
An Improved Sensorless Nonlinear Control Based on SC-MRAS Estimator of Open-End Winding Five-Phase Induction Motor Fed by Dual NPC Inverter: Hardware-in-the-Loop Implementation





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modeling of OeW-5PIM Topology
2.1. Description of 5PIM Model
2.2. Power Circuit of OeW-5PIM
3. Adopted Control Techniques
3.1. Feedback Linearization Control (FLC)
3.2. Sliding Mode (SM) Controller
4. Design of Proposed Estimator
4.1. Rotor Flux Estimator
4.2. Stator Current Estimator
4.3. Rotor Speed Estimator
4.4. Motor Resistances Estimator
5. Hardware-in-the-Loop Testing Results
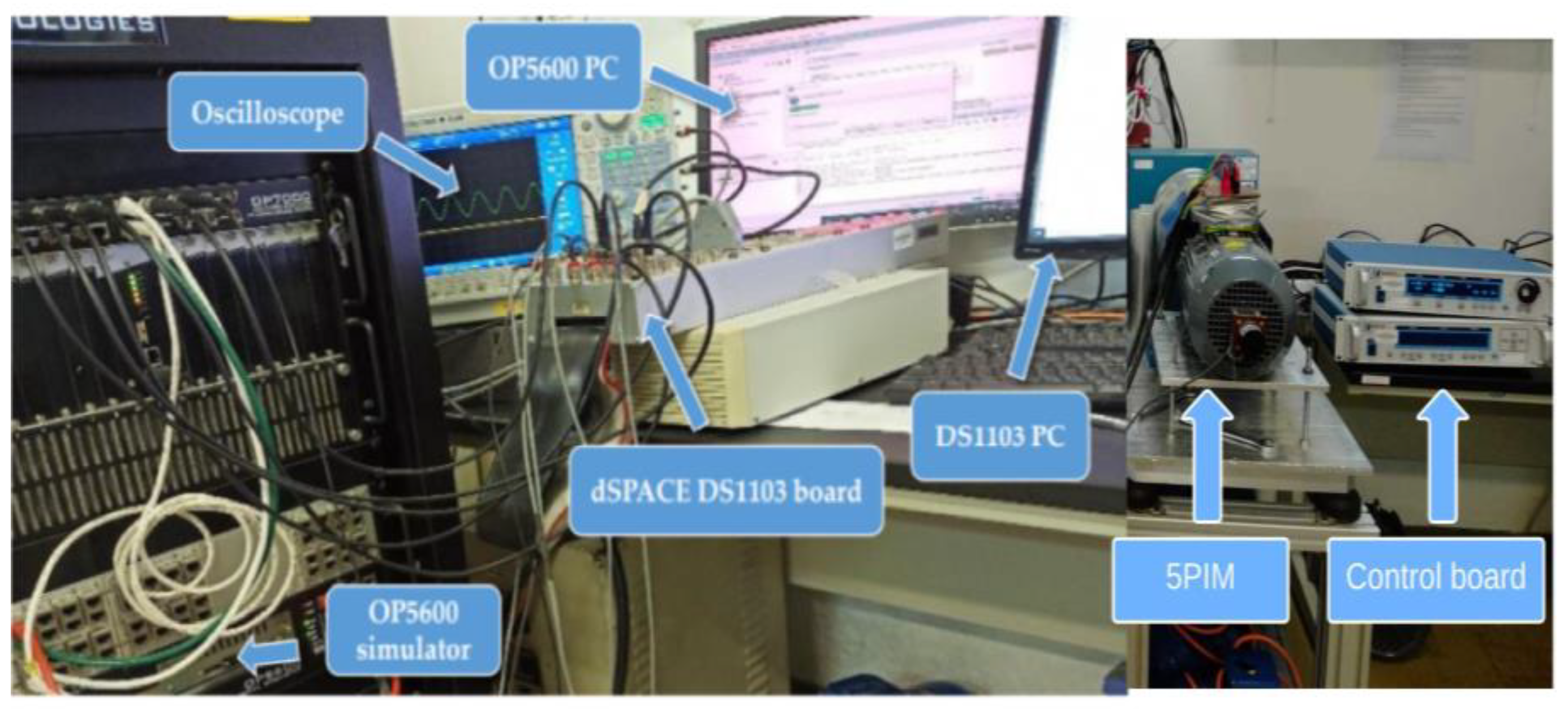
5.1. HIL Setup
5.2. First Test
5.3. Second Test
5.4. Third Test
5.5. Fourth Test
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, G.; Geng, C.; Chen, Q. Sensorless Control for Five-Phase IPMSM Drives by Injecting HF Square-Wave Voltage Signal into Third Harmonic Space. IEEE Access 2020, 8, 69712–69721. [Google Scholar] [CrossRef]
- Khadar, S.; Kouzou, A.; Hafaifa, A.; Iqbal, A. Investigation on SVM-Backstepping sensorless control of five-phase open-end winding induction motor based on model reference adaptive system and parameter estimation. Eng. Sci. Technol. Int. J. 2019, 22, 1013–1026. [Google Scholar]
- Hosseyni, A.; Trabelsi, R.; Mimouni, M.F.; Iqbal, A.; Alammari, R. Sensorless sliding mode observer for a five-phase permanent magnet synchronous motor drive. ISA Trans. 2015, 58, 462–473. [Google Scholar] [CrossRef] [PubMed]
- Holakooie, M.H.; Ojaghi, M.; Taheri, A. Direct Torque Control of Six-phase Induction Motor with a Novel MRAS-Based Stator Resistance Estimator. IEEE Trans. Ind. Electron. 2018, 65, 7685–7696. [Google Scholar] [CrossRef]
- Khadar, S.; Abu-Rub, H.; Kouzou, A. Sensorless Field-Oriented Control for Open-End Winding Five-Phase Induction Motor with Parameters Estimation. IEEE Open J. Ind. Electron. Soc. 2021, 2, 266–279. [Google Scholar] [CrossRef]
- Echeikh, H.; Trabels, R.; Iqbal, A.; Mimouni, M.F. Adaptive direct torque control using Luenberger-sliding mode observer for online stator resistance estimation for five-phase induction motor drives. Electr. Eng. 2018, 100, 1639–1649. [Google Scholar] [CrossRef]
- Khadar, S.; Kouzou, A.; Rezaoui, M.M.; Hafaifa, A. Fault-tolerant sensorless sliding mode control by parameters estimation of an open-end winding five-phase induction motor. Model. Meas. Control. 2019, 92, 6–15. [Google Scholar] [CrossRef]
- Taheri, S.; Hai-Peng, R.; Chun-Huan, S. Sensorless Direct Torque Control of the Six-Phase Induction Motor by Fast Reduced Order Extended Kalman Filter. Complexity 2020, 1–10. [Google Scholar] [CrossRef]
- Echeikh, H.; Trabels, R.; Iqbal, A.; Mimouni, M.F. Real time implementation of indirect rotor flux-oriented control of a five-phase induction motor with novel rotor resistance adaption using sliding mode observer. J. Frankl. Inst. 2018, 355, 2112–2141. [Google Scholar] [CrossRef]
- Mossa, A.M.; Quynh, N.; Echeikh, H.; Do, T.D. Deadbeat-Based Model Predictive Voltage Control for a Sensorless Five-Phase Induction Motor Drive. Math. Probl. Eng. 2020, 2020, 30. [Google Scholar] [CrossRef]
- Bojoi, R.; Cavagnino, A.; Tenconi, A.; Vaschetto, S. Control of shaft-line-embedded multiphase starter/generator for aero-engine. IEEE Trans. Ind. Electron. 2016, 63, 641–652. [Google Scholar] [CrossRef]
- De-Lillo, L.; Empringham, L.; Wheeler, P.; Khwan, S.; Gerada, C.; Othman, M.; Huang, X. Multiphase power converter drive for fault-tolerant machine development in aerospace applications. IEEE Trans. Ind. Electron. 2010, 57, 575–583. [Google Scholar] [CrossRef]
- Bojoi, R.; Cavagnino, A.; Cossale, M.; Tenconi, A. Multiphase starter generator for a 48 V mini-hybrid power train: Design and testing. IEEE Trans. Ind. Appl. 2016, 52, 1750–1758. [Google Scholar]
- Khadar, S.; Kouzou, A.; Benguesmia, H. Fuzzy Stator Resistance Estimator of Induction Motor fed by a Three Levels NPC Inverter Controlled by Direct Torque Control. In Proceedings of the 2018 International Conference on Applied Smart Systems (ICASS), Medea, Algeria, 24–25 November 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Umbría, F.; Gordillo, F.; Estern, F.G.; Salas, F.; Portillo, R.C.; Sergio, V. Voltage balancing in three-level neutral-point-clamped converters via Luenberger observer Control. Eng. Pract. 2014, 25, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Priestley, M.; Farshadnia, M.; Fletcher, J.E. FOC transformation for single open-phase faults in the five-phase open-end winding topology. IEEE Trans. Ind. Electron. 2020, 67, 842–851. [Google Scholar] [CrossRef]
- Mavila, P.C.; Rajeevan, P.P. A new direct torque control scheme for five phase open-end winding induction motor drives with reduced DC voltage requirement. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Jorge, R.; Federico, B.; Manuel, A.; Cristina, M.; Raul, G. Online Estimation of Rotor Variables in Predictive Current Controllers: A Case Study Using Five-Phase Induction Machines. IEEE Trans. Ind. Electron. 2016, 63, 5348–5356. [Google Scholar]
- Riveros, J.; Barrero, F.; Levi, E.; Durán, M.; Toral, S.; Jones, M. Variable speed five-phase induction motor drive based on predictive torque control. IEEE Trans. Ind. Electron. 2013, 60, 2957–2968. [Google Scholar] [CrossRef]
- Bagheriab, M.; Naseradinmousavib, P.; Krstić, M. Feedback linearization-based predictor for time delay control of a high-DOF robot manipulator. Automatica 2019, 108, 108485. [Google Scholar] [CrossRef]
- Regaya, C.B.; Farhani, F.; Zaafouri, A.; Chaari, A. A novel adaptive control method for induction motor based on Backstepping approach using dSpace DS 1104 control board. Mech. Syst. Signal Processing. 2018, 100, 466–481. [Google Scholar] [CrossRef]
- Van, T.P.; Tien, D.V.; Leonowicz, Z.; Jasinski, M.; Sikorski, T.; Chakrabarti, P. Online Rotor and Stator Resistance Estimation Based on Artificial Neural Network Applied in Sensorless Induction Motor Drive. Energies 2020, 13, 4946. [Google Scholar]
- Sahraoui, K.; Kouzi, K.; Ameur, A. A Robust Sensorless Iterated Extended Kalman Filter for Electromechanical Drive State Estimation. Electroteh. Electron. Autom. 2017, 65, 46–53. [Google Scholar]
- Shinohara, K.; Nagano, T.; Arima, H.; Mustafa, W.Z.W. Online tuning method of stator and rotor resistances in both motoring and regenerating operations for vector-controlled induction machines. Elect. Eng. Jpn. 2001, 135, 56–64. [Google Scholar] [CrossRef]
- Teja, A.V.R.; Verma, V.; Chakraborty, C. A new formulation of reactive-power-based model reference adaptive system for sensorless induction motor drive. IEEE Trans. Ind. Electron. 2015, 62, 6797–6808. [Google Scholar] [CrossRef]
- Rashed, M.; Stronach, A.F. A stable back-EMF MRAS-based sensorless low-speed induction motor drive insensitive to stator resistance variation. Proc. IEEE Electr. Power Appl. 2004, 151, 685–693. [Google Scholar] [CrossRef]
- Verma, V.; Chakraborty, C. New series of MRAS for speed estimation of vector-controlled induction motor drive. In Proceedings of the IECON 2014-40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 755–761. [Google Scholar]
- Korzonek, M.; Tarchala, G.; Orlowska-Kowalska, T. Simple Stability Enhancement Method for Stator Current Error-Based MRAS-Type Speed Estimator for Induction Motor. IEEE Trans. Ind. Electron. 2020, 67, 5854–5866. [Google Scholar] [CrossRef]
- Kojabadi, H.M. Active power and MRAS based rotor resistance identification of an IM drive. Simul. Model. Pract. Theory 2009, 17, 376–389. [Google Scholar] [CrossRef]
- Merabet, A.; Tanvir, A.; Beddek, K. Speed control of sensorless induction generator by artificial neural network in wind energy conversion system. IET Renew. Power Gener. 2016, 10, 1597–1606. [Google Scholar] [CrossRef]
- Kumar, A.; Ramesh, T. MRAS speed estimator for speed sensorless IFOC of an induction motor drive using fuzzy logic controller. In Proceedings of the 2015 International Conference on Energy, Power and Environment: Towards Sustainable Growth (ICEPE), Shillong, India, 12–13 June 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Korzonek, M.; Orłowska-Kowalska, T. Comparative Stability Analysis of Stator Current Error-based Estimators of Induction Motor Speed. Power Electron. Drives 2018, 3, 187–203. [Google Scholar] [CrossRef] [Green Version]
- Oh, S.C. Evaluation of motor characteristics for hybrid electric vehicles using the hardware-in-the-loop concept. IEEE Trans. Veh. Technol. 2005, 54, 817–824. [Google Scholar] [CrossRef]
- Yoon, M.; Lee, W.; Sunwoo, M. Development and implementation of distributed hardware-in-the-loop simulation for automotive engine control systems. Int. J. Automot. Technol. 2005, 6, 107–117. [Google Scholar]
- Tavana, N.R.; Dinavahi, V. Real-time nonlinear magnetic equivalent circuit model of induction machine on FPGA for hardware-in-the-loop simulation. IEEE Trans. Energy Convers. 2016, 31, 520–530. [Google Scholar]
- Zhang, Y.; Huang, P.; Yang, H. Hardware-in-the-Loop Real-time Simulation for Speed-Sensorless Vector Control of High-Power Induction Motor. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Zorgani, Y.A.; Koubaa, Y.; Boussak, M. MRAS state estimator for speed sensorless ISFOC induction motor drives with Luenberger load torque estimation. ISA Trans. 2016, 61, 308–317. [Google Scholar] [CrossRef]


















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khadar, S.; Abdelaziz, A.Y.; Elbarbary, Z.M.S.; Mossa, M.A. An Improved Sensorless Nonlinear Control Based on SC-MRAS Estimator of Open-End Winding Five-Phase Induction Motor Fed by Dual NPC Inverter: Hardware-in-the-Loop Implementation. Machines 2023, 11, 469. https://doi.org/10.3390/machines11040469
Khadar S, Abdelaziz AY, Elbarbary ZMS, Mossa MA. An Improved Sensorless Nonlinear Control Based on SC-MRAS Estimator of Open-End Winding Five-Phase Induction Motor Fed by Dual NPC Inverter: Hardware-in-the-Loop Implementation. Machines. 2023; 11(4):469. https://doi.org/10.3390/machines11040469
Chicago/Turabian StyleKhadar, Saad, Almoataz Y. Abdelaziz, Zakaria M. Salem Elbarbary, and Mahmoud A. Mossa. 2023. "An Improved Sensorless Nonlinear Control Based on SC-MRAS Estimator of Open-End Winding Five-Phase Induction Motor Fed by Dual NPC Inverter: Hardware-in-the-Loop Implementation" Machines 11, no. 4: 469. https://doi.org/10.3390/machines11040469