
Spherical Inverted Pendulum on a Quadrotor UAV: A Flatness and Discontinuous Extended State Observer Approach
 , , and
, , and
Abstract
:1. Introduction
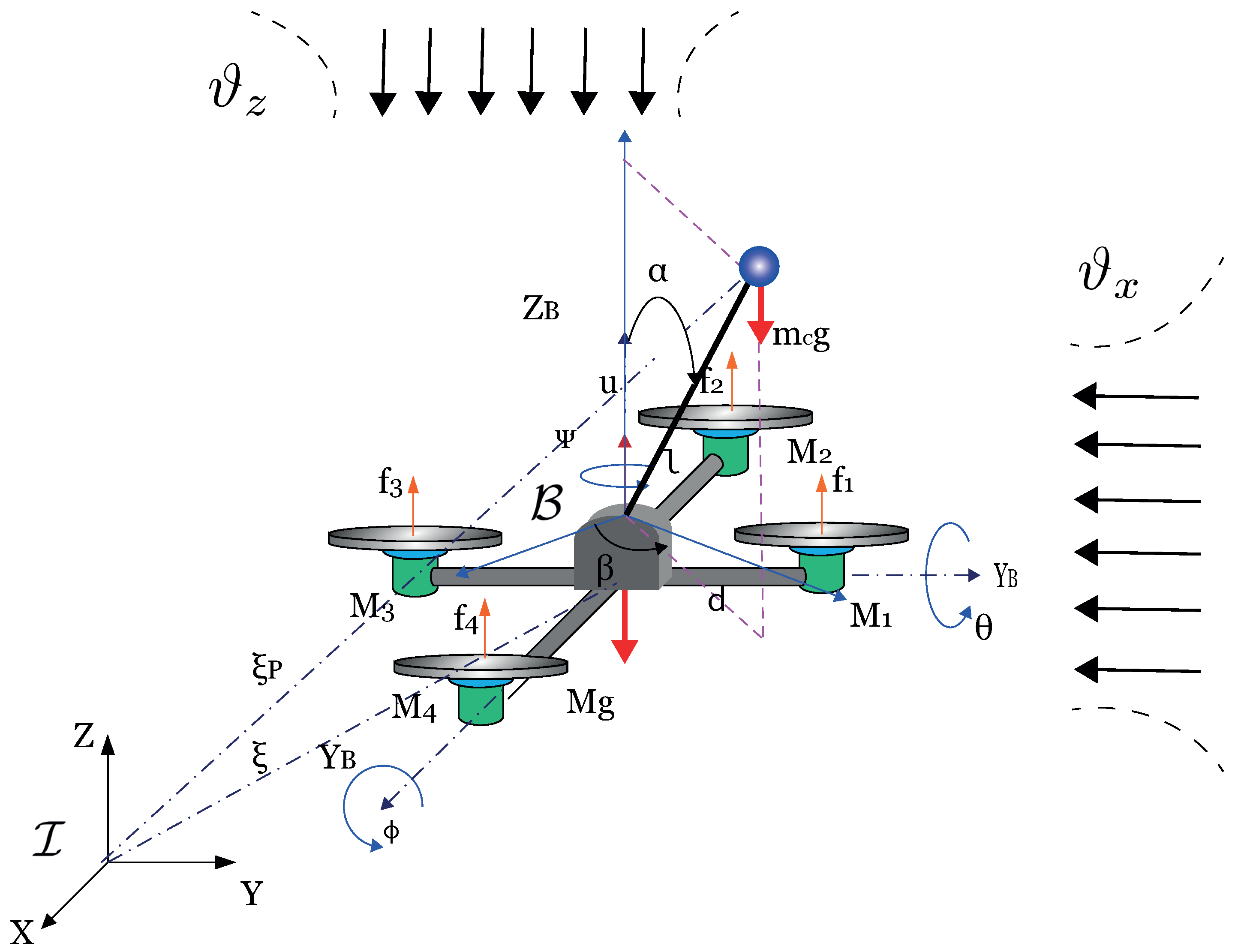
- The full system of the quadrotor and inverted pendulum in three dimensions is considered, where four control strategies are shown to control the system in roll, pitch, yaw, and height. Therefore, four control strategies based on DESO-ADRC are proposed. The explicit model is presented and attacked in terms of the eight states that describe the dynamics of motion of the quadrotor and the inverted spherical pendulum. This allows us to apply the strategy described in Martinez-Vasquez A. et al. [17] where the model is simplified in three dynamics of translation around the three axes of the coordinate system and one dynamic of rotation associated with the yaw motion.
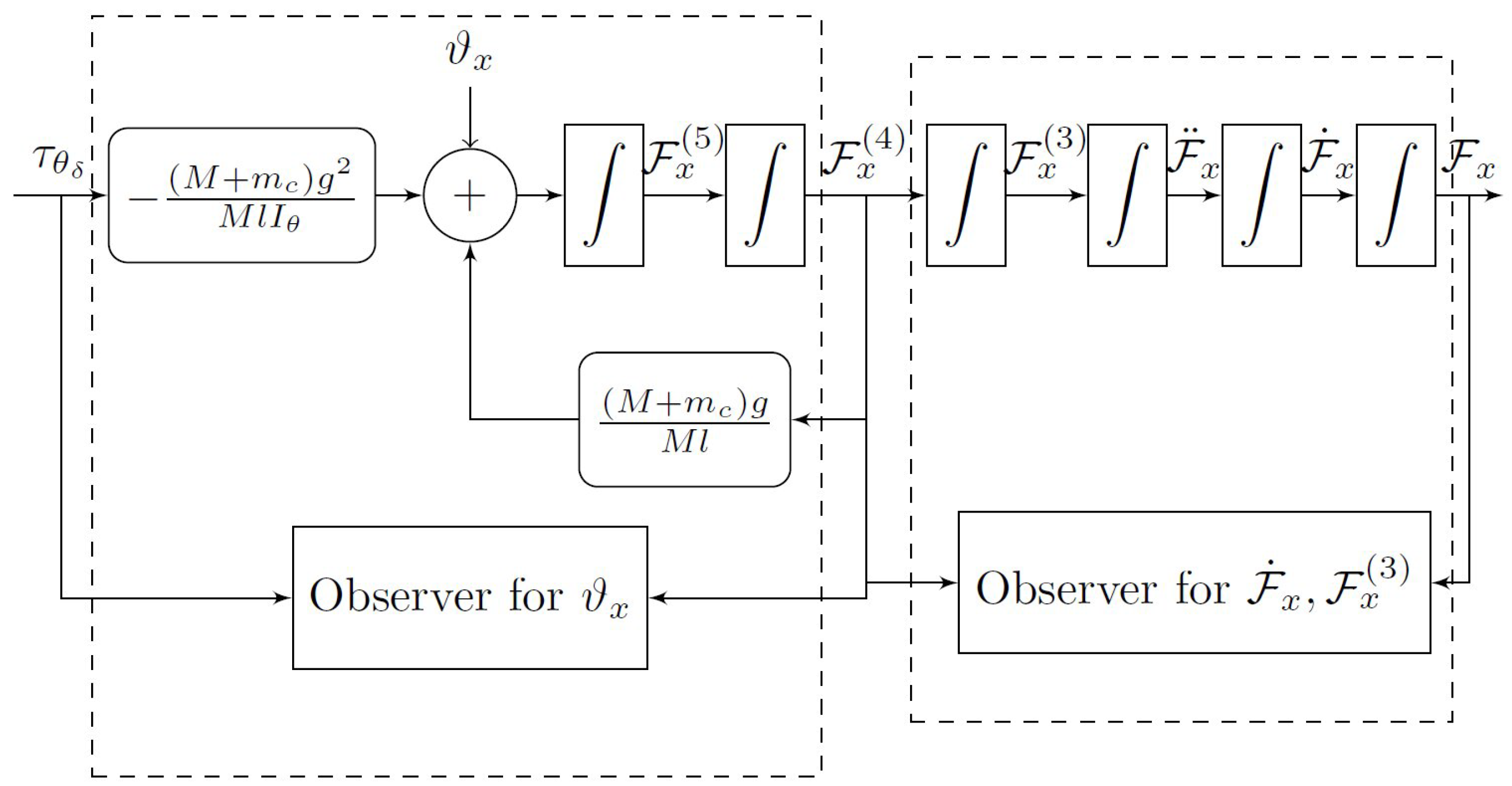
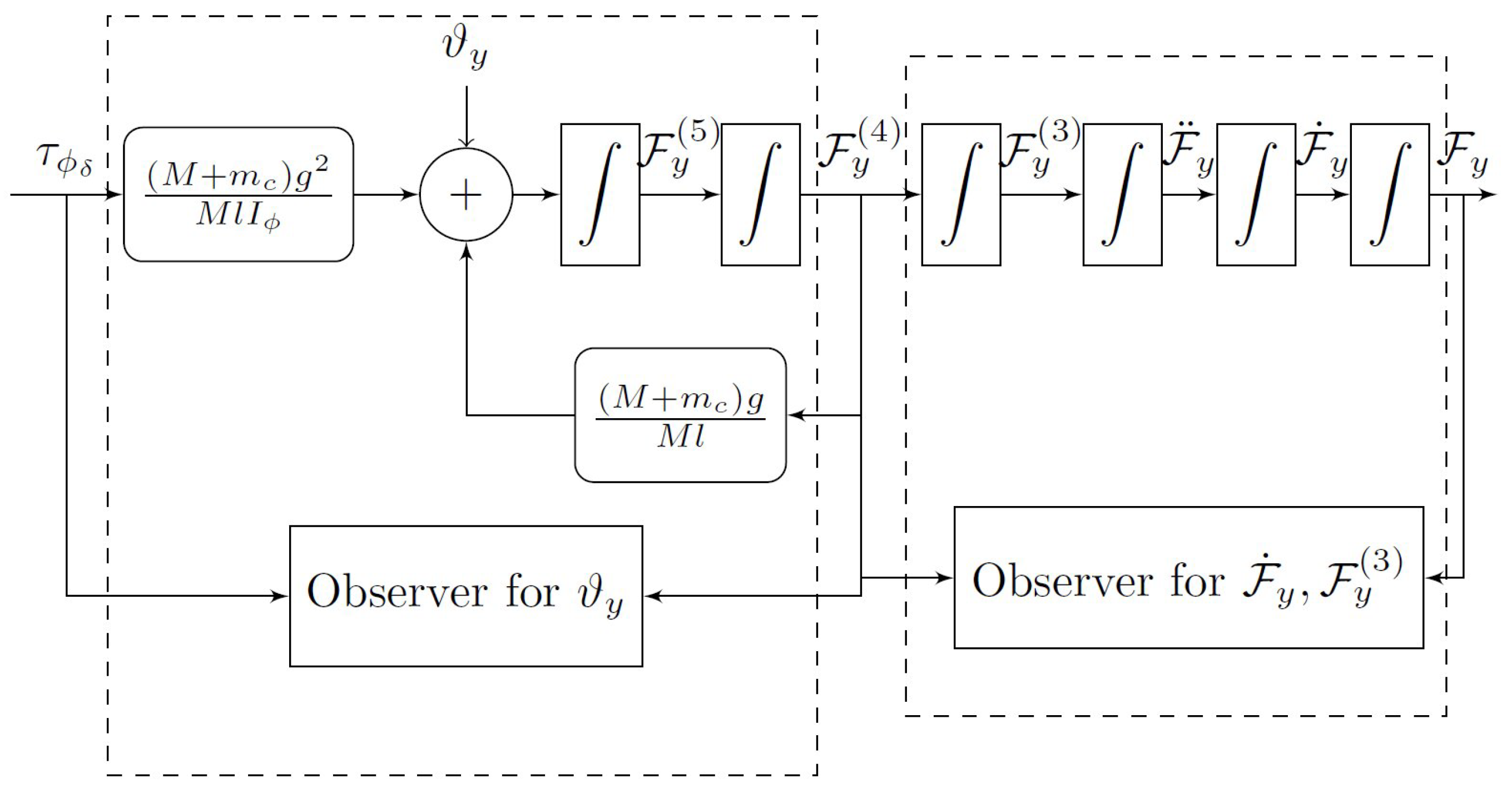
- The differential parameterization is presented. However, in this article the parameterization is extended to the yaw dynamics and the extra horizontal translational dynamics around the Y axis, allowing to consider the roll dynamic rotation of the quadrotor, the swing dynamics of the pendulum in the frame, and the dynamics of translation of the quadrotor on the Y axis with the control input .
2. Inverted Pendulum on a Quadrotor Model
Problem Statement
3. Control Strategy
3.1. Yaw Control
3.2. Height Control
3.3. Horizontal Position Control
4. Convergence Analysis
4.1. Discontinuous Extended State Observer
4.2. The Disturbance Canceling Controller
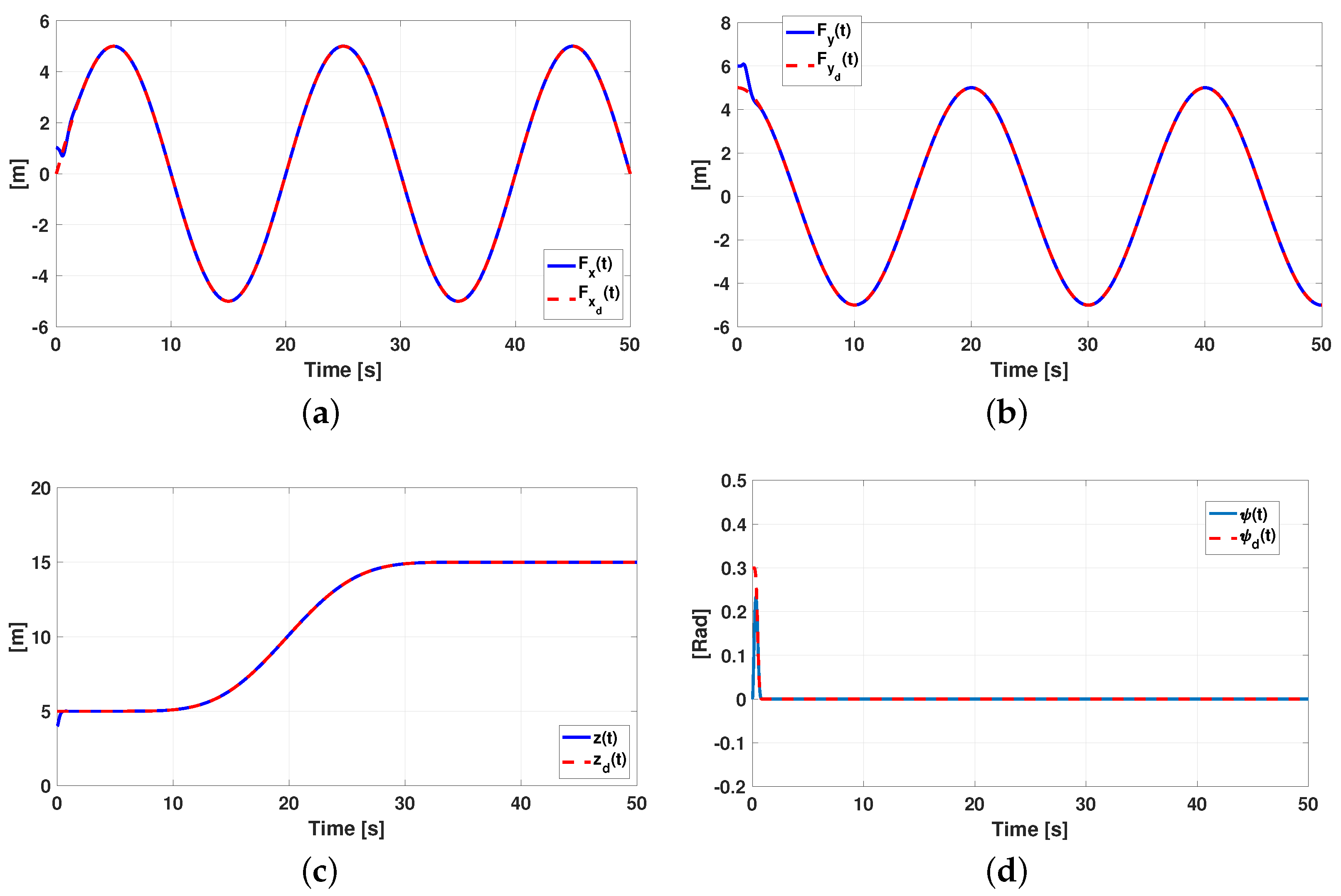
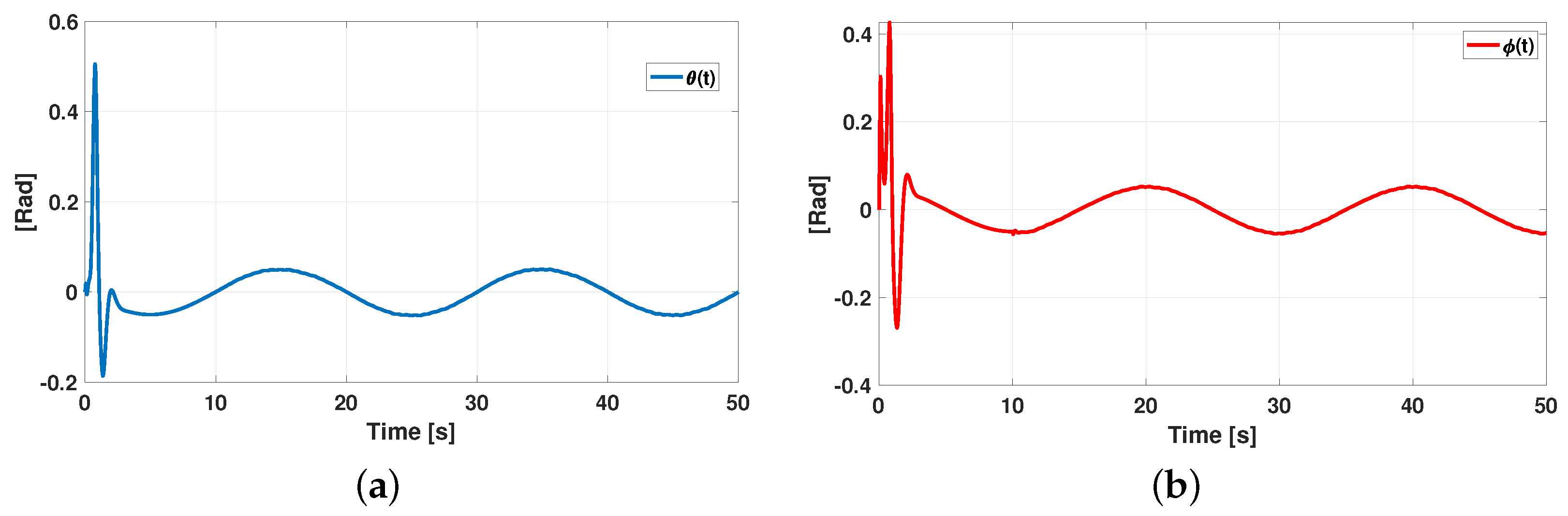
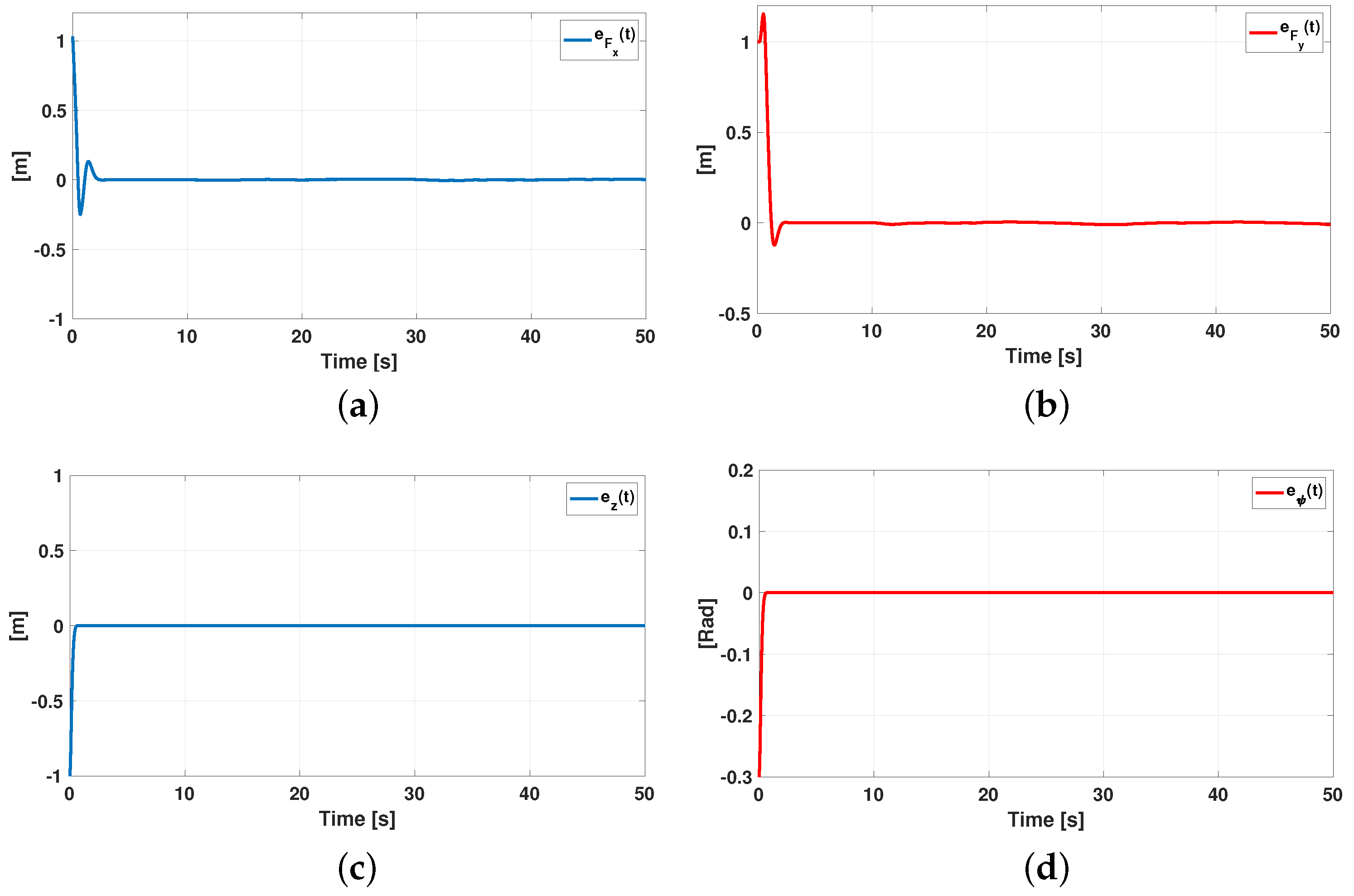
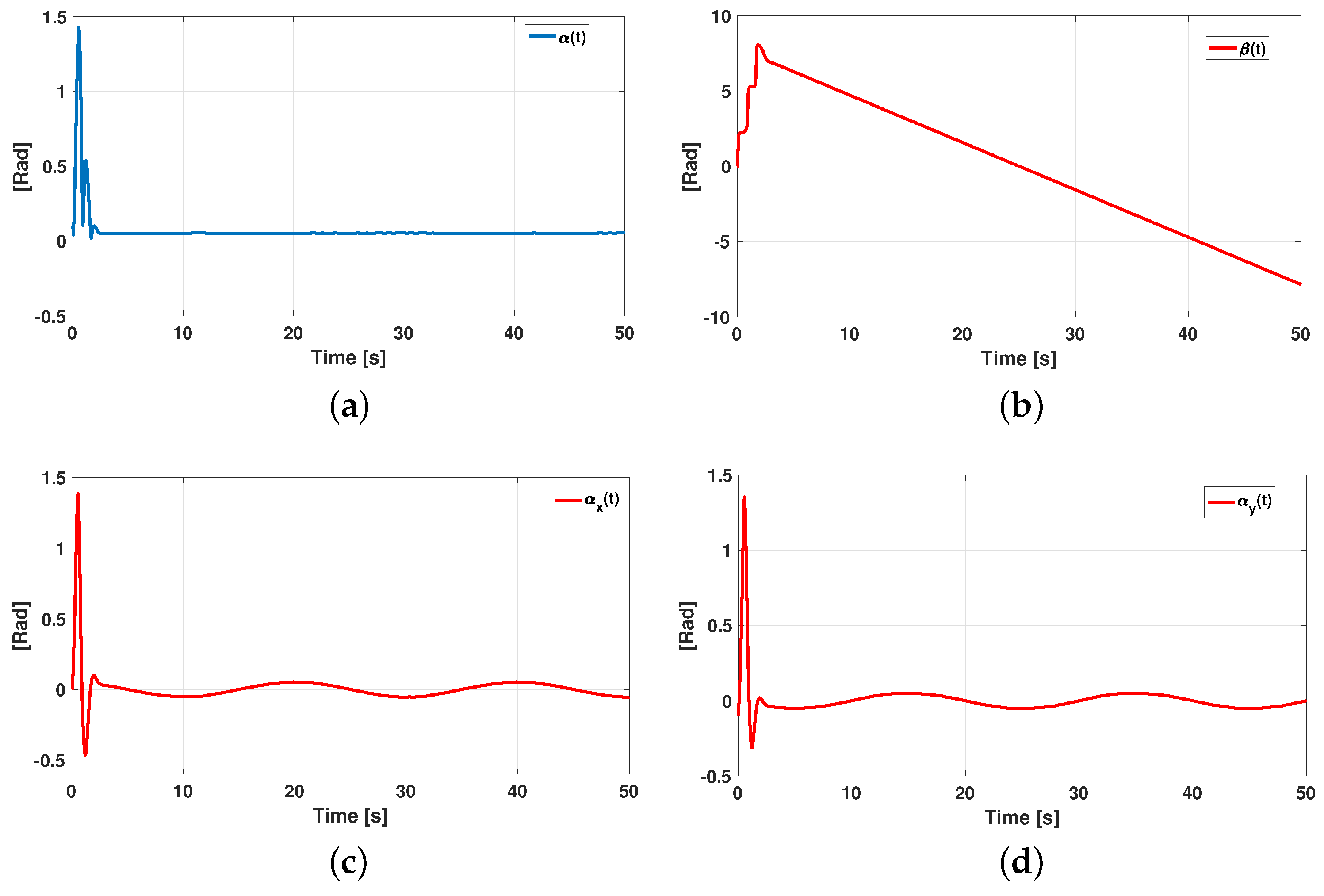
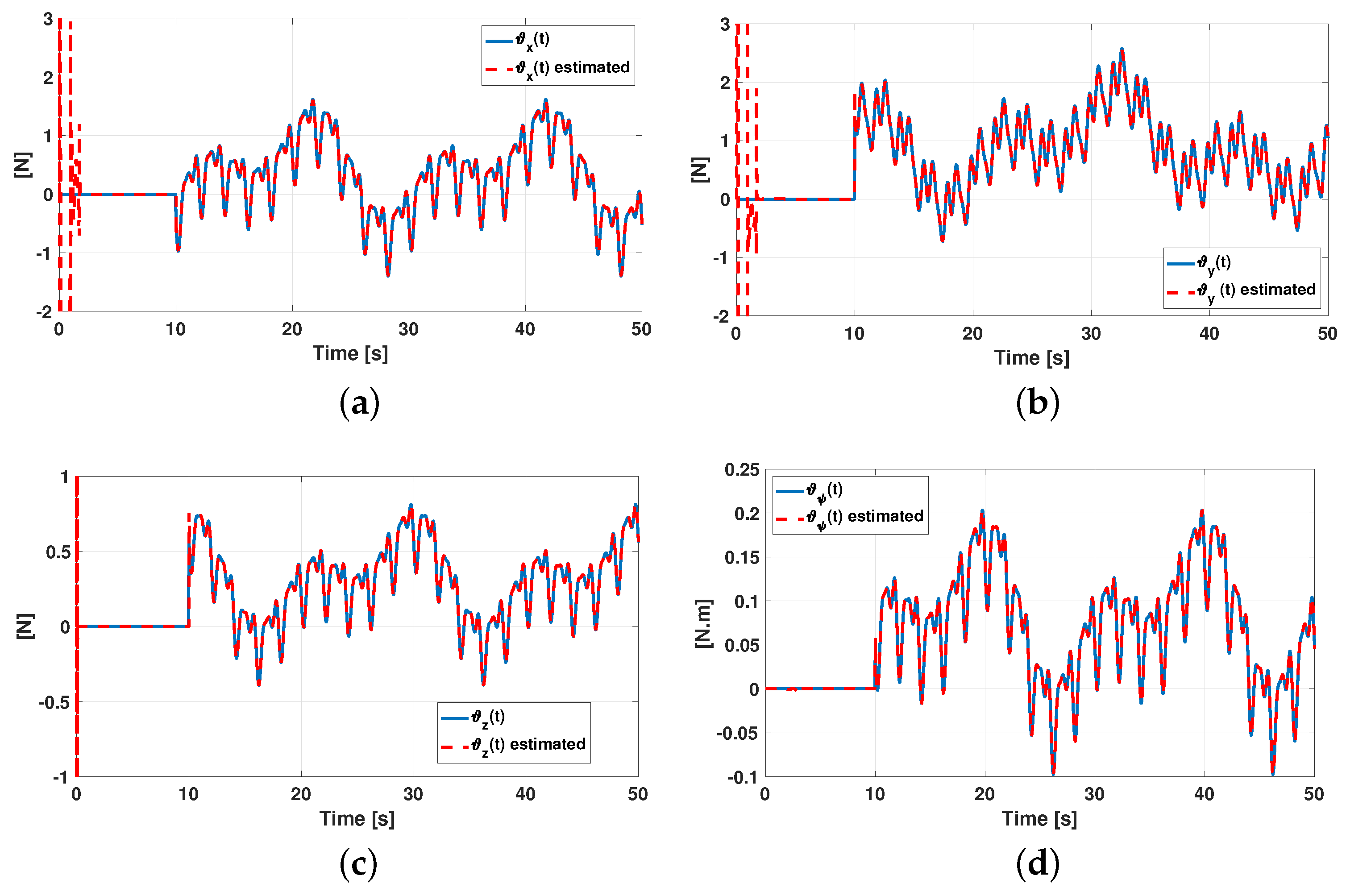
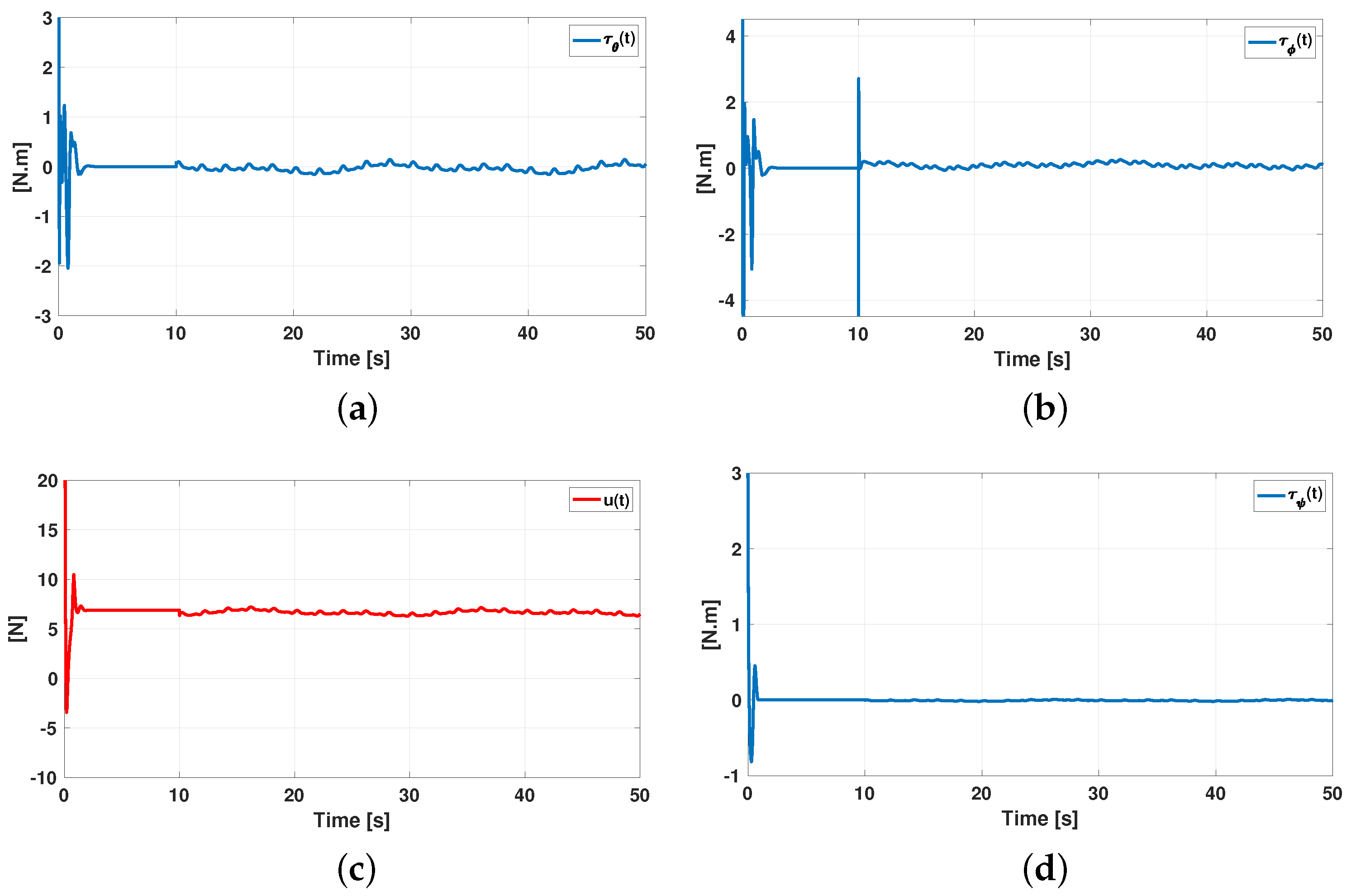
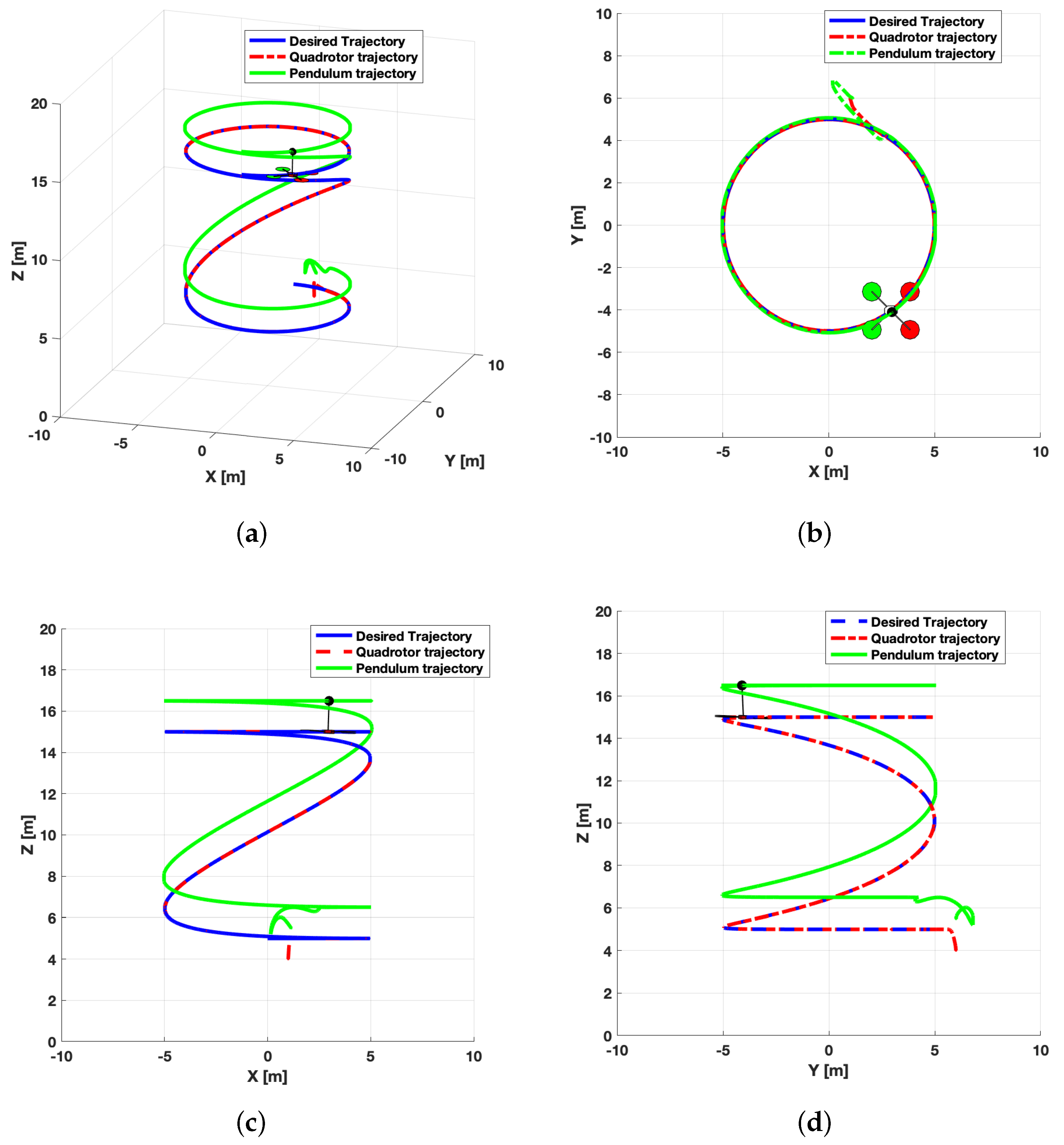
5. Numerical Result
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Israilov, S.; Fu, L.; Sánchez-Rodríguez, J.; Fusco, F.; Allibert, G.; Raufaste, C.; Argentina, M. Reinforcement learning approach to control an inverted pendulum: A general framework for educational purposes. PLoS ONE 2023, 18, e0280071. [Google Scholar] [CrossRef] [PubMed]
- He, B.; Wang, S.; Liu, Y. Underactuated robotics: A review. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419862164. [Google Scholar] [CrossRef]
- Hehn, M.; D’Andrea, R. A flying inverted pendulum. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 763–770. [Google Scholar] [CrossRef]
- Krafes, S.; Chalh, Z.; Saka, A. Vision-based control of a flying spherical inverted pendulum. In Proceedings of the 2018 4th International Conference on Optimization and Applications (ICOA), Mohammedia, Morocco, 26–27 April 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Nayak, A.; Banavar, R.N.; Maithripala, D.H.S. Stabilizing a spherical pendulum on a quadrotor. Asian J. Control 2021, 24, 1112–1121. [Google Scholar] [CrossRef]
- Ibuki, T.; Tadokoro, Y.; Fujita, Y.; Sampei, M. 3D inverted pendulum stabilization on a quadrotor via bilinear system approximations. In Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, Australia, 21–23 September 2015; pp. 513–518. [Google Scholar] [CrossRef]
- de Almeida, M.M.; Raffo, G.V. Nonlinear Balance Control of an Inverted Pendulum on a Tilt-rotor UAV. IFAC-PapersOnLine 2015, 48, 168–173. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, D.; Xi, H.; Zhang, G. Anti-swing control and trajectory planning of quadrotor suspended payload system with variable length cable. Asian J. Control 2022, 24, 2424–2436. [Google Scholar] [CrossRef]
- Abadi, A.; Amraoui, A.E.; Mekki, H.; Ramdani, N. Robust tracking control of quadrotor based on flatness and active disturbance rejection control. IET Control Theory Appl. 2020, 14, 1057–1068. [Google Scholar] [CrossRef]
- Oloo, J. Effect of loss of control effectiveness on an inverted pendulum balanced on a moving quadrotor. Heliyon 2023, 9, e14494. [Google Scholar] [CrossRef] [PubMed]
- Nasir, A.N.K.; Razak, A.A.A. Opposition-based spiral dynamic algorithm with an application to optimize type-2 fuzzy control for an inverted pendulum system. Expert Syst. Appl. 2022, 195, 116661. [Google Scholar] [CrossRef]
- Siravuru, A.; Sreenath, K. Nonlinear Control using Coordinate-free and Euler Formulations: An Empirical Evaluation on a 3D Pendulum. IFAC-PapersOnLine 2020, 53, 8847–8852. [Google Scholar] [CrossRef]
- Yang, W.; Reis, J.; Silvestre, C. Saturated Nonlinear Trajectory Tracking Controller for Inverted Pendulum on a Quadrotor. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Villaseñor Rios, C.A.; Luviano-Juárez, A.; Lozada-Castillo, N.B.; Carvajal-Gámez, B.E.; Mújica-Vargas, D.; Gutiérrez-Frías, O. Flatness-Based Active Disturbance Rejection Control for a PVTOL Aircraft System with an Inverted Pendular Load. Machines 2022, 10, 595. [Google Scholar] [CrossRef]
- Najm, A.A.; Ibraheem, I.K.; Azar, A.T.; Humaidi, A.J. On the stabilization of 6-DOF UAV quadrotor system using modified active disturbance rejection control. In Advances in Nonlinear Dynamics and Chaos (ANDC), Unmanned Aerial System; Koubaa, A., Azar, A.T., Eds.; Academic Press: Cambridge, MA, USA, 2021; Chapter 11; pp. 257–287. ISBN 9780128202760. [Google Scholar] [CrossRef]
- Moreno, J.A. On Discontinuous Observers for Second Order Systems: Properties, Analysis and Design. In Advances in Sliding Mode Control. Lecture Notes in Control and Information Sciences; Bandyopadhyay, B., Janardhanan, S., Spurgeon, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 440. [Google Scholar] [CrossRef]
- Martinez-Vasquez, A.H.; Castro-Linares, R.; Rodriguez-Mata, A.E. Sliding Mode Control of a Quadrotor with Suspended Payload: A Differential Flatness Approach. In Proceedings of the 2020 17th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 11–13 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Martinez-Vasquez, A.H.; Castro-Linares, R.; Sira-Ramírez, H. Discontinuous Active Disturbance Rejection Control of an Inverted Pendulum on a Quadrotor UAV. In Proceedings of the 2022 IEEE International Conference on Engineering Veracruz (ICEV), Boca del Rio, Mexico, 24–27 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Pedro, C.; Alejandro, D. Aerodynamic Configurations and Dynamic Models. In Unmanned Aerial Vehicles; Wiley: Hoboken, NJ, USA, 2013; pp. 1–20. [Google Scholar] [CrossRef]
- Hebertt, S.; Sunil, A. Differentially Flat Systems; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Sira-Ramirez, H.; Luviano-Juárez, A.; Ramírez-Neria, M.; Zurita-Bustamante, E.W. Active Disturbance Rejection Control of Dynamic Systems: A Flatness Based Approach; Butterworth-Heinemann: Oxford, UK, 2018. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Mass of the quadrotor, (M) | 0.5 | [kg] |
| Mass of the suspended load, () | 0.2 | [kg] |
| Cable length, (l) | 0.3 | [m] |
| Gravitational acceleration, (g) | 9.8 | [m/s] |
| Inertia () | 0.1 | [kg.m] |
| Inertia, () | 0.1 | [kg.m] |
| Inertia, () | 0.1 | [kg.m] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez-Vasquez, A.H.; Castro-Linares, R.; Rodríguez-Mata, A.E.; Sira-Ramírez, H. Spherical Inverted Pendulum on a Quadrotor UAV: A Flatness and Discontinuous Extended State Observer Approach. Machines 2023, 11, 578. https://doi.org/10.3390/machines11060578
Martinez-Vasquez AH, Castro-Linares R, Rodríguez-Mata AE, Sira-Ramírez H. Spherical Inverted Pendulum on a Quadrotor UAV: A Flatness and Discontinuous Extended State Observer Approach. Machines. 2023; 11(6):578. https://doi.org/10.3390/machines11060578
Chicago/Turabian StyleMartinez-Vasquez, Adrian H., Rafael Castro-Linares, Abraham Efraím Rodríguez-Mata, and Hebertt Sira-Ramírez. 2023. "Spherical Inverted Pendulum on a Quadrotor UAV: A Flatness and Discontinuous Extended State Observer Approach" Machines 11, no. 6: 578. https://doi.org/10.3390/machines11060578