
Multivariable Linear Position Control Based on Active Disturbance Rejection for Two Linear Slides Coupled to a Mass
 , , ,
, , , 
Abstract
:1. Introduction
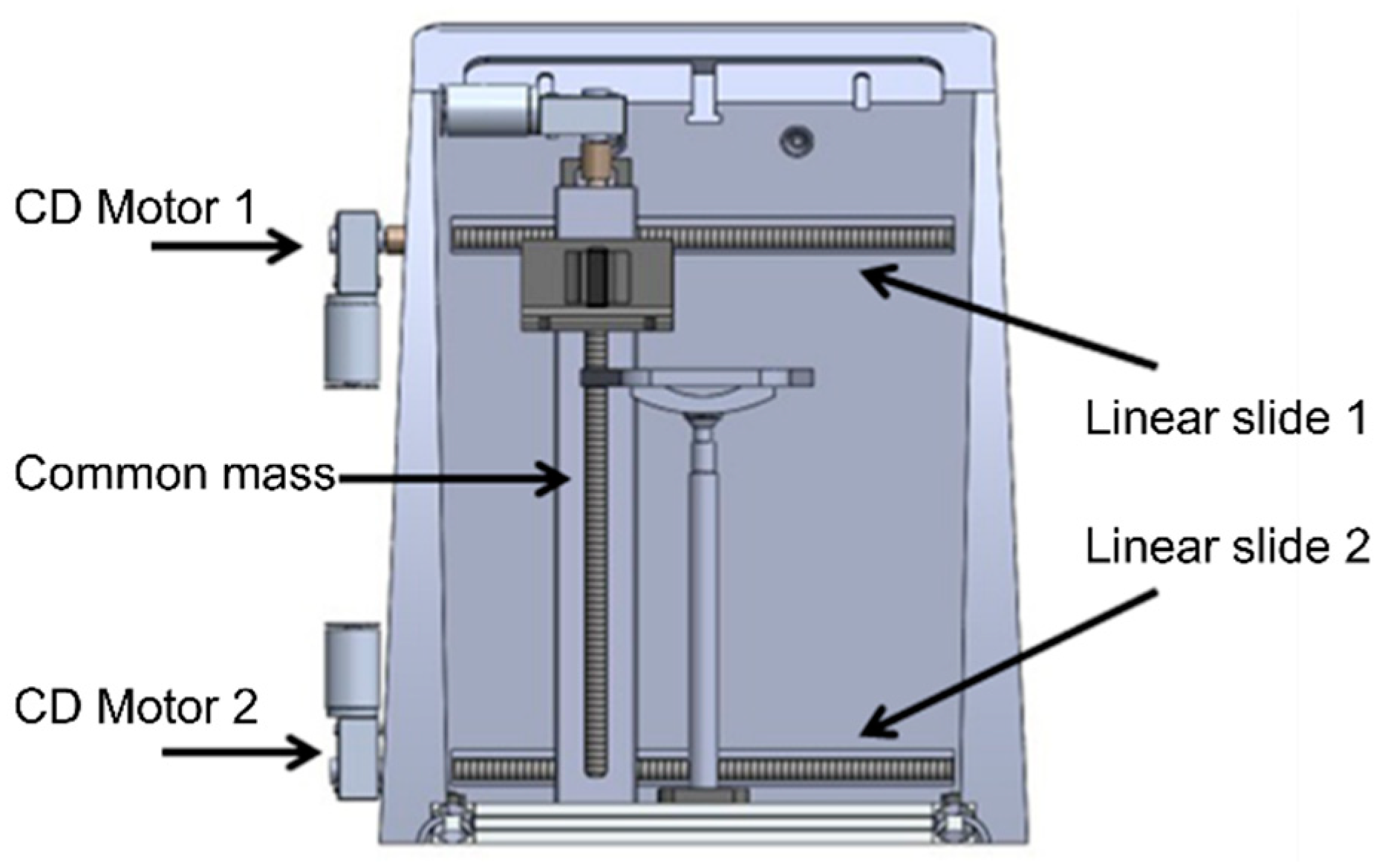
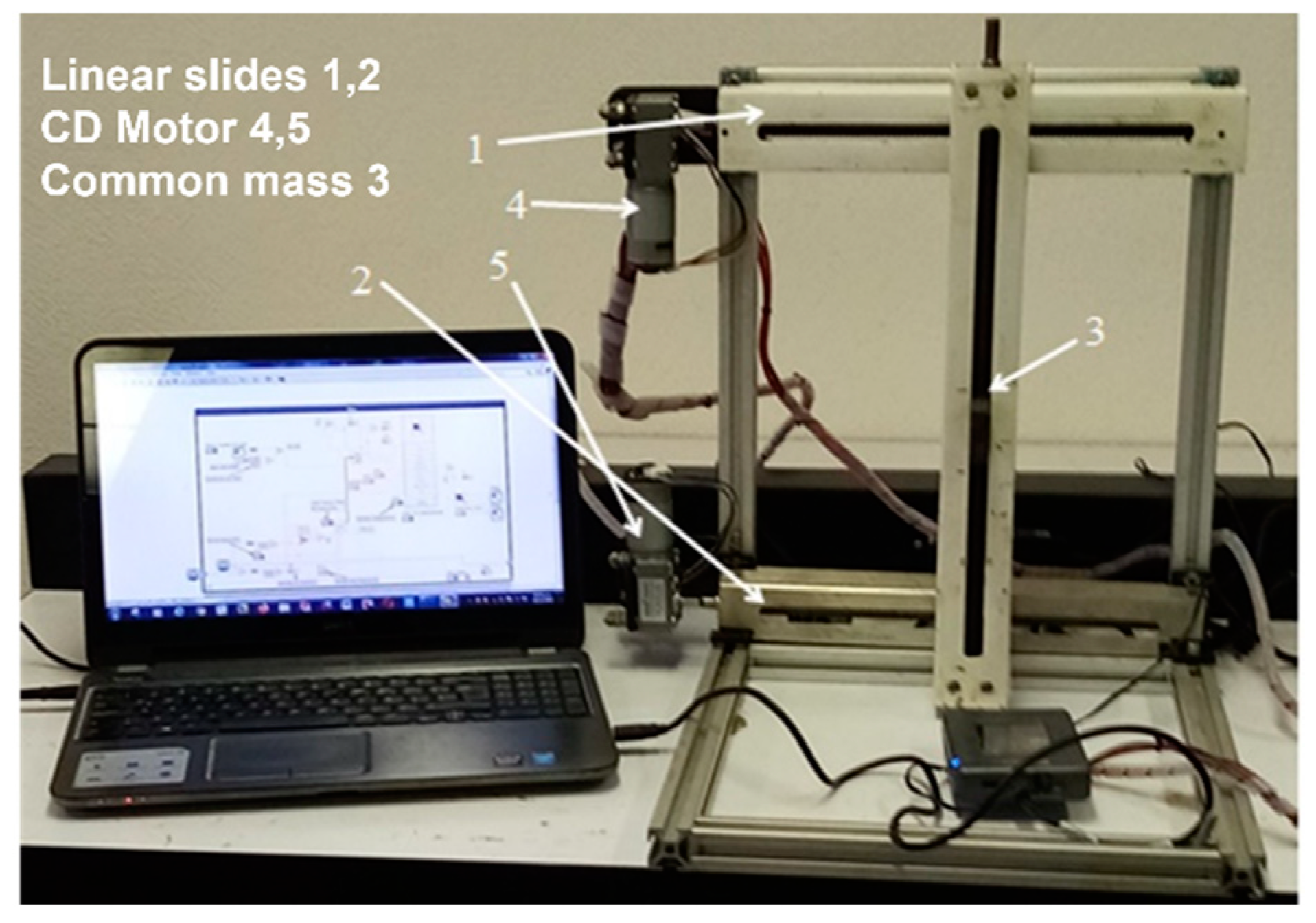
2. Materials and Methods
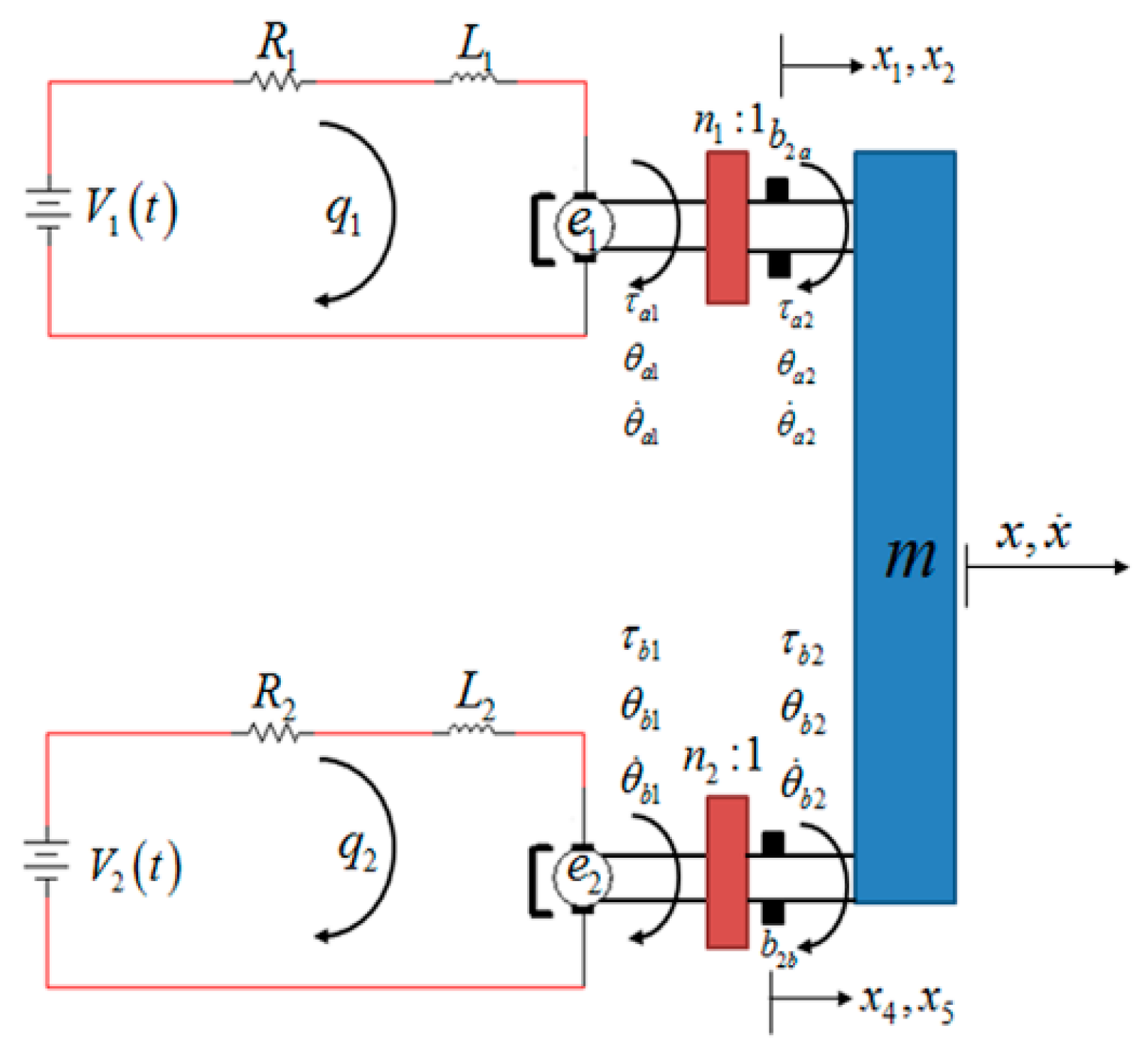
2.1. Mathematical Model
2.2. Differential Parameterization of the Dynamic Model
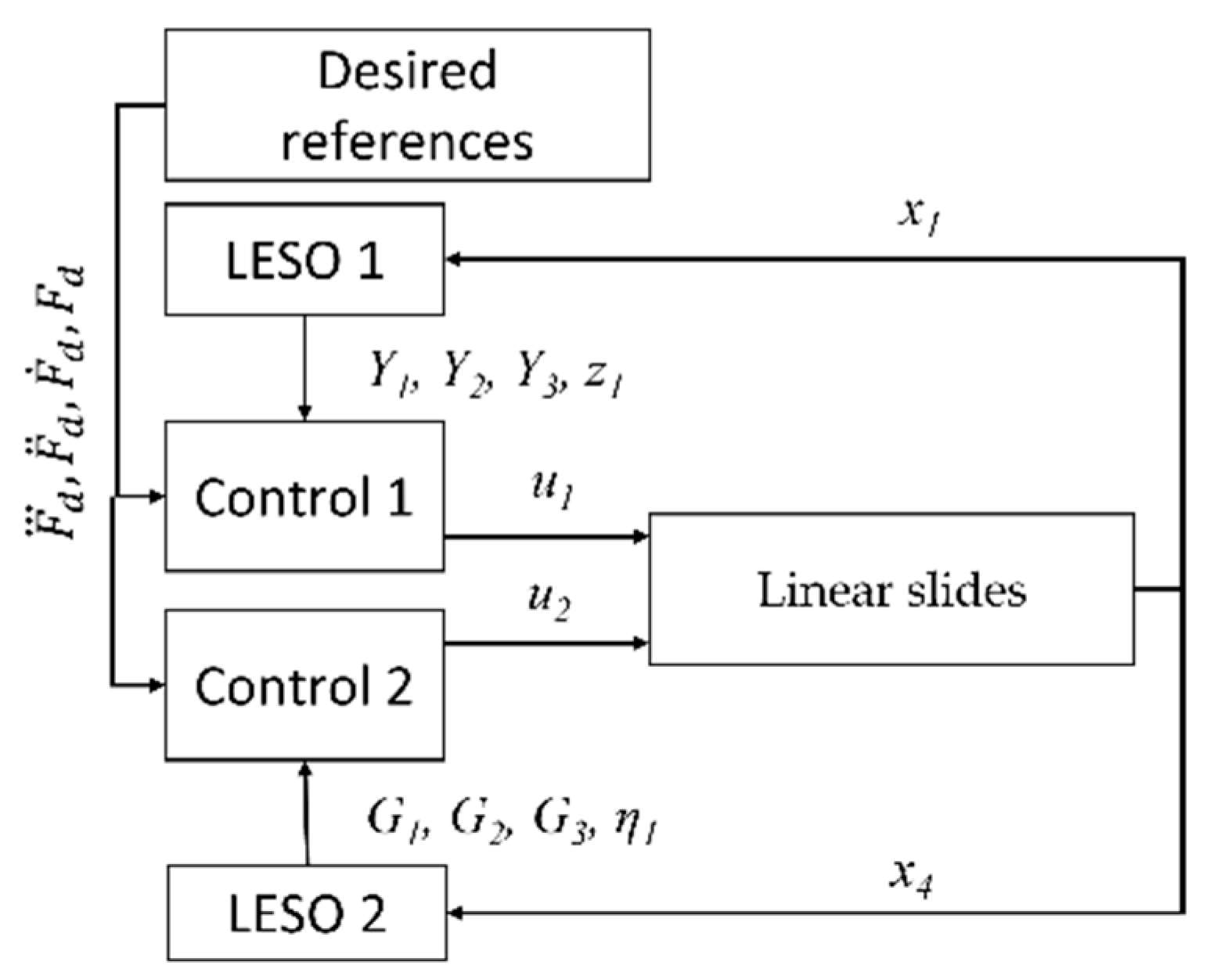
2.3. Active Disturbance Rejection Control (ADRC)
- The flat outputs and are measured;
- The nominal values of the system parameters are known;
- The control inputs are and are available;
- The disturbance functions and are unknown but considered as bounded;
- The estimated variables of the disturbance functions will be denoted as and .
2.4. Desired Reference Trajectory
2.5. System Stability Analysis ESO-ADRC
3. Results
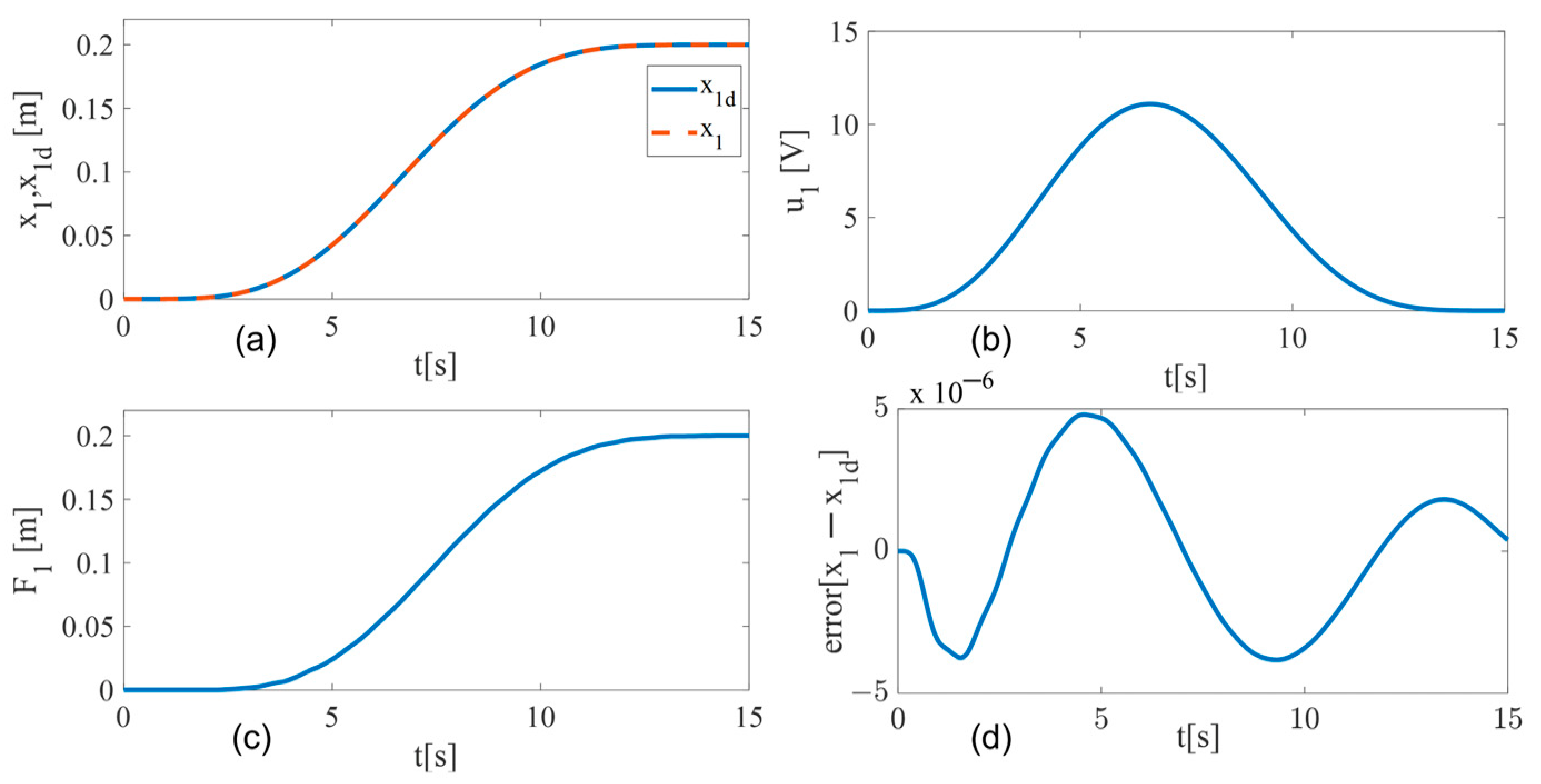
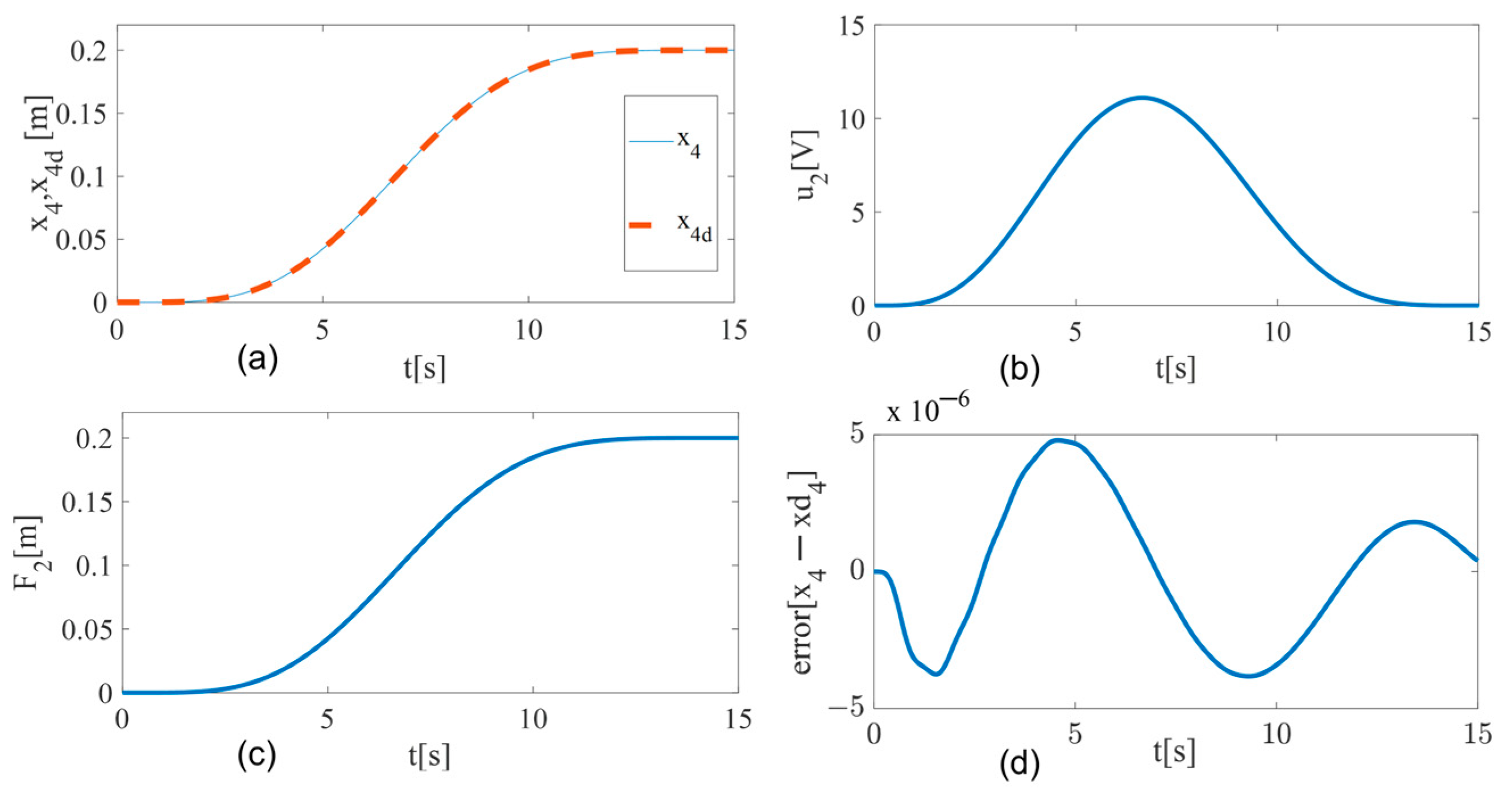
3.1. Simulation Results
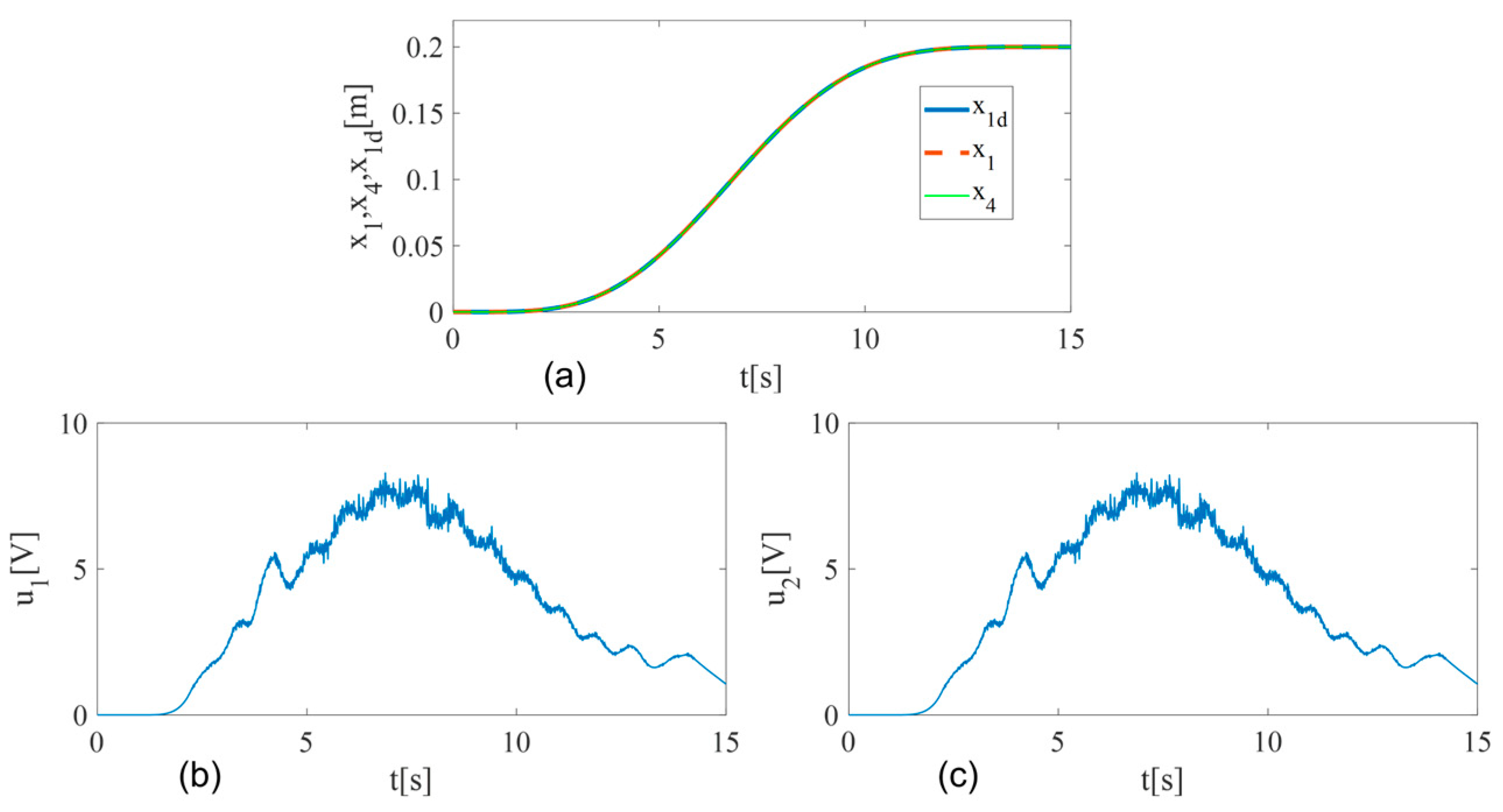
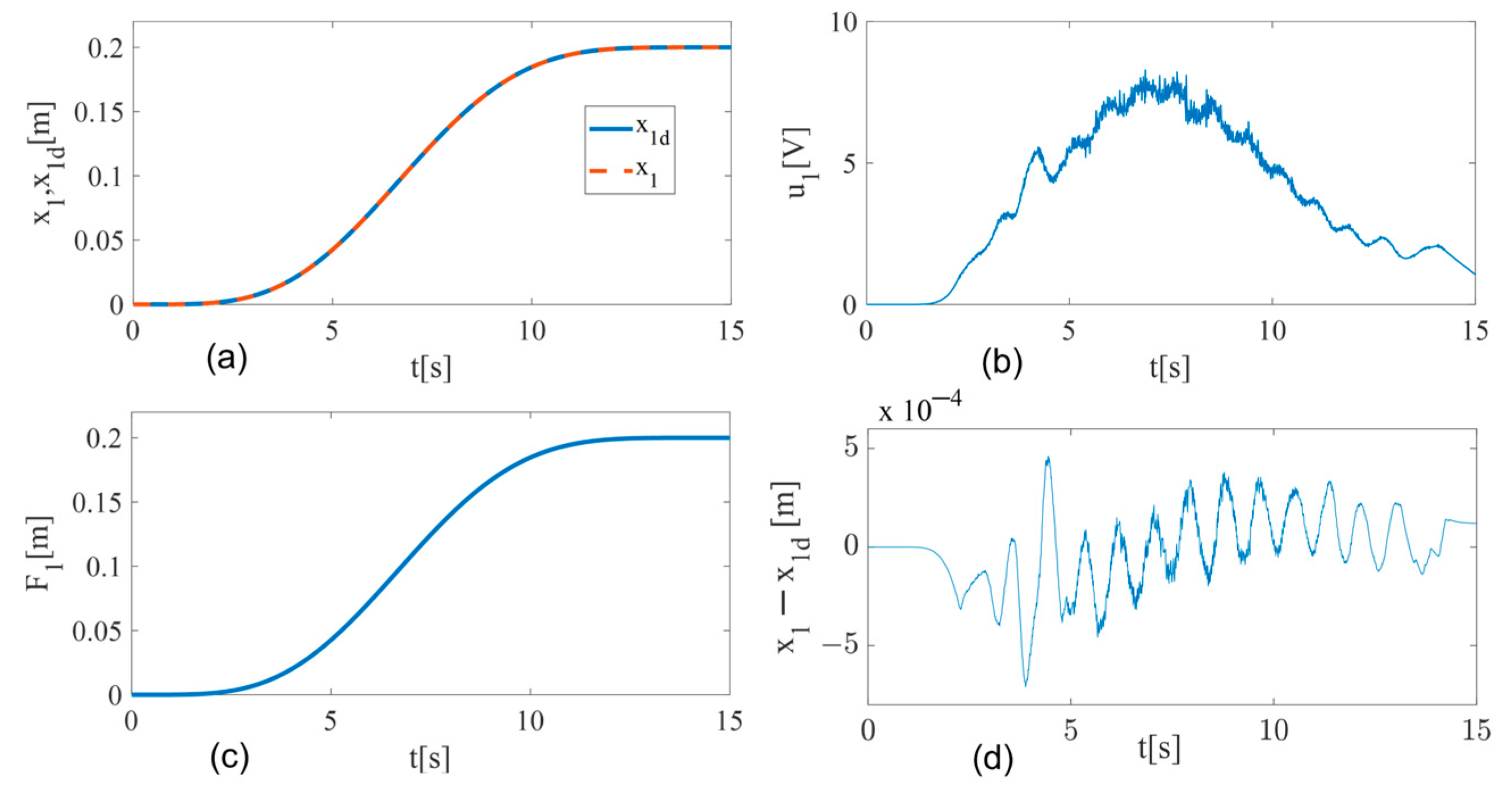
3.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Linares-Flores, J.; Reger, J.; Sira-Ramírez, H. Sensorless tracking control of two DC-drives via a double Buck-converter. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006. [Google Scholar]
- Sira-Ramírez, H.; Linares-Flores, J.; García-Rodríguez, C.; Contreras-Ordaz, M.A. On the control of the permanent magnet synchronous motor: An active disturbance rejection control approach. IEEE Trans. Control. Syst. Technol. 2014, 22, 2056–2063. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Guerrero-Castellanos, J.F.; Lescas-Hernández, R.; Hernández-Méndez, A.; Vázquez-Perales, R. Angular speed control of an induction motor via a solar powered boost converter-voltage source inverter combination. Energy 2019, 166, 326–334. [Google Scholar] [CrossRef]
- Sira-Ramırez, H.; Linares-Flores, J.; Luviano-Juarez, A.; Cortes-Romero, J. Ultramodelos Globales y el Control por Rechazo Activo de Perturbaciones en Sistemas No lineales Diferencialmente Planos. Rev. Iberoam. Autom. Inform. Ind. 2015, 12, 133–144. [Google Scholar] [CrossRef]
- Ramírez-Neria, M.; Sira-Ramírez, H.; Garrido-Moctezuma, R.; Luviano-Juarez, A. Linear active disturbance rejection control of underactuated systems: The case of the Furuta pendulum. ISA Trans. 2014, 53, 920–928. [Google Scholar] [CrossRef] [PubMed]
- Guerrero-Ramírez, E.; Martínez-Barbosa, A.; Guzmán-Ramírez, E.; Linares-Flores, J.; Sira-Ramírez, H. Control del Convertidor CD/CD Reductor–Paralelo Implementado en FPGA. Rev. Iberoam. Autom. Inform. Ind. 2018, 15, 309–316. [Google Scholar] [CrossRef]
- Tian, L.; Li, D.; Huang, C.E. Decentralized controller design based on 3-order active-disturbance-rejection-control. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; pp. 2746–2751. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Luviano-Juarez, A.; Cortes-Romero, J. Control lineal robusto de sistemas no lineales diferencialmente planos. Rev. Iberoam. Autom. Inform. Ind. 2011, 8, 14–28. [Google Scholar] [CrossRef]
- Sun, L.; Dong, J.; Li, D.; Lee, K.Y. A practical multivariable control approach based on inverted decoupling and decentralized active disturbance rejection control. Ind. Eng. Chem. Res. 2016, 55, 2008–2019. [Google Scholar] [CrossRef]
- Chang, X.; Li, Y.; Zhang, W.; Wang, N.; Xue, W. Active disturbance rejection control for a flywheel energy storage system. IEEE Trans. Ind. Electron. 2014, 62, 991–1001. [Google Scholar] [CrossRef]
- Xia, Y.; Chen, R.; Pu, F.; Dai, L. Active disturbance rejection control for drag tracking in mars entry guidance. Adv. Space Res. 2013, 53, 853–861. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; Rosales-Díaz, D. Decentralized active disturbance rejection control of power converters serving a time varying load. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 22–24 May 2014; pp. 4348–4353. [Google Scholar] [CrossRef]
- Ramírez-Neria, M.; Madonski, R.; Luviano-Juárez, A.; Gao, Z.; Sira-Ramírez, H. Design of ADRC for Second-Order Mechanical Systems without Time-Derivatives in the Tracking Controller. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 2623–2628. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Hernández-Méndez, A.; Guerrero-Castellanos, J.F.; Mino-Aguilar, G.; Espinosa-Maya, E.; Zurita-Bustamante, E.W. Decentralized ADR angular speed control for load sharing in servomechanisms. In Proceedings of the 2018 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 22–23 February 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Sun, L.; Li, D.; Hu, K.; Lee, K.Y.; Pan, F. On tuning and practical implementation of active disturbance rejection controller: A case study from a regenerative heater in a 1000 MW power plant. Ind. Eng. Chem. Res. 2016, 55, 6686–6695. [Google Scholar] [CrossRef]
- Barahona, J.L.; Juárez, J.A.; Galván, G.S.; Linares, J. Active disturbance rejection control of temperature of thermoelectric module. Rev. Iberoam. Autom. Inform. Ind. 2022, 19, 48–60. [Google Scholar] [CrossRef]
- Pulido-Flores, A.; Guerrero-Castellanos, J.F.; Linares-Flores, J.; Maya-Rueda, S.E.; Alvarez-Muñoz, J.U.; Escareno, J.; Mino-Aguilar, G. Active Disturbance Rejection Control for Attitude Stabilization of Multi-rotors UAVs with bounded inputs. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; p. 1181. [Google Scholar] [CrossRef]
- Guerrero-Castellanos, J.F.; Durand, S.; Muñoz-Hernández, G.A.; Marchand, N.; Romeo, L.L.G.; Linares-Flores, J.; Miño-Aguilar, G.; Guerrero-Sánchez, W.F. Bounded Attitude Control with Active Disturbance Rejection Capabilities for Multirotor UAVs. Appl. Sci. 2021, 11, 5960. [Google Scholar] [CrossRef]
- Xue, W.; Huang, Y. The active disturbance rejection control for a class of MIMO block lower-triangular system. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 6362–6367. [Google Scholar]
- Blanco Ortega, A.; Magadán Salazar, A.; Guzmán Valdivia, C.H.; Gómez Becerra, F.A.; Palacios Gallegos, M.J.; García Velarde, M.A.; Santana Camilo, J.A. CNC Machines for Rehabilitation: Ankle and Shoulder. Machines 2022, 10, 1055. [Google Scholar] [CrossRef]
- Gómez Becerra, F.A.; Olivares Peregrino, V.H.; Blanco Ortega, A.; Linares Flores, J. Optimal controller and controller based on differential flatness in a linear guide system: A performance comparison of indexes. Math. Probl. Eng. 2015, 2015, 589184. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; Agrawal, S. Differentially Flat Systems; Marcel Dekker: New York, NY, USA; Basel, Switzerland, 2004. [Google Scholar]
- Sira-Ramírez, H. From flatness, GPI observers, GPI control and flat filters to observer-based ADRC. Control. Theory Technol. 2018, 16, 249–260. [Google Scholar] [CrossRef]
- Shi, S.; Zeng, Z.; Zhao, C.; Guo, L.; Chen, P. Improved Active Disturbance Rejection Control (ADRC) with Extended State Filters. Energies 2022, 15, 5799. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Description |
|---|---|---|
| - | Mass displacement | |
| 10 kg | Mass | |
| 0.008 m | Screw pitch | |
| (q) | - | Motor electrical current |
| 0.00706 Nm/A | Motor torque coefficient | |
| 0.00979 Vs/rad | Motor electrical coefficient | |
| 0.2 Ns/m | Viscous damping coefficient | |
| 0.00058 H | Armature inductance | |
| 2.4 Ω | Armature resistance | |
| V | Voltage | |
| 0.027 | Speed ratio | |
| kg m2 | Inertia moment |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gómez Becerra, F.A.; Villanueva Tavira, J.; Buenabad Arias, H.M.; Blanco Ortega, A.; Sarmiento Bustos, E.; Calixto Rodríguez, M.; Valdez Martinez, J.S. Multivariable Linear Position Control Based on Active Disturbance Rejection for Two Linear Slides Coupled to a Mass. Machines 2023, 11, 889. https://doi.org/10.3390/machines11090889
Gómez Becerra FA, Villanueva Tavira J, Buenabad Arias HM, Blanco Ortega A, Sarmiento Bustos E, Calixto Rodríguez M, Valdez Martinez JS. Multivariable Linear Position Control Based on Active Disturbance Rejection for Two Linear Slides Coupled to a Mass. Machines. 2023; 11(9):889. https://doi.org/10.3390/machines11090889
Chicago/Turabian StyleGómez Becerra, Fabio Abel, Jonathan Villanueva Tavira, Héctor Miguel Buenabad Arias, Andrés Blanco Ortega, Estela Sarmiento Bustos, Manuela Calixto Rodríguez, and Jorge Salvador Valdez Martinez. 2023. "Multivariable Linear Position Control Based on Active Disturbance Rejection for Two Linear Slides Coupled to a Mass" Machines 11, no. 9: 889. https://doi.org/10.3390/machines11090889