1. Introduction
In recent decades, robot manipulators have been increasingly utilized for various manipulation tasks. In particular, part insertion, e.g., USB port and socket, figures in both daily life and industrial settings [
1]. These scenarios highlight the potential of robots in handling contact-rich manipulation tasks. However, the interaction between robots and objects involving contact force is complex, which can lead to manipulation failure, and even damage the device [
2]. Hence, it becomes challenging for robot manipulator planning and control [
3]. One specific challenge arises from the limitations of visual uncertainty [
4], which is widely used in robotic systems. For instance, the vision information cannot always perform well in contact-rich tasks, since some inaccurate pose estimation may cause planning in a mismatch trajectory and finally, failure in an experiment [
2]. Therefore, there are difficulties for robots to find a solution for contact-rich tasks, particularly when robotic systems rely solely on vision-based guidance. In order to address this challenge, researchers are exploring the integration of vision sensors with force feedback information [
5].
Researchers have proposed many learning-based methods to complete such contact-rich tasks. However, there still exist notable challenges because of the requirement for a substantial amount of sampling and exploration to gather sufficient data [
1]. For instance, Levine et al. [
6] deployed numerous robot manipulators in the real world, which is time-consuming and expensive. Alternatively, some other researchers prefer training in the simulator to prepare learning-based algorithms; this methodology works depending on the situation [
7]. For example, Blender can only easily simulate kinematics motion of a robot. On the other hand, when dynamics are required, Bullet is widely used for its collision detection, which is a point-contact model. Open Dynamics Engine (ODE) is the default engine of Gazebo, which is famous for its fast calculating speed, but the accuracy is low. Chrono [
8] mainly focuses on mobility simulation. MuJoCo [
9] is similar to Bullet but has better speed and accuracy. PhysX also focuses on speed instead of accuracy, and is mainly used in video games. Isaac [
10] utilizes this engine and is also famous for generating simulated images in a virtual world. Indeed, it is cost-efficient to use the simulators above in non-contact tasks or relatively simple contact tasks. However, as the complexity of contact increases, these simulators may fail or introduce distortions due to inaccurate contact feedback, which means there still exists a significant sim-to-real gap [
1]. For instance, an algorithm can be trained with even 100 percent success rate in simulators but still meet failures when deployed into real applications [
11]. Alternatively, some researchers are addressing the issue by pursuing highly accurate contact models, such as ANSYS with finite element analysis (FEA) techniques [
12]. However, it is impractical to execute training and learning through ANSYS due to the long calculation time associated with FEA. Furthermore, a data-driven method can also be utilized to model contact mechanics. For instance, Peng et al. [
13] and Ma et al. [
14] utilize neural networks, inputting a substantial amount of real-world data, to accurately regress contact mechanics. However, these approaches may lack the capability to generalize the contact mechanics to any user-defined scenario with varying parameters and geometry shapes. Gathering a comprehensive dataset covering all possible cases can be challenging. Consequently, achieving a balance between accuracy and efficiency remains a challenge when gathering data for contact-rich tasks. It is crucial to find alternative approaches that can accelerate the data collection process without sacrificing accuracy.
Motion planning plays a pivotal role in robotics contact-rich insertion to ensure a safe path to the desired position. Classical motion planning can be divided into these three categories: classical approaches, heuristic approaches, and graph search approaches [
15]. Classical approaches, such as potential field, have been traditionally used in motion planning. However, these methods often suffer from limitations in terms of global optimization and robustness. Heuristic exploration can overcome this disadvantage to some extent. Graph Search, such as Astar, is inefficient in complex environments. Moreover, these motion planning algorithms always focus on collision-free motions [
16] which are not suitable for complex contact-rich tasks.
Moreover, optimization plays a crucial role in assisting robots to find the best trajectory under specific criteria or constraints, and optimization is widely used in robot planning [
2]. For instance, Wang et al. [
17] utilize classical optimal control techniques for trajectory planning on a flight deck, which focuses on a collision avoidance problem. However, classical optimization methods may struggle with multi-modal or high-order nonlinear problems [
18], because in the real world, contact dynamics is inherently nonlinear and complex, making it challenging to model the contact-rich tasks. The challenge stems from the complexity involved in creating an analytical model that accurately represents the dynamics of contact [
19]. Indeed, to address these challenging problems, researchers propose many advanced optimization algorithms. Kurtz et al. [
20] take an implicit contact force into account, which is computed at each time step. To specify, they use Iterative Linear Quadratic Regulator (iLQR) to optimize this contact-implicit trajectory. Wei et al. [
21] optimizes robot position, speed, and torque, which are used for virtual spring to keep a minimal impedance force and vibration by the forgetting factor function. Moreover, some researchers combine bilevel optimization which combines multiple layers of optimization methods for one optimization problem. For instance, Stouraitis et al. [
22] employed a bilevel optimization approach that combines graph search and trajectory optimization to accomplish a collaborative task. Furthermore, robot learning with policy parameterization also utilizes optimization, where policy optimization consists of derivative free/evolutive (e.g., BBO) and policy gradients (e.g., REINFORCE [
23]), and dynamic programming, consisting of policy iteration and value iteration. For example, Suomalainen et al. [
3], summarized robot learning methods in contact tasks, including Learning from Demonstration (LfD) and Reinforcement Learning (RL). LfD, such as Gaussian mixture models (GMM) and Gaussian mixture regression (GMR), enable the robot to learn from the demonstrated trajectories provided by human experts. Enayati et al. [
24] use GMM to encode human demonstrations and use GMR to generate trajectory, where the policy is parameterized and optimized. However, the original solution of GMM and GMR cannot deal with contact-rich tasks well, which can be improved by RL. For example, an expert’s demonstration can be used as a starting point for RL-based policy optimization and minimize the difference between robot and expert [
25]. Furthermore, DMPs are widely and popular used in policy parameterization [
26], which can be optimized. For instance, Abu-Dakka et al. [
4] propose making use of human demonstration to get a peg-in-hole task encoded by DMPs, which helps the robot come to new tasks without new coding.
Peg-in-hole assembly covers many specifics of common contact-rich tasks in various real-world applications. Due to their practical relevance and complexity, numerous researchers have focused their efforts on this. For instance, Whitney et al. [
27] consider the whole insertion as quasi-static, then use Newton’s law to derive the relation between contact force and pose of peg. Pitchandi et al. [
28] also refer to Whitney’s work, but add viscoelastic property of compliant material into consideration and derive the appropriate device with optimal stiffness and damping parameters. When the exact pose of hole is uncertain, Lee et al. [
29] use a quasi-static model to derive where the hole is based on feedback friction force and geometry of peg. They divide the task into many phases separately. Wu et al. [
30] also use equilibrium condition; they focus on robot assembly of circular-rectangular compound peg and hole parts, and use flow chart of hole searching, whose essence is a super if-else machine. Salem et al. [
31] insert the hole to the fix peg using quasi-static model by deriving two-point and three-point contact static equations. They also define the assembly sequence by approaching two-point contact, adjusting the direction based on force feedback, until they reach a stable three-point contact phase. However, a geometry method [
3] can also work for contact-rich tasks. However, a for geometry method, we need the shape of objects and the environment. Therefore, it is hard to build an analytical model for contact [
32].
The contributions of our work are several-fold. Firstly, we enhance the accuracy of simulation by employing the hydroelastic model, which has the potential to reduce the sim-to-real gap. We validate the hydroelastic model against a benchmark to demonstrate its effectiveness. Secondly, we propose a bilevel framework that combines DMPs and BBO, utilizing a hydroelastic model, while this framework incorporates contact force information into the optimization process. Thirdly, we address the inherent uncertainty in visual perception to some extent by introducing noise into the cost function. This allows our framework to adapt to visual uncertainty.
The remaining sections of this paper are structured as follows.
Section 2 offers a comprehensive model description and introduces the well-established Whitney’s theory. Subsequently, a comparative analysis between the hydroelastic model and Whitney’s theory is conducted to assess their performance and identify disparities. In
Section 3, our proposed bilevel framework is presented. We explain the methodology that combines DMPs and BBO with the hydroelastic model. This approach aims to tackle the challenges posed by visual uncertainty, which often proves to be a significant obstacle in conventional robot planning solutions.
Section 4 concludes the paper and outlines avenues for future research.
2. Dynamics Model and Hydroelastic Model
In this section, we first introduce the peg-in-hole scenario. Next, we present a concise mathematical description of our scenario, and introduce the benchmark proposed by Whitney [
27]. Subsequently, we extract the curves containing contact force and kinematics information to compare with Whitney’s benchmark. By conducting this comparison, we evaluate the accuracy of the hydroelastic model while also identifying its shortcomings. This evaluation can guide us in effectively utilizing the hydroelastic model.
2.1. Dynamic Model
We utilize a hydroelastic model supported in DRAKE [
33], a simulator that considers surface contact and offers fast calculation speeds. In our scenario, a virtual robot guides the peg towards a hole, accounting for friction. The term “virtual robot” refers to a robot lacking a physical body but possessing kinematic properties. Meanwhile, a spring connects the ghost robot and peg, as depicted in
Figure 1. The initial frame of the peg remains fixed, while users can set the initial frame of the hole, assuming the robot is equipped with sensors, such as a camera, to perceive the pose of the hole. Consequently, the target pose of the peg is known but subject to noise. Therefore, the motion of the peg only depends on the force exerted by the robot and the contact force between the peg and hole. Whenever the contact between peg and hole occurs, the hydroelastic model will generate a surface contact force acting on the peg.
We account for the interaction between robot and peg via a simple linear spring model. Therefore, the force applied on the peg is generated by a spring, which only depends on the pose difference between the robot frame
and peg top center
, Numerically, we make use of a simulator, (DRAKE [
33]) depicted in
Figure 2, to obtain discrete-time evaluation of the dynamics captured by:
which denotes the position, velocity, and acceleration of the peg which can be generated by this simulator with inputting the pose of the peg at the previous time step, pose of the robot, and models. Ultimately, a successful insertion is achieved when the distance between the bottom surface center of the peg
and the frame of the hole
is sufficiently close. This criterion determines whether the peg has been successfully inserted into the hole.
2.2. Compliant Interaction
As previously mentioned, it is essential for the robot to apply a force onto the peg during the peg-in-hole task. Here, we shall assume a compliant interaction between robot and peg which, in turn, will allow to evaluate interaction forces from pose differences.
Figure 1 illustrates the scenario we are considering, where
represents the frame of center of the peg. In addition, we utilize a rotation matrix
and transformation matrix
to represent the peg frame
in the world coordinate system.
where the general rotation matrix is
Similarly, we employ the same definitions for the robot frame
and hole frame
. Furthermore, we introduce two additional frames to define the top surface center of the peg
and bottom surface center of the peg
. Assuming the peg is a fixed rigid body, we can consider the transformation matrix for
in
to be constant. The length of the peg is symbolized as
l,
equals
The transformation matrix of
can be expressed as
We employ a function
to extract a vector
to describe
, where
The relative distance between frame
and frame
is written as
.
where
denote positions,
denotes orientation. Next, we model the interaction between robot and peg by considering three springs with stiffness coefficients
connecting frame
and frame
, Additionally, we define the spring between peg and robot in Cartesian space using stiffness matrix
:
Therefore, the elastic interaction between robot and peg can be accounted for by the following energy function
The elastic (interaction) force exerted by the robot onto the peg
can be derived as
2.3. Classical Whitney’s Model
Previous derivations are based on a series of simplifying assumptions. In order to verify the realism of such a model, we will benchmark it with classical quasi-static assembly results. Whitney [
27] introduced a quasi-static assembly theory for rigid parts utilizing compliant supports, which has undergone comparison with real-world experiments. Their methodology has demonstrated accuracy, making it highly valuable for comparative analysis.
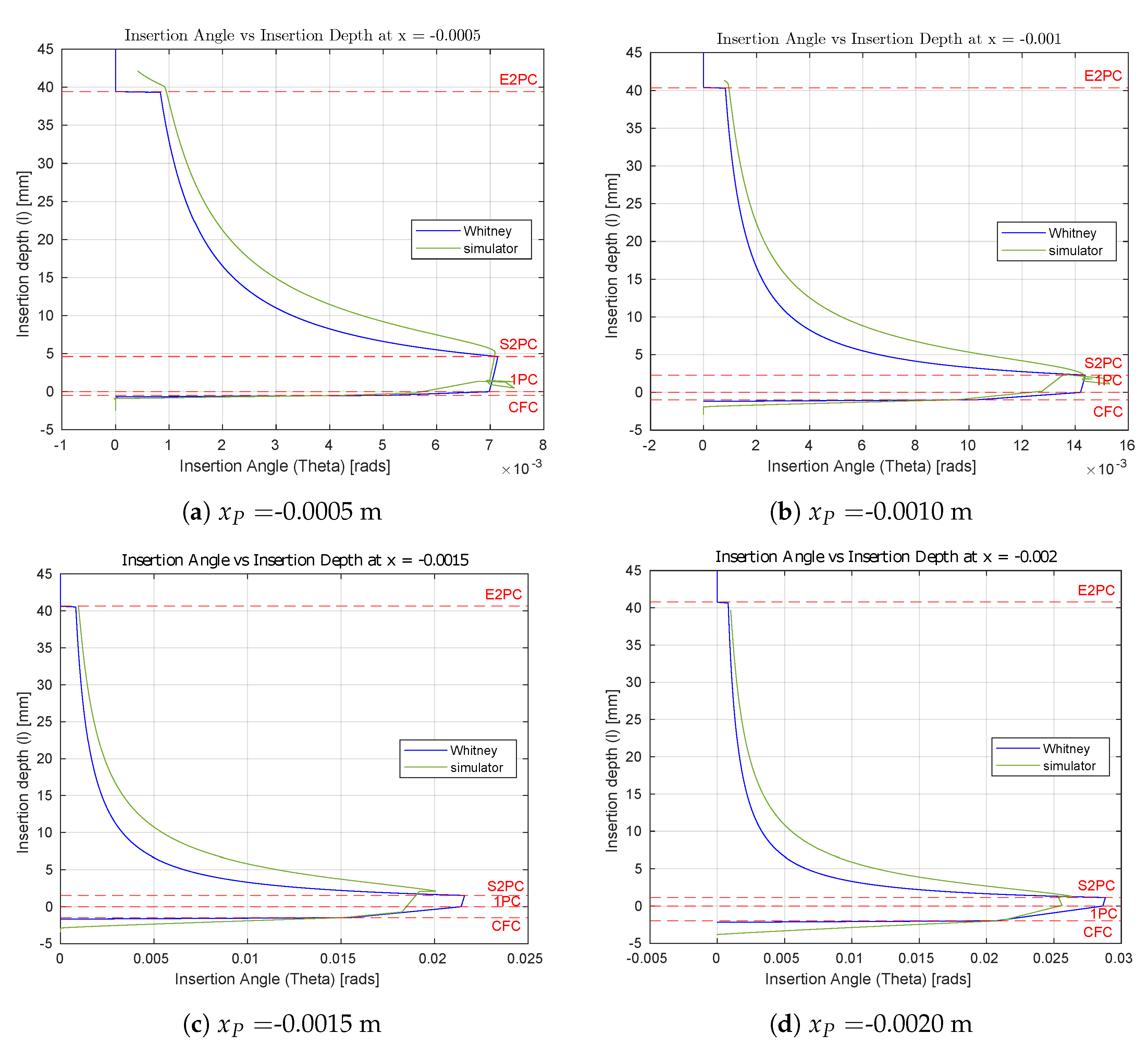
The derivations in the paper involve modelling the compliant supports as springs and deriving equations to describe the forces and displacements during assembly. By analyzing the equilibrium conditions of the system, the derived equations enable predicting the behavior of the parts and supports, offering a flexible approach to assembly processes. Typical insertion geometry has an insertion event with these stages shown in
Figure 3: approach, chamfer crossing, one-point contact, and two-point contact.
Given the stiffness
,
, friction coefficient
and compliance center
with the peg and hole geometrical parameters (such as its initial angular error
, initial lateral error
,
c clearance ratio), the insertion forces
,
and insertion angles
can be calculated from the derived analytical equations in
Table 1.
2.4. Comparison between Hydroelastic Model and Whitney’s Theory
To facilitate a comparison, we build models and frame based on Whitney’s work [
27] within the DRAKE simulator. It is important to note that in this case the peg is moving downward slowly with only a vertical velocity as it approaches the hole.
Furthermore, for defining the material properties of peg and hole in the simulator, we refer the DRAKE’s manual [
33], which provides guidelines on how to set parameters that correspond to the physical characteristics and behavior of the materials used in the contact-rich tasks. According to the suggestions, we set the hydroelastic modulus same as Young’s modulus. Assuming the peg and hole are both made of steel, we set the hydroelastic modulus as 200 GPA [
34]. Then, we set the friction coefficient as 0.6, and Hunt–Crossley dissipation as
, which is responsible for the energy-damping property. In order to minimize undesired oscillations of the model during contact, we choose a heuristic value for this parameter.
To facilitate a direct comparison between Whitney’s results and the results obtained from the hydroelastic model, we log the contact force and other information by using the same scenario. All simulations were performed on a desktop with an Intel i9 processor and 32 GB RAM.
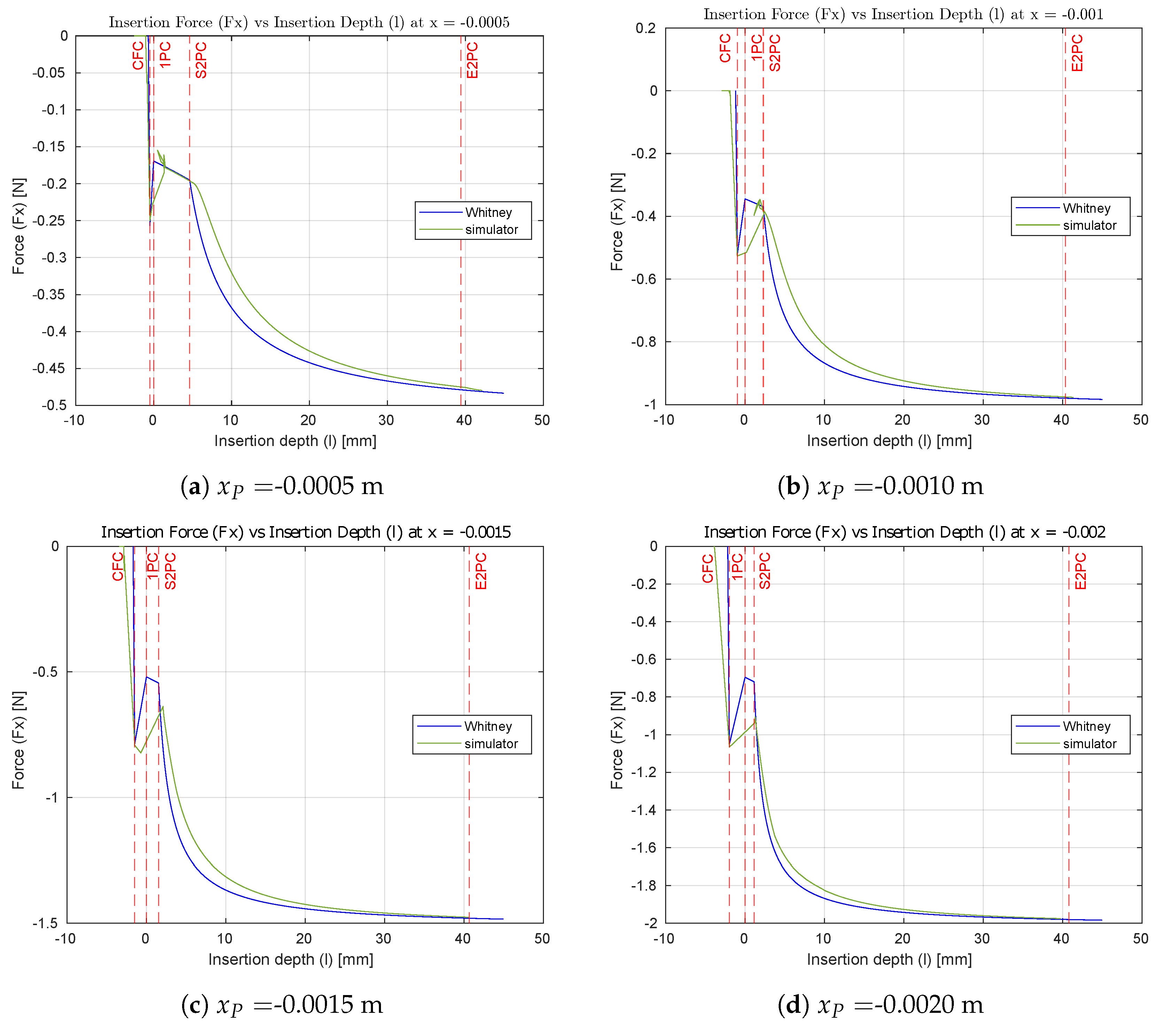
We are evaluating the quality of the hydroelastic contact model, with the contact force as the performance indicator. Thus, we plot the variation of the contact force with insertion depth. The results are shown in
Figure 4 (further results are also reported in
Appendix A). We vary the starting position
of the peg, which corresponds to changing the horizontal distance or offset between the central line of the hole and the peg. From
Figure 4, we observe that the hydroelastic model exhibits the same phases as observed in Whitney’s method, albeit with some difference. In the hydroelastic model [
33], the horizontal contact force
in the peg frame gradually increases during the chamfer contact phase, rather than experiencing a sudden force at the initial contact. As the peg penetrates deeper into the hole, the contact force gradually builds up. After leaving the chamfer phase, there are some oscillations. Subsequently, the peg transitions to one-point contact phase; the value of contact force decreases, then increases, which aligns with Whitney’s theory. Finally, during two-point contact phase, we observe that the behavior of the hydroelastic model closely resembles Whitney’s theory. The final contact force values converge to very similar values in both the hydroelastic model and Whitney’s theory.
Based on the depicted figures, it is apparent that the hydroelastic model consistently reproduces results that closely align with those of Whitney’s theory, even when the starting points are altered. The three figures exhibit similar trends and characteristics, thereby supporting the similarity between the hydroelastic model and Whitney’s theory; additional results can be found in
Appendix A.
We evaluated the relative error at various contact phases for the four situations, and the results are presented in
Table 2.
Some relative errors are small, within
, and the majority of other features are within
. However, a few of them exhibit larger relative errors, approximately around
. Additionally, it may be emphasized that to get a more comprehensive understanding of how Whitney’s results compared with hydroelastic model’s results, we need to look at the data throughout the contact task, not just some peak values (as reported in
Table 2). Therefore, we introduce this Pearson correlation coefficient to report the overall relationship between the two datasets, denoted as
r, which is presented in
Table 3. The Pearson correlation coefficient measures the strength and the direction of a linear relationship between Whitney’s theoretical result and the hydroelastic model’s result with possible values between −1 and 1, where a higher value of
r indicates a stronger relationship between the two sets of data. Furthermore, the Pearson correlation coefficient can serve as a quantitative measure to assess the extent to which performance in simulations corresponds to performance in the real world [
35]. Therefore, we present the linear relationship between Whitney’s theory and the hydroelastic model by
and
at the same insertion depth (after alignment) in
Figure 5a,b. In other words, each curve represents the simulated force versus the theoretical force throughout the entire insertion process, with each point plotted at the corresponding shifted insertion depth. We plot a total of four cases, each corresponding to different offsets. Subsequently, we calculate
r in
Table 3. We can observe that there exists a strong linear relationship between the variables, and some curvatures are caused by the oscillation during contact.
The hydroelastic model demonstrates several advantages. Firstly, it accurately captures the values of the contact force during both the sudden contact and final stable phases, with some relative errors even less than . Secondly, the overall trend of results obtained from the hydroelastic model closely aligns with Whitney’s theory, which can be proved by ; both of them are over .
However, there are two limitations from the results. Firstly, oscillation occurs when the peg abruptly leaves the chamfer phase. This can be attributed to the virtual spring between robot and peg, which can be considered as stiffness control. When a sudden force disturbs the system, it will result in an oscillation. In this case, when the robot exerts sufficient force to the peg, the peg will suddenly slip off the chamfer and the oscillation phenomenon occurs.
Secondly, there always exists a depth domain delay no matter whether during the chamfer crossing or two-point contact phase. To account for this delay, we shift the results generated by the hydroelastic model based on the depth axis. This is because the contact force arises linearly after instantaneous contact, which is caused by the theory of hydroelastic contact [
33]. The insertion depth and contact force will both continue increasing until the two bodies achieve quasi-static force equilibrium. Therefore, as sudden insertion occurs, we observe a progressive increase in contact force corresponding to the increasing insertion depth, while Whitney’s theory makes the contact force suddenly arise. Thus, there exists a depth–domain disparity between these two curves, which explains these curves of the contact results. In plotting
Figure 4 and calculating the Pearson correlation coefficient, we aligned the curves based on the peak of first contact force due to the depth domain delay phenomenon. Otherwise, this delay will result in a low Pearson correlation coefficient.
To summarize, the results indicate that the hydroelastic model is capable of accurately simulating the contact-rich behavior, especially with a slow motion that meets quasi-static, and successfully reproducing key characteristics in Whitney’s theory, which have already been verified through real-world experiments. Although Whitney’s theory is accurate and mature, it fails to account for deformation during contact and lacks the ability to generalize to complex scenarios (e.g., USB port). In other words, when dealing with intricate object shapes, applying Whitney’s theory becomes challenging due to the consideration of numerous edges. Consequently, the hydroelastic model not only addresses both deformation and generalization, but also aligns well with Whitney’s theory. A user can easily apply the hydroelastic model to any geometry, making it a versatile tool with the potential to support a wide range of application scenarios and provide valuable explanations for real-world contact tasks.
4. Conclusions
This paper presents a bilevel optimization framework utilizing DMPs and BBO with a hydroelastic contact model for peg-in-hole tasks. Our research has yielded several key findings. Firstly, we have demonstrated that the hydroelastic model accurately reproduces the essential characteristics of Whitney’s theory for a peg-in-hole task. Secondly, we have validated the feasibility of our framework for a peg-in-hole task under visual uncertainty. Thirdly, we have established that conventional planning methods, e.g., one-level optimization, are susceptible to failure in contact-rich tasks due to visual uncertainty. In contrast, our bilevel framework has the capability to overcome visual uncertainty and successfully insert the peg.
Through comparison with Whitney’s theory, we have observed that the hydroelastic model generates results with similar features during each contact phase. Notably, the characteristic results achieve and . Furthermore, our findings indicate that the hydroelastic model is accurate, with some relative error even less than when motion is slow. The results above prove that the hydroelastic model is a good fit for Whitney’s theory, thereby offering potential for reducing the sim-to-real gap. However, when motion is rapid, such as at the sudden contact, the contact force cannot be instantaneously generated. Instead, the surface contact force gradually increases until two complaint bodies reach equal pressure. Therefore, we have also noted the presence of a depth delay phenomenon due to the property of the hydroelastic model.
Our investigations into the bilevel framework with DMPs and BBO have revealed that policy parameterization is a useful and efficient method, where 50 iterations with 10 rollouts can be completed in 10 min. Meanwhile, bilevel optimization guides peg approach to hole with different phases during iteration, which can be logically explained and justified. Specifically, the explored goal for DMPs supported by the outer level has successfully mitigated the visual uncertainty and achieved superior planning trajectories compared with using sensed information directly, where the mean cost of directly using inaccurate hole diverges. Furthermore, our solution demonstrates the ability to achieve successful insertion within 50 iterations across a wide range of starting positions. This showcases the superior performance and reliability of our approach.
For ongoing and future work, we attempt to transfer this planning policy to the real world and test how the hydroelastic model bridges the sim-to-real gap. Additionally, we intend to investigate a more robust framework that can further enhance the effectiveness and reliability of our approach. Moreover, it is worth discussing the generalization of our framework to be applicable to flexible materials. Incorporating another simulator specialized in modeling flexible materials could prove beneficial in extending the versatility of our approach.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}