1. Introduction
As unstable targets in space continue to increase and become more threatening, maneuvering tasks, such as on-orbit removal, have become more and more urgent [
1,
2,
3,
4]. Space instable targets are objects to be manipulated in orbit, such as satellites and space debris, in space operation missions. The movement of SIT is complicated, and their manipulation task is also difficult [
5]. In order to verify the feasibility of the space control method and optimize the control algorithm, it is necessary to conduct ground manipulation simulation experiments of SIT [
6,
7]. The primary task of the ground simulation test is to accurately simulate the relative spatial movement and relative attitude motion between SIT and space operation aircraft.
A serial robot with multi-DOF, widely used in areas such as grinding, polishing, and parts processing, has the advantages of a large range of pose motion and high repeat positioning accuracy. It is an effective method to achieve the given motion of SIT in ground test platform through using six-DOF industrial robot [
8,
9]. During simulating given space movement in the ground test, it is necessary to optimize the robot path on the premise that the simulation accuracy meets the requirements, and at the same time ensure the dynamic characteristics of the simulator. With the increasingly tense global energy situation, the optimization and control of robot energy consumption has gradually become an important goal in industrial systems [
10].
Many motion planning methods and trajectory optimization algorithms have been proposed and studied to achieve smooth movement, obstacle avoidance, and flexible contact collisions in different application scenarios [
11,
12,
13,
14,
15]. Interpolation, curve fitting the trajectory of the robot joint angular displacement or the cartesian pose of the robot end target position, generally including polynomial curve, Bézier spline, and NURBS curve, is adopted to smooth the path in robot motion planning to reduce acceleration shock and movement jitter [
16,
17]. In high-precision machining of parts, Pavel [
18] adopts the analytic geometry method on the basis of the symmetries in the Euclidean plane and achieves a trajectory error of less than 5% in experiments, which proves the feasibility of generating complex processing motion for robot. Modelled predictive control approach, based on vision system and linear interpolation, is applied for the task of ball-catching to generate robot real-time trajectory [
19]. Aiming at the multi-path optimization issue, R.A. [
20] uses genetic algorithms to search for the shortest path without collision, which connects preset points in the robot’s task space. Chaos enhanced accelerated particle swarm optimization (CAPSO) is developed by Taghavifar [
21] to plan the optimal path of a wheeled robot, and ensures the shortest path from the starting point to the target position by avoiding collision with static and dynamic obstacles. The improved algorithm combining Dijkstra algorithm or A* algorithm with other algorithms can effectively perform the shortest path search, which has the advantages of a small calculation and fast convergence speed, and is used in varieties of scenarios of robot operations [
22,
23,
24,
25,
26].
In terms of optimal motion planning combined with minimal energy consumption and robot operation tasks, many implementation methods have emerged. One DoF mechatronic system is studied by Giovanni to reduce the energy consumption and the minimum energy consumption conditions have been found in a closed form taking into account the chance of recovering the braking energy [
27]. A robot configuration selection method based on the lowest power consumption is studied by Abdullah and verified through a straight-line scenario and a square-path scenario, which achieve the goal of optimizing the calculated joint configuration [
28]. Luo uses Chebyshev interpolation points and direct iteration method to plan the trajectory of industry robotic manipulators for energy minimization, and the method is applied to the three-link plane mechanism, which obtained optimal joint angles under the premise that the start and end points of the movement are known [
29]. A task-related analysis is used by Scalera to enhance the energy efficiency of a 4-DOF parallel robot [
14]. Carabin adopts the trajectory planning mean, which is on the basis of electromagnetic field model and the derivation of the energy formulation, to realize the minimum-energy consumption of the Cartesian robot [
30]. Bitar proposed a method of obtaining energy-optimized trajectory planning while managing obstacle constraints for ASVs [
31]. The enhanced bacterial foraging optimization algorithm is researched by Abbas and applied to path planning in two-dimensional motion space [
32]. An artificial bee colony algorithm and a genetic algorithm is studied to optimize the working path length and welding time of the welding robot, which minimizes the total amount of robot joint movement [
33,
34]. Sathiya [
35] takes the execution time and execution tasks of mobile robots as the optimization goals, and proposes the application of evolutionary algorithms to achieve multi-objective optimization in trajectory planning. Under the conditions of kinematics and dynamics constraints, Amruta [
36] presents the EMOTLBO approach to get the best joint motion that defines the weld path, which effectively enhances the efficiency of the robot in operation tasks. Wang [
37] applies the improved whale optimization algorithm to obtain the constant velocity motion of the robot end effector, which improves the processing efficiency and quality of the grinding task. Under the working conditions of the power generation mode and the energy exchange, Christian [
38] proposes an energy-based robot model based on B-spline functions and realizes the optimization of energy between different joints. Aiming at the robot PTP motion planning without collision, Francisco [
39] uses a third-order polynomial method to fit the joint space motion, which obtains an approximate optimal time trajectory and considers the constraint of energy consumed.
Inspired by the above-mentioned research works and considering the particularity of ground simulation of space instability targets, there are still several issues that need to be studied and solved. Firstly, it is hard to completely avoid robot singularity configuration due to the large coverage of the motion range in ground simulation experiment of SIT [
40,
41], which makes the motion optimization with singular position particularly important. Secondly, although the intelligent optimization algorithm based on the global search is sufficiently robust to acquire the optimized path, the optimization result is more likely to converge prematurely in the process of processing multi-objective optimization [
42], which will cause the problem of difficulty in motion reproduction and simulation validity when the robot exists with different error sources. Furthermore, there may be multiple optimal motion paths or cases where the sub-optimal path is better than the optimal path on certain evaluation functions and the path search algorithm needs to be improved accordingly. Finally, the spin motion of SIT on orbit is not restricted, that is, it can be rotated infinitely, in contrast to the limited simulation of rotational motion subjected to robot structure. How to achieve the simulation of spin motion as much as possible with minimal energy consumption through the combined motion and motion optimization of the robot joints is also an issue of motion planning of the SIT movement simulation robot, especially when singularity causes multi-axis coupling.
Focusing on the characteristics of ground motion simulation of SIT and the mentioned challenges above, the study proposes an optimization method of simulator motion path including a singularity configuration based on energy saving. Ground motion planning of SIT is performed through motion mapping and path optimization of motion simulation robots. The local optimal solution is avoided through path search algorithm on the basis of constructing a complete directional motion path of energy consumption. The versatility of ground motion simulation of SIT is achieved using the presented approach and it enhances the authenticity of the ground experiment and reduces the energy consumption of the ground system.
The rest of the paper is organized as follows: ground motion planning method of SIT and motion optimization model of SITMSR are described in
Section 2 and
Section 3, respectively; solution to the optimal joint trajectory of SITMSR and results obtained by a series of simulations are presented in
Section 4 and
Section 5, respectively; and conclusions are drawn in
Section 6.
4. Solution to the Optimal Joint Trajectory of SITMSR
4.1. The General Form of Joint Motion Trajectories
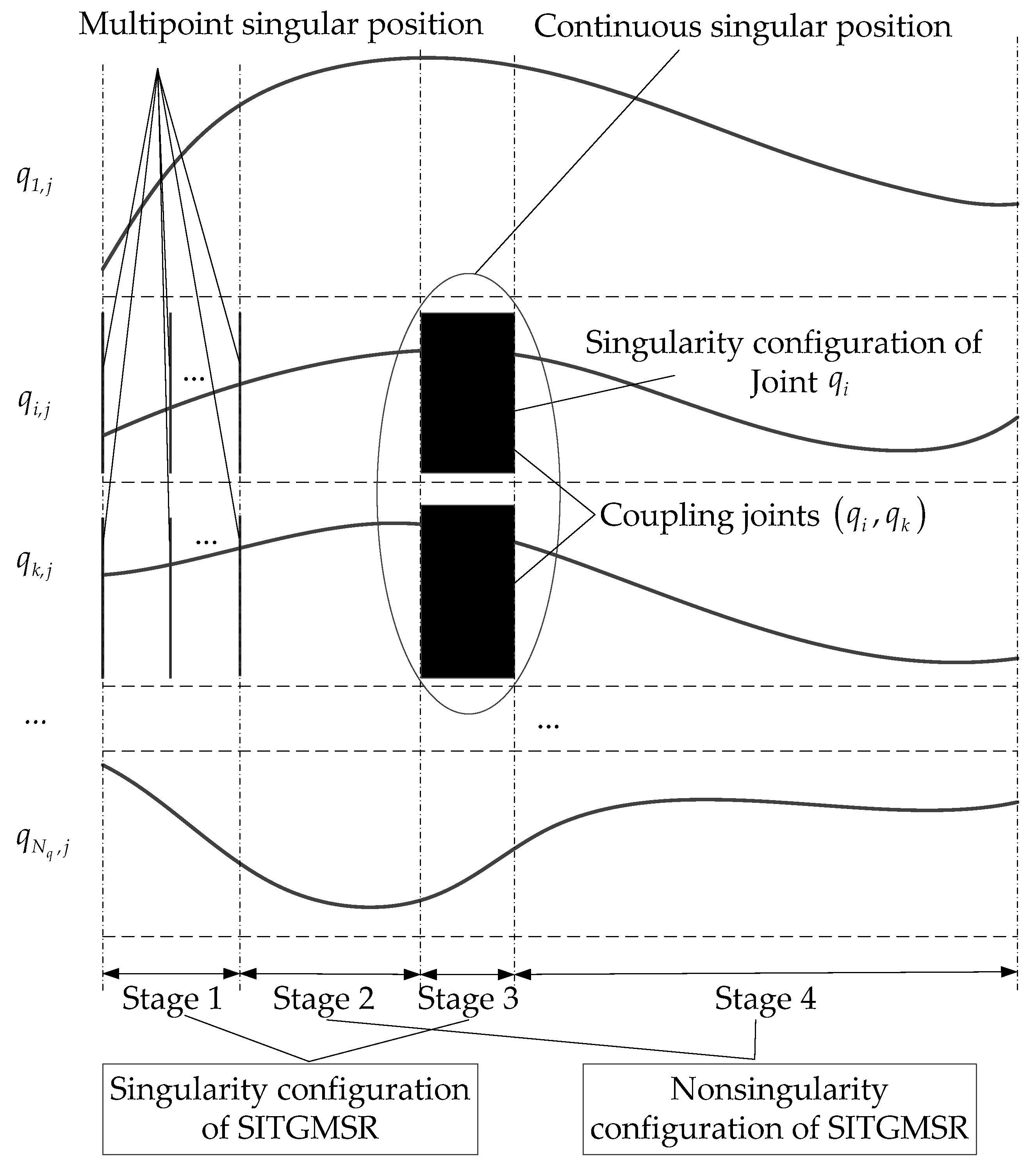
For the planned motion of SITS is complex and diverse, it leads to the generality of the motion of SITMSR. As a result, the compound situations of singularity configuration and non-singularity configuration of SITMSR should be considered. The singularity can be judged by the full rank of Jacobian matrix, which can also be quickly determined by using three singular factors extracted from the joint expressions of the Jacobian matrix. Another method is to judge whether there is a problem of DOF degradation. The general forms of the SITMSR joint motion trajectories are seen in
Figure 5.
To facilitate the solution of the optimal trajectory, the joint movement above can be segmented into paths with non-singularity configuration (Stages 2 and 4 in
Figure 5) and paths with singularity configuration. Paths with singularity configuration are divided into trajectory with multipoint singular position (Stage 1 in
Figure 5) and trajectory with continuous singular position (Stage 3 in
Figure 5). Although joint
qi and
qk have constraints, respectively, even under the premise of coupled angular displacement constraints, there are infinite sets of solutions for their joint angular displacements. If the robot continues to run in this condition, then the robot is in the continuous singularity configuration as shown in Stage 3. We solved each segment of the optimal path separately, and, finally, merged the optimal solutions of the multiple segments to obtain the optimal trajectory of SITMSR under the general path form of SIT in the ground experiment.
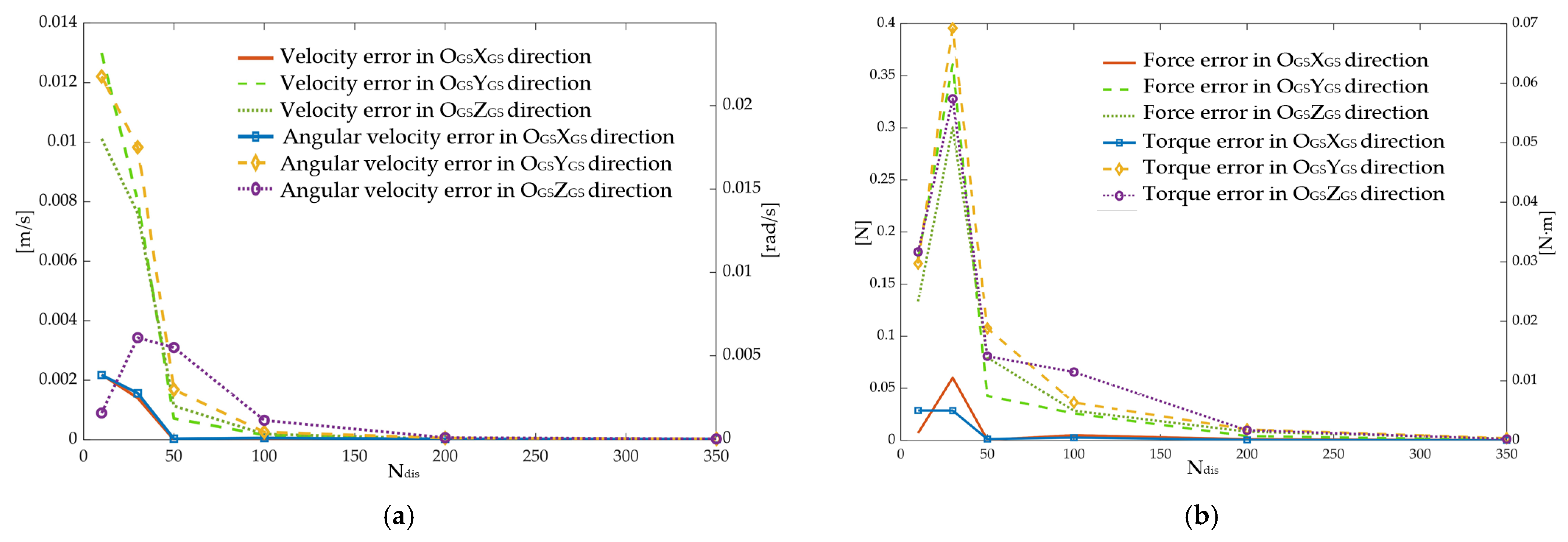
4.2. Optimal Selection of Ndis
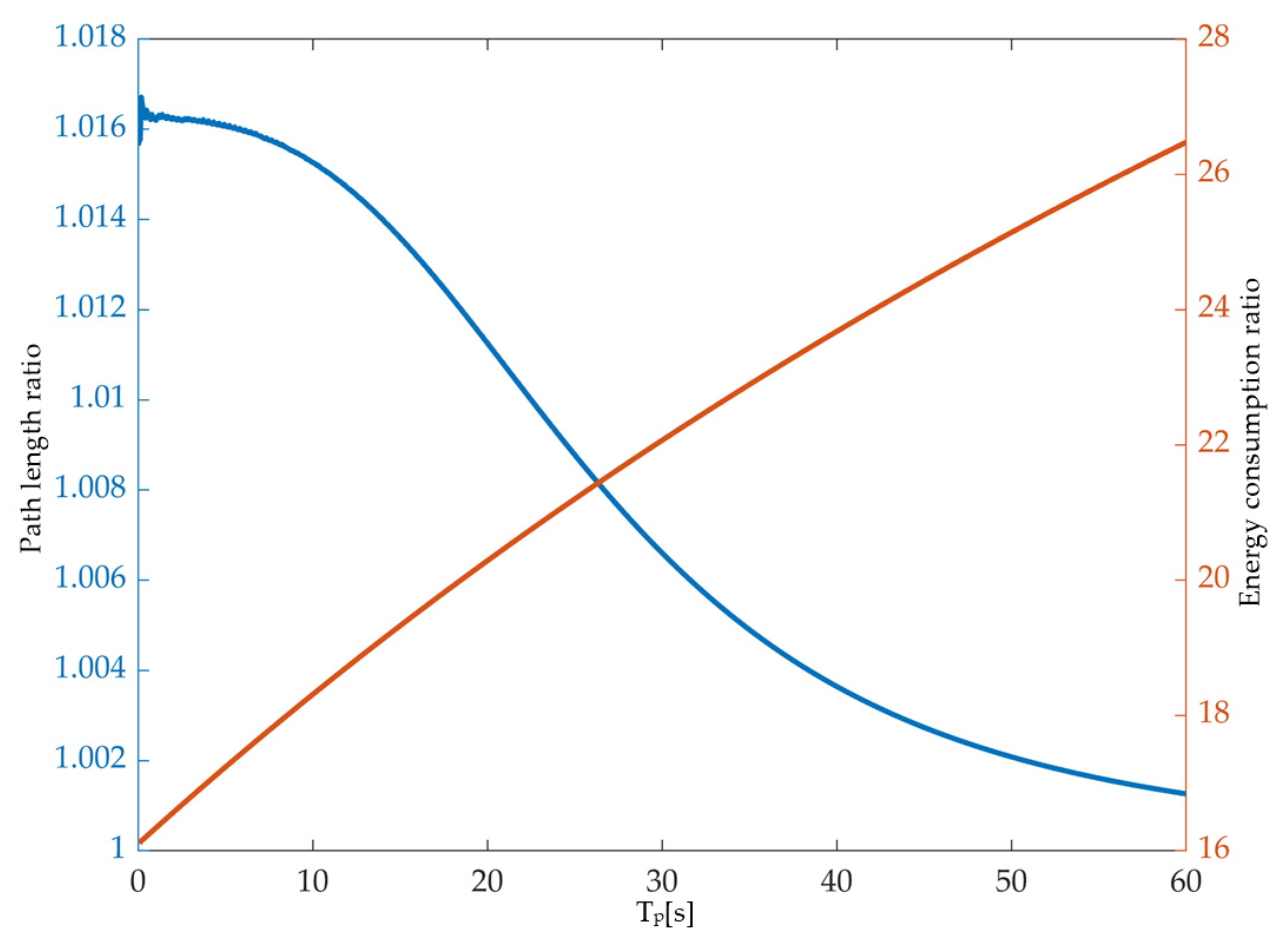
From the motion planning of SITMSRS and motion optimization model based on energy saving, it can be seen that Ndis is closely related to the simulation accuracy of a given motion trajectory. The ground motion simulation error of SIT is large when Ndis is small, which, obviously, does not meet the simulation requirements. This is because when the motion of SITS is determined, the fewer the number of discrete points, the greater the deviation of the motion trajectory between two adjacent discrete points, and the greater the error between the corresponding velocity and angular velocity and the ideal state. The trajectory simulation precision will continue to improve as Ndis continues to increase and it is paradoxical that the total number of paths will also increase exponentially leading to lower efficiency in solving the optimal trajectory.
Motion planning of the given trajectory of SITS can be adopted to select the optimized
Ndis, the approach of polynomial fitting is used to carry out the continuity of the discrete path of SITMSRS. Optimal selection process of
Ndis is depicted in
Figure 6.
Nd0 represents iteration initial value of
Ndis.
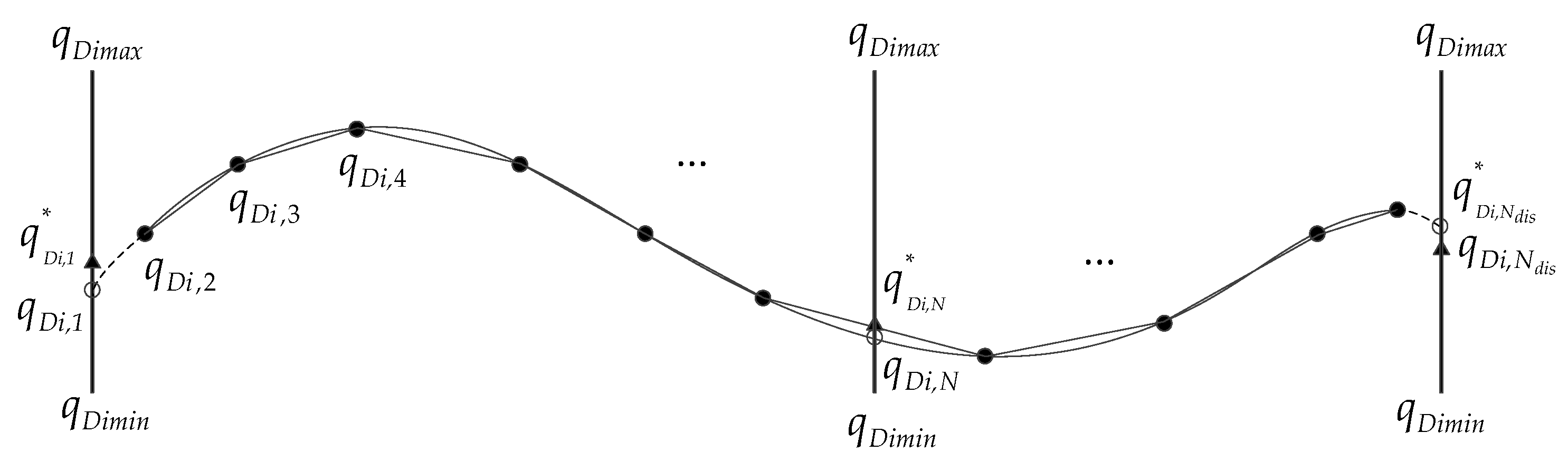
The optimization flow above can be applied to the case where there are multiple discontinuous singular positions of the path to be optimized of SITMSRS.
Figure 7 elaborates the motion optimization approach in the case of non-continuous singular path points. Here,
,
, and
are true values of path initial singularity, singularity at discrete point
N, and path terminal singularity, respectively.
Approximate solutions of joint angular displacements at finite intermittent singular points can be achieved by choosing the appropriate Ndis through the above approach, which reduces the complexity of path optimization at a certain level.
4.3. Solution to the Optimal Path with Discontinuous Singularity Configuration
4.3.1. Complete Path Solution Space Generation of Joints Power
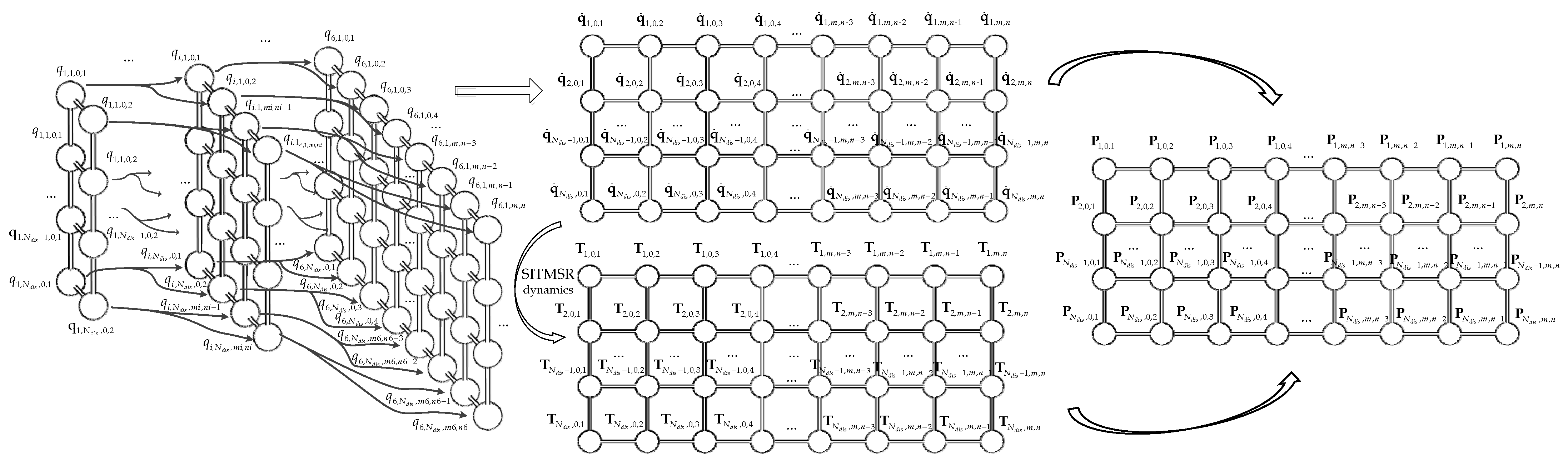
In the compound movement of each joint of SITMSR to simulate the planned motion of SIT, there are several sets of solutions at each discrete point to satisfy a given position and attitude. Complete energy consumption path solution space is needed to generate by expanding the solution of each joint at each discrete path point into a full solution matrix.
Figure 8 illustrates the generation process of complete path solution space of joint power.
and
in
Figure 8 represent the (10
mi+
ni)-th angular displacement solution and solution vector when
qi at path discrete point
Ndis, respectively.
and
are the corresponding joint driving torque and joint energy consumption solution vectors, respectively.
mi,
ni, and
are calculated as follows:
where
Nisol is the number of solutions of
and
Nsol is the maximum value of
Nisol at all path discrete points of SITMSR.
4.3.2. Directed Motion Paths Construction of Energy Consumption
Constructing a networked directed non-circular motion paths of joints energy consumption of SITMSR, consisting of path nodes, directed paths, and path weights, is carried out to implement the path optimization of SITMSR on the basis of generating complete path solution space of joints power. The path node of energy consumption takes each vector of the path solution space as a node, and all nodes in the path are numbered in order. In addition, the start node and the end node are added to form a complete path to be optimized. The average of the product of the path discrete time and the sum of the energy consumption is used as the weight of the path between the two nodes except the start node and the end node. The nodes in the first row have one path weight to the initial node and
Nsol path weights to other nodes. The node in row
Ndis has one path weight to the destination node and
Nsol path weights to other nodes. Aside from the first and last two rows, the number of input path weights and output path weights of other nodes are both
Nsol.
Figure 9 constructs the directed energy consumption path without continuous singularity of SITMSR.
4.3.3. Solution to Optimal Energy Consumption Path with Discontinuous Singularity
From the building of directed energy consumption path, solving the optimal path of SITMSR is searching the shortest path starting from the initial node to the end node, which meet the requirements of Equations (8) and (9). The node vectors and the corresponding weight vectors need to be established first, and then get the shortest path from the created directed motion paths through the Dijkstra algorithm. Other shortest path or second-shortest path can be achieved by repeatedly calling the Dijkstra algorithm on the basis of modifying the weight vector. The solution to the optimal path based on energy saving without continuous singularity is described as follows:
Step 1: Calculate the starting node vector from node (NdisNsol+1) to the Nsol nodes in the first row, end node vector , and corresponding path weight vector .
Step 2: Compute the starting node vector between node k located from row one to row (Ndis − 1) and the next row of nodes, end node vector , and weight vector . Here, .
The expression of
,
, and
are given as follows:
In Equations (18)–(25), the definition of is to obtain path discrete point sequence number where the node k is located. is introduced to get the row number and the column number of the solution vector where node k is located.
Step 3: Obtain the starting node vector from the Nsol nodes in row Ndis to node , end node vector , and corresponding path weight vector .
In Steps 1 and 3, node
and node
are artificially added nodes to construct the solution path to minimum energy consumption, which do not affect the solution of the optimal path. Consequently, the path weight between the initial node and the end node, and other directly connected nodes, can be set as a constant; here we take its value as 1.
,
,
,
,
, and
can be presented as follows:
Step 4: Form the complete start node vector , end node vector , and weight vector of SITMSR motion path to be optimized.
Step 5: Use the Dijkstra algorithm to solve one shortest path from node to node , and acquire the node number vector , path weight vector , and path value of .
Step 6: Traverse the path weights of other nodes except the node paths related to the initial node and the end node of in Step 5 one by one, and individually assign a new weight of . Update the path weight vector before solving the new directional motion path and remove duplicate path solutions to achieve the vector of the node solution number, the path weight vector, and the path value of the other shortest paths.
Step 7: Reverse coding to acquire SITMSR joint angle matrix which corresponds to the node number vector in the shortest motion path . Determine the optimal energy consumption path by comparing the maximum joint jitter. Here it is assumed that the optimal path is , and the node number vector, the path weight vector, and the path value are , , and , respectively.
The values of the objective functions can be determined through Step 7 by:
Step 8: Extract each path node except node and node of , and get the of SITMSR according to the directional motion path and the coding rules in the complete solution space and motion simulation errors by the first three constraints in Equation (9).
4.4. Solution to the Optimal Singular Path
Since the finite number of discontinuous singular points can be solved by trajectory planning, the main focus here is on the condition of the continuous singularity configuration. When SITMSR is in the singular motion path, theoretically, there are countless solutions because of the coupled motion of multi-axis motion. Singularity configuration makes it difficult to directly solve the optimal motion path based on energy saving by way of the directed node path. The reason is that when there is no singular position, the path weight between the nodes of the SITMSR path network is unique. However, there are countless path weights between the nodes at each discrete location in the singular path.
When solving the optimal energy consumption path of SITMSR with multipoint singular position and continuous singular position in given trajectory of SITS, the joint angular displacements of the singular position at the discrete point
N can be set as unknown variables to be optimized. Assume that the joint angle of the coupled motion axis caused by the singularity configuration is
, and, thus, the total number of additional parameters to be optimized in the complete path solution space is
. The constraints of
are:
where
is the (10
mi+
ni)-th solution of
at path discrete point
N.
It is hard to solve the above situation by directly using the path optimization method under the condition of non-continuous singularity position. An approximate method is to assume that the angular displacements of the coupled joints have motion constraints, and then decouple the joint motions at singular positions. The minimum energy consumption path is obtained by adjusting the coupling coefficient and using the solution algorithm for non-continuous singular configuration. The linear relationship of the coupled joints can be expressed as:
where
is the coupling factors of
.
Another feasible method is to take the objective function, constraint function, and constraint function of the coupling joint as the fitness function of the intelligent optimization algorithm to solve the above problems. The problem with this method is that when Di and Ndis are small, the optimal motion path of SITMSR can be achieved. Nevertheless, the convergence process of the above optimization method is longer and the optimization fails in the case where Ndis takes a larger value. Therefore, it is necessary to improve the path optimization algorithm for the non-singular condition, so that it can handle path optimization at the SITMSR singularity configuration.
When generating the complete path solution space of energy consumption with singular positions, take the joint angle constraint relationship in Equation (32) of the coupled joint as a whole, and combine with the other uncoupled joint angle displacements to form the whole path solution space. When SITMSR is in a path with singularity,
is defined as:
The optimal path of the uncoupled joints and the optimal path of the constraint relationship of the coupled joints can be acquired according to the first seven steps when optimizing with non-singular paths on the basis of generating the complete solution space of the singular path and the corresponding directional motion path on the basis of solving the optimal path of the coupling joints, which form together.
To solve the optimal motion path of each coupled joint angle, the decoupling mathematical optimization model needs to be additionally introduced for secondary optimization to gain the coupled joint angle displacements for any value of
to get the minimum value of objective function
f2 under path constraints
. It is an optimization problem with linear constraints, which can be expressed as:
where
is the value at the discrete point
N of
and
is the power of
.
The optimal path of each coupled joint under the singular path can be sought through applying the global optimization algorithm to decoupling the mathematical optimization model above. The optimal energy consumption trajectory of the uncoupled joint can be obtained according to Step 8 in the solution to the optimal path without singularity and the path fitting based on the polynomial difference.
6. Conclusions
In this paper, a motion planning method of SITMSR based on energy saving and its corresponding joint trajectory solving algorithm are proposed. Simulations based on different given motions of SIT in the ground experiment are conducted to verify the effectiveness of presented approach. The above research mainly consists of three parts: first, the motion trajectory and accuracy requirements of SIT are mapped to the ground test system (SITMSRS); second, discrete optimization mathematical model and constraints of energy consumption of SITMSR are established; third, the Dijkstra algorithm and adding the global optimization algorithm are used to get the solutions of the SITMSR path with minimal energy consumption under the condition of discontinuous singularity configuration and continuous singularity configuration, and the trajectory of each joint is obtained through polynomial fitting and discretization of solved path.
The general form of SIT makes it difficult for ground simulation robots to avoid singular positions completely, which brings new challenges to motion planning based on energy optimization. The proposed method is based on the kinematics and dynamics of the robot, which helps to solve the problem of optimal energy consumption when manipulator exists singularity configuration under a given end trajectory. From the results in this paper, the robot consumes less energy in singularity configuration under the premise that the trajectory of the motion is satisfied. In addition, the motion planning method based on energy saving is also applicable to 7-DOF manipulators and robot systems with more DOF. The algorithm presented can obtain the global optimal solution. However, the dynamics of the robot becomes complicated with the increase of DOF, which will increase the computation amount of the proposed method and the cost of hardware implementation.
Future work will further improve the efficiency of the algorithm operation. The main work is speeding up the generation process of complete path solution space of joints power based on robot dynamics. The interface of cyber–human interaction will need to be designed and the motion planning method will need to be embedded in the real-time software of the ground semi-physical test system. High-performance computer hardware will be used to support the operation of the algorithm. In addition, joint stiffness should be considered when the proposed method is applied to a cooperative manipulator with 7-DOF or robots with more DOF. The evaluation will be carried out to quantify its impact on energy consumption in the process of robot motion planning.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}