
Prediction of Stress and Deformation Caused by Magnetic Attraction Force in Modulation Elements in a Magnetically Geared Machine Using Subdomain Modeling

 , , ,
, , ,  , , , and
, , , and
Abstract
:1. Introduction
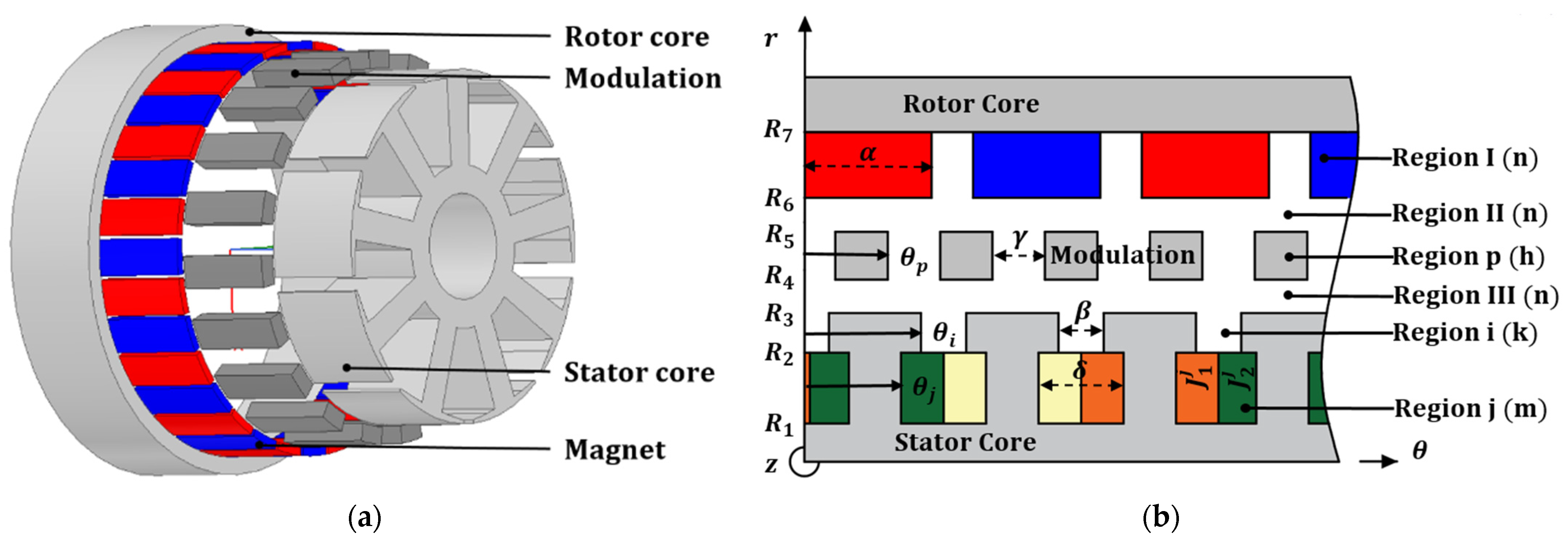
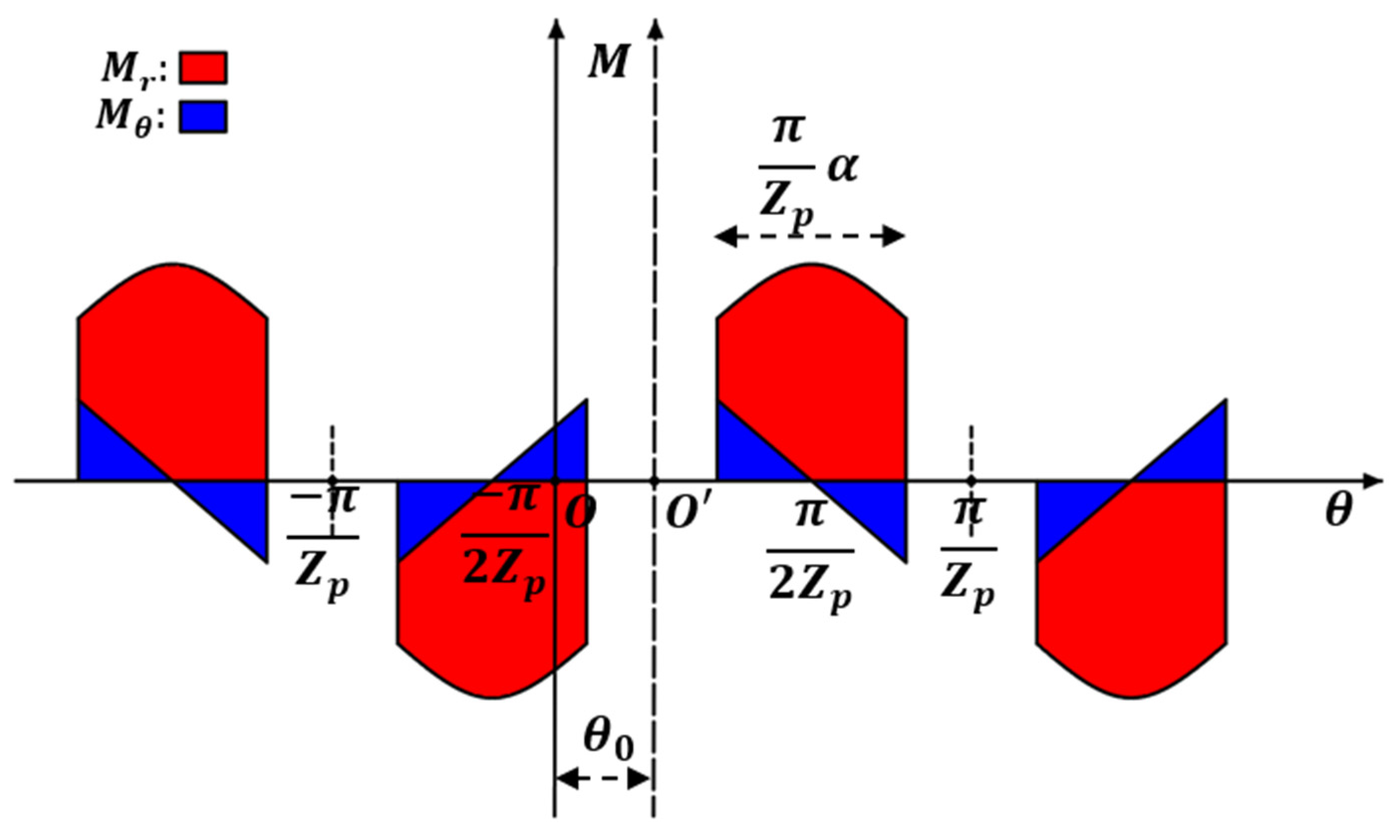
2. Magnetic Attraction Force
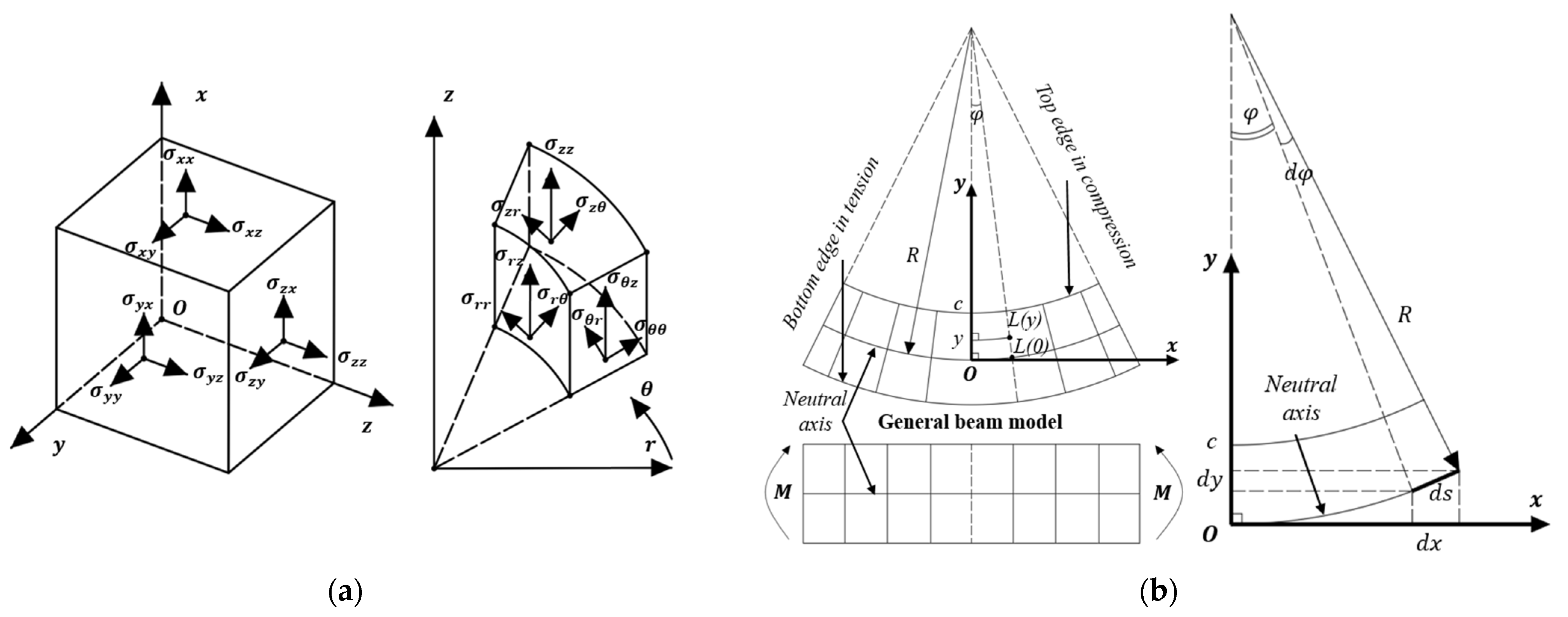
2.1. Governing Partial Differential Equations (PDEs)
- The end effects are ignored;
- The problem is two-dimensional in Cartesian coordinates;
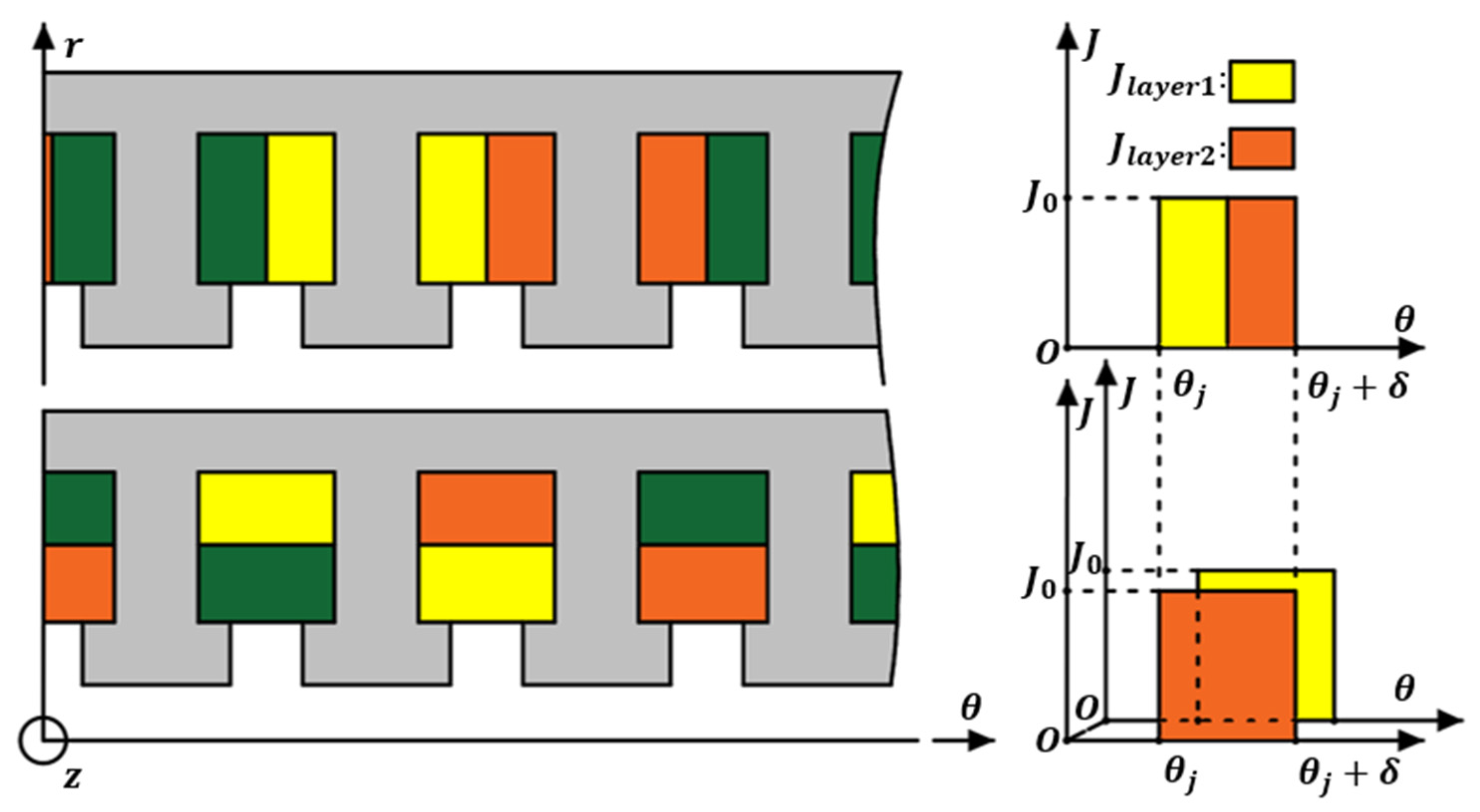
- Magnetic vector potential A, current density J, magnetization vector M, and magnetic flux density vector B, have the following non-zero components, respectively: A = [0, 0, Az]; J = [0, 0, Jz]; M = [Mr, Mθ, 0]; B = [ Br, Bθ, 0];
- The core materials have infinite permeability;
- The shaft is a non-magnetic material.
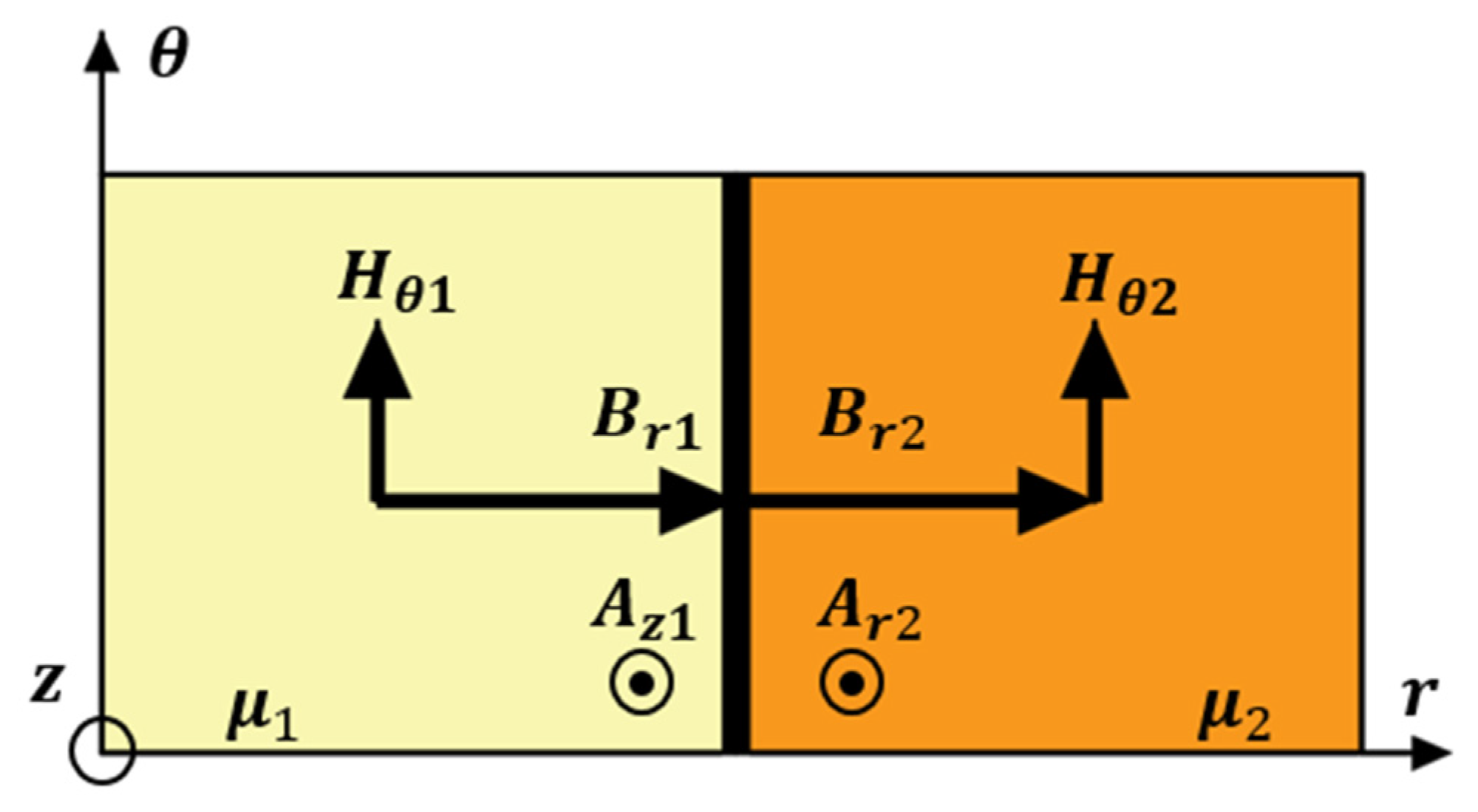
2.2. Boundary Conditions Principle
2.3. The Maxwell Stress Tensor
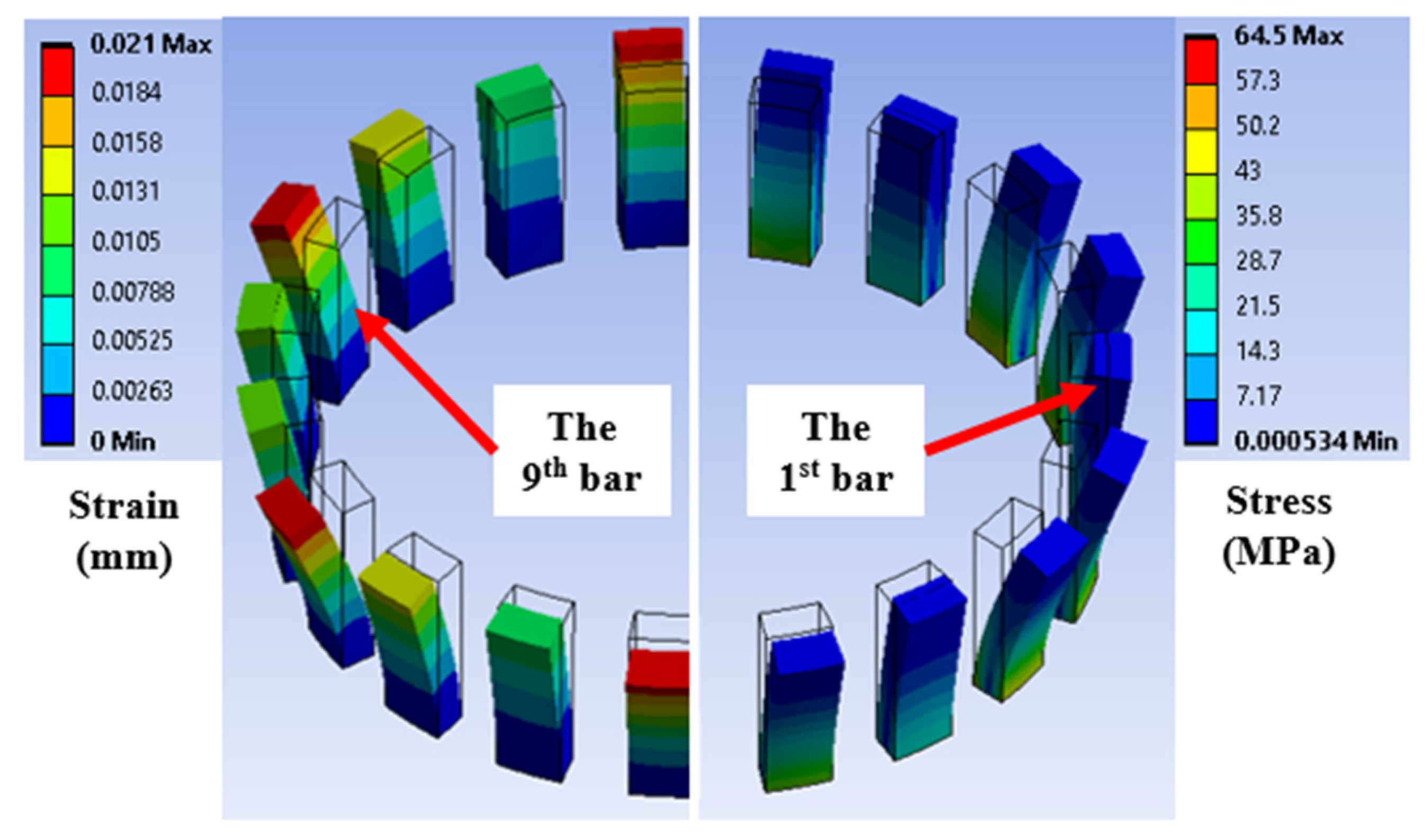
3. Stress and Deformation Analysis in Modulation
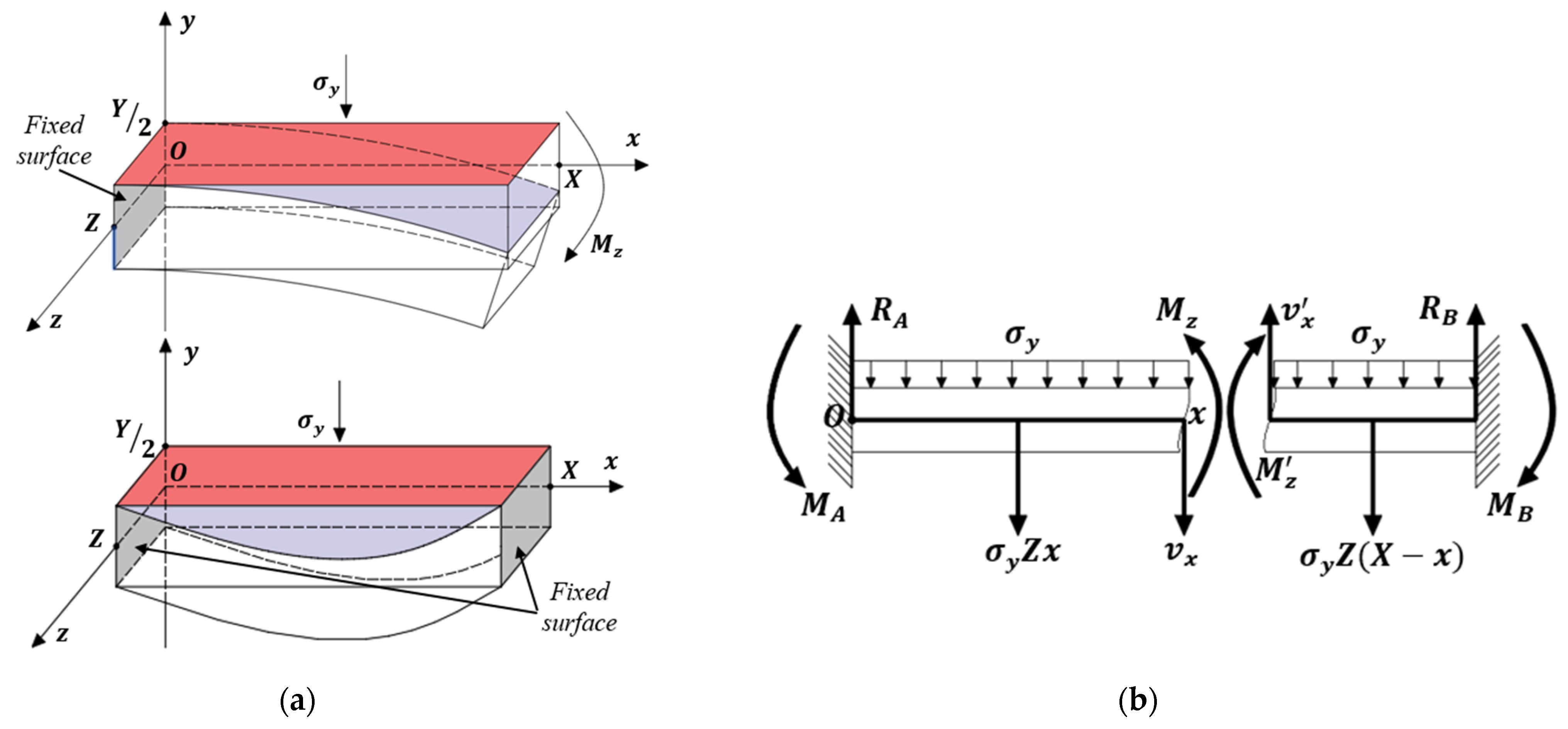
3.1. Timoshenko Beam Model
- The coordinate is converted into ;
- The cross section and material properties of the beam are constant along the length;
- There is a symmetrical cross-section about x-y plane;
- The height, width, and length of a converted bar are denoted as X, Y, and Z.
3.2. Modulation Fixed at One End
3.3. Modulation Fixed at Both Ends
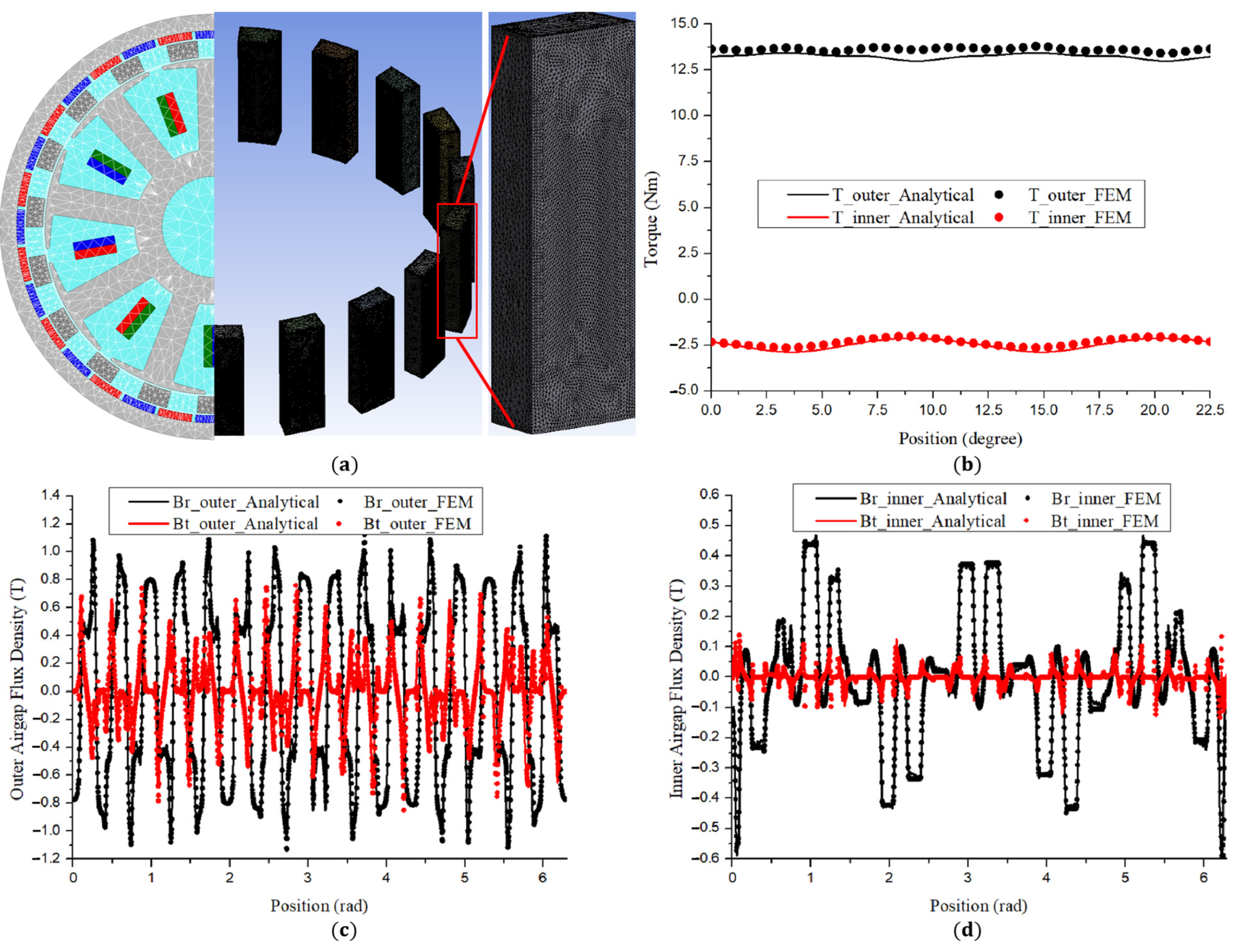
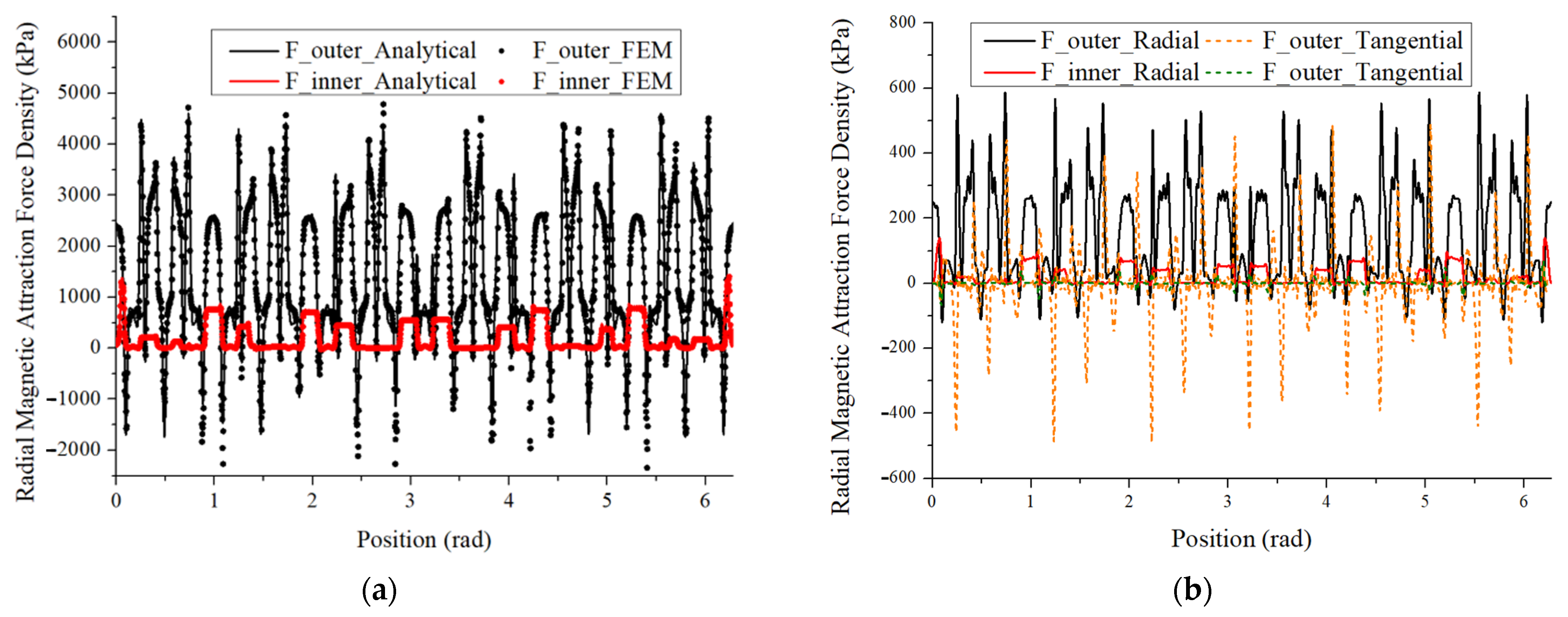
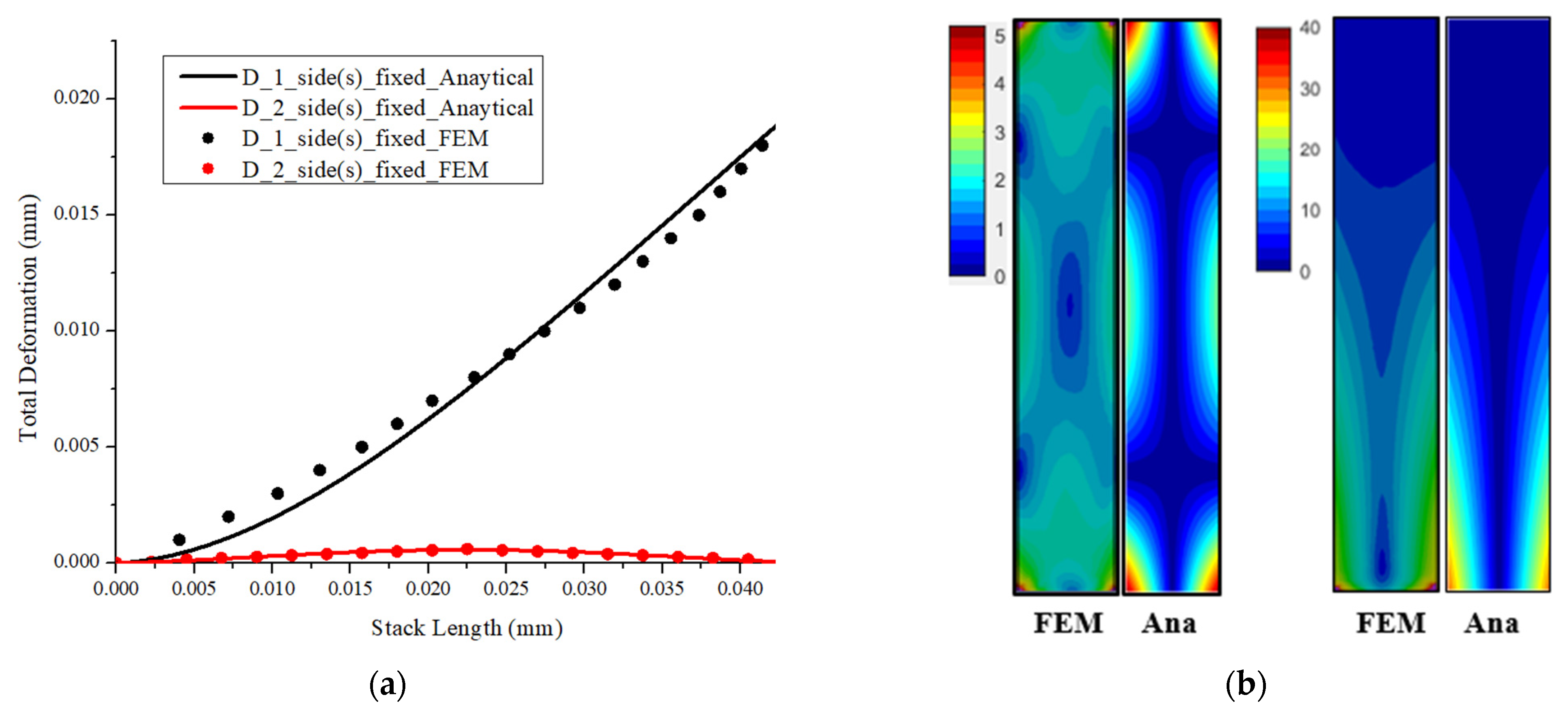
4. Results and Discussion
5. Conclusions
- Consider the non-linear characteristic of magnetic material;
- Consider the skin effect for the solid modulation;
- The influence of the on-load or unbalanced load should be ideal;
- Verify the subdomain method with the test bench’s results;
- Develop a mathematical method for a lamination-structured modulation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Wang, Q.; Zhao, X.; Niu, S. Flux-Modulated Permanent Magnet Machines: Challenges and Opportunities. World Electr. Veh. J. 2021, 12, 13. [Google Scholar] [CrossRef]
- Padinharu, D.K.K. Permanent Magnet Vernier Machines for Direct-Drive Offshore Wind Power: Benefits and Challenges. IEEE Access 2022, 10, 20652–20668. [Google Scholar] [CrossRef]
- Zhu, Z.Q. Overview of novel magnetically geared machines with partitioned stators. IET Electr. Power Appl. 2018, 12, 595–604. [Google Scholar] [CrossRef]
- Wang, L.L.; Shen, J.X.; Luk, P.C.K.; Fei, W.Z.; Wang, C.F.; Hao, H. Development of a Magnetic-Geared Permanent-Magnet Brushless Motor. IEEE Trans. Magn. 2009, 45, 4578–4581. [Google Scholar] [CrossRef]
- Niu, S.; Ho, S.L.; Fu, W.N. A Novel Direct-Drive Dual-Structure Permanent Magnet Machine. IEEE Trans. Magn. 2010, 46, 2036–2039. [Google Scholar] [CrossRef]
- Jian, L.; Xu, G.; Mi, C.C.; Chau, K.T.; Chan, C.C. Analytical Method for Magnetic Field Calculation in a Low-Speed Permanent-Magnet Harmonic Machine. IEEE Trans. Energy Convers 2011, 26, 862–870. [Google Scholar] [CrossRef]
- Gerber, S.; Wang, R.J. Design and Evaluation of a Magnetically Geared PM Machine. IEEE Trans. Magn. 2015, 51, 8107010. [Google Scholar] [CrossRef]
- Fu, W.N.; Ho, S.L. A Quantitative Comparative Analysis of a Novel Flux-Modulated Permanent-Magnet Motor for Low-Speed Drive. IEEE Trans. Magn. 2010, 46, 127–134. [Google Scholar] [CrossRef]
- Jing, L.; Tang, W.; Wang, T.; Ben, T.; Qu, R. Performance Analysis of Magnetically Geared Permanent Magnet Brushless Motor for Hybrid Electric Vehicles. IEEE Trans. Transp. 2022, 8, 2874–2883. [Google Scholar] [CrossRef]
- Jing, L.; Pan, Y.; Wang, T.; Qu, R.; Cheng, P.T. Transient Analysis and Verification of a Magnetic Gear Integrated Permanent Magnet Brushless Machine With Halbach Arrays. IEEE Trans. Emerg. Sel. Topics Power Electron. 2022, 10, 1881–1890. [Google Scholar] [CrossRef]
- Jing, L.; Tang, W.; Liu, W.; Rao, Y.; Tan, C.; Qu, R. A Double-Stator Single-Rotor Magnetic Field Modulated Motor with HTS Bulks. IEEE Trans. Appl. Supercond. 2022, 32, 5201105. [Google Scholar] [CrossRef]
- Atallah, K.; Rens, J.; Mezani, S.; Howe, D. A Novel “Pseudo” Direct-Drive Brushless Permanent Magnet Machine. IEEE Trans. Magn. 2008, 44, 4349–4352. [Google Scholar] [CrossRef]
- Okada, K.; Niguchi, N.; Hirata, K. Analysis of a Vernier Motor with Concentrated Windings. IEEE Trans. Magn. 2013, 49, 2241–2244. [Google Scholar] [CrossRef]
- Liu, W.; Thomas, A.L. Analysis of Consequent Pole Spoke Type Vernier Permanent Magnet Machine with Alternating Flux Barrier Design. IEEE Trans. Ind. Appl. 2018, 54, 5918–5929. [Google Scholar] [CrossRef]
- Li, D.; Ronghai, Q.; Thomas, A.L. High-Power-Factor Vernier Permanent-Magnet Machines. IEEE Trans. Ind. Appl. 2014, 50, 3664–3674. [Google Scholar] [CrossRef]
- Li, D.; Qu, R.; Li, J.; Xiao, L.; Wu, L.; Xu, W. Analysis of Torque Capability and Quality in Vernier Permanent-Magnet Machines. IEEE Trans. Ind. Appl. 2016, 52, 125–135. [Google Scholar] [CrossRef]
- Jing, L.; Gong, J.; Huang, Z.; Ben, T.; Huang, Y. A New Structure for the Magnetic Gear. IEEE Access 2019, 7, 75550–75555. [Google Scholar] [CrossRef]
- Jing, L.; Huang, Z.; Chen, J.; Qu, R. Design, Analysis, and Realization of a Hybrid-Excited Magnetic Gear During Overload. IEEE Trans. Ind. Appl. 2020, 56, 4812–4819. [Google Scholar] [CrossRef]
- Ling, Z.; Zhao, W.; Ji, J.; Xu, M. Design and Analysis of a Magnetic Field Screw Based on 3-D Magnetic Field Modulation Theory. IEEE Trans. Energy Convers. 2022, 37, 2620–2628. [Google Scholar] [CrossRef]
- Jing, L.; Liu, W.; Tang, W.; Qu, R. Design and Optimization of Coaxial Magnetic Gear With Double-Layer PMs and Spoke Structure for Tidal Power Generation. IEEE ASME Trans. Mechatron. 2023. [Google Scholar] [CrossRef]
- Jing, L.; Wang, T.; Tang, W.; Liu, W.; Qu, R. Characteristic Analysis of the Magnetic Variable Speed Diesel–Electric Hybrid Motor with Auxiliary Teeth for Ship Propulsion. IEEE ASME Trans Mechatron 2023. [Google Scholar] [CrossRef]
- Liu, Y.; Fu, W.N.; Ho, S.L.; Niu, S.; Ching, T.W. Electromagnetic Performance Analysis of Novel HTS Doubly Fed Flux-Modulated Machines. IEEE Trans. Appl. Supercond. 2015, 25, 5203204. [Google Scholar] [CrossRef]
- Wang, Q.; Niu, S.; Yang, S. Design Optimization and Comparative Study of Novel Magnetic-Geared Permanent Magnet Machines. IEEE Trans. Magn. 2017, 53, 8104204. [Google Scholar] [CrossRef]
- Wang, Y.; Niu, S.; Fu, W. Sensitivity Analysis and Optimal Design of a Dual Mechanical Port Bidirectional Flux-Modulated Machine. IEEE Ind. Electron. 2018, 65, 211–220. [Google Scholar] [CrossRef]
- Yousefnejad, S.; Heydari, H.; Akatsu, K.; Ro, J.S. Analysis and Design of Novel Structured High Torque Density Magnetic-Geared Permanent Magnet Machine. IEEE Access 2021, 9, 64574–64586. [Google Scholar] [CrossRef]
- Niu, S.; Sheng, T.; Zhao, X.; Zhang, X.D. Operation Principle and Torque Component Quantification of Short-Pitched Flux-Bidirectional-Modulation Machine. IEEE Access 2019, 7, 136676–136685. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, Z.Q. Influence of Gear Ratio on the Performance of Fractional Slot Concentrated Winding Permanent Magnet Machines. IEEE Ind. Electron. 2019, 66, 7593–7602. [Google Scholar] [CrossRef]
- Jing, L.; Liu, L.; Xiong, M.; Feng, D. Parameters Analysis and Optimization Design for a Concentric Magnetic Gear Based on Sinusoidal Magnetizations. IEEE Trans. Appl. Supercond. 2014, 24, 0600905. [Google Scholar]
- Jing, L.; Su, Z.; Wang, T.; Wang, Y.; Qu, R. Multi-Objective Optimization Analysis of Magnetic Gear with HTS Bulks and Uneven Halbach Arrays. IEEE Trans. Appl. Supercond. 2023, 33, 5202705. [Google Scholar] [CrossRef]
- Wang, Y.; Jing, L. A Novel Eccentric Harmonic Magnetic Gear with Inhomogeneous Structure and Halbach Array. In Proceedings of the 2022 IEEE 3rd China International Youth Conference on Electrical Engineering (CIYCEE), Wuhan, China, 3–5 November 2022; pp. 1–6. [Google Scholar]
- Lee, J.I.; Shin, K.H.; Bang, T.K.; Ryu, D.W.; Kim, K.H.; Hong, K.; Choi, J.Y. Design and Analysis of the Coaxial Magnetic Gear Considering the Electromagnetic Performance and Mechanical Stress. IEEE Trans. Appl. Supercond. 2020, 30, 3700105. [Google Scholar] [CrossRef]
- Modaresahmadi, S.; Barnett, D.; Baninajar, H.; Bird, J.Z.; Williams, W.B. Structural modeling and validation of laminated stacks in magnetic gearing applications. Int. J. Mech. Sci. 2021, 192, 106133. [Google Scholar] [CrossRef]
- Devillers, E.; Besnerais, J.L.; Lubin, T.; Hecquet, M.; Lecointe, J.P. A review of subdomain modeling techniques in electrical machines: Performances and applications. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016. [Google Scholar]
- Zhu, Z.Q.; Howe, D. Instantaneous magnetic field distribution in brushless permanent magnet DC motors. III. Effect of stator slotting. IEEE Trans. Magn. 1993, 29, 143–151. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. 2-D Exact Analytical Model for Surface-Mounted Permanent-Magnet Motors with Semi-Closed Slots. IEEE Trans. Magn. 2011, 47, 479–492. [Google Scholar] [CrossRef]
- Shen, Y.; Zhu, Z.Q. General analytical model for calculating electromagnetic performance of permanent magnet brushless machines having segmented Halbach array. IET Electr. Syst. Transp. 2013, 3, 57–66. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. Analytical Computation of the Magnetic Field Distribution in a Magnetic Gear. IEEE Trans. Magn. 2010, 46, 2611–2621. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. Development of a 2-D Analytical Model for the Electromagnetic Computation of Axial-Field Magnetic Gears. IEEE Trans. Magn. 2013, 49, 5507–5521. [Google Scholar] [CrossRef]
- Jing, L.; Gong, J.; Ben, T. Analytical Method for Magnetic Field of Eccentric Magnetic Harmonic Gear. IEEE Access 2020, 8, 34236–34245. [Google Scholar] [CrossRef]
- Dubas, F.; Boughrara, K. New Scientific Contribution on the 2-D Subdomain Technique in Polar Coordinates: Taking into Account of Iron Parts. Math. Comput. Appl. 2017, 22, 42. [Google Scholar] [CrossRef]
- Guo, B.; Djelloul-Khedda, Z.; Dubas, F. Nonlinear Analytical Solution in Axial Flux Permanent Magnet Machines using Scalar Potential. IEEE Ind. Electron. 2023. [Google Scholar] [CrossRef]
- Öchsner, A. Timoshenko Beam Theory. In Classical Beam Theories of Structural Mechanics; Springer: Cham, Switzerland, 2021; pp. 67–104. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Unit | Value |
|---|---|---|---|
| Young’s modulus | MPa | 2 | |
| Shear ratio | - | 0.85 | |
| Bulk modulus | MPa | 76,923 |
| Parameters | Symbol | Unit | Value |
|---|---|---|---|
| Outer magnet radius | mm | 93.5 | |
| Inner magnet radius | mm | 90.0 | |
| Outer modulation radius | mm | 89.0 | |
| Inner modulation radius | mm | 81.0 | |
| Outer stator radius | mm | 80.0 | |
| Opening slot radius | mm | 78.5 | |
| Slot radius | mm | 37.0 | |
| Stack length | mm | 45.0 | |
| Magnet pitch ratio | - | 0.9 | |
| Modulation pitch | rad | 0.5 | |
| Opening slot pitch | rad | 0.125 | |
| Slot pitch | rad | 0.8 | |
| Pole winding turn | - | - | 56 |
| Modulation number | - | 19 | |
| Slot number | - | 9 | |
| Magnet pole pair | - | 16 | |
| Vacuum permeability | |||
| Residual flux density of magnet | T | 1.2 | |
| Magnetic magnetization of magnet | A/m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, M.-D.; Kim, S.-M.; Lee, J.-I.; Shin, H.-S.; Lee, Y.-K.; Lee, H.-K.; Shin, K.-H.; Kim, Y.-J.; Phung, A.-T.; Choi, J.-Y. Prediction of Stress and Deformation Caused by Magnetic Attraction Force in Modulation Elements in a Magnetically Geared Machine Using Subdomain Modeling. Machines 2023, 11, 887. https://doi.org/10.3390/machines11090887
Nguyen M-D, Kim S-M, Lee J-I, Shin H-S, Lee Y-K, Lee H-K, Shin K-H, Kim Y-J, Phung A-T, Choi J-Y. Prediction of Stress and Deformation Caused by Magnetic Attraction Force in Modulation Elements in a Magnetically Geared Machine Using Subdomain Modeling. Machines. 2023; 11(9):887. https://doi.org/10.3390/machines11090887
Chicago/Turabian StyleNguyen, Manh-Dung, Su-Min Kim, Jeong-In Lee, Hyo-Seob Shin, Young-Keun Lee, Hoon-Ki Lee, Kyung-Hun Shin, Yong-Joo Kim, Anh-Tuan Phung, and Jang-Young Choi. 2023. "Prediction of Stress and Deformation Caused by Magnetic Attraction Force in Modulation Elements in a Magnetically Geared Machine Using Subdomain Modeling" Machines 11, no. 9: 887. https://doi.org/10.3390/machines11090887