1. Introduction
The importance of safety inspection of trains lies at the core of maintaining railway operational integrity and minimising potential risks in the modern transportation industry. Systems embedded within trains, such as the axle assemblies, the motive power units, and the braking mechanisms, are among the critical components that constitute the running gear of these transport systems. Since many of these elements are situated externally, particularly those affixed underneath the trains, they are highly susceptible to functional impairments. Their vulnerabilities come from factors like continual vibrations, progressive ageing, and various unpredictable environmental impacts, leading to potential disruptions such as parts displacement, deformation, bolt loss, and fluid leakage. Efficient maintenance and reliable inspection processes are pivotal to ensuring the safe commute of millions of passengers daily and efficient transportation of goods, highlighting its undeniable importance for societal functioning and economic stability. Identifying missing bolts assumes particular significance among the countless components subject to these inspection processes. Although small, bolts are crucial in securely holding the train components together. Over time, due to wear and tear or even a manufacturing anomaly, bolts may become missing, leading to loose connections and posing a severe safety hazard, including possible derailment. Therefore, timely detection of missing bolts is indispensable for maintaining the reliability and safety of trains, preventing accidents, and minimising the risk of catastrophic failures. This paper addresses the challenges associated with existing methods of bolt detection, emphasising the need for advanced technological solutions, particularly in the context of edge devices, where conventional approaches often fall short.
While deep learning models primarily designed for detecting missing bolts have shown potential, their extensive architecture often makes for unfeasible deployment, notably causing inefficiencies on-device. The standard model compression techniques used to address issues of memory footprint and latency frequently cause a decrease in analytical capabilities, limiting them from achieving the vital high-accuracy inspection of critical train components. Furthermore, traditional techniques reliant on feature extraction or rule-based solutions prove equally unsuitable. Models crafted to cater to standard cloud computing systems face many challenges when transitioning for execution on edge devices, which are characterised by constrained resources. Specifically, convolutional layers in deep CNNs entail substantial MACs (multiply and accumulate) operations. Local receptive fields focus on partial context. Two-stage object detectors like Faster R-CNN require costly region proposal generation. To address these, we propose evaluating convolutional vision transformers like ViT and CCT. Their attention mechanism captures global context relations while needing fewer parameters. ViT patchification and CCT hybrid design enhance computational performance. Compared to CNNs, transformers demonstrate generalised reasoning, not just statistical learning. Pre-training on large datasets improves robustness. We benchmark transformer architectures against CNNs to identify optimal edge-based missing bolt classifiers attaining high accuracy under tight resource constraints. Moreover, factors such as limited computing capacity, finite memory and power quotas, stringent requirements of runtime efficiency, and connection considerations for isolated operations render several existing solutions inefficient. Weak processors struggle with floating point operations, leading to slow inference that is unsuitable for real-time needs. Minimal storage is inadequate for retaining huge datasets commonly relied on by data-hungry deep-learning algorithms. The absence of cloud connectivity impedes model updates or offloading. Together, these hurdles necessitate highly optimised architectures. The proposed vision transformers offer solutions through multiple advantages. Their attention mechanism reduces parameters in comparison to convolutional kernels. Patch embedding projections shrink the input footprint. Positional encoding circumvents rely solely on data. Hybrid designs fuse the benefits of CNN and transformer architectures. Additionally, large-scale pre-training provides generalisable feature representations, limiting data needs during fine-tuning. Overall, the transformers require fewer parameters, operations, and data samples. Our study empirically evaluates them against standard CNNs on missing bolt classification to quantify computational accuracy trade-offs. The experiments inform guidelines for transitioning state-of-the-art deep learning to safety-critical railway inspection while accounting for edge hardware realities.
Conventionally, computer vision methodologies rely heavily on object detection for bolt localisation, which inevitably places further constraints. Dense object detectors notably strain edge devices with limited resources, given their high computational demand. Single-stage detectors, such as YOLO [
1] and SSD [
2], fall short in localisation accuracy compared to their dual-stage counterparts. However, two-stage frameworks like Faster R-CNN [
3] often present high latency periods, making them unfit for real-time inference applications. Hence, these detector architectures can easily overwhelm edge devices due to intricate multiphase computations, leading to substandard performance even with elaborate parameter tuning. Since safety-critical tasks demand precise localisation, object detection presents considerable challenges on edge hardware. As a result, classification has emerged as a more reliable and efficient alternative for pinpointing missing bolts on such devices. Recent years have seen significant progress in image classification, bolstered by the introduction of sophisticated neural network structures, including convolutional neural networks (CNNs) [
4] and recurrent neural networks (RNNs) [
5]. These advancements have driven groundbreaking developments in computer vision, natural language processing, and speech recognition.
Particularly, CNNs have shown exemplary performance in image classification tasks, aided by advanced models like VGGNet [
6], ResNet [
7], and Inception [
8], among others. These models draw their power from deep layers of interconnected neurons, which are made feasible by large-scale datasets and potent computational resources such as GPUs and cloud computing. This has enhanced accuracy, expedited training times, and expanded capabilities to address complex real-world problems such as diabetic retinopathy detection [
9], pallet racking inspection [
10], emotion detection [
11], etc. Moreover, transfer learning [
12] and pre-trained models [
13] have gained popularity, enabling knowledge to shift from one domain to another with minimal training on limited datasets. Novel deep learning models like vision transformers (ViTs) [
14], which leverage self-attention mechanisms, have also demonstrated promising outcomes. We aim to combine the strength of these deep learning algorithms to devise a precise and robust system capable of identifying and localising damage in rail component systems. By predominantly focusing on the recognition aspect, classification models optimise accuracy without imposing substantial computational costs for localisation. With their streamlined predictions, these models seem well-suited to undertake the task of missing bolt detection on edge devices.
Through our research, we aspire to significantly elevate the precision of railway component inspections and minimise potential transport hazards, thereby contributing to overall safety within the industry. Furthermore, while transformer-based solutions such as the vision transformer (ViT) [
14] and compact convolutional transformer (CCT) [
15] have shown significant promise for complex vision tasks, our research aims to investigate and introduce these advanced architectures as viable alternatives to existing bolt detection methodologies. Notably, these transformer models can potentially achieve high-accuracy detection with fewer computational resources than conventional mechanisms, providing suitability for deployment on resource-constrained edge devices. As part of our objectives, we intend to evaluate tailored variants of ViT and CCT optimized specifically for the bolt classification task at hand so as to integrate these innovative solutions into mainstream safety inspection practices within the railway sector, potentially spearheading a comprehensive transformation in monitoring approaches. The core contributions encompass (a) the creation of a realistic bolts image dataset, (b) quantitative benchmarking of CNNs, ViTs, and CCTs for missing bolt identification capability and computational viability analysis, (c) determination of the optimal technique, and (d) assessment of deployability constraints to inform potential adoption procedures.
This paper is structured as follows: Section I covers the introduction, emphasising the significance of safety inspections for trains while highlighting the limitations of traditional machine vision techniques for missing bolt identification. It establishes the context, needs, and objectives of developing an accurate computer vision-based solution.
Section 2 reviews existing literature on computer vision approaches for detection and classification tasks related to train components, fasteners, and prior work leveraging vision transformers. This discussion of current research contextualises BoltVision’s innovations and distinguishing factors.
Section 3 presents the methodology, dataset details, proposed architectures, and our training process.
Section 4 documents the quantitative results, comparative analysis, key inferences, and critical discussion regarding the evaluation of the CNN, ViT, and CCT models from our experiments.
Section 5 discusses the efficacy of BoltVision for addressing railway inspection use cases, outlines its merits over existing solutions, and considers the potential scope for further enhancements in future work. Finally,
Section 6 concludes the study.
By presenting a detailed comparative study between convolutional and transformer architectures for missing bolt classification in trains, validated through rigorous experimentation, this paper makes significant contributions to research at the intersection of computer vision, predictive maintenance, and transportation infrastructure monitoring. It offers unique insights into the promise of vision transformers, so far unexplored, for precision safety inspection in railways. The findings reveal their superiority in striving for accuracy and computational efficiency, which are vital for practical edge deployment to enable real-time embedded assessments during train runs. By highlighting BoltVision’s capabilities in a novel application context, this work expands the academic knowledge base for leveraging state-of-the-art deep learning in the railway industry to build safer, more reliable next-generation transportation networks.
3. Methodology
3.1. Dataset
As with any machine learning effort, an indispensable aspect of our research strategy is the selection and compilation of a robust dataset to train and assess the effectiveness of our “BoltVision” model. The dataset used in this study has been collected from actual train bogies axles using a 12 MP iPhone camera manufactured by Apple Inc., headquartered in Cupertino, California. This camera was chosen to simulate a Raspberry Pi imaging sensor that may be deployed for edge-based inference in practical railway environments. The author manually annotated the entire assemblage to categorize each image as either containing bolts or missing bolts. Careful consideration was given to capturing visuals reflecting the complexities of real-world inspection conditions, including occlusions, rust, oil stains, scaling, and variability across train component subsections. The images focus specifically on sections containing bolts, depicting samples of intact and missing bolts.
The images were captured with meticulous attention to the operating environment and the positioning of the device. The dataset comprises a diverse set of 145 images, resized to a resolution of 224 × 224 for standardisation across the dataset, and evenly divided into two categories—bolt-present and bolt-missing imagery. This specific categorisation allows the model to learn and recognise patterns associated with the two states of bolt-related scenarios in train components.
During the image capture process, every effort was made to emulate the viewpoint of the proposed edge device in its prospective deployment setting. This careful curation approach ensures practical training and evaluation of our “BoltVision” system applied to real-world scenarios. The dataset provides an essential foundation for the proposed bolt detection mechanism, adapting convolutional neural network models, vision transformers (ViTs), and compact convolutional transformers (CCTs) to analyse images accurately. In executing this dataset curation strategy, we aimed to devise a ground-truth set that would serve as a solid basis for our research, catering to various real-world conditions found in railway component inspection scenarios.
Figure 1 displays representative images from the two categories of our dataset—instances with bolts present and those with missing bolts. In images corresponding to the bolt-present class (
Figure 1A), the classification task is direct, as the model’s primary objective is to discern the presence of bolts amidst the background components. In contrast, images belonging to the bolt-missing class (
Figure 1B) are characterised by the absence of bolts in several instances. For example, the bolt absence is strikingly apparent in the right image showcased in
Figure 1B. Alternatively, the middle image of
Figure 1B contains an instance where a missing bolt is not immediately identifiable compared to the images located furthest to the right and left. It is crucial to recognise that all images within our dataset comprise a background context, which must be accounted for when implementing augmentation techniques. This preserves the environmental context during the modelling process.
Through the compilation of this fundamental dataset, our endeavours aim to establish a robust base for training and assessment of the proposed “BoltVision” system employing convolutional neural network models supplemented by attention mechanisms. Our dataset incorporates diverse images depicting the present and missing bolts, enabling the proposed model to learn and extrapolate patterns associated with the different bolt conditions. However, potential sources of bias may stem from the limited dataset size as well as singleton manual annotation, allowing the possibility of labelling errors or missed edge cases. Usage of a consistent camera type under similar lighting conditions can potentially overfit models to the specific visual signature. However, the diversity of components, damage modes, and imaging angles coupled with balanced category distribution helps mitigate these risks and facilitate more robust model learning translatable to real testbeds. Future work should focus on expanding the visual data corpus through additional railway asset images under various operational and environmental settings to further enhance generalisation.
3.2. Data Augmentation
Data augmentation techniques are leveraged during training to expand the diversity of images available for learning robust data representations. In the context of our paper on BoltVision, data augmentation assumes paramount importance as it serves as a pivotal strategy to enhance the model’s efficacy in safety inspection for train components. The diverse and realistic variations introduced through data augmentation simulate the dynamic conditions that the model may encounter during deployment. In the construction of BoltVision, a dual-framework approach was employed, utilising Keras with TensorFlow for the custom model and the PyTorch framework for pre-trained models like the vision transformer (ViT). The data augmentation strategies varied between the custom model and PyTorch-based pre-trained models.
For the custom model developed using Keras and TensorFlow, feature-wise normalisation, centre shearing, and a suite of other augmentations ensure the model’s adaptability to varying perspectives, lighting conditions, and potential distortions in real-world scenarios, as shown in
Figure 2.
3.2.1. Feature-Wise Normalization
This rescales the pixel intensities across channels as per Equation (1), where is the input, is the mean, and is the standard deviation. By normalising each channel independently, model overfitting is reduced.
3.2.2. Feature-Wise Centre
Similar to normalisation, feature-wise centring independently shifts the mean of each channel to zero; based on Equation (2), data distribution centring further improves generalisation by removing the mean image.
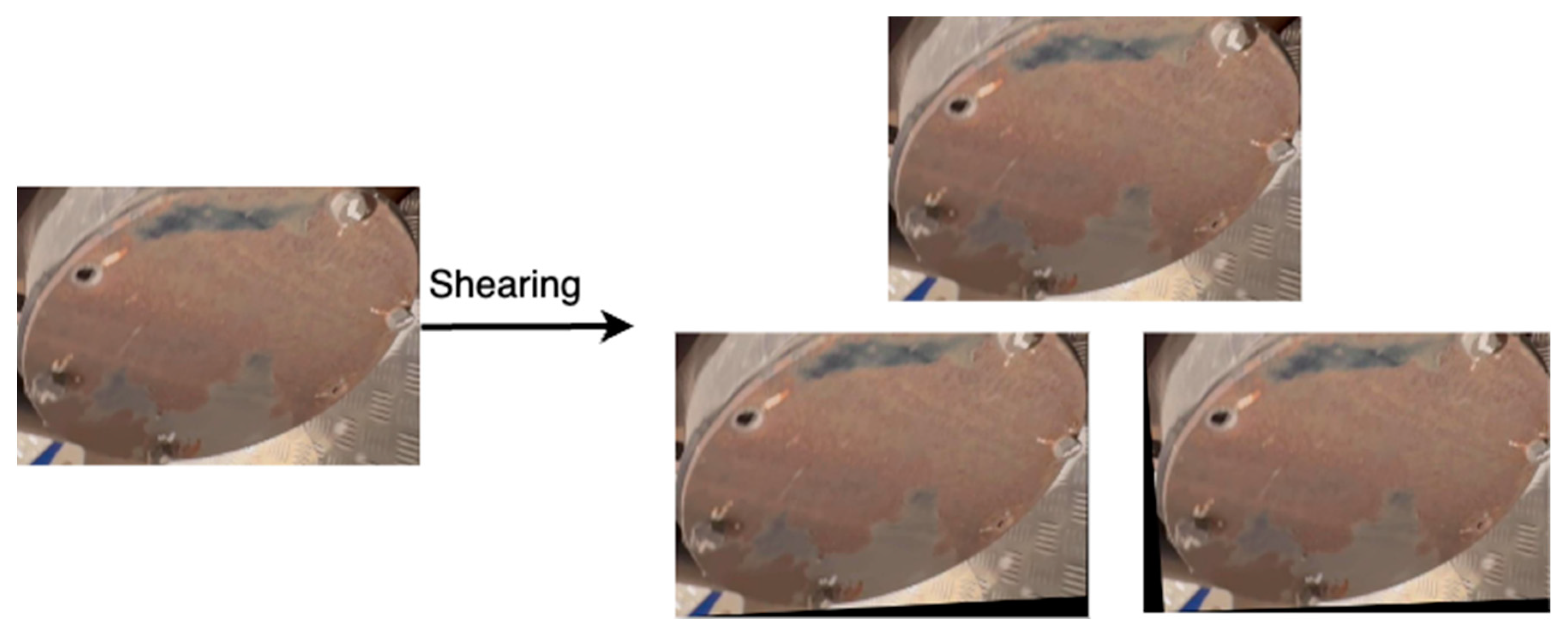
3.2.3. Shearing Transformation
Geometric image warping is applied by selectively skewing rows of pixels horizontally or vertically. By generating sheared versions (
Figure 3), model robustness against affine transformations improves.
3.2.4. Additional Augmentations
Apart from normalisation, centring, and shearing, several other augmentations are applied to the image dataset to enable robust model generalisation:
Width/Height Shifting: Images are shifted horizontally or vertically by fractions of the image dimensions as in Equation (3). This induces translational invariance against position variations.
where
,
and
is chosen randomly between [0,0.2]
Rotation: Arbitrary image rotation by angle
Equation (4) increases model invariance to bolt orientation. Values of
vary randomly for each epoch between −45° to +45°.
Zooming: Images are resized by a random scale factor
as per Equation (5) to simulate distance variation. This augments scale invariance.
where
is randomly picked in [0.5,1.5].
Brightness: By increasing or decreasing brightness, as in Equation (6), the model becomes agnostic to illumination variations.
where
varies randomly between [−0.2,0.2]
Along with flipping and fill-mode padding, these augmentations equip the model to handle practical complexities associated with missing bolt classification from in situ edge deployment perspectives.
For the vision transformer architecture leveraged through PyTorch, we utilise the default augmentations employed during the original ViT pre-training. These include random cropping on input images of size 224 × 224, along with horizontal flipping. The default augmentations aim to simulate real-world variations encountered during image capture, facilitating the model’s ability to generalise across different scenarios. Specifically, random horizontal flips are applied to replicate mirror images, rotations simulate varying orientations, and adjustments in brightness and contrast emulate changes in lighting conditions [
26]. By reusing the same strategies, transforming invariances learned during pre-training transfer leads to performance improvements on our bolt classification task.
In summary, this dual-strategy approach ensures that the custom model benefits from tailored augmentations while pre-trained models like ViT retain the augmentation strategies embedded in their original training, collectively fostering a robust and versatile training dataset for BoltVision. Our data augmentation strategy, with its diverse set of techniques, was designed to avoid overfitting, improve model generalisation, and eventually enhance the overall performance of our BoltVision system.
3.3. Model Architectures
Within machine learning, the choice of model architecture forms the fundamental building block driving performance capability on a given task. Architectural innovations focused on specialised components for improved representation learning and clever inductive biases for efficient generalisation remain pivotal to advancing the frontiers of computer vision. In our study, BoltVision explores a diverse set of model architectures, experimenting with convolutional neural networks (CNNs), both in sequential and attention-based configurations, a vision transformer (ViT) in its pre-trained and custom-formulated variants, as well as the custom compact convolutional transformer (CCT).
The selection of the specific architectures exploited in “BoltVision” in the form of convolutional neural networks (CNNs), vision transformers (ViTs), and compact convolutional transformers (CCTs) was underpinned for several reasons. CNNs have been at the forefront of image classification tasks for years due to their proven practical ability to self-learn and extract salient features from images, making them a natural choice in developing a solution for the bolt classification [
27]. However, while CNNs are robust in spatial feature extraction, they need the ability to understand the broader contextual information within images, a gap aptly filled by transformer architectures [
28]. Vision transformers (ViTs) and compact convolutional transformers (CCTs) can capture complex feature relationships across an entire image due to their inherent self-attention mechanism, enabling superior understandings of contextual patterns compared to traditional networks. Furthermore, ViT and CCT are less reliant on computationally expensive convolution operations, making them a desirable option for edge device deployment where computational resources are limited [
29]. Therefore, the combination of these architectures in our study capitalised on the strengths of both CNNs and transformer models to develop an efficient, high-performing, and context-aware system for bolt detection.
3.3.1. Sequential CNN
As a baseline model, we implement a sequential convolutional neural network (CNN) architecture for the binary missing bolt classification task. The model comprises a series of convolutional blocks sequenced hierarchically for progressively extracting spatial visual features and mapping them into successively abstract representational spaces. The architecture of the sequential CNN is given in
Figure 4.
Input Layer: The input colour images of dimension 224 × 224 pixels are normalised but retain their three channels (RGB).
Convolutional Block: Each convolutional block consists of a 2D convolutional layer, activating through a ReLU non-linearity, followed by max-pooling for spatial downsampling. Convolution operation for feature extraction is defined in Equation (7), where l denotes layer index,
is input,
refers to learned filters, b is bias, and
denotes convolution. Multiple such blocks enhance representational capacity.
Flatten and Fully Connected Blocks: The convolutional feature hierarchy gets flattened into a unidimensional vector fed as input to a sequence of fully connected layers for classification. Dropout regularisation is utilised during training.
Output Layer: Final binary bolt-missing/present classification probabilities are computed through a SoftMax output layer as in Equation (8), where
is the pre-activation input and the output denotes the probability prediction for each class.
Through systematic experimentation and analysis of this CNN architecture, we determine an effective baseline missing bolt classification performance to quantify the benefits of more complex vision models.
3.3.2. Attention-Based Convolutional Neural Network
In addition to the sequential CNN, we experimented with an attention-mechanism-enhanced CNN model for missing bolt classification. The architecture explored comprises 15 CNN convolutions for enriched multi-scale representational learning as proposed by the paper [
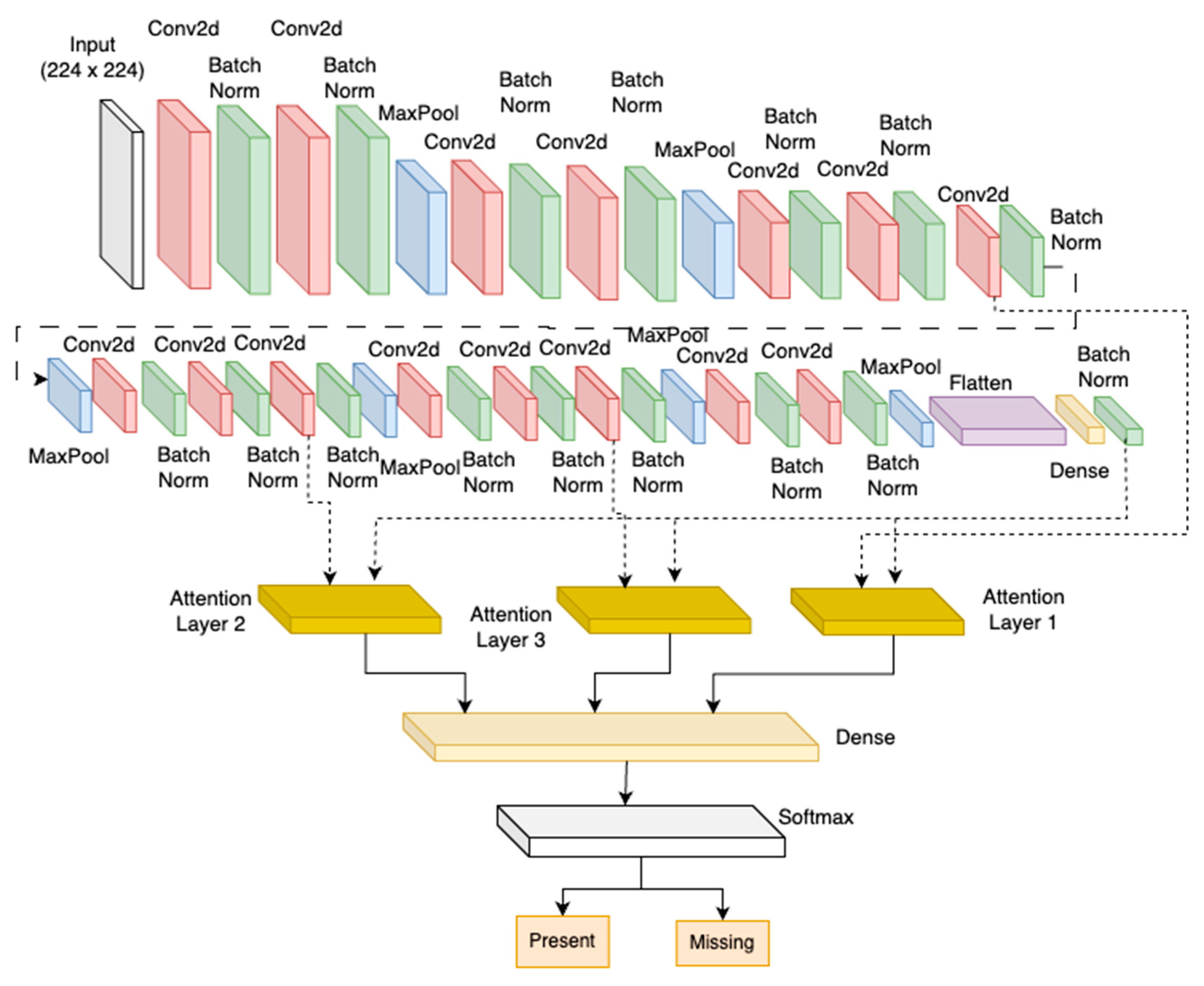
30]. In each connection, the input undergoes a series of operations, including a convolutional operation, batch normalisation to stabilise training, and a max-pooling operation for spatial downsampling. The resulting feature maps from the connections are concatenated to form a comprehensive representation of spatial hierarchies captured at different scales. The architecture of the attention-based CNN can be seen in
Figure 5.
This concatenated feature map is then processed through a dense layer with a single unit and a SoftMax activation function.
Input Layer: Based on the specifications, the input layer of the model is designed to accept grayscale images with a dimension of 224 × 224 and three channels, representing the red, green, and blue colour channels. The model can process images with high detail and colour accuracy, allowing for more precise image recognition and analysis. The dimensions of the input layer are critical in determining the quality and accuracy of the model’s output, making it essential to ensure that the input images are of the correct size and colour depth for optimal results.
Convolutional Layers: The attention CNN architecture in BoltVision incorporates 16 connections of CNN layers, each utilising a distinct kernel size 3 × 3. These connections allow the model to capture features at multiple scales, enabling a more comprehensive understanding of spatial hierarchies within the input images. The ReLU activation function is applied to all layers. Every parallel connection has a batch normalisation layer and a max pooling layer with a size of 2 × 2.
Attention Mechanism: The output of the 7th, 10th, and 13th convolutional layer has been subjected to an attention mechanism that employs a dense layer of 1 unit and SoftMax activation to obtain attention weights. The resulting attention output is obtained by multiplying the concatenated output and the attention weights. This is represented by Equations (9) and (10) in the attention mechanism equation.
In this equation, we use to represent the query vector, which reflects the current state of the network or decoder. represents the key vectors that reflect the input or encoder states, while represents the value vectors associated with those states. is the attention matrix, which assigns importance weights to the input states. We apply the function to the scaled dot product of and to calculate . The resulting attention matrix reflects the importance assigned to each input state. Finally, we calculate the context vector by multiplying the attention matrix with the value vectors.
Dense Layer with SoftMax Activation: The result of the attention is then passed through a dense layer with a single unit. The SoftMax activation function is applied to the output, ensuring the final prediction represents the attention-weighted combination of features from different kernel sizes. This step is crucial for the model to make informed decisions regarding the presence or absence of missing bolts.
Flatten Layer: Flattening the attention output is crucial to ensure seamless processing. This enables it to be easily inputted into dense layers, ultimately leading to better results.
Fully Connected Layers: Following the convolutional layers and the attention component, the architecture incorporates two dense layers that are fully connected. The first layer comprises 512 units and the second has 256 units, both using Relu activation. Moreover, each layer involves a batch normalisation layer to ensure performance regularisation.
Output Layer: The output is produced by a final layer with three units and SoftMax activation.
3.3.3. Compact Convolutional Transformer (CCT)
The compact convolutional transformer (CCT) is a novel architecture developed by BoltVision that effectively combines the benefits of convolutional layers and transformer-based models. This innovative approach successfully bridges the gap between the two architectures, resulting in a high-performing and efficient model [
29]. The CCT’s design prioritises efficiency without sacrificing performance, making it ideal for real-time data processing applications. By integrating the strengths of both architectures, CCT provides a powerful tool for a range of tasks that require image or sequence processing.
Figure 6 presents the architecture of the CCT.
Convolutional Tokenizer: This section aims to extract critical characteristics from the given image. This is accomplished through a series of convolutional layers, utilising a kernel size of 3 and a stride of 1 and incorporating 1-unit padding. Then, a pooling operation is executed. This procedure results in a collection of patches, each representing a distinct image segment. These patches are subsequently transmitted to the transformer encoder block for further refinement.
Transformer with Sequence Pooling: The first component of this layer is known as the transformer encoder, which is designed to understand the relationship between different patches obtained by the convolutional tokenizer block. It comprises eight transformer layers and four attention heads, with 64 projection dimensions. This section utilises a multi-head attention method that enables the model to focus on specific areas of the image while considering the entire image. The output of this process is then directed to sequence pooling, which uses an attention-based technique to pool over the sequence of tokens. This refinement reduces computation slightly by forwarding one less token.
The transformer encoder block improves the features extracted by the multi-head attention mechanism using a feed-forward network (MLP). The transformer units of the transformer encoder have been set to 128. The output of the transformer encoder block is then processed through several FC layers to produce the final classification. These FC layers consist of three dense layers—the first dense layer has 512 units, the second dense layer has 256 units, and the final dense layer has 3 units. The last layer applies a SoftMax activation function to output the probability of each class.
The CCT architecture in BoltVision balances computational efficiency and performance, providing a promising solution for safety inspection tasks. Integrating convolutional and transformer components allows CCT to capture local and global features effectively, making it a valuable contender in exploring models for missing bolt classification.
3.3.4. Vision Transformer (ViT)
The vision transformer (ViT) implemented in BoltVision represents a pioneering architecture that leverages the transformer model’s success in natural language processing for image classification tasks inspired by previous research [
14]. ViT replaces traditional convolutional layers with self-attention mechanisms, enabling the model to capture global contextual information efficiently. The architecture of ViT is illustrated in
Figure 7.
Embedding Layer: The ViT begins with an embedding layer that linearly projects flattened image patches into embedding vectors. This step allows the model to treat the image as a sequence of embeddings, enabling the application of the transformer architecture.
Mathematically, the embedding operation is represented by Equation (11).
where
X is the flattened image patches,
is the weight matrix, and
is the bias term.
Transformer Encoder: The core of ViT is the transformer encoder, which is composed of multiple layers of self-attention mechanisms. The attention mechanism allows the model to capture dependencies between different patches, enabling an understanding of the global relationship within the image. Mathematically, the attention-weighted sum is expressed with Equation (12) [
14].
where
Q,
K, and
V represent the query, key, and value matrices, respectively, and
are the dimensions of the key vectors.
Classification Head: Following the transformer encoder, ViT employs a classification head, typically consisting of fully connected layers, to produce the final output. The output is then processed through a SoftMax activation function for image classification.
3.3.5. Pre-Trained Vision Transformer (Pre-trained ViT)
For enhanced performance and efficiency, BoltVision leverages a pre-trained ViT. Transfer learning is employed, where a ViT model is pre-trained on a large dataset, such as ImageNet, before fine-tuning the specific task of missing bolt classification.
The equations associated with pre-trained ViT involve the same embedding, transformer encoder, and classification head operations described above, with the parameters already optimised during pre-training.
The utilisation of ViT and pre-trained ViT in BoltVision reflects a commitment to harnessing the power of transformer-based architectures for image classification tasks, providing a solid foundation for the accurate identification of missing bolts in train components.
3.4. Model Hyperparameters and Training Setup
3.4.1. Sequential CNN, Attention CNN, CCT, and ViT Models
The key hyperparameters used for training the custom CNN architectures are summarised in
Table 2.
A batch size of 32 was utilised during training of the custom models. This enables a sufficient estimate of the gradient for optimising the model while maximising GPU hardware utilisation by leveraging vectorised operations and parallel processing capabilities. The initial learning rate was set to 0.001, which was identified empirically to enable adequate adaptation of model weights without causing instability or fluctuation in the optimisation trajectory, which can lead to poor solutions. A weight decay of 0.001 helps regularise the model by penalising excessive growth in parameter magnitudes selected through successive experiments to balance underfitting and overfitting risks. The Adam optimiser was chosen as it adaptively sets individual adaptive learning rates for each parameter based on estimates of first- and second-order moments, making it well-suited for non-convex deep learning objectives. The training regimen spanned 150 epochs to provide adequate iterations for convergence. Early stopping was used as regularisation by monitoring validation accuracy and halting training if metrics failed to improve by at least 0.0001 in 15 successive epochs. This avoids over-optimization beyond the empirically identified peak. The final model retains the best-performing weights on the validation set for testing.
The TensorFlow library’s CosineDecay function was the learning rate scheduler to enhance optimisation and avert overfitting [
31]. The initial learning rate was set at 0.001, gradually decreasing over small steps during training. This strategy ensured swift convergence by commencing with a higher learning rate, progressively fine-tuning the model.
3.4.2. Pre-trained ViT Model
As highlighted in
Table 3, an Adam optimiser was utilised for the pre-trained model with a learning rate of 0.001, betas ranging from 0.9 to 0.999, and a batch size of 16. The weight decay parameter was set at 0.1. Additionally, the ReduceLROnPlateau technique from PyTorch was incorporated, dynamically adjusting the learning rate when the validation loss failed to decrease. Except for ReduceLROnPlateau, all the pre-trained model parameters were taken from their original paper [
14].
Through these designated hyperparameters and training setups, we ensured effective training of BoltVision with both custom and pre-trained models. The key hyperparameters used for training the models are standardised as per
Table 2 and
Table 3, ensuring parity. All models undergo multiple restarts, with the best validation accuracy run selected for testing to mitigate optimisation disparity. Identical train-validation-test splits enable fair benchmarking.
3.5. Data Partition
In order to facilitate the robust training of our models, it was imperative to partition our dataset into three distinct subsets systematically: training, validation, and testing. Our initial allocation reserved 80% of the dataset for training purposes, with the remaining 20% earmarked exclusively for model testing. However, recognising the importance of optimising model accuracy and mitigating the risk of overfitting, a further subdivision was undertaken within the training set. Expressly, 20% of the training images were meticulously set aside for the validation set, while the remaining 80% constituted the primary subset for actual model training. This meticulous partitioning strategy ensured the highest achievable accuracy during the model development phase and played a pivotal role in averting overfitting risks. The validation set, distinct from the training set, functioned as a crucial monitoring tool, allowing for the continuous evaluation of model performance and facilitating adjustments in the training process.
Table 4 displays the number of images per section after the procedure.
Notably, this meticulous data partitioning strategy was consistently applied to the custom and pre-trained models, ensuring a standardised and equitable evaluation framework for both model types.
3.6. Experiment Setup
The experiments conducted in this study leverage a laptop testbed with an AMD Ryzen 9 5900HX CPU having 16 GB DDR4 RAM. An NVIDIA GeForce RTX 3070 GPU with 8 GB GDDR6 memory is utilised to accelerate deep learning computations. Software implementations utilise the Python ecosystem, using Keras and TensorFlow [version 2.13.1] [
32] libraries for model development and PyTorch [version 2.0.1+cu118] [
33] for pre-trained architectures. Supplementary visualisation and analysis rely on Matplotlib [version 3.8.0] [
34] and Pandas [version 2.1.0] packages [
35]. This computational framework enabled rapid iteration and validation of complex CNN, ViT, and CCT model architectures, using suitable hardware resources while retaining software flexibility for customisation specific to the missing bolt classification task and dataset. The combined advantages facilitated rigorous benchmarking essential for our comparative assessment.
5. Discussion
The results obtained carry significant implications for the field of train safety inspection. The superior performance of the pre-trained vision transformer highlights its potential for immediate deployment in real-world applications. The accuracy achieved, particularly in the classification of missing bolts, suggests that leveraging pre-existing knowledge through transfer learning substantially enhances model effectiveness. These implications underscore the practical viability of implementing advanced transformer-based models for safety-critical tasks in the railway industry.
While transformer-based architectures demonstrate significant promise, deploying them for real-time safety inspection requires addressing certain limitations. For instance, the high computational requirements of large vision transformers in terms of FLOPs and latency pose a practical constraint for efficiency-critical edge devices. Additionally, overreliance on pre-trained weights could inhibit adaptability to newer inspection scenarios not covered in the original training data. There also remain open questions regarding explaining the predictions of such black-box models for trustworthiness. More concerningly, the risk of uncontrolled false negatives—though minimal, as evidenced through the accuracy metrics—can severely impact public safety if not handled judiciously. Furthermore, false positives raise maintenance overhead. Quantifying and mitigating these failure modes through explainability, uncertainty estimation, and risk-based assessment of model readiness levels remain crucial areas for future work alongside pursuing pure accuracy gains. Fine-tuning hyperparameters, exploring additional data augmentation strategies, and investigating model ensembling techniques could contribute to refining the model’s performance. Additionally, incorporating domain-specific knowledge and conducting more extensive experiments with diverse datasets could enhance the model’s adaptability to varied conditions encountered in real-world scenarios.
The outcomes of this study pave the way for several promising avenues in future research. Firstly, investigating the interpretability of transformer-based models in safety inspection tasks can contribute to building trust in model predictions. Exploring the robustness of the models under different environmental conditions, such as varying lighting and camera perspectives, remains an essential direction for ensuring reliable performance in practical settings. Furthermore, extending the research to address multi-class classification scenarios and exploring the integration of additional sensor data could broaden the applicability of the models in comprehensive safety inspection frameworks. Additionally, while this study focused specifically on missing bolt classification for train components, the transformer-based models showcase the promising potential for generalisation to other defect detection tasks across railway inspection scenarios. For instance, the visual attention mechanisms allow the models to ignore clutter and focus only on relevant regions containing the components of interest. This facilitates adaption even to new complex metallic surface types by retraining just the final classifier layers while leveraging the generalised feature representations from pre-training. The ability to classify multiple defect patterns also enables multi-category component damage detection without architectural redesign. In effect, the entire deep neural hierarchy distills a holistic understanding of the ‘anomaly’ itself. Such knowledge transfer could allow tailoring these models to detect issues like cracks, corrosion damage, faulty welds, or leaks across broader locomotive assets like axles, frames, couplers, brakes, and bogies following the reannotation of small additive datasets. In future work, we aim to empirically evaluate such adaptability to related safety-critical visual inspection categories prevalent in rail maintenance routines.
The discussion section concludes by emphasising the practical implications of the results, identifying areas for immediate improvement, and outlining potential research directions to advance the field of safety inspection for train components. The findings contribute to the current understanding of model performance and serve as a catalyst for continued exploration and innovation in this critical domain.
6. Conclusions
In conclusion, the research endeavours in the safety inspection of trains, particularly in the context of missing bolt classification, have yielded valuable insights and promising outcomes. The rigorous evaluation of diverse model architectures has illuminated the potential of transformer-based models, with the pre-trained vision transformer emerging as a standout performer, achieving an impressive accuracy of 92.86%. This success underscores the significance of leveraging transfer learning to enhance the efficiency and accuracy of safety inspection mechanisms.
The discussion of result implications emphasises the immediate applicability of advanced models in real-world scenarios, with the pre-trained vision transformer showcasing its practical viability. The discussion also recognises the scope for improvements, suggesting avenues such as hyperparameter fine-tuning and further exploration of data augmentation strategies to enhance model robustness.
Future research directions are delineated, offering a roadmap for continued exploration and innovation. Addressing interpretability challenges, assessing model robustness under diverse environmental conditions, and expanding the research to encompass multi-class classification scenarios represent pivotal areas for further investigation. Additionally, combining vision transformer ensembles or transferring intermediate representations from large-scale pre-trained models can further optimise accuracy and efficiency, which is crucial for ubiquitous edge deployment.
In summary, this research contributes to the advancement of safety inspection technologies for train components and sets the stage for future developments in the application of transformer-based models. The pre-trained vision transformer’s exceptional performance establishes a benchmark, emphasising the potential for continued advancements in the intersection of machine learning and railway safety. As deep learning technology continues to evolve [
36], these findings are poised to catalyse further research and foster the implementation of efficient and reliable safety inspection mechanisms in the railway industry. This research can also be used as a springboard for other domains where lightweight, non-invasive detection is required, such as manufacturing [
37] and education [
38]. As vision-based AI technology continues to progress rapidly across applications like civil infrastructure monitoring [
39,
40], the findings from comparative assessment of models like BoltVision will help guide similar safety-critical adoption in the railway industry. By benchmarking diverse deep learning approaches and demonstrating state-of-the-art transformer architectures, this work delivers practical insights into pursuing further accuracy and efficiency gains. Specifically, exploring multi-modal sensor fusion, uncertainty quantification, dataset expansion through railway image synthesis, and optimised edge deployment present promising areas for subsequent investigation. We hope the BoltVision evaluations and discussions of real-world viability will catalyse greater integration of automated, non-invasive inspection to enrich reliability across large-scale transportation systems.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}