
Simultaneous Fault Diagnostics for Three-Shaft Industrial Gas Turbine


Abstract
:1. Introduction
Case Engine
2. Fault Diagnostics
Gas Turbine Diagnostics Approaches
3. Diagnostics Development
3.1. Procedure
3.2. Selected Diagnostics Set Measurements
3.3. Fault Detection and Isolation Patterns
3.4. Sensor Noise Incorporation
3.5. Data Normalization
- y is the scaled value,
- Xmax is the maximum scaling range,
- Xmin is the minimum scaling range,
- x is the value to be scaled,
- Ymax is the maximum value of the parameter to be scaled, and
- Ymin is the minimum value of the parameter to be scaled.
3.6. Tested Machine Learning Algorithms/Candidate
3.7. Fault Detection and Isolation Results and Discussion
3.7.1. Single Fault Detection and Isolation
- Pre-set Network: Neural Network
- Number of neurons in the hidden layer: 11
- Training Data Observation: 819 (75%)
- Testting Data Observation: 274 (25%)
- Training and Validation: 4-K-fold cross validation
- Training algorithm: Levenberg Marquardt
- Predictors variables: 10
- Response Classes: 13
- Activation function: Relu
3.7.2. Double Fault Detection and Isolation
- Machine learning technique: Neural Network
- Number of neurons in the hidden layer: 28
- Training Data Observation: 15,372 (75%)
- Testing Data Observation: 5124 (25%)
- Training and Validation: 4-K-fold cross-validation
- Predictors variables: 10
- Response Classes: 61
- Activation function: ReLU
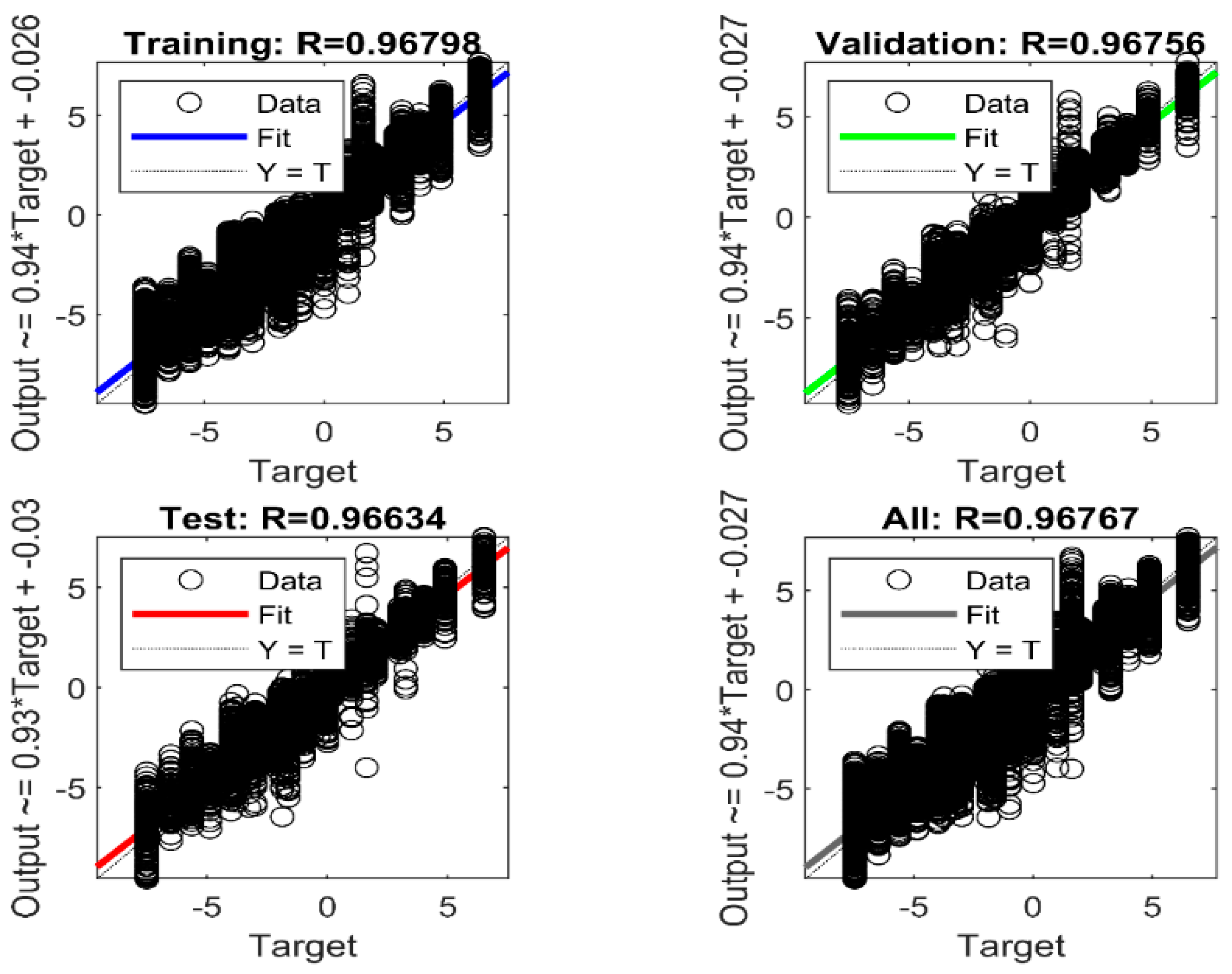
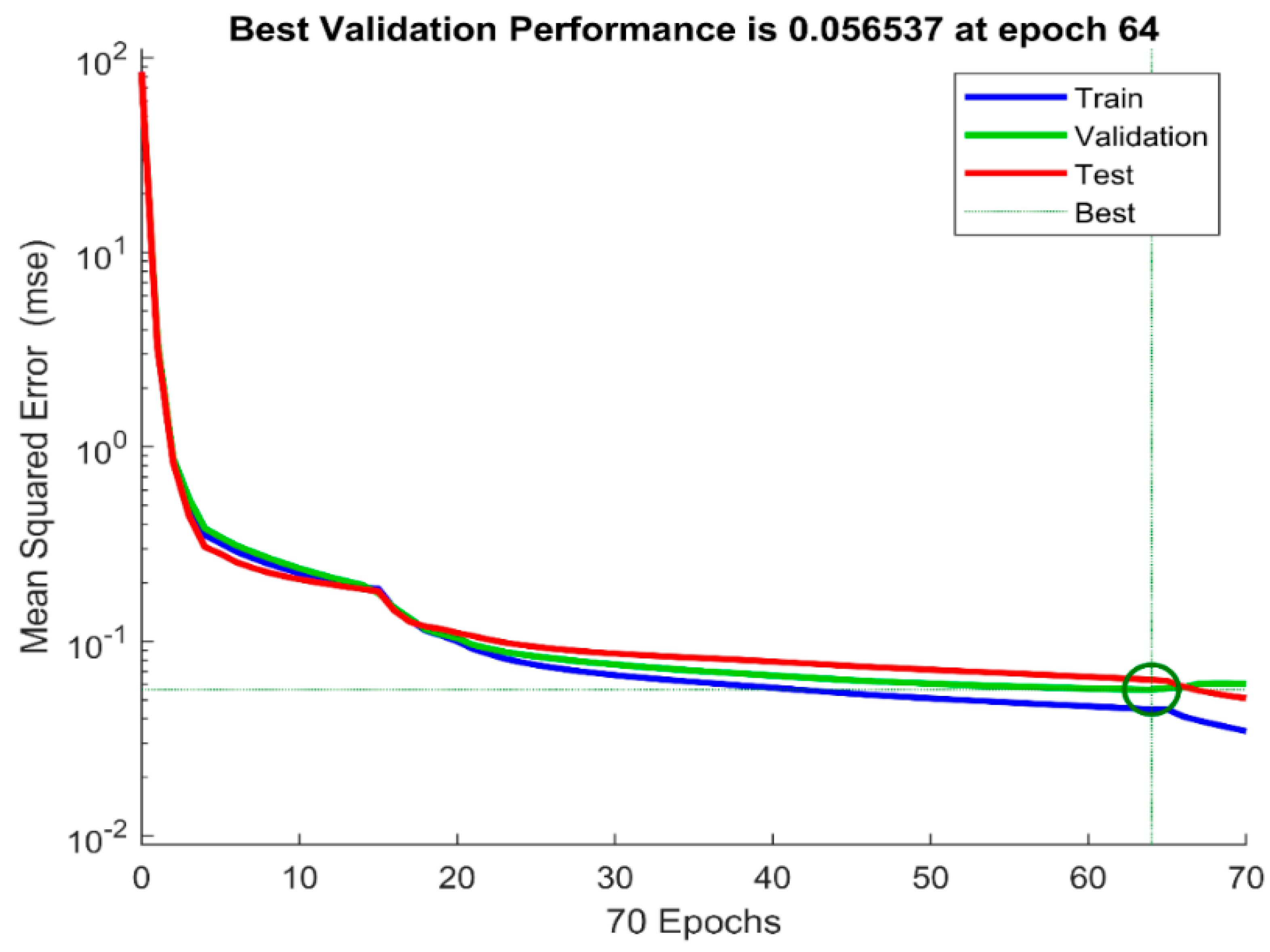
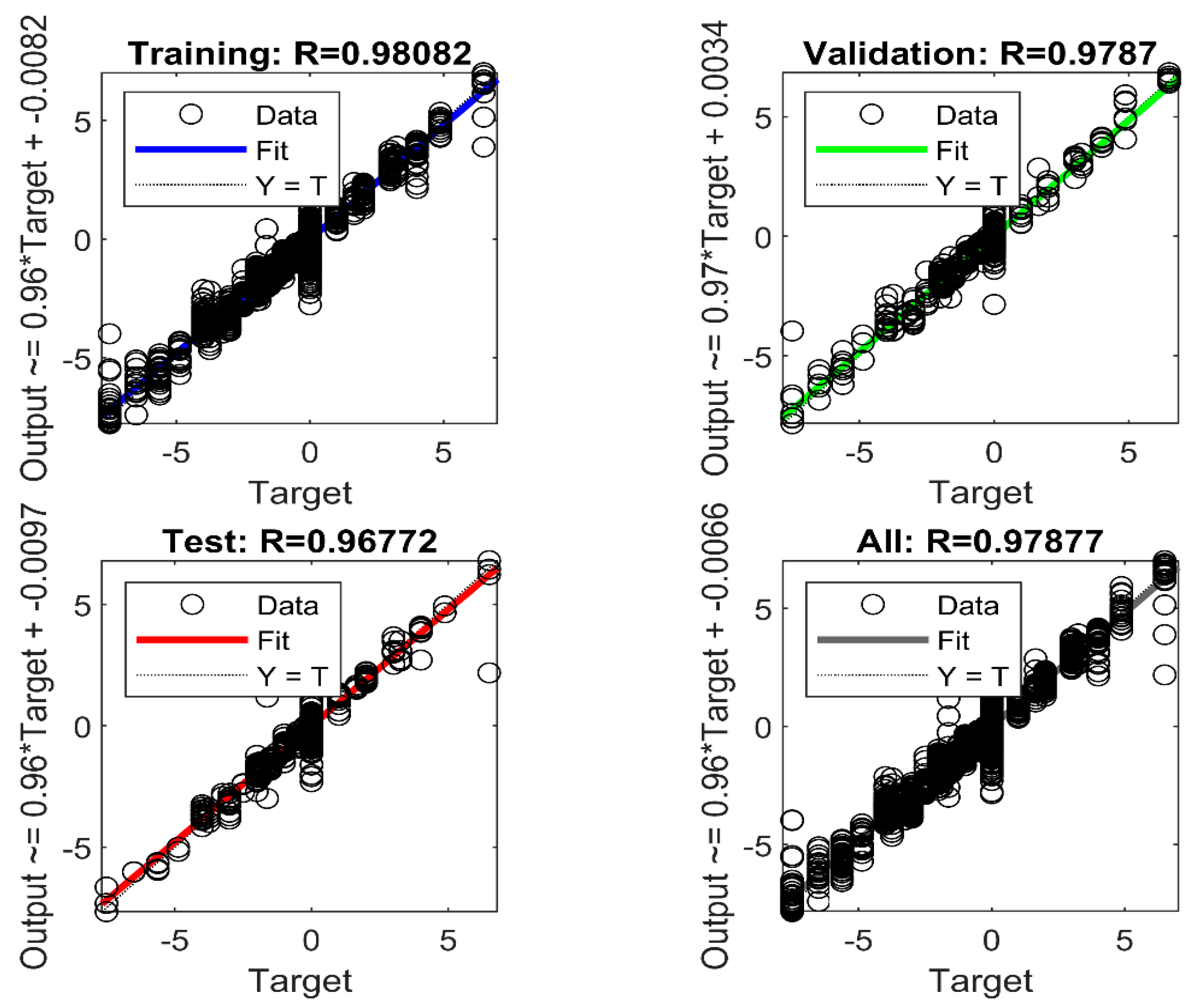
3.8. Fault Identification Model Results
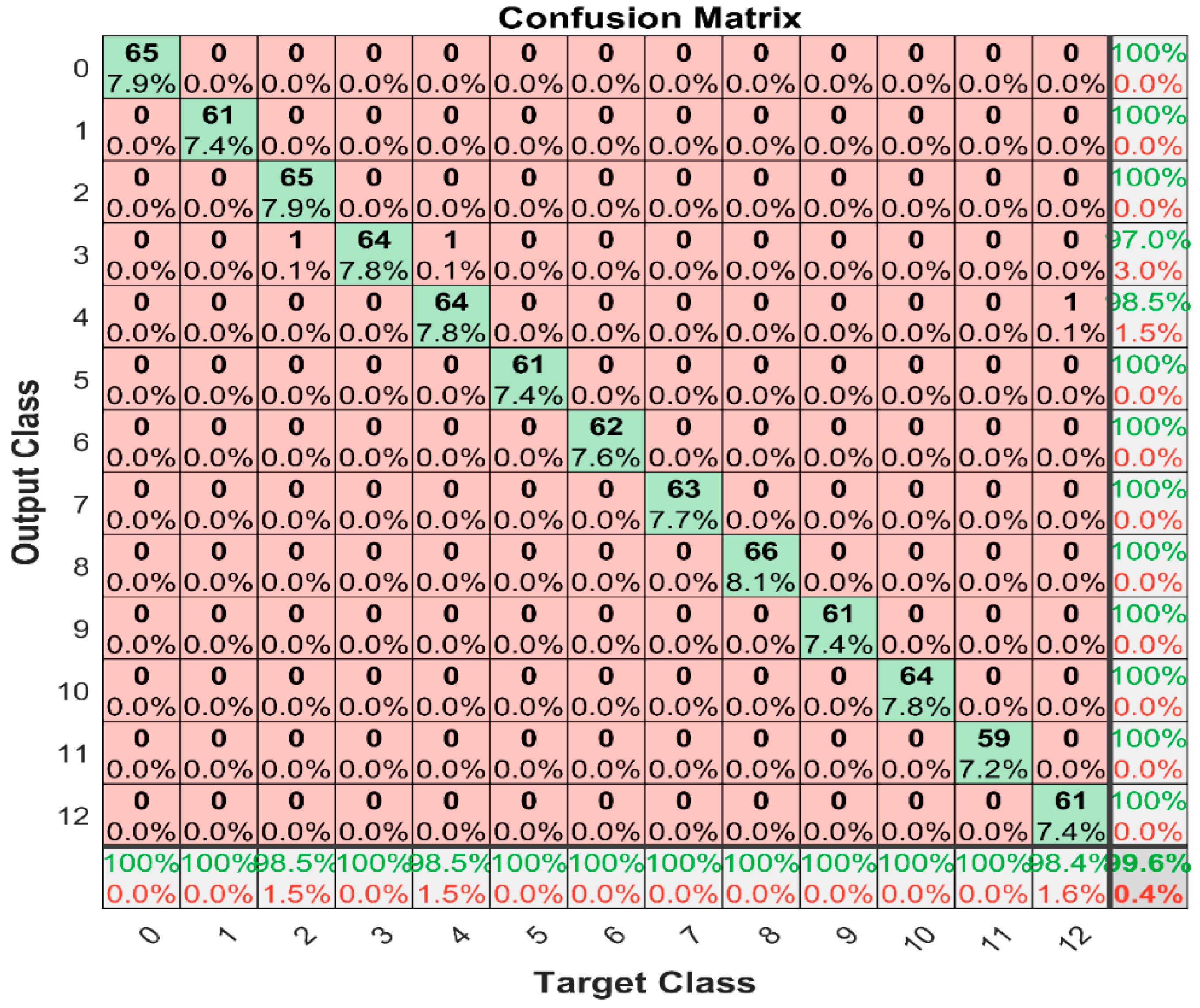
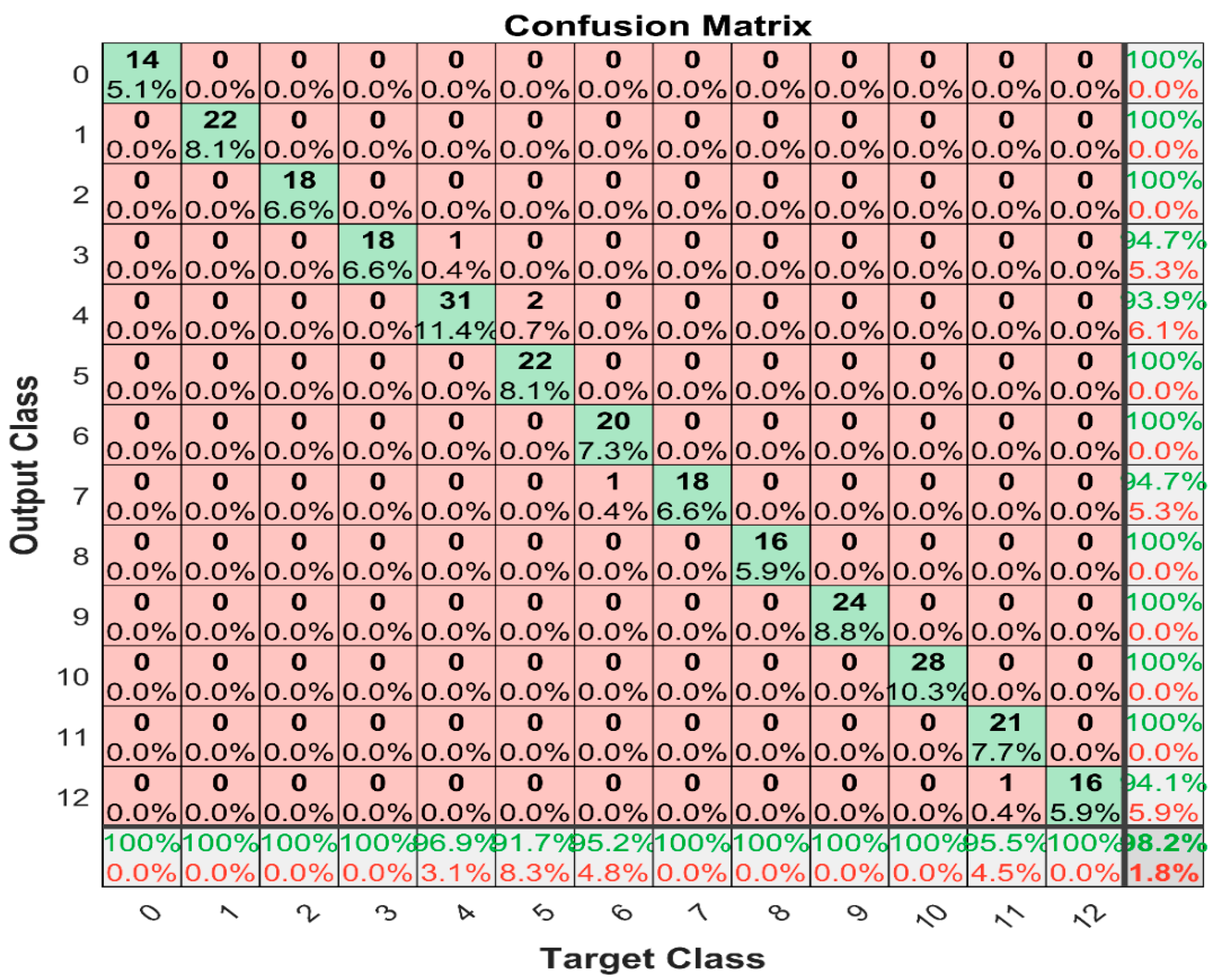
3.8.1. Single Fault Identification at 100% Load
- Pre-set Network: Neural Network
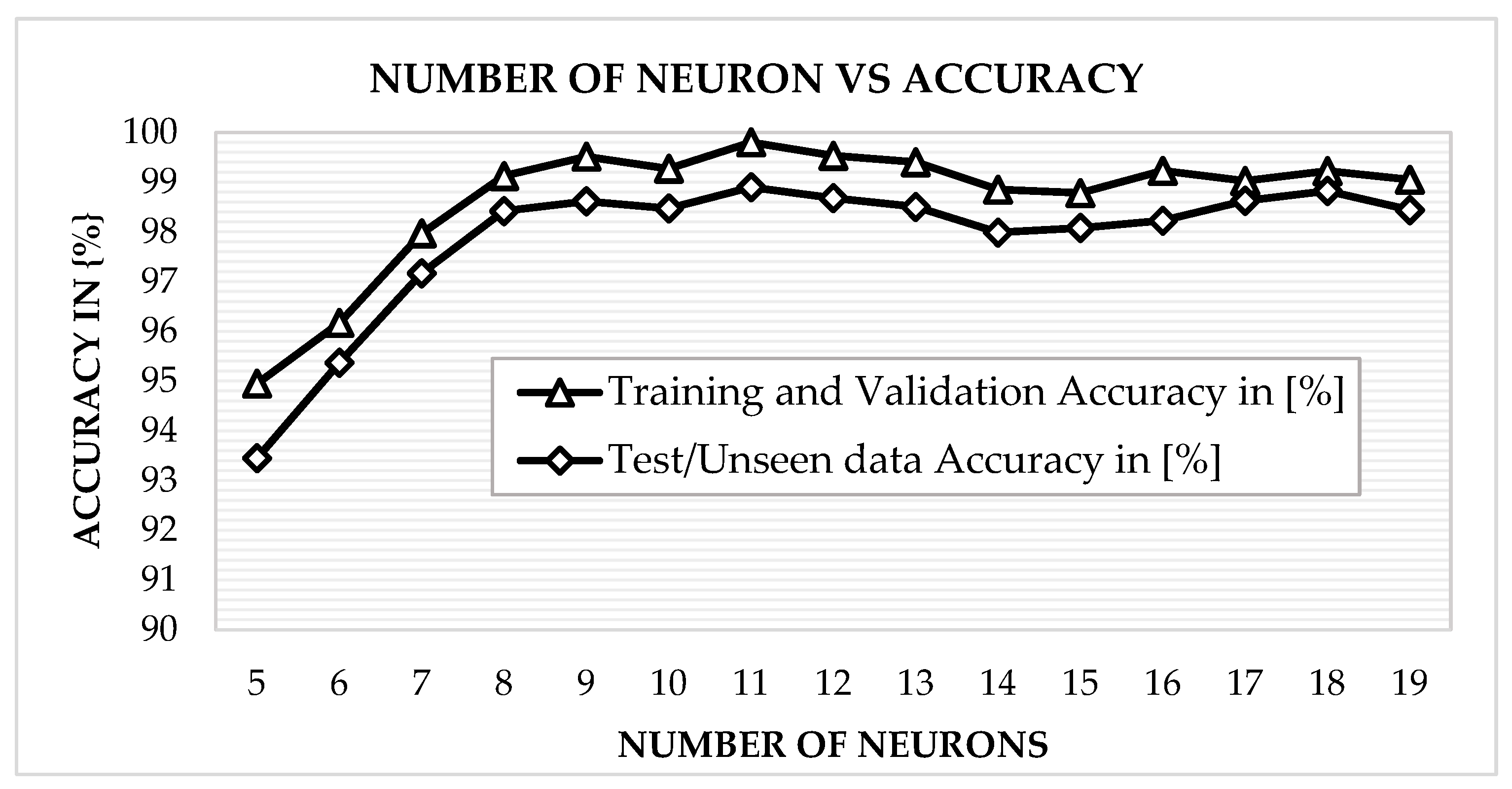
- Number of Neurons in the Hidden Layer: 17
- Training Data Observation: 765
- Validation Data Observation: 164
- Test Data Observation: 164
- Training Algorithm: Levenberg Marquardt
- Predictors Variables: 10
- Response Classes: 11
- Activation Function: ReLU
- Performance: Mean Square Error
- Data Division: Random
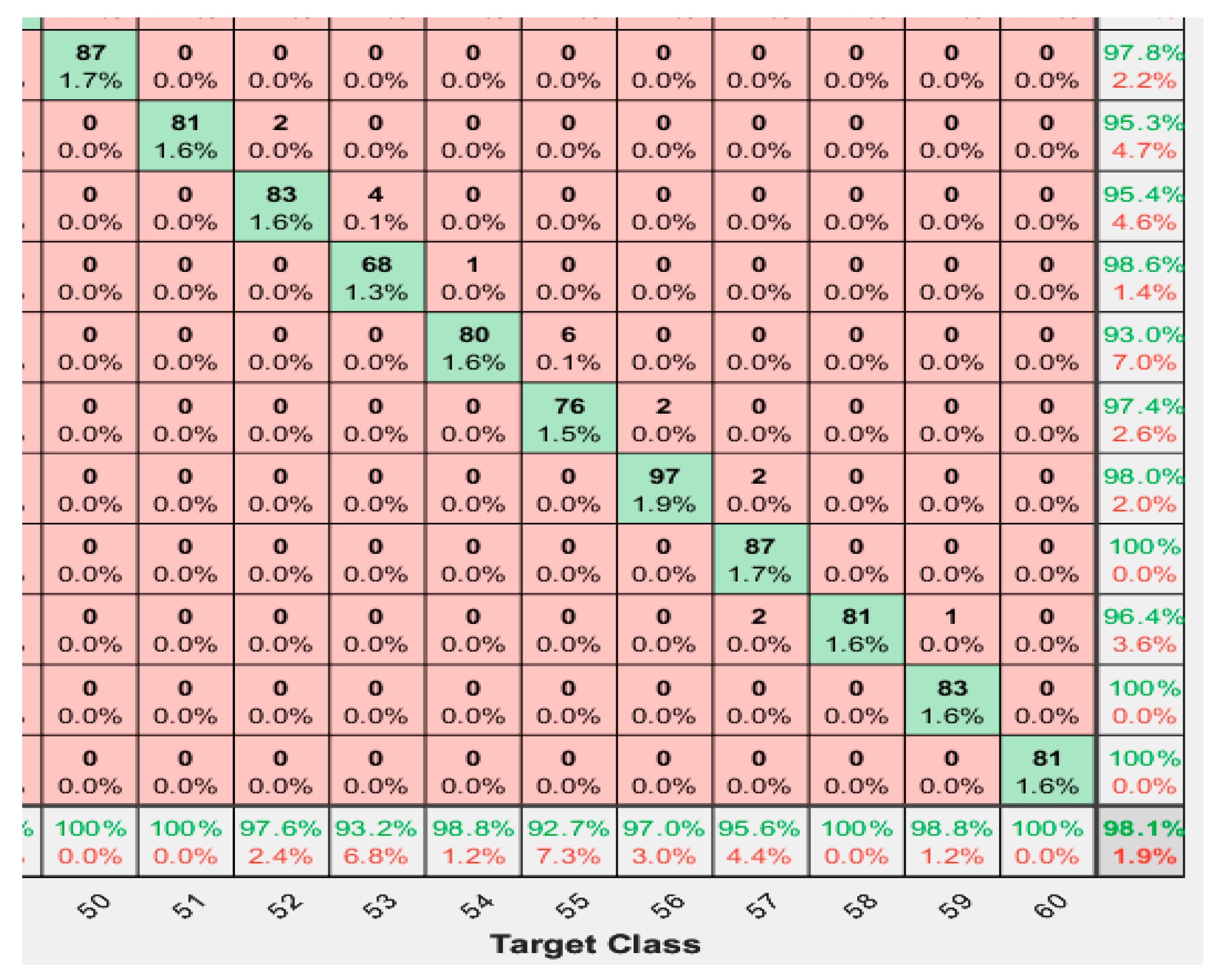
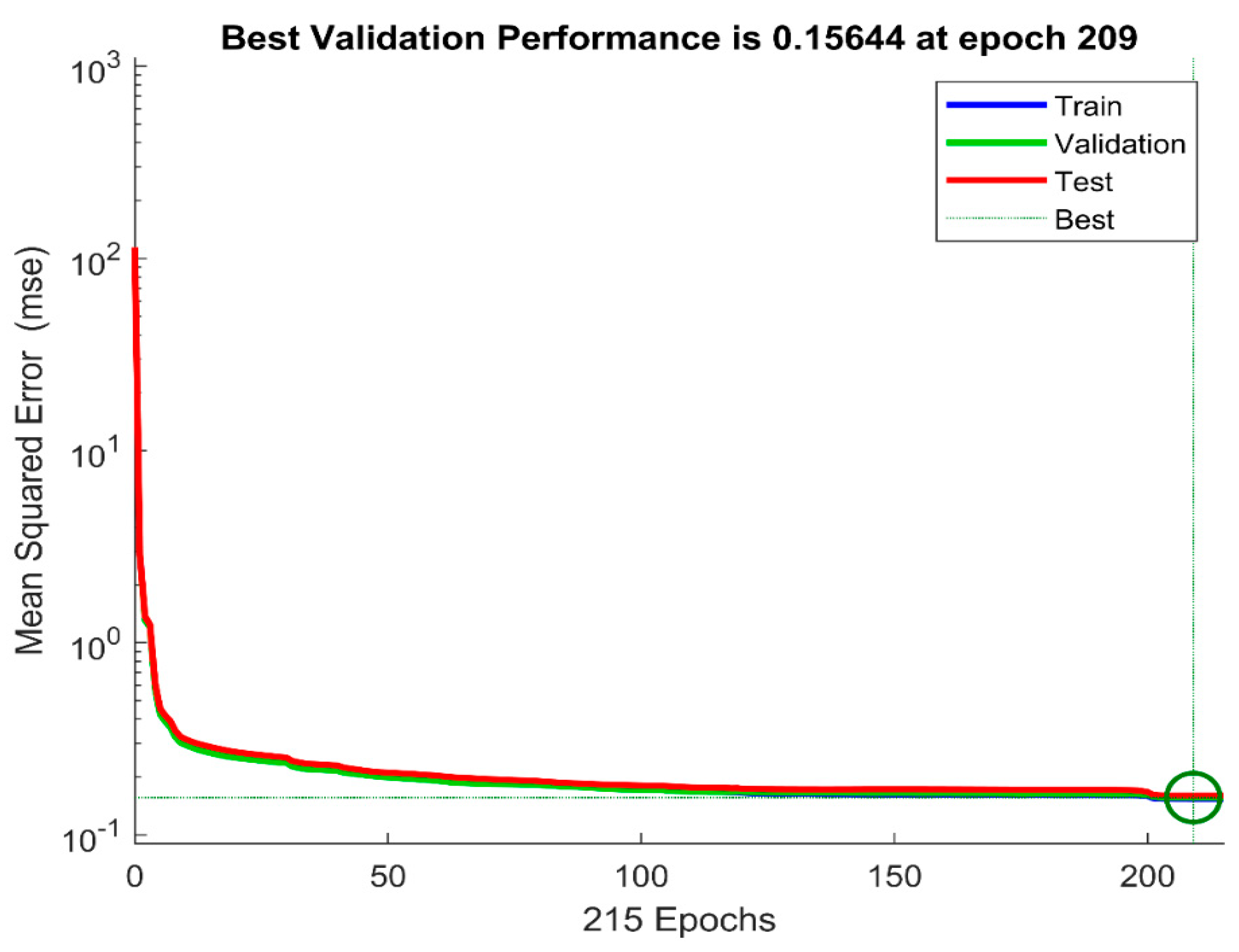
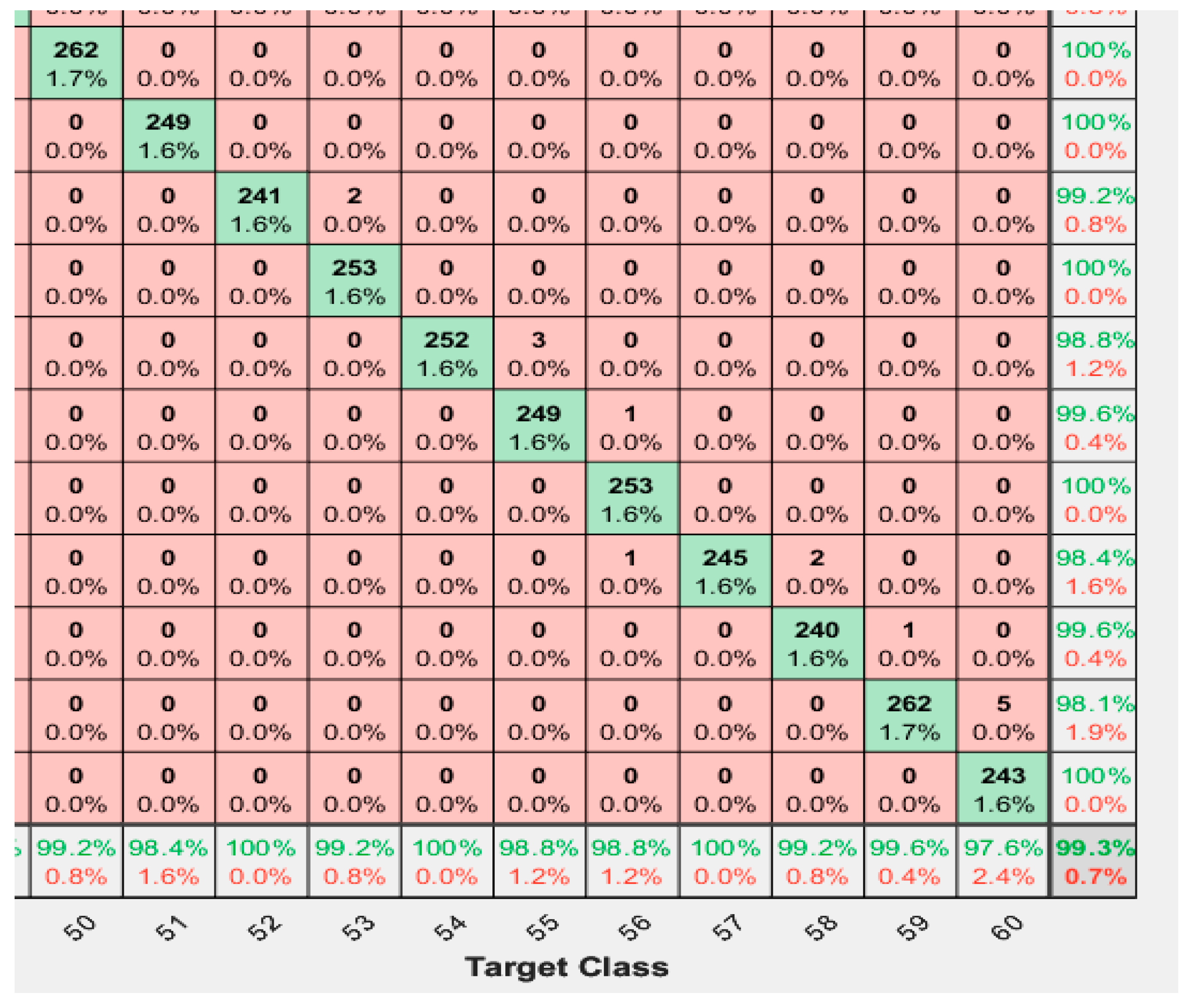
3.8.2. Double Fault Identification at 100% Load
- Pre-set Network: Neural Network
- Number of Neurons in the Hidden Layer: 21
- Training Data Observation: 14,346
- Validation Data Observation: 3075
- Test Data Observation: 3075
- Training Algorithm: Levenberg Marquardt
- Predictors Variables: 10
- Response Classes: 11
- Activation Function: ReLU
- Performance: Mean Square Error
- Data Division: Random
3.9. Comparison of Diagnostics Results with Available Literature
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| AANN | Autoassociative neural network |
| AI | Artificial intelligence |
| ANN | Artificial neural network |
| BBN | Bayesian belief network |
| CBM | Compound annual growth rate |
| CC | Combustion chamber |
| DCF | Double component fault |
| DD | Data driven |
| DL | Deep learning |
| DOD | Domestic object damage |
| FDI | Fault detection, isolation |
| FF | Fuel flow |
| FL | Fuzzy logic |
| FOD | Foreign object damage |
| GA | Genetic algorithm |
| GPA | Gas-path analysis |
| GT | Gas turbine |
| HPC | High-pressure compressor |
| HPT | High-pressure turbine |
| LPC | Low-pressure compressor |
| LPT | Low-pressure turbine |
| MB | Model-based |
| MLPNN | Multilayer perceptron neural network |
| MRO | Maintenance repair and overhaul |
| N1 | Low-pressure spool speed |
| N2 | High-pressure spool speed |
| P24 | Low-pressure compressor exit pressure |
| P3 | High-pressure compressor exit pressure |
| P43 | High-pressure turbine exit pressure |
| P47 | Low-pressure turbine exit pressure |
| PT | Power turbine |
| SVM | Support vector machine |
| T24 | Low-pressure compressor exit temperature |
| T3 | High-pressure compressor exit temperature |
| T5 | Power turbine exit temperature |
Appendix A. Fault Pattern

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Description | Fault ID | Fault Magnitude | Ambient Temperature Range | Observation |
|---|---|---|---|---|
| Clean | 0 | 0% | −233.15 K to 313.15 K at 4 increments | 84 |
| LPC Fouling | 1 | 25%, 50%, 75% and 100% | 84 | |
| HPC Fouling | 2 | 84 | ||
| HPT Fouling | 3 | 84 | ||
| LPT Fouling | 4 | 84 | ||
| PT Fouling | 5 | 84 | ||
| LPC Erosion | 6 | 84 | ||
| HPC Erosion | 7 | 84 | ||
| HPT Erosion | 8 | 84 | ||
| LPT Erosion | 9 | 84 | ||
| PT Erosion | 10 | 84 | ||
| VIGV Updrift | 11 | 1.65°, 3.25°, 4.875°, 6.5° | 84 | |
| VIGV Downdrift | 12 | −1.65°, −3.25°, −4.875°, −6.5° | 84 |
| Fault Description | Fault ID | Fault Magnitude | Ambient Temperature Range | Observation |
|---|---|---|---|---|
| Clean | 0 | 0% | −233.15 K to 313.15 K at 4 increment | 336 |
| LPC Fouling & HPC Fouling | 1 | 25%, 50%, 75% and 100% | 336 | |
| LPC Fouling & HPC Erosion | 2 | 336 | ||
| LPC Erosion & HPC Fouling | 3 | 336 | ||
| LPC Erosion & HPC Erosion | 4 | 336 | ||
| LPC Fouling & HPT Fouling | 5 | 336 | ||
| LPC Fouling & HPT Erosion | 6 | 336 | ||
| LPC Erosion & HPT Fouling | 7 | 336 | ||
| LPC Erosion & HPT Erosion | 8 | 336 | ||
| LPC Fouling & LPT Fouling | 9 | 336 | ||
| LPC Fouling & LPT Erosion | 10 | 336 | ||
| LPC Erosion & LPT Fouling | 11 | 336 | ||
| LPC Erosion & LPT Erosion | 12 | 336 | ||
| LPC Fouling & PT Fouling | 13 | 336 | ||
| LPC Fouling & PT Erosion | 14 | 336 | ||
| LPC Erosion & PT Fouling | 15 | 336 | ||
| LPC Erosion & PT Erosion | 16 | 336 | ||
| HPC Fouling & HPT Fouling | 17 | 336 | ||
| HPC Fouling & HPT Erosion | 18 | 336 | ||
| HPC Erosion & HPT Fouling | 19 | 336 | ||
| HPC Erosion & HPT Erosion | 20 | 336 | ||
| HPC Fouling & LPT Fouling | 21 | 336 | ||
| HPC Fouling & LPT Erosion | 22 | 336 | ||
| HPC Erosion & LPT Fouling | 23 | 336 | ||
| HPC Erosion & LPT Erosion | 24 | 336 | ||
| HPC Fouling & PT Fouling | 25 | 336 | ||
| HPC Fouling & PT Erosion | 26 | 336 | ||
| HPC Erosion & PT Fouling | 27 | 336 | ||
| HPC Erosion & PT Erosion | 28 | 336 | ||
| HPT Fouling & LPT Fouling | 29 | 336 | ||
| HPT Fouling & LPT Erosion | 30 | 336 | ||
| HPT Erosion & LPT Fouling | 31 | 336 | ||
| HPT Erosion & LPT Erosion | 32 | 336 | ||
| HPT Fouling & PT Fouling | 33 | 336 | ||
| HPT Fouling & PT Erosion | 34 | 336 | ||
| HPT Erosion & PT Fouling | 35 | 336 | ||
| HPT Erosion & PT Erosion | 36 | 336 | ||
| LPT Fouling & PT Fouling | 37 | 336 | ||
| LPT Fouling & PT Erosion | 38 | 336 | ||
| LPT Erosion & PT Fouling | 39 | 336 | ||
| LPT Erosion & PT Erosion | 40 | 336 | ||
| LPC Fouling & VIGV Updrift | 41 | 1.65°, 3.25°, 4.875°, 6.5° | 336 | |
| HPC Fouling & VIGV Updrift | 42 | 336 | ||
| HPT Fouling & VIGV Updrift | 43 | 336 | ||
| LPT Fouling & VIGV Updrift | 44 | 336 | ||
| PT Fouling & VIGV Updrift | 45 | 336 | ||
| LPC Fouling & VIGV Downdrift | 46 | −1.65°, −3.25°, −4.875°, −6.5° | 336 | |
| HPC Fouling & VIGV Downdrift | 47 | 336 | ||
| HPT Fouling & VIGV Downdrift | 48 | 336 | ||
| LPT Fouling & VIGV Downdrift | 49 | 336 | ||
| PT Fouling & VIGV Downdrift | 50 | 336 | ||
| LPC Erosion & VIGV Updrift | 51 | 1.65°, 3.25°, 4.875°, 6.5° | 336 | |
| HPC Erosion & VIGV Updrift | 52 | 336 | ||
| HPT Erosion & VIGV Updrift | 53 | 336 | ||
| LPT Erosion & VIGV Updrift | 54 | 336 | ||
| PT Erosion & VIGV Updrift | 55 | 336 | ||
| LPC Erosion & VIGV Downdrift | 56 | −1.65°, −3.25°, −4.875°, −6.5° | 336 | |
| HPC Erosion & VIGV Downdrift | 57 | 336 | ||
| HPT Erosion & VIGV Downdrift | 58 | 336 | ||
| LPT Erosion & VIGV Downdrift | 59 | 336 | ||
| PT Erosion & VIGV Downdrift | 60 | 336 |
Appendix B. Single Fault Detection and Isolation


- Pre-set Network: Neural Network
- Number of Neurons in the Hidden Layer: 15
- Training Data Observation: 819 (75%)
- Testing Data Observation: 274 (25%)
- Training and Validation: 4-K-fold Cross-validation
- Training Algorithm: Levenberg Marquardt
- Predictors Variables: 10
- Response Classes: 13
- Activation Function: ReLU


- Pre-set Network: Neural Network
- Number of Neurons in the Hidden Layer: 12
- Training Data Observation: 819 (75%)
- Testing Data Observation: 274 (25%)
- Training and Validation: 4-K-fold Cross-validation
- Training Algorithm: Levenberg Marquardt
- Predictors Variables: 10
- Response Classes: 13
- Activation Function: ReLU
Appendix C. Double Fault Detection and Isolation


- Machine Learning Technique: Neural Network
- Number of Neurons in the Hidden Layer: 32
- Training Data Observation: 15,372 (75%)
- Training Data Observation: 5124 (25%)
- Training and Validation: 4-K-fold Cross-validation
- Predictors Variables: 10
- Response Classes: 61
- Activation Function: ReLU


- Machine Learning Technique: Neural Network
- Number of Neurons in the Hidden Layer: 30
- Training Data Observation: 15,372 (75%)
- Training Data Observation: 5124 (25%)
- Training and Validation: 4-K-fold Cross-validation
- Predictors Variables: 10
- Response Classes: 61
- Activation Function: ReLU
Appendix D. Fault Identification Pattern
| NO | Fault Description | Predictor | Response |
|---|---|---|---|
| 1 | Clean | P24 T24 P3 T3 P43 P47 T5 FF N1 N2 | All components are zero |
| 2 | LPC Fouling | ||
| 3 | HPC Fouling | ||
| 4 | HPT Fouling | ||
| 5 | LPT Fouling | ||
| 6 | PT Fouling | ||
| 7 | LPC Erosion | ||
| 8 | HPC Erosion | ||
| 9 | HPT Erosion | ||
| 10 | LPT Erosion | ||
| 11 | PT Erosion | ||
| 12 | VIGV Updrift | ||
| 13 | VIGV Downdrift |
| NO | Fault Description | Predictor | Response |
|---|---|---|---|
| 1 | Clean | P24 T24 P3 T3 P43 P47 T5 FF N1 N2 | All components are zero |
| 2 | LPC Fouling & HPC Fouling | ||
| 3 | LPC Fouling & HPC Erosion | ||
| 4 | LPC Erosion & HPC Fouling | ||
| 5 | LPC Erosion & HPC Erosion | ||
| 6 | LPC Fouling & HPT Fouling | ||
| 7 | LPC Fouling & HPT Erosion | ||
| 8 | LPC Erosion & HPT Fouling | ||
| 9 | LPC Erosion & HPT Erosion | ||
| 10 | LPC Fouling & LPT Fouling | ||
| 11 | LPC Fouling & LPT Erosion | ||
| 12 | LPC Erosion & LPT Fouling | ||
| 13 | LPC Erosion & LPT Erosion | ||
| 14 | LPC Fouling & PT Fouling | ||
| 15 | LPC Fouling & PT Erosion | ||
| 16 | LPC Erosion & PT Fouling | ||
| 17 | LPC Erosion & PT Erosion | ||
| 18 | HPC Fouling & HPT Fouling | ||
| 19 | HPC Fouling & HPT Erosion | ||
| 20 | HPC Erosion & HPT Fouling | ||
| 21 | HPC Erosion & HPT Erosion | ||
| 22 | HPC Fouling & LPT Fouling | ||
| 23 | HPC Fouling & LPT Erosion | ||
| 24 | HPC Erosion & LPT Fouling | ||
| 25 | HPC Erosion & LPT Erosion | ||
| 26 | HPC Fouling & PT Fouling | ||
| 27 | HPC Fouling & PT Erosion | ||
| 28 | HPC Erosion & PT Fouling | ||
| 29 | HPC Erosion & PT Erosion | ||
| 30 | HPT Fouling & LPT Fouling | ||
| 31 | HPT Fouling & LPT Erosion | ||
| 32 | HPT Erosion & LPT Fouling | ||
| 33 | HPT Erosion & LPT Erosion | ||
| 34 | HPT Fouling & PT Fouling | ||
| 35 | HPT Fouling & PT Erosion | ||
| 36 | HPT Erosion & PT Fouling | ||
| 37 | HPT Erosion & PT Erosion | ||
| 38 | LPT Fouling & PT Fouling | ||
| 39 | LPT Fouling & PT Erosion | ||
| 40 | LPT Erosion & PT Fouling | ||
| 41 | LPT Erosion & PT Erosion | ||
| 42 | LPC Fouling & VIGV Updrift | ||
| 43 | HPC Fouling & VIGV Updrift | ||
| 44 | HPT Fouling & VIGV Updrift | ||
| 45 | LPT Fouling & VIGV Updrift | ||
| 46 | PT Fouling & VIGV Updrift | ||
| 47 | LPC Fouling & VIGV Downdrift | ||
| 48 | HPC Fouling & VIGV Downdrift | ||
| 49 | HPT Fouling & VIGV Downdrift | ||
| 50 | LPT Fouling & VIGV Downdrift | ||
| 51 | PT Fouling & VIGV Downdrift | ||
| 52 | LPC Erosion & VIGV Updrift | ||
| 53 | HPC Erosion & VIGV Updrift | ||
| 54 | HPT Erosion & VIGV Updrift | ||
| 55 | LPT Erosion & VIGV Updrift | ||
| 56 | PT Erosion & VIGV Updrift | ||
| 57 | LPC Erosion & VIGV Downdrift | ||
| 58 | HPC Erosion & VIGV Downdrift | ||
| 59 | HPT Erosion & VIGV Downdrift | ||
| 60 | LPT Erosion & VIGV Downdrift | ||
| 61 | PT Erosion & VIGV Downdrift |
Appendix E. Single Fault Identification


- Pre-set Network: Neural Network
- Number of Neurons in the Hidden Layer: 20
- Training Data Observation: 765
- Validation Data Observation: 164
- Test Data Observation: 164
- Training Algorithm: Levenberg Marquardt
- Predictors Variables: 10
- Response Classes: 11
- Activation function: ReLU
- Performance: Mean Square Error
- Data Division: Random


- Pre-set Network: Neural Network
- Number of Neurons in the Hidden Layer: 19
- Training Data Observation: 765
- Validation Data Observation: 164
- Test Data Observation: 164
- Training Algorithm: Levenberg Marquardt
- Predictors Variables: 10
- Response Classes: 11
- Activation Function: ReLU
- Performance: Mean Square Error
- Data Division: Random
Appendix F. Single Fault Identification


- Pre-set Network: Neural Network
- Number of Neurons in the Hidden Layer: 25
- Training Data Observation: 14,346
- Validation Data Observation: 3075
- Test Data Observation: 3075
- Training Algorithm: Levenberg Marquardt
- Predictors Variables: 10
- Response Classes: 11
- Activation Function: ReLU
- Performance: Mean Square Error
- Data Division: Random


- Pre-set Network: Neural Network
- Number of Neurons in the Hidden Layer: 23
- Training Data Observation: 14,346
- Validation Data Observation: 3075
- Test Data Observation: 3075
- Training Algorithm: Levenberg Marquardt
- Predictors Variables: 10
- Response Classes: 11
- Activation Function: ReLU
- Performance: Mean Square Error
- Data Division: Random
References
- Benini, E. Progress in Gas Turbine Performance; BoD–Books on Demand: Holstein, Germany, 2013. [Google Scholar]
- Meher-Homji, C.B.; Chaker, M.A.; Motiwala, H.M. Gas Turbine Performance Deterioration. In Proceedings of the 30th Turbomachinery Symposium, College Station, TX, USA, 30 September–3 October 2001; Texas A&M University, Turbomachinery Laboratories: College Station, TX, USA, 2001. [Google Scholar]
- Meher-Homji, C.B.; Matthews, T.; Pelagotti, A.; Weyermann, H.P. Gas Turbines And Turbocompressors For LNG Service. In Proceedings of the 36th Turbomachinery Symposium, College Station, TX, USA, 2 August 2007; Texas A&M University, Turbomachinery Laboratories: College Station, TX, USA, 2007. [Google Scholar]
- Marinai, L.; Singh, R.; Curnock, B.; Probert, D. Detection and prediction of the performance deterioration of a turbofan engine. In Proceedings of the International Gas Turbine Congress, Tokyo, Japan, 2–7 November 2003; pp. 2–7. [Google Scholar]
- Diakunchak, I.S. Performance deterioration in industrial gas turbines. J. Eng. Gas Turbines Power 1992, 114, 161–168. [Google Scholar] [CrossRef]
- Melino, F.; Morini, M.; Peretto, A.; Pinelli, M.; Ruggero Spina, P. Compressor fouling modeling: Relationship between computational roughness and gas turbine operation time. J. Eng. Gas Turbines Power 2012, 134, 052401. [Google Scholar] [CrossRef]
- Meher-Homji, C.B.; Chaker, M.; Bromley, A.F. The fouling of axial flow compressors: Causes, effects, susceptibility, and sensitivity. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2009; Volume 48852, pp. 571–590. [Google Scholar]
- Morini, M.; Pinelli, M.; Spina, P.R.; Venturini, M. Influence of blade deterioration on compressor and turbine performance. J. Eng. Gas Turbines Power 2010, 132, 032401. [Google Scholar] [CrossRef]
- Giampaolo, T. The Gas Turbine Handbook: Principles and Practices; Prentice Hall: Hoboken, NJ, USA, 1997. [Google Scholar]
- Cruz-Manzo, S.; Panov, V.; Zhang, Y. Gas path fault and degradation modelling in twin-shaft gas turbines. Machines 2018, 6, 43. [Google Scholar] [CrossRef]
- Suman, A.; Casari, N.; Fabbri, E.; Pinelli, M.; di Mare, L.; Montomoli, F. Gas turbine fouling tests: Review, critical analysis, and particle impact behavior map. J. Eng. Gas Turbines Power 2019, 141, 4041282. [Google Scholar] [CrossRef]
- Hashmi, M.B.; Abd Majid, M.A.; Lemma, T.A. Combined effect of inlet air cooling and fouling on performance of variable geometry industrial gas turbines. Alex. Eng. J. 2020, 59, 1811–1821. [Google Scholar] [CrossRef]
- Madsen, S.; Bakken, L.E. Gas turbine fouling offshore: Effective online water wash through high water-to-air ratio. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2018; Volume 51180, p. V009T027A016. [Google Scholar]
- Herdzik, J. Dependence between nominal power deterioration and thermal efficiency of gas turbines due to fouling. Sci. J. Marit. Univ. Szczec. 2022, 69, 45–53. [Google Scholar]
- Diakunchak, I.S. Performance Deterioration in Industrial Gas Turbines; Citeseer: Princeton, NJ, USA, 1991; Volume 79016. [Google Scholar]
- Varelis, A.G. Technoeconomic Study of Engine Deterioration and Compressor Washing for Military Gas Turbine Engines; Cranfield University: Bedford, UK, 2008. [Google Scholar]
- Abdi, F.; Eftekharian, A.; Huang, D.; Choi, S.; Morscher, G.N.; Panakarajupally, R.P. ICME Modeling of Erosion in Gas-Turbine Grade CMC and HVOF Test. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2022; Volume 85970, p. V001T002A009. [Google Scholar]
- Salilew, W.M.; Abdul Karim, Z.A.; Lemma, T.A.; Fentaye, A.D.; Kyprianidis, K.G. The Effect of Physical Faults on a Three-Shaft Gas Turbine Performance at Full-and Part-Load Operation. Sensors 2022, 22, 7150. [Google Scholar] [CrossRef]
- Kurz, R.; Brun, K. Gas Turbine Tutorial-Maintenance And Operating Practices Effects On Degradation And Life. In Proceedings of the 36th Turbomachinery Symposium, College Station, TX, USA, 2 August 2007; Texas A&M University, Turbomachinery Laboratories: College Station, TX, USA, 2007. [Google Scholar]
- Muthuraman, S.; Twiddle, J.; Singh, M.; Connolly, N. Condition monitoring of SSE gas turbines using artificial neural networks. Insight-Non-Destr. Test. Cond. Monit. 2012, 54, 436–439. [Google Scholar] [CrossRef]
- Kurz, R.; Brun, K. Degradation of gas turbine performance in natural gas service. J. Nat. Gas Sci. Eng. 2009, 1, 95–102. [Google Scholar] [CrossRef]
- Diakunchak, I.S. Performance improvement in industrial gas turbines. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 1993; Volume 79092, p. V001T001A005. [Google Scholar]
- Kurz, R.; Brun, K.; Wollie, M. Degradation effects on industrial gas turbines. J. Eng. Gas Turbines Power 2009, 131, 062401. [Google Scholar] [CrossRef]
- Zwebek, A. Combined Cycle Performance Deterioration Analysis. Ph.D. Thesis, Cranfield University, Cranfield, UK, 2002. [Google Scholar]
- Jasmani, M.S.; Li, Y.-G.; Ariffin, Z. Measurement Selections for Multi-Component Gas Path Diagnostics Using Analytical Approach and Measurement Subset Concept. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2010; Volume 43987, pp. 569–579. [Google Scholar]
- Chapman, J.W.; Lavelle, T.M.; Litt, J.S. Practical techniques for modeling gas turbine engine performance. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016; p. 4527. [Google Scholar]
- Razak, A. Gas turbine performance modelling, analysis and optimisation. In Modern Gas Turbine Systems; Elsevier: Amsterdam, The Netherlands, 2013; pp. 423–514. [Google Scholar]
- Ahmad, N. Numerical Modeling and Analysis of Small Gas Turbine Engine: Part I: Analytical Model and Compressor CFD. Master’s Thesis, Royal Institute of Technology, Stockholm, Sweden, 2009. [Google Scholar]
- Zhong, S.-s.; Fu, S.; Lin, L. A novel gas turbine fault diagnosis method based on transfer learning with CNN. Measurement 2019, 137, 435–453. [Google Scholar] [CrossRef]
- Kamarzarrin, M.; Refan, M.H.; Amiri, P.; Dameshghi, A. A new intelligent fault diagnosis and prognosis method for wind turbine doubly-fed induction generator. Wind Eng. 2022, 46, 308–340. [Google Scholar] [CrossRef]
- Zhou, D.; Yao, Q.; Wu, H.; Ma, S.; Zhang, H. Fault diagnosis of gas turbine based on partly interpretable convolutional neural networks. Energy 2020, 200, 117467. [Google Scholar] [CrossRef]
- Li, W.; Huang, R.; Li, J.; Liao, Y.; Chen, Z.; He, G.; Yan, R.; Gryllias, K. A perspective survey on deep transfer learning for fault diagnosis in industrial scenarios: Theories, applications and challenges. Mech. Syst. Signal Process. 2022, 167, 108487. [Google Scholar] [CrossRef]
- Li, J.; Ying, Y. Gas turbine gas path diagnosis under transient operating conditions: A steady state performance model based local optimization approach. Appl. Therm. Eng. 2020, 170, 115025. [Google Scholar] [CrossRef]
- Fast, M.; Assadi, M.; De, S. Development and multi-utility of an ANN model for an industrial gas turbine. Appl. Energy 2009, 86, 9–17. [Google Scholar] [CrossRef]
- Fentaye, A.D.; Baheta, A.T.; Gilani, S.I.; Kyprianidis, K.G. A review on gas turbine gas-path diagnostics: State-of-the-art methods, challenges and opportunities. Aerospace 2019, 6, 83. [Google Scholar] [CrossRef]
- Tahan, M.; Tsoutsanis, E.; Muhammad, M.; Karim, Z.A. Performance-based health monitoring, diagnostics and prognostics for condition-based maintenance of gas turbines: A review. Appl. Energy 2017, 198, 122–144. [Google Scholar] [CrossRef]
- Salilew, W.M.; Karim, Z.A.A.; Lemma, T.A. Investigation of fault detection and isolation accuracy of different Machine learning techniques with different data processing methods for gas turbine. Alex. Eng. J. 2022, 61, 12635–12651. [Google Scholar] [CrossRef]
- Barad, S.G.; Ramaiah, P.; Giridhar, R.; Krishnaiah, G. Neural network approach for a combined performance and mechanical health monitoring of a gas turbine engine. Mech. Syst. Signal Process. 2012, 27, 729–742. [Google Scholar] [CrossRef]
- Fentaye, A.D.; Ul-Haq Gilani, S.I.; Baheta, A.T.; Li, Y.-G. Performance-based fault diagnosis of a gas turbine engine using an integrated support vector machine and artificial neural network method. Proc. Inst. Mech. Eng. Part A J. Power Energy 2019, 233, 786–802. [Google Scholar] [CrossRef]
- Tahan, M.; Muhammad, M.; Abdul Karim, Z.A. A multi-nets ANN model for real-time performance-based automatic fault diagnosis of industrial gas turbine engines. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 2865–2876. [Google Scholar] [CrossRef]
- Mathioudakis, K.; Kamboukos, P. Assessment of the effectiveness of gas path diagnostic schemes. J. Eng. Gas Turbines Power 2006, 128, 57–63. [Google Scholar] [CrossRef]
- Hanachi, H.; Mechefske, C.; Liu, J.; Banerjee, A.; Chen, Y. Performance-based gas turbine health monitoring, diagnostics, and prognostics: A survey. IEEE Trans. Reliab. 2018, 67, 1340–1363. [Google Scholar] [CrossRef]
- Kong, C. Review on advanced health monitoring methods for aero gas turbines using model based methods and artificial intelligent methods. Int. J. Aeronaut. Space Sci. 2014, 15, 123–137. [Google Scholar] [CrossRef]
- Escher, P. Pythia: An Object-Orientated Gas Path Analysis Computer Program for General Applications. Ph.D. Thesis, Cranfield University, Cranfield, UK, 1995. [Google Scholar]
- Fentaye, A.D.; Gilani, S.I.U.-H.; Baheta, A.T. Gas turbine gas path diagnostics: A review. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2016; Volume 74, p. 00005. [Google Scholar]
- Chen, Y.-Z.; Zhao, X.-D.; Xiang, H.-C.; Tsoutsanis, E. A sequential model-based approach for gas turbine performance diagnostics. Energy 2021, 220, 119657. [Google Scholar] [CrossRef]
- Lu, F.; Chen, Y.; Huang, J.; Zhang, D.; Liu, N. An integrated nonlinear model-based approach to gas turbine engine sensor fault diagnostics. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 2007–2021. [Google Scholar] [CrossRef]
- Kong, C.; Ki, J. Components map generation of gas turbine engine using genetic algorithms and engine performance deck data. J. Eng. Gas Turbines Power 2007, 129, 312–317. [Google Scholar] [CrossRef]
- Li, Y.; Pilidis, P.; Newby, M. An adaptation approach for gas turbine design-point performance simulation. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2005; Volume 47284, pp. 95–105. [Google Scholar]
- Kong, C.; Ki, J.; Kang, M. A new scaling method for component maps of gas turbine using system identification. J. Eng. Gas Turbines Power 2003, 125, 979–985. [Google Scholar] [CrossRef]
- Marinai, L.; Probert, D.; Singh, R. Prospects for aero gas-turbine diagnostics: A review. Appl. Energy 2004, 79, 109–126. [Google Scholar] [CrossRef]
- Li, Y. Performance-analysis-based gas turbine diagnostics: A review. Proc. Inst. Mech. Eng. Part A J. Power Energy 2002, 216, 363–377. [Google Scholar] [CrossRef]
- Djaidir, B.; Hafaifa, A.; Kouzou, A. Vibration detection in gas turbine rotor using artificial neural network combined with continuous wavelet. In Advances in Acoustics and Vibration, Proceedings of the International Conference on Acoustics and Vibration (ICAV2016), Hammamet, Tunisia, 21–23 March 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 101–113. [Google Scholar]
- Talaat, M.; Gobran, M.; Wasfi, M. A hybrid model of an artificial neural network with thermodynamic model for system diagnosis of electrical power plant gas turbine. Eng. Appl. Artif. Intell. 2018, 68, 222–235. [Google Scholar] [CrossRef]
- Soomro, A.A.; Mokhtar, A.A.; Salilew, W.M.; Abdul Karim, Z.A.; Abbasi, A.; Lashari, N.; Jameel, S.M. Machine Learning Approach to Predict the Performance of a Stratified Thermal Energy Storage Tank at a District Cooling Plant Using Sensor Data. Sensors 2022, 22, 7687. [Google Scholar] [CrossRef] [PubMed]
- Soomro, A.A.; Mokhtar, A.A.; Kurnia, J.C.; Lashari, N.; Lu, H.; Sambo, C. Integrity assessment of corroded oil and gas pipelines using machine learning: A systematic review. Eng. Fail. Anal. 2022, 131, 105810. [Google Scholar] [CrossRef]
- Sun, X.-L.; Wang, N. Gas turbine fault diagnosis using intuitionistic fuzzy fault Petri nets. J. Intell. Fuzzy Syst. 2018, 34, 3919–3927. [Google Scholar] [CrossRef]
- Amare, F.; Gilani, S.; Aklilu, B.; Mojahid, A. Two-shaft stationary gas turbine engine gas path diagnostics using fuzzy logic. J. Mech. Sci. Technol. 2017, 31, 5593–5602. [Google Scholar] [CrossRef]
- Yazdani, S.; Montazeri-Gh, M. A novel gas turbine fault detection and identification strategy based on hybrid dimensionality reduction and uncertain rule-based fuzzy logic. Comput. Ind. 2020, 115, 103131. [Google Scholar] [CrossRef]
- Soomro, A.A.; Mokhtar, A.A.; Kurnia, J.C.; Lashari, N.; Sarwar, U.; Jameel, S.M.; Inayat, M.; Oladosu, T.L. A review on Bayesian modeling approach to quantify failure risk assessment of oil and gas pipelines due to corrosion. Int. J. Press. Vessel. Pip. 2022, 200, 104841. [Google Scholar] [CrossRef]
- Mirhosseini, A.M.; Adib Nazari, S.; Maghsoud Pour, A.; Etemadi Haghighi, S.; Zareh, M. Probabilistic failure analysis of hot gas path in a heavy-duty gas turbine using Bayesian networks. Int. J. Syst. Assur. Eng. Manag. 2019, 10, 1173–1185. [Google Scholar] [CrossRef]
- Zaccaria, V.; Rahman, M.; Aslanidou, I.; Kyprianidis, K. A review of information fusion methods for gas turbine diagnostics. Sustainability 2019, 11, 6202. [Google Scholar] [CrossRef]
- Zaccaria, V.; Fentaye, A.D.; Kyprianidis, K. Assessment of dynamic Bayesian models for gas turbine diagnostics, Part 1: Prior probability analysis. Machines 2021, 9, 298. [Google Scholar] [CrossRef]
- Luo, H.; Zhong, S. Gas turbine engine gas path anomaly detection using deep learning with Gaussian distribution. In Proceedings of the 2017 Prognostics and System Health Management Conference (PHM-Harbin), Harbin, China, 9–12 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Mohtasham Khani, M.; Vahidnia, S.; Ghasemzadeh, L.; Ozturk, Y.E.; Yuvalaklioglu, M.; Akin, S.; Ure, N.K. Deep-learning-based crack detection with applications for the structural health monitoring of gas turbines. Struct. Health Monit. 2020, 19, 1440–1452. [Google Scholar] [CrossRef]
- Yan, W.; Yu, L. On accurate and reliable anomaly detection for gas turbine combustors: A deep learning approach. arXiv 2019, arXiv:1908.09238. [Google Scholar]
- Yan, W. Detecting gas turbine combustor anomalies using semi-supervised anomaly detection with deep representation learning. Cogn. Comput. 2020, 12, 398–411. [Google Scholar] [CrossRef]
- Manservigi, L.; Murray, D.; de la Iglesia, J.A.; Ceschini, G.F.; Bechini, G.; Losi, E.; Venturini, M. Detection of Unit of Measure Inconsistency in gas turbine sensors by means of Support Vector Machine classifier. ISA Trans. 2022, 123, 323–338. [Google Scholar] [CrossRef]
- Yan, L.; Cao, Y.; Liu, R.; Zhao, T.; Li, S. A Support Vector Machine Fault Diagnosis Method for Gas Turbine Fuel System. In Proceedings of the TEPEN 2022: Efficiency and Performance Engineering Network, Online, 18–21 August 2022; Springer: Berlin/Heidelberg, Germany, 2023; pp. 985–994. [Google Scholar]
- Wang, H.; Peng, M.-j.; Hines, J.W.; Zheng, G.-y.; Liu, Y.-k.; Upadhyaya, B.R. A hybrid fault diagnosis methodology with support vector machine and improved particle swarm optimization for nuclear power plants. ISA Trans. 2019, 95, 358–371. [Google Scholar] [CrossRef]
- Xi, P.-P.; Zhao, Y.-P.; Wang, P.-X.; Li, Z.-Q.; Pan, Y.-T.; Song, F.-Q. Least squares support vector machine for class imbalance learning and their applications to fault detection of aircraft engine. Aerosp. Sci. Technol. 2019, 84, 56–74. [Google Scholar] [CrossRef]
- Aslinezhad, M.; Hejazi, M.A. Turbine blade tip clearance determination using microwave measurement and k-nearest neighbour classifier. Measurement 2020, 151, 107142. [Google Scholar] [CrossRef]
- Naimi, A.; Deng, J.; Shimjith, S.; Arul, A.J. Fault detection and isolation of a pressurized water reactor based on neural network and k-nearest neighbor. IEEE Access 2022, 10, 17113–17121. [Google Scholar] [CrossRef]
- Hadi, A.H.; Shareef, W.F. In-Situ Event Localization for Pipeline Monitoring System Based Wireless Sensor Network Using K-Nearest Neighbors and Support Vector Machine. J. Al-Qadisiyah Comput. Sci. Math. 2020, 12, 11–15. [Google Scholar]
- Li, Y.-G. Diagnostics of power setting sensor fault of gas turbine engines using genetic algorithm. Aeronaut. J. 2017, 121, 1109–1130. [Google Scholar] [CrossRef]
- Ahn, B.H.; Yu, H.T.; Choi, B.K. Feature-based analysis for fault diagnosis of gas turbine using machine learning and genetic algorithms. J. Korean Soc. Precis. Eng. 2018, 35, 163–167. [Google Scholar] [CrossRef]
- Yinfeng, L.; Jafari, S.; Nikolaidis, T. Advanced optimization of gas turbine aero-engine transient performance using linkage-learning genetic algorithm: Part II, optimization in flight mission and controller gains correlation development. Chin. J. Aeronaut. 2021, 34, 568–588. [Google Scholar]
- Alexander, P.; Singh, R. Gas turbine engine fault diagnostics using fuzzy concepts. In Proceedings of the AIAA 1st Intelligent Systems Technical Conference, Chicago, IL, USA, 20–22 September 2004; p. 6223. [Google Scholar]
- Joly, R.; Ogaji, S.; Singh, R.; Probert, S. Gas-turbine diagnostics using artificial neural-networks for a high bypass ratio military turbofan engine. Appl. Energy 2004, 78, 397–418. [Google Scholar] [CrossRef]
- Ogaji, S.; Marinai, L.; Sampath, S.; Singh, R.; Prober, S. Gas-turbine fault diagnostics: A fuzzy-logic approach. Appl. Energy 2005, 82, 81–89. [Google Scholar] [CrossRef]
- Marinai, L.; Singh, R. A fuzzy logic approach to gas path diagnostics in Aero-engines. In Computational Intelligence in Fault Diagnosis. Advanced Information and Knowledge Processing; Springer: Berlin/Heidelberg, Germany, 2006; pp. 37–79. [Google Scholar]
- Sampath, S.; Singh, R. An integrated fault diagnostics model using genetic algorithm and neural networks. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2004; Volume 41677, pp. 749–758. [Google Scholar]
- Loboda, I.; Feldshteyn, Y.; Ponomaryov, V. Neural networks for gas turbine fault identification: Multilayer perceptron or radial basis network? In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2011; Volume 54631, pp. 465–475. [Google Scholar]
- Tayarani-Bathaie, S.S.; Vanini, Z.S.; Khorasani, K. Dynamic neural network-based fault diagnosis of gas turbine engines. Neurocomputing 2014, 125, 153–165. [Google Scholar] [CrossRef]
- Yildirim, M.T.; Kurt, B. Aircraft gas turbine engine health monitoring system by real flight data. Int. J. Aerosp. Eng. 2018, 2018, 9570873. [Google Scholar] [CrossRef]
- de Castro Ribeiro, M.G.; Calderano, P.H.S.; Amaral, R.P.F.; de Menezes, I.F.M.; Tanscheit, R.; Vellasco, M.M.B.R.; de Aguiar, E.P. Detection and classification of faults in aeronautical gas turbine engine: A comparison between two fuzzy logic systems. In Proceedings of the 2018 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE) 2018, Rio de Janeiro, Brazil, 3–13 July 2018; pp. 1–7. [Google Scholar]
- Fentaye, A.; Zaccaria, V.; Rahman, M.; Stenfelt, M.; Kyprianidis, K. Hybrid model-based and data-driven diagnostic algorithm for gas turbine engines. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2020; Volume 84140, p. V005T005A008. [Google Scholar]
- Li, Z.; Feng, K.; Yan, B. Dynamic gas turbine condition monitoring scheme with multi-part neural network. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2020; Volume 84140, p. V005T005A007. [Google Scholar]
- Salilew, W.M.; Abdul Karim, Z.A.; Lemma, T.A.; Fentaye, A.D.; Kyprianidis, K.G. Three Shaft Industrial Gas Turbine Transient Performance Analysis. Sensors 2023, 23, 1767. [Google Scholar] [CrossRef]
- Salilew, W.M.; Abdul Karim, Z.A.; Lemma, T.A.; Fentaye, A.D.; Kyprianidis, K.G. Predicting the Performance Deterioration of a Three-Shaft Industrial Gas Turbine. Entropy 2022, 24, 1052. [Google Scholar] [CrossRef]
- Jasmani, M.S.; Li, Y.-G.; Ariffin, Z. Measurement selections for multicomponent gas path diagnostics using analytical approach and measurement subset concept. J. Eng. Gas Turbines Power 2011, 133, 111701. [Google Scholar] [CrossRef]
- Marinai, L. Gas-Path Diagnostics and Prognostics for Aero-Engines Using Fuzzy Logic and Time Series Analysis. Ph.D. Thesis, School of Engineering, Cranfield University, Cranfield, UK, 2004. [Google Scholar]
- Simon, D.L.; Borguet, S.; Léonard, O.; Zhang, X. Aircraft engine gas path diagnostic methods: Public benchmarking results. J. Eng. Gas Turbines Power 2014, 136, 041201. [Google Scholar] [CrossRef]
- Bai, M.; Liu, J.; Ma, Y.; Zhao, X.; Long, Z.; Yu, D. Long short-term memory network-based normal pattern group for fault detection of three-shaft marine gas turbine. Energies 2020, 14, 13. [Google Scholar] [CrossRef]
















| GT Physical Fault | Compressor and Turbine Performance Change Indication | Reference |
|---|---|---|
| Fouling | ↓ Compressor and turbine Γ ↓ Pressure ratio (PR) ↓ Compressor and turbine η | [6,7,8,9,10,11,12,13,14] |
| Erosion | ↓ Compressor Γ ↑ Turbine Γ ↓ Compressor pressure ratio ↓ Compressor and turbine η | [8,15,16,17,18] |
| Corrosion | ↓ Compressor Γ and η ↑ Turbine Γ ↓ Turbine η | [5,16,19,20,21] |
| Blade tip clearance | ↓ Compressor and turbine η ↓ Compressor and turbine Γ | [5,22,23] |
| Foreign and domestic object damage | ↓ Compressor and turbine η ↑/↓ Compressor and turbine Γ ↓ Compressor pressure ratio | [9,16,24] |
| Parameters | Description |
|---|---|
| P24 | LPC exit pressure |
| T24 | LPC exit temperature |
| P3 | HPC exit pressure |
| T3 | HPC exit temperature |
| P43 | HPT exit pressure |
| P47 | LPT exit pressure |
| T5 | PT exit temperature |
| FF | Fuel flow rate |
| N1 | Low-pressure spool speed |
| N2 | High-pressure spool speed |
| Sensor | P24 | T24 | P3 | T3 | P43 | P47 | T5 | FF | N1 | N2 |
|---|---|---|---|---|---|---|---|---|---|---|
| ±σ (%) | 0.25 | 0.4 | 0.25 | 0.4 | 0.25 | 0.25 | 0.4 | 0.5 | 0.05 | 0.05 |
| No | Candidate Algorithms | Description | Category |
|---|---|---|---|
| 1 | Fine Tree |
| Decision Trees |
| 2 | Medium Tree |
| |
| 3 | Coarse Tree |
| |
| 4 | Kernel Naïve Bayes |
| Naïve Bayes Classifiers |
| 5 | Linear Support Vector Machine |
| Support Vector Machine |
| 6 | Quadratic Support Vector Machine |
| |
| 7 | Cubic Support Vector Machine |
| |
| 8 | Fine Gaussian Support Vector Machine |
| |
| 9 | Medium Gaussian Support Vector Machine |
| |
| 10 | Coarse Gaussian Support Vector Machine |
| |
| 11 | Fine K-Nearest Neighbor |
| Nearest Neighbor Classifiers |
| 12 | Medium K-Nearest Neighbor |
| |
| 13 | Coarse K-Nearest Neighbor |
| |
| 14 | Cosine K-Nearest Neighbor |
| |
| 15 | Cubic K-Nearest Neighbor |
| |
| 16 | Weighted K-Nearest Neighbor |
| |
| 17 | Support Vector Machine Kernel |
| Kernel Approximation Classifier |
| 18 | Logistic Regression Kernel |
| |
| 19 | Boosted Trees Ensemble |
| Ensemble Classifiers |
| 20 | Bagged Trees Ensemble |
| |
| 21 | Subspace Discriminant Ensemble |
| |
| 22 | Subspace KNN Ensemble |
| |
| 23 | RUSBoosted Trees Ensemble |
| |
| 24 | Narrow Neural Network |
| Neural Network |
| 25 | Medium Neural Network |
| |
| 26 | Wide Neural Network |
| |
| 27 | Bi-layered Neural Network |
| |
| 28 | Tri-layered Neural Network |
|
| Candidate Algorithms | Accuracy [%] | Rank |
|---|---|---|
| Narrow Neural Network | 98.62 | 1 |
| Cubic Support Vector Machine | 98.44 | 2 |
| Tri-layered Neural Network | 97.89 | 3 |
| Wide Neural Network | 97.80 | 4 |
| Bi-layered Neural Network | 97.80 | 5 |
| Medium Neural Network | 97.71 | 6 |
| Fine KNN | 97.06 | 7 |
| Quadratic SVM | 96.88 | 8 |
| Weighted KNN | 96.79 | 9 |
| Bagged Trees | 96.70 | 10 |
| Fine Gaussian SVM | 95.60 | 11 |
| Subspace KNN | 95.14 | 12 |
| Linear SVM | 93.95 | 13 |
| Boosted Trees Ensemble | 93.77 | 14 |
| Medium Gaussian SVM | 93.68 | 15 |
| Medium KNN | 93.68 | 16 |
| Cubic KNN | 93.40 | 17 |
| SVM Kernel | 93.40 | 18 |
| Cosine KNN | 92.94 | 19 |
| Fine Tree | 92.85 | 20 |
| Logistic Regression Kernel | 89.37 | 21 |
| Coarse Gaussian SVM | 83.79 | 22 |
| RUSBoosted Trees | 82.60 | 23 |
| Medium Tree | 82.50 | 24 |
| Subspace Discriminant | 81.59 | 25 |
| Kernel naïve bays | 79.76 | 26 |
| Coarse KNN | 72.25 | 27 |
| Coarse Tree | 35.80 | 28 |
| Algorithms Type | Accuracy [%] | Rank |
|---|---|---|
| Narrow Neural Network | 98.62 | 1 |
| Candidate Algorithms | Accuracy [%] | Rank |
|---|---|---|
| Medium Neural Network | 98.12 | 1 |
| Wide Neural Network | 97.31 | 2 |
| Cubic SVM | 97.27 | 3 |
| Fine KNN | 96.86 | 4 |
| Bagged Trees | 96.64 | 5 |
| Quadratic SVM | 96.27 | 6 |
| Weighted KNN | 96.25 | 7 |
| Narrow Neural Network | 94.41 | 8 |
| Fine Gaussian SVM | 93.96 | 9 |
| Subspace KNN | 93.94 | 10 |
| Bilayered Neural Network | 90.55 | 11 |
| Cubic KNN | 90.14 | 12 |
| Medium KNN | 90.06 | 13 |
| Linear SVM | 90.05 | 14 |
| Cosine KNN | 89.31 | 15 |
| SVM Kernel | 87.52 | 16 |
| Medium Gaussian SVM | 86.04 | 18 |
| Trilayered Neural Network | 79.92 | 19 |
| Logistic Regression Kernel | 75.46 | 20 |
| Coarse Gaussian SVM | 70.23 | 21 |
| Coarse KNN | 67.67 | 22 |
| Kernel Naïve Bayes | 61.99 | 23 |
| Subspace Discriminant | 58.20 | 24 |
| Fine Tree | 54.71 | 25 |
| Boosted Trees | 38.25 | 26 |
| RUSBoosted Trees | 27.29 | 27 |
| Medium Tree | 26.67 | 28 |
| Coarse Tree | 8.02 | 29 |
| Algorithms Type | Accuracy [%] | Rank |
|---|---|---|
| Medium Neural Network | 98.12 | 1 |
| Single Faults Detection and Isolation | Double Faults Detection and Isolation | |||||
|---|---|---|---|---|---|---|
| 80% Load | 90% Load | 100% Load | 80% Load | 90% Load | 100% Load | |
| Validation accuracy | 99.6% | 99.8% | 99.8% | 99.4% | 99.3% | 99.5% |
| Test accuracy | 98.9% | 98.2% | 98.9% | 98.7% | 98.4% | 98.1% |
| Single Faults Detection and Isolation | Double Faults Detection and Isolation | |||||
|---|---|---|---|---|---|---|
| 80% Load | 90% Load | 100% Load | 80% Load | 90% Load | 100% Load | |
| Training accuracy | 99.14% | 98.08% | 96..79% | 96.86% | 96.79% | 96.35% |
| Validation accuracy | 98.88% | 97.87% | 96.75% | 96.82% | 96.75% | 96.31% |
| Test accuracy | 97.67% | 96.77% | 96.63% | 96.74% | 96.63% | 95.98% |
| All accuracy | 98.86% | 97.87% | 96.76% | 96.83% | 96.76% | 96.28% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salilew, W.M.; Gilani, S.I.; Lemma, T.A.; Fentaye, A.D.; Kyprianidis, K.G. Simultaneous Fault Diagnostics for Three-Shaft Industrial Gas Turbine. Machines 2023, 11, 832. https://doi.org/10.3390/machines11080832
Salilew WM, Gilani SI, Lemma TA, Fentaye AD, Kyprianidis KG. Simultaneous Fault Diagnostics for Three-Shaft Industrial Gas Turbine. Machines. 2023; 11(8):832. https://doi.org/10.3390/machines11080832
Chicago/Turabian StyleSalilew, Waleligne Molla, Syed Ihtsham Gilani, Tamiru Alemu Lemma, Amare Desalegn Fentaye, and Konstantinos G. Kyprianidis. 2023. "Simultaneous Fault Diagnostics for Three-Shaft Industrial Gas Turbine" Machines 11, no. 8: 832. https://doi.org/10.3390/machines11080832