3.3. Robust H∞ Controller Design Based on State Observer
Considering H∞ control has strong robust performance, the H∞ control algorithm is popular in vehicle suspension control [
18]. Therefore, the H∞ control algorithm is also used in this paper. The observer-based H∞ state feedback controller can be represented as:
where
is the state feedback gain matrices to be designed.
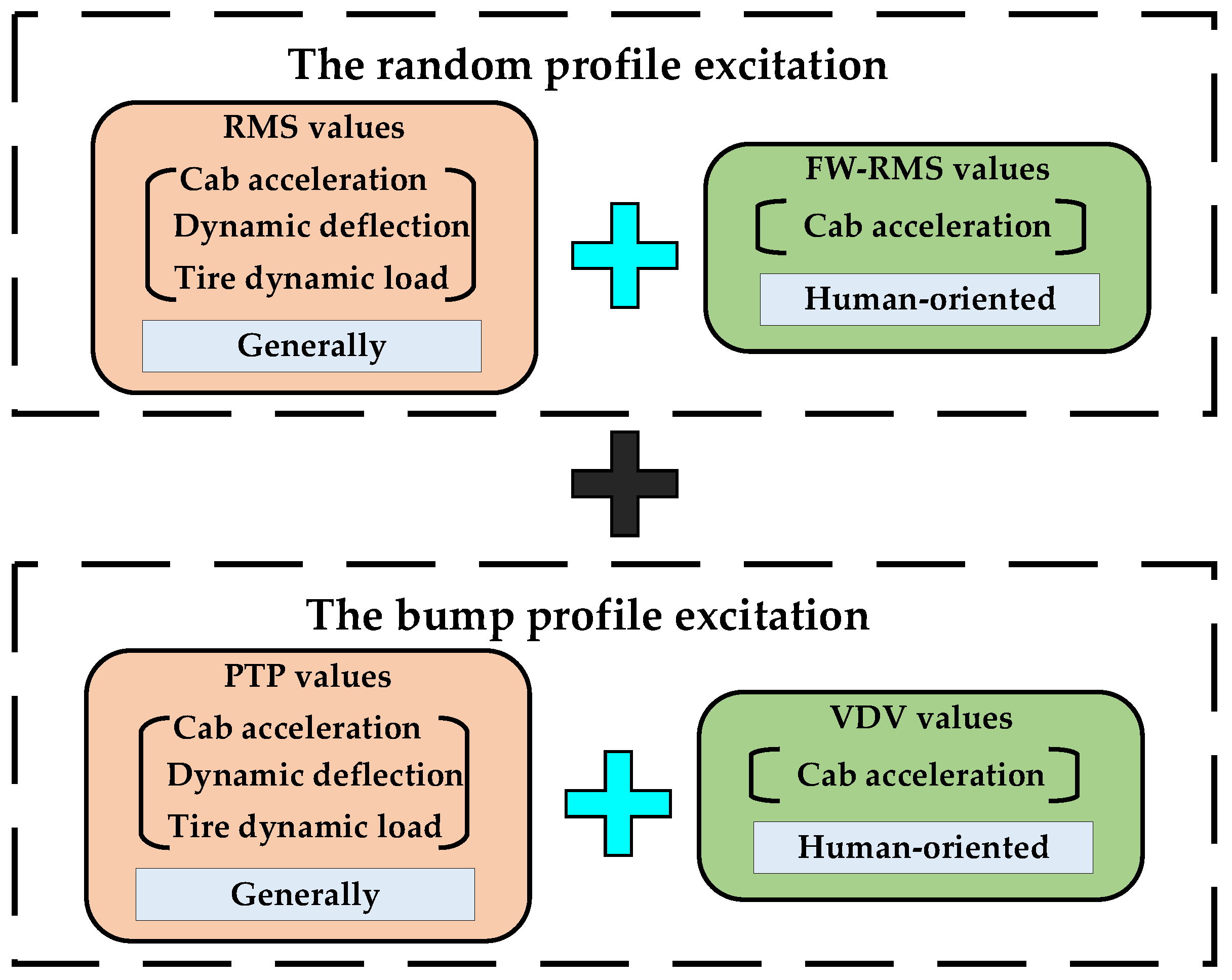
Ride comfort, road holding ability and suspension deflection are three main performance criteria in suspension design, and ride comfort is of the greatest concern, which can be quantified by the cab acceleration. Therefore, the state space of the control output is represented as follows:
In conjunction with the T-S fuzzy model in this paper, control output can be also rewritten as:
where
and
.
However, there is a contradiction between the three performance criteria of the suspension, when considering that only the ride comfort will always sacrifice the suspension deflection and road holding ability, so the other two indicators of the suspension are restricted output to ensure that the vehicle is in a relatively compromised state. The following constraints should be satisfied [
19]:
where
and
are the restricted travel of the cab suspension and the car suspension, respectively;
is gravitational constant (9.8 N/kg).
= 0.1 m and
= 0.15 m are chosen here [
20].
Based on the above inequality, the state space representation of the restricted output can be obtained:
Since the joint solution of the state observer and the state feedback controller is to be performed, the suspension system and the error system are to be combined, i.e., the observation error system and the suspension system are to be expanded into a more generalized system. Before that, the expressions of the relationship between the states of the two systems need to be obtained. Substitute Equations (23) and (24) into Equation (19), then
Combining Equations (23) and (31) yields:
where
, , ,
In order to make the controller have better performance under different vibration conditions, H∞ performance index is selected as:
where
and
.
Selecting the Lyapunov function for the system (32) as:
where
is a positive definite symmetric matrix and
.
By differentiating Equation (35) and using Equation (32), we obtain:
Adding
to the two sides of Equation (36), which represents the performance index shown in Equation (34), we obtain:
where * is used to represent a term that is induced by symmetry, and
is a performance index.
Based on Equation (37), we make a definition:
It can be deduced that if
, then
and
with the initial condition
. By applying the Schur’s complement theorem,
is equivalent to
where
represents the identity matrix.
By pre-multiplying and post-multiplying Equation (39) with
, replacing
,
and
in Equation (39), and doing the following transformation:
,
and
, we will get the matrix:
Because the observer-based control problem is not a simple LMI problem,
,
,
and
cannot be solved at the same time. Thus, this paper uses the two-step method [
21] to solve the problem.
In addition, the restrict output should also be considered, whose performance index can be expressed as follows:
where
.
If Equation (41) is satisfied, then the following formula is given [
19]:
By using the Schur complement, Equation (42) can be rewritten as:
Pre-multiplying and post-multiplying with
and performing the transformation
, Equation (43) is equivalent to
To sum up, solving Equations (40) and (44), the observer gain and the controller gain can be obtained. However, it is worth noting that since the suspension system in this paper is a T-S fuzzy system, the final solution results also depend on the mechanical performance of the air spring under specific external disturbances, i.e., the maximum and minimum stiffness values, which also affect the establishment of the fuzzy rules. Therefore, there are observer gains and controller gains for each type of external disturbance in the suspension system. The specific solution results are given in the subsequent road excitation modeling.
Now, the desired active control force is obtained and the desired damping of the electromagnetic damper is expressed as follows:
where
is the maximum damping of the electromagnetic damper. The damper can not generate damping force when
, thus
can be any value in this moment. In this case it is assigned
for security.
And the damping of electromagnetic dampers can only vary between the maximum
and minimum damping
because of the limitations of their own structure, which are expressed as follows:
and means that the required force can only be generated by the active actuator, the electromagnetic damper can not meet the requirement. Therefore, we can assign when and when .

 and
and 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}