1. Introduction
The tractor is a major agricultural machine that performs tasks such as plowing, harrowing, fertilizing, harvesting, and hauling through attachments. Tractors account for the highest share of the global agricultural equipment market, 35%, and the tractor market size is expected to grow to
$69 billion by 2029 [
1]. Due to the recent high interest in automated agricultural machinery, many studies on tractor automation technology have been performed [
2]. In particular, advances in communication and sensor technology have facilitated the rapid development of automation technology for agricultural machinery [
3]. The utilization of these automated agricultural machines makes it possible to secure agricultural productivity and carry out highly efficient agricultural work [
4]. The autonomous tractor market is expected to grow to
$8.3 billion by 2028 [
5].
One of the major features of autonomous tractors is auto-steering. The significance of precise steering in agricultural operations has been highlighted [
6]. If steering control is not properly conducted, problems such as lowered work efficiency or deviation from the route may occur [
7]. The performance of the steering system is important for precise steering of the tractor. Most tractors utilize hydraulic power steering systems, as they are more reliable than electric motor power steering (EPS), especially in agricultural machinery that is often exposed to large and fluctuating loads [
8]. In such a hydraulic system, steering performance may be reduced due to factors such as fluid non-linearity and tractor vibrations. The nonlinearity in hydraulic systems arises from fluid incompressibility, friction, and hydraulic valve characteristics and significantly impacts system performance and control [
9]. Additionally, tractors operating in rough road conditions generate intense vibrations, which can lead to vibration of the valve control elements such as the spool, resulting in pressure pulsation [
10]. To overcome these limitations and develop a high-performance steering system, an electrohydraulic steering system has been developed. The application of electrohydraulic steering systems in agricultural and construction machinery has been extensively studied, and significant research has been conducted on the development of embedded control systems for achieving high performance [
11]. The electrohydraulic steering system, employed in auto-steering tractors, determines the steering direction and flow rate using an electrohydraulic proportional directional control valve (EHPV). EHPVs have been extensively employed to implement the precise performance of agricultural machinery. The performance of the EHPV directly influences the performance of the electrohydraulic steering system [
12]. Thus, the development of high-performance EHPV is important for the stability and efficiency of the automatic steering system for high-power tractors.
Research on EHPVs employed in agricultural machinery has been performed by several researchers around the world. These works include studies on the major tractor components such as a front loader [
13], the power shuttle system [
14], the hitch controller [
15,
16], and the transmission [
17]. Most related studies focused on the development of valve control algorithms. The primary aim of these studies was to enhance control response speed and accuracy through the development of control algorithms. Bo et al. (2018) developed a mathematical model of EHPV considering the nonlinearity of the hydraulic system and evaluated the static and dynamic characteristics [
18]. The dynamic characteristics of EHPVs are obtained under conditions such as abnormal signal input and disturbance by the tractor hydraulic system. By understanding the dynamic characteristics of EHPV, the performance of EHPV in actual tractor operation can be predicted. When EHPV is tested on an actual tractor or a test device capable of realizing actual working conditions, changes in dynamic characteristics according to the working conditions of the tractor can be analyzed. Lee et al. (2022) developed a steering algorithm through the hardware-in-the-loop (HIL) test to identify the dynamic characteristics of a tractor hydraulic system [
8]. The results of the study demonstrated that the development of a steering algorithm can effectively improve the nonlinearity of EHPV. In addition, the use of the EHPV showed less steering control error and faster response compared to the use of EPS. However, prior research on the measurement of dynamic characteristics and performance evaluation of the EHPV considering various tractor working conditions is insufficient. For the development of high-performance EHPVs, it is necessary to measure the hydraulic characteristics of the EHPV mounted on an actual tractor under working conditions.
In the field of heavy vehicles, studies on the performance of EHPVs for each working condition have already been carried out. Heavy vehicles are also similar to tractors in that they apply EHPVs for stability against high loads. Xia et al. (2016) evaluated the flow rate, pressure, and spool displacement characteristics of EHPVs based on the driving speed and steering angular velocity of the vehicle [
19]. EHPV performance was evaluated by developing a mathematical model of the vehicle steering system through the analyzed data. The developed model shows that application of the EHPV provides a better high-speed steering feel than using conventional hydraulic power steering. In addition, the hydraulic characteristics of valves are used as indicators for valve design optimization. Li et al. (2020) presented optimized valve core displacement, spring stiffness, and core–shell structure so that the valve flow rate was output within the tolerance range for the design flow rate [
20]. These preceding studies show that EHPV performance prediction and design optimization can be realized through EHPV hydraulic characteristics analysis.
Nevertheless, analyzing the hydraulic characteristics of EHPV during the practical agricultural operations of tractors poses significant challenges. Unlike other commercial vehicles, tractors operate on uneven soil road surfaces. The performance of tractors working in soil is influenced by various soil variables, including moisture content, soil texture, and soil strength [
21]. This introduces challenges in controlling experimental conditions. Moreover, as tractors engage in tasks such as tillage that involve direct interaction with the soil, the impact of soil becomes more pronounced [
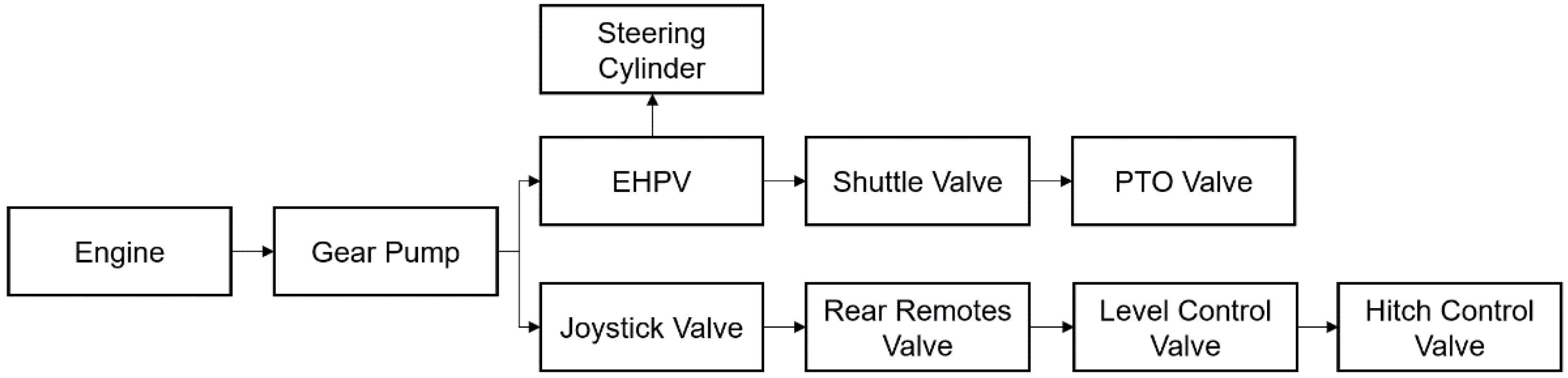
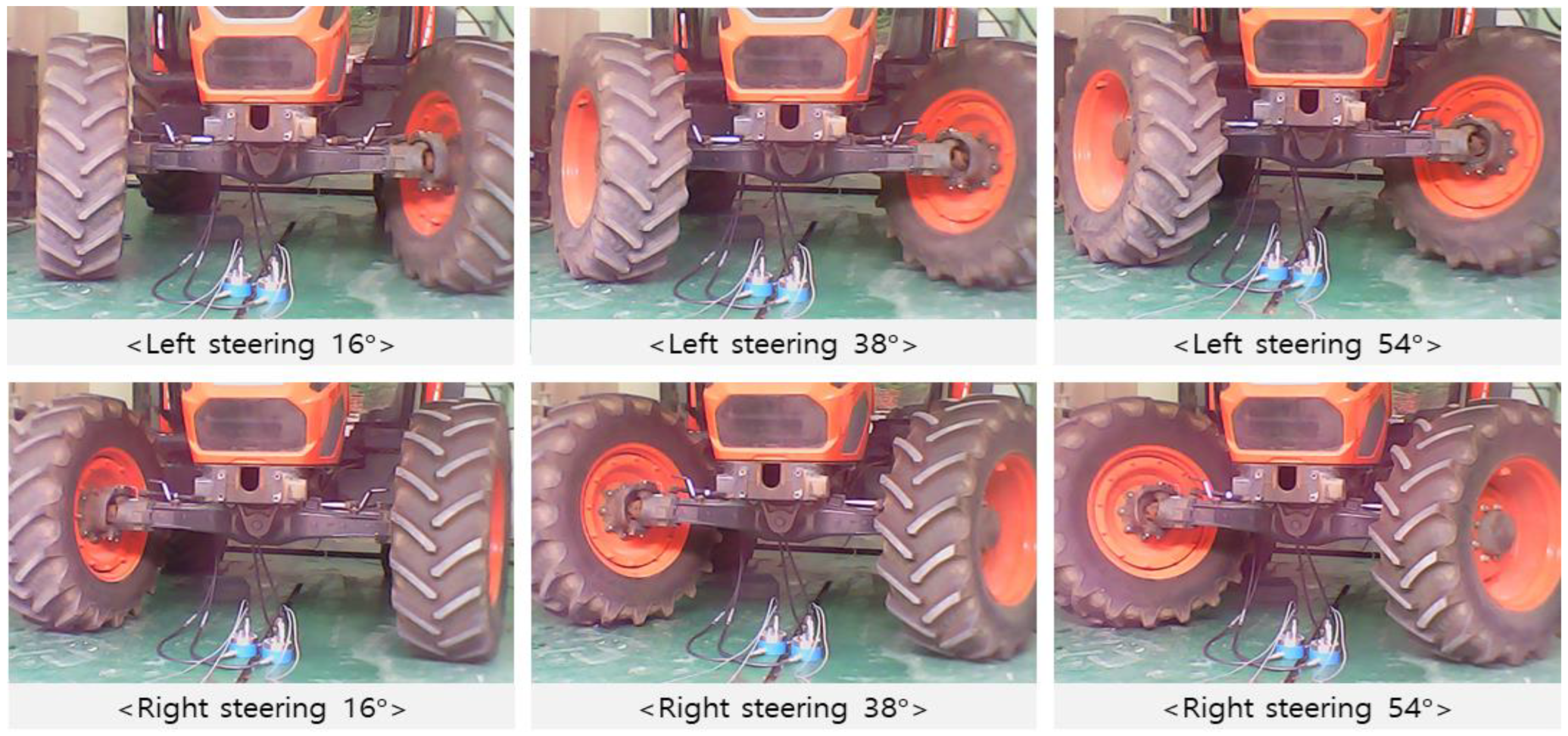
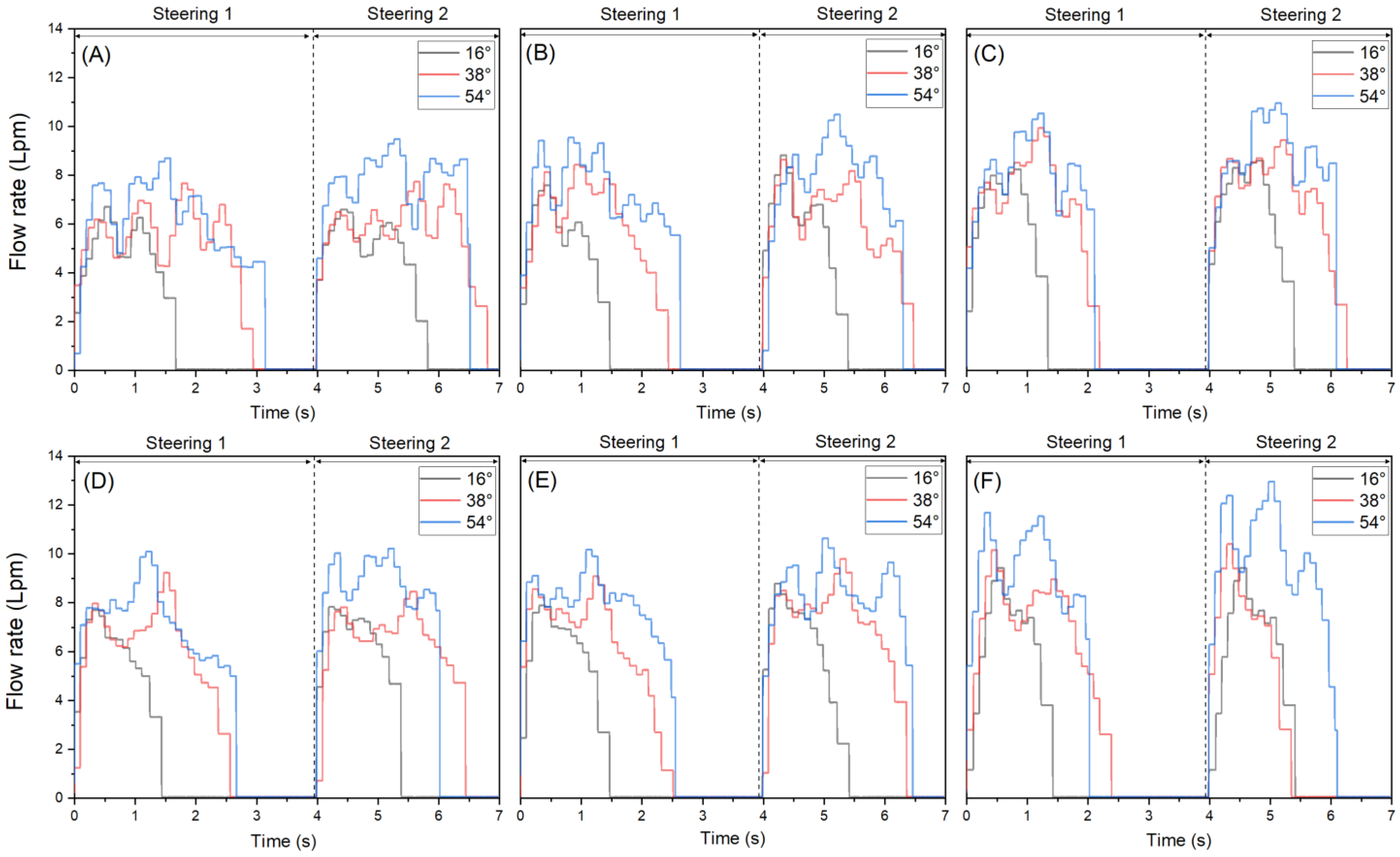
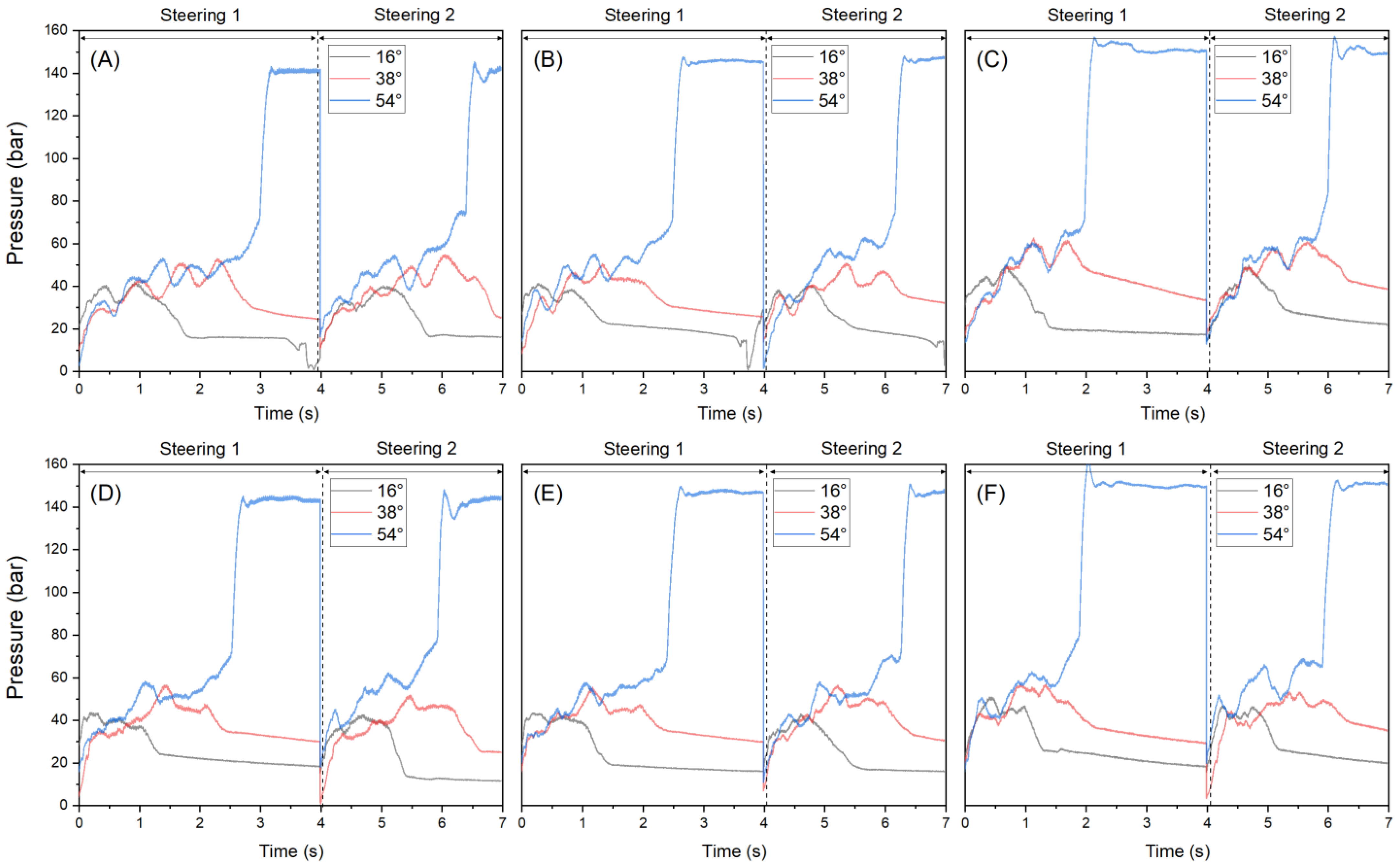
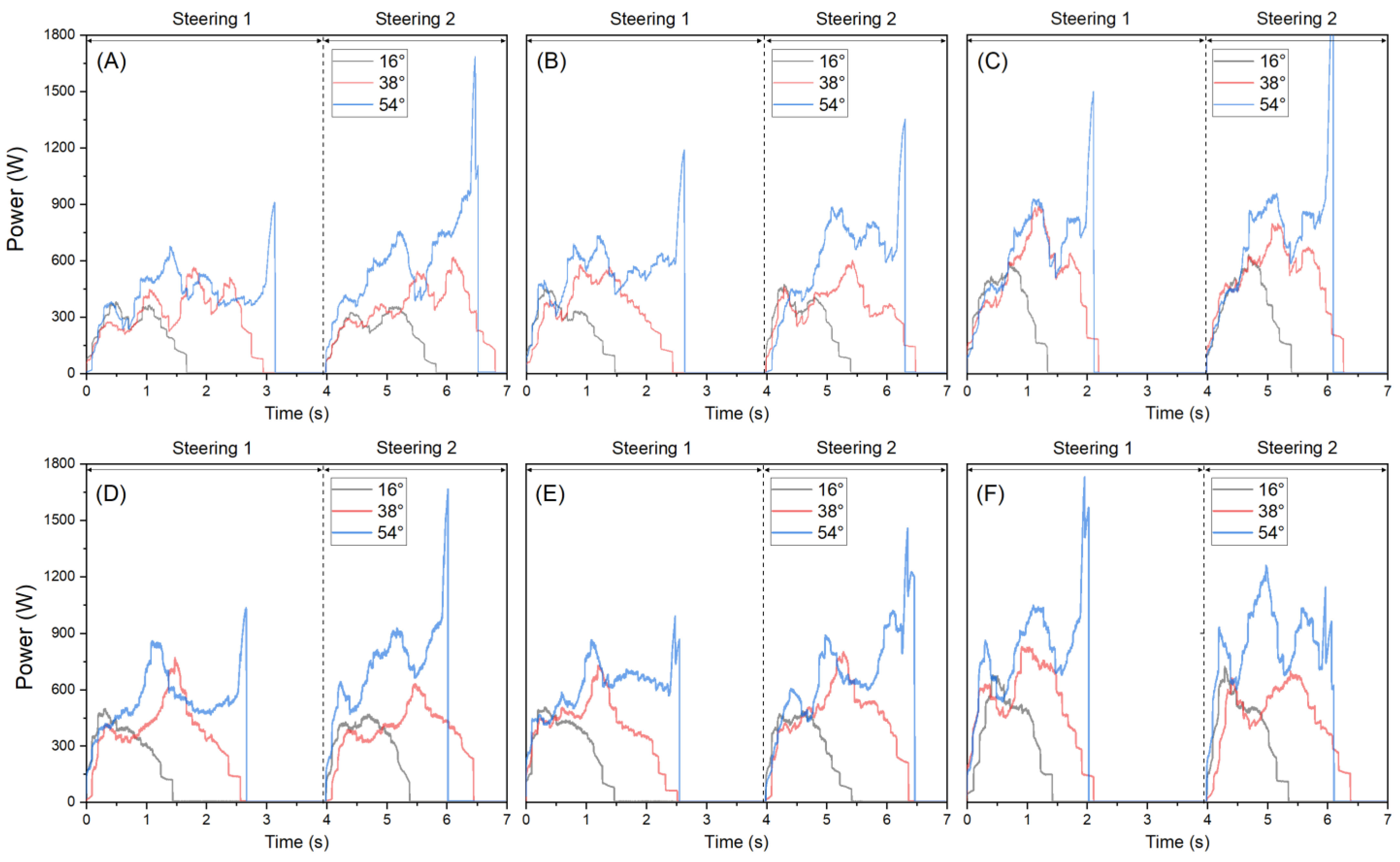
22]. Therefore, in order to analyze the dynamic characteristics of the EHPV according to tractor operation, it is essential to establish a database of hydraulic characteristics that accounts for various working conditions including soil physical properties. However, since soil physical properties cannot be controlled by researchers, it is difficult to derive the exact performance of the EHPV when conducting experiments on soil condition. The hydraulic characteristics of an EHPV can be defined as real-time flow rate, pressure, and required power characteristics. The results of analyzing the hydraulic characteristics of EHPVs according to these tractor working conditions can be used for future EHPV design optimization and control strategy establishment. The performance of the hydraulic system for steering a tractor differs based on the engine rotational speed and steering angle. First, the flow rate supplied to the EHPV is identified from the hydraulic pump directly connected to the tractor engine, which varies depending on the engine rotational speed based on the hydraulic pump’s displacement. Second, since the opening and closing amount of the EHPV is presented according to the steering angle of the tractor, the performance of the hydraulic system differs depending on the steering angle. Hence, it is essential to measure and analyze hydraulic characteristics such as flow rate and pressure of the EHPV in line with actual tractor working conditions so as to secure basic data for the design and development of EHPVs applicable to automatic steering tractors.
Therefore, the aim of this study is to analyze and evaluate hydraulic characteristics of an EHPV under various working conditions. The specific research objectives are: (1) development of a flow rate and pressure measurement system for EHPV, (2) measurement of flow rate and pressure characteristics according to working conditions, (3) required power analysis and statistical analysis based on different working conditions, and (4) evaluation of the impact of working conditions on hydraulic characteristics through regression analysis.
4. Discussion
A tractor is distinct from a car in that its primary purpose is work rather than transportation. The conventional work of tractors is carried out by fixing the engine rotational speed to the rated speed condition [
25]. When employing the automatic steering function in actual work, left and right steering control will be carried out in the process of following the target path, which results in a change in steering angle. High-performance EHPVs are needed for fast and accurate steering control of auto-steering tractors. To develop high-performance EHPVs, it is essential to secure a high level of design reliability. Specifically, since tractors function under various working conditions, it is crucial to obtain actual vehicle data for each EHPV condition. Thus, the data on the hydraulic characteristics of EHPVs under several working conditions collected in this study can be used as basic data for designing highly reliable EHPVs. The hydraulic characteristic data can serve as a useful reference for optimizing design, predicting and enhancing performance during practical usage, as well as developing control algorithms that consider the working conditions of the tractor. Furthermore, since the hydraulic characteristics of EHPVs also impact the lifetime and reliability of EHPVs, the obtained data can be employed for research such as valve life evaluation.
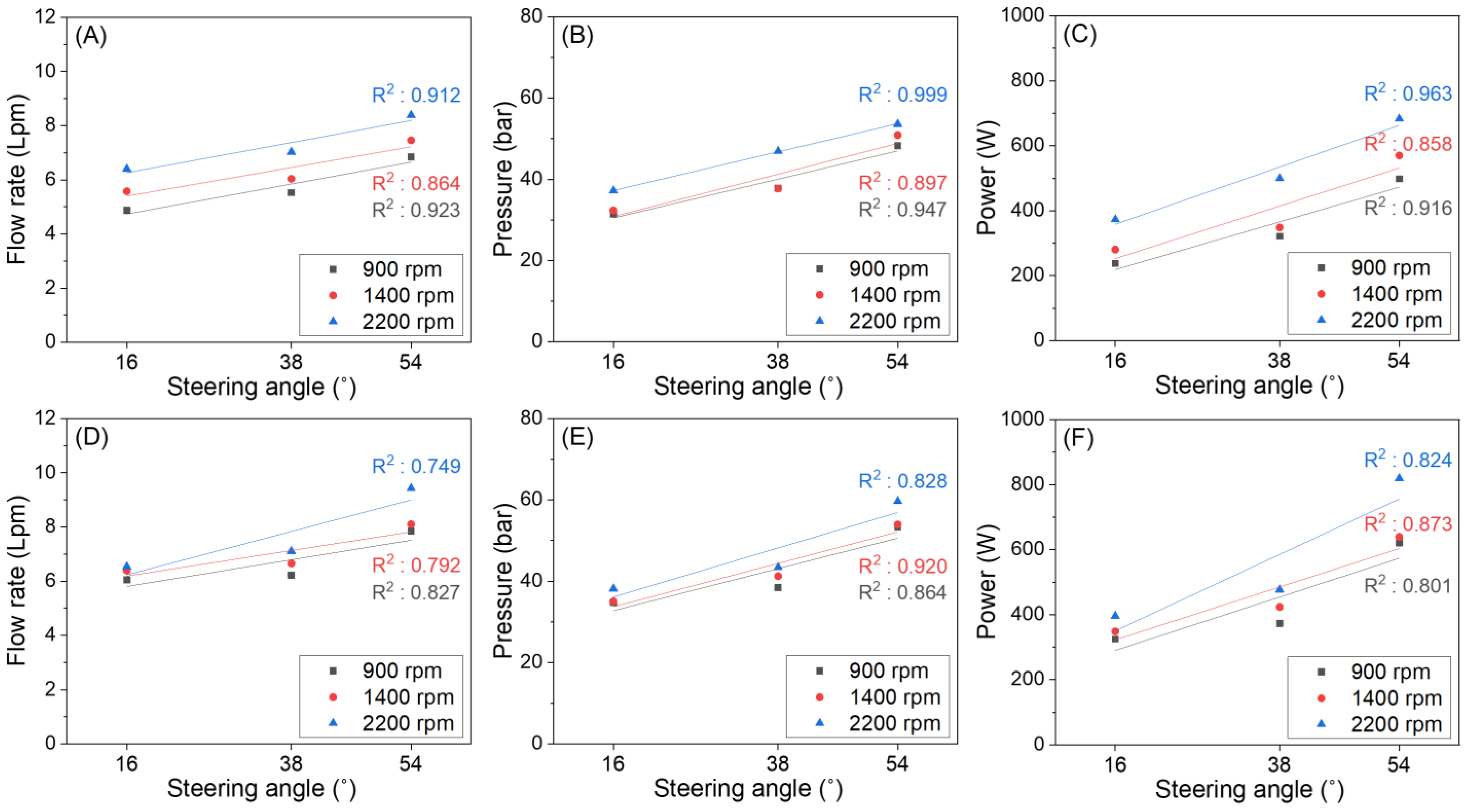
Because of this study, it was verified that the steering angle condition had a higher correlation with the hydraulic characteristics of EHPVs than the engine rotation speed condition. Additionally, the rate of increase in each flow rate, pressure, and power based on the increase in the steering angle was higher than that in the case of engine rotation speed.
Nevertheless, since this study was performed when the tractor was stationary, there is a limitation in not including data when the tractor was running. Xia et al., (2016) demonstrated that the pressure on the steering cylinder increases as the speed of the vehicle decreases [
19]. Specifically, the stronger the torque is on the steering wheel, the greater the difference, since the pressure rises more steeply at low speeds. These factors may result in lower pressure in the EHPV during actual driving. However, the load on the tractor that happens when the tractor is driven in soil conditions increases the flow rate, pressure, and power requirements of the EHPV. As such, several conditions, such as speed conditions and road surface conditions, can affect the dynamic characteristics of the tractor EHPV. Thus, to expand the study’s outcomes, it is essential to secure data for each condition. If experiments are conducted by subdividing them based on soil conditions and tractor operation types, it is anticipated that the reliability of the hydraulic properties of the EHPV will be enhanced. In addition, the utilization of EHPV’s hardware data in conjunction with the development of a mathematical model can greatly benefit the design of control systems. By conducting research on the control response performance of the EHPV, we can anticipate significant advancements in both control system design and the steering performance of automatic steering tractors. These contents mentioned above will be addressed in future studies.
5. Conclusions
This study, as a fundamental investigation for the design of the EHPV in auto-steering tractors, aimed to assess the hydraulic characteristics of the EHPV based on tractor engine rotation speed and steering angle. The hydraulic properties of valves play a crucial role in valve design, performance prediction, lifespan evaluation, and reliability assessment. The key findings of this study are summarized as follows.
- (1)
ANOVA analysis revealed statistically significant differences in the hydraulic characteristics of the EHPV under different engine rotation speeds and steering angle conditions. These results clearly demonstrate that both working conditions have a significant impact on the hydraulic properties of the EHPV.
- (2)
The required power exhibited the highest coefficient of variation. By minimizing flow rate fluctuations, it is possible to reduce power fluctuations and enhance the stability of the EHPV.
- (3)
Through the results of the regression analysis, it was revealed that the engine rotation speed and steering angle had a linear relationship with the hydraulic characteristics of the EHPV and that the steering angle had a greater effect on the hydraulic characteristics.
- (4)
The design specifications of the flow control valve in the EHPV have a substantial influence on its hydraulic characteristics. Excessive control flow rate may lead to increased power fluctuations, while insufficient control flow rate could compromise steering performance.
In conclusion, this study provides valuable insights into the hydraulic characteristics of the EHPV in auto-steering tractors. The results emphasize the significance of engine rotation speed and steering angle in influencing the hydraulic properties. These findings can contribute to the design, performance optimization, and reliability enhancement of EHPV systems. Future research should focus on analyzing the EHPV hydraulic performance when the tractor is operating in actual soil conditions.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}