Maximum Swing Angle | Transporting Time | Closed-Loop Performance |
|---|---|---|---|
| P-MPC | 1.0° | 20 s | 0.003 |
| EID | 1.5° | 20 s | 0.015 |
| PID | 2.5° | 20 s | 0.042 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, H.; Kang, Q.; An, J.; Ma, X.; Zhou, M. A Performance-Driven MPC Algorithm for Underactuated Bridge Cranes. Machines 2021, 9, 177. https://doi.org/10.3390/machines9080177
Bao H, Kang Q, An J, Ma X, Zhou M. A Performance-Driven MPC Algorithm for Underactuated Bridge Cranes. Machines. 2021; 9(8):177. https://doi.org/10.3390/machines9080177
Chicago/Turabian StyleBao, Hanqiu, Qi Kang, Jing An, Xianghua Ma, and Mengchu Zhou. 2021. "A Performance-Driven MPC Algorithm for Underactuated Bridge Cranes" Machines 9, no. 8: 177. https://doi.org/10.3390/machines9080177