
Kinematic Models and the Performance Level Index of a Picking-and-Placing Hybrid Robot


Abstract
:1. Introduction
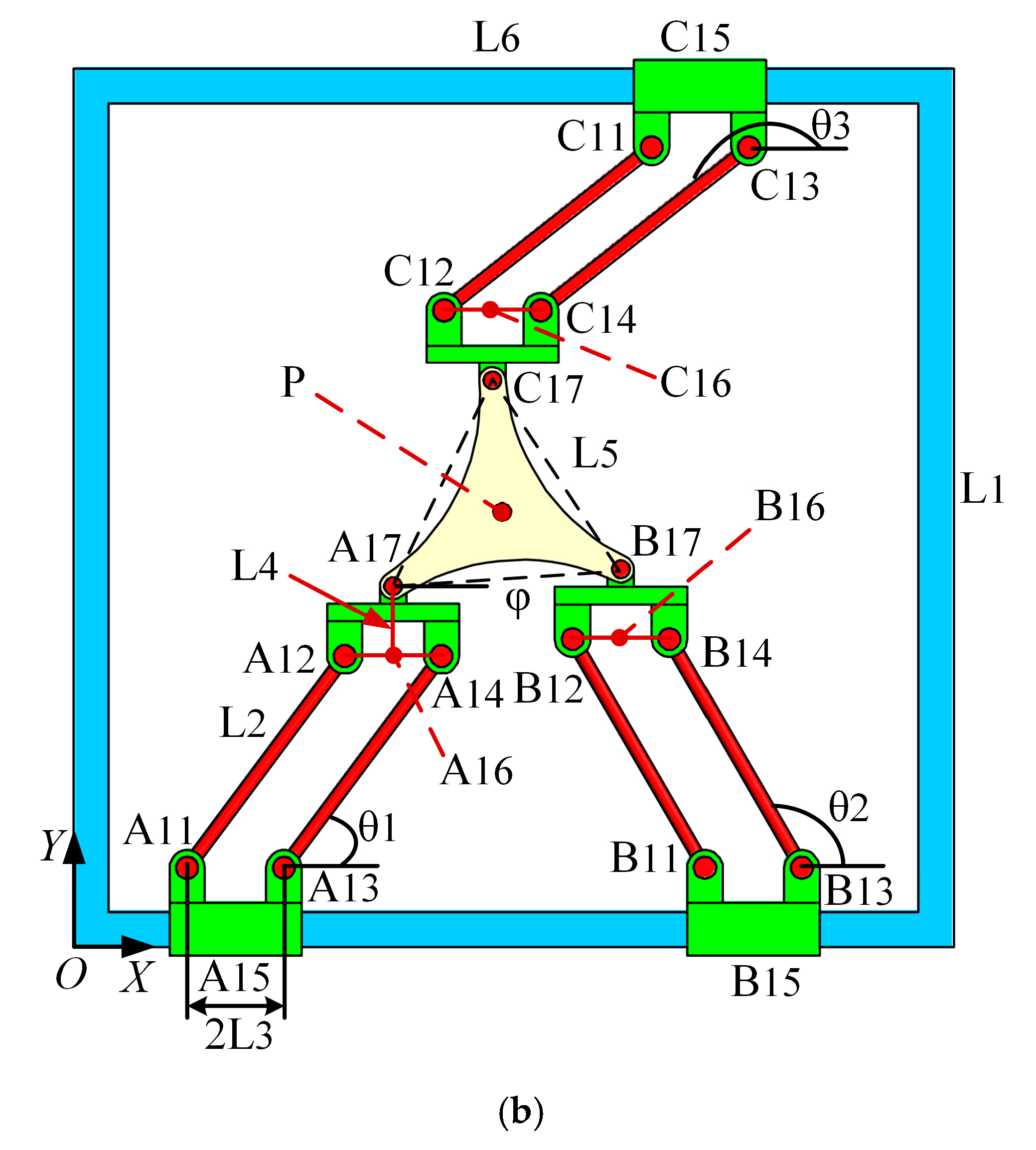
2. Mechanical Design
3. Kinematic Solutions
3.1. Inverse Kinematics of the Parallel Robot
3.2. Direct Kinematics of the Parallel Robot
3.3. Kinematic Model of Z-Displacement
4. Kinematic Performance Assessments
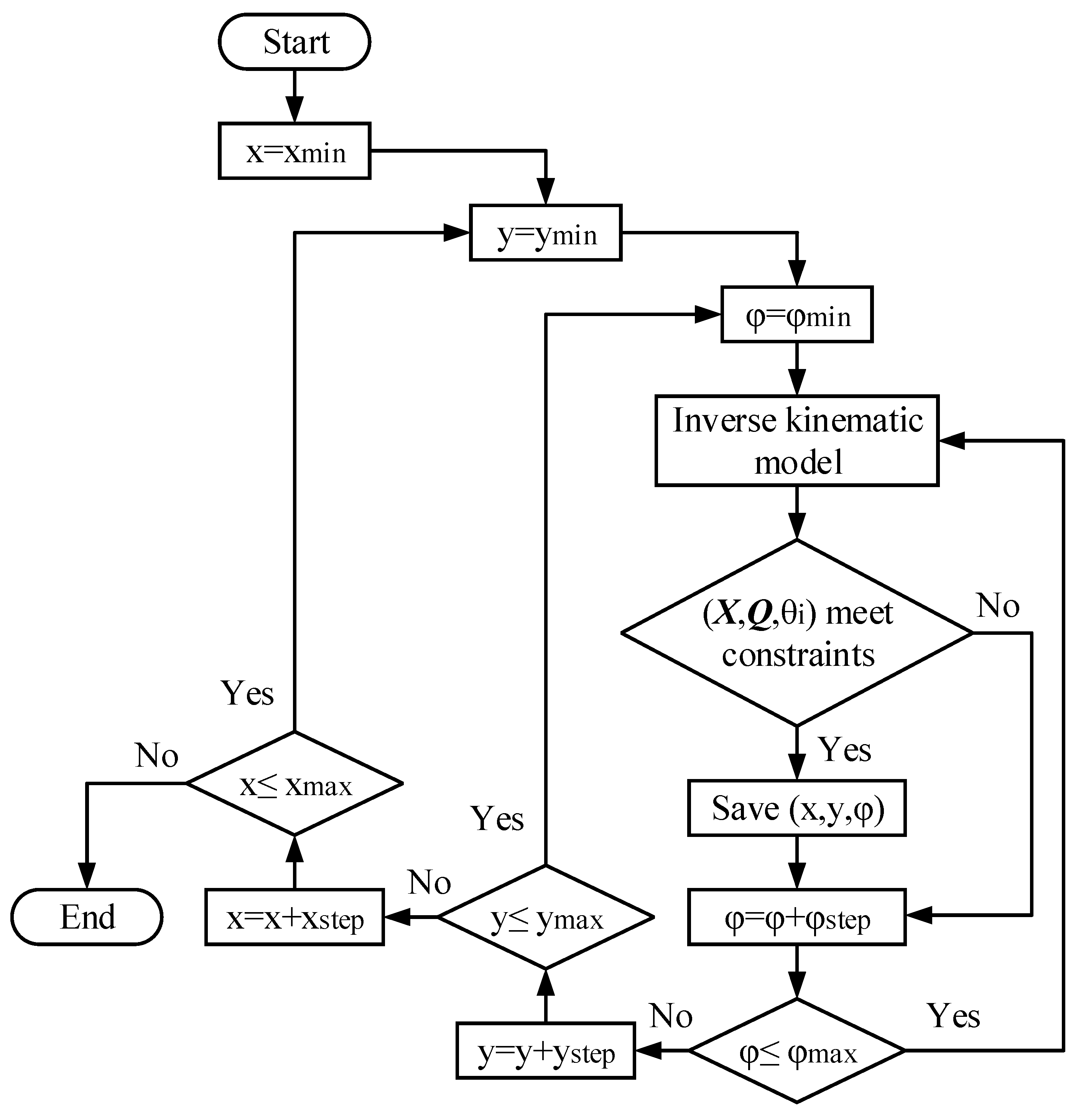
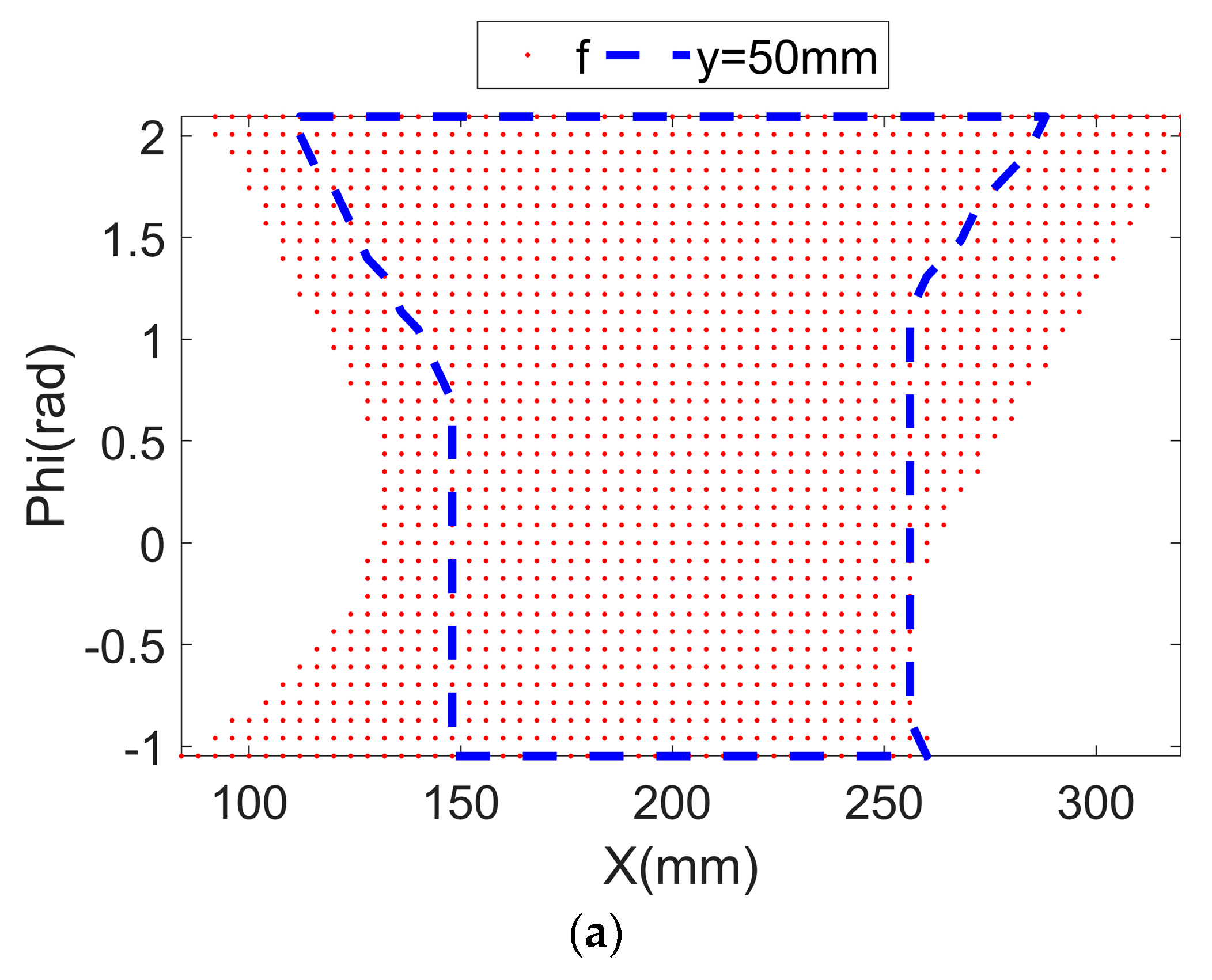
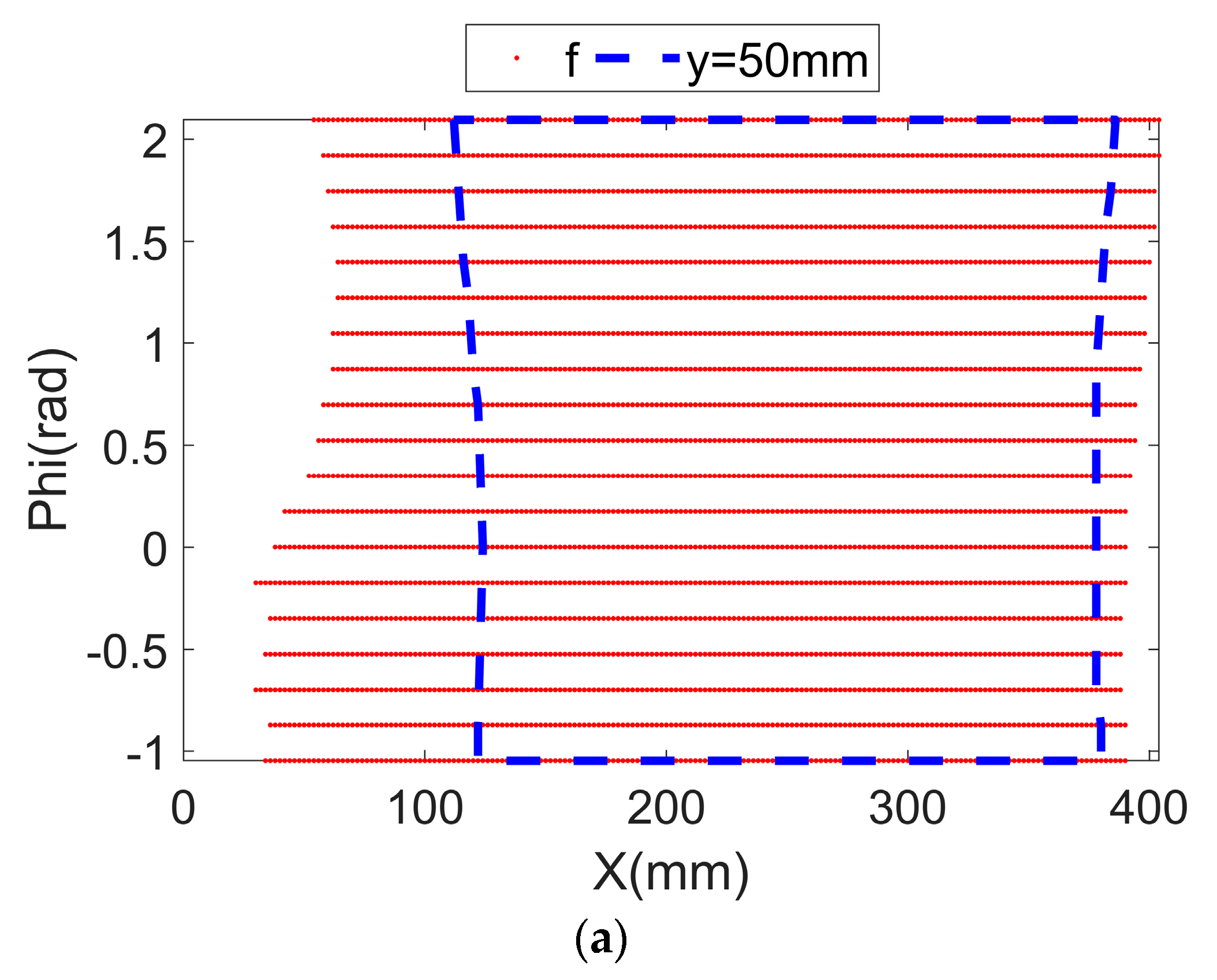
4.1. Workspace Analysis
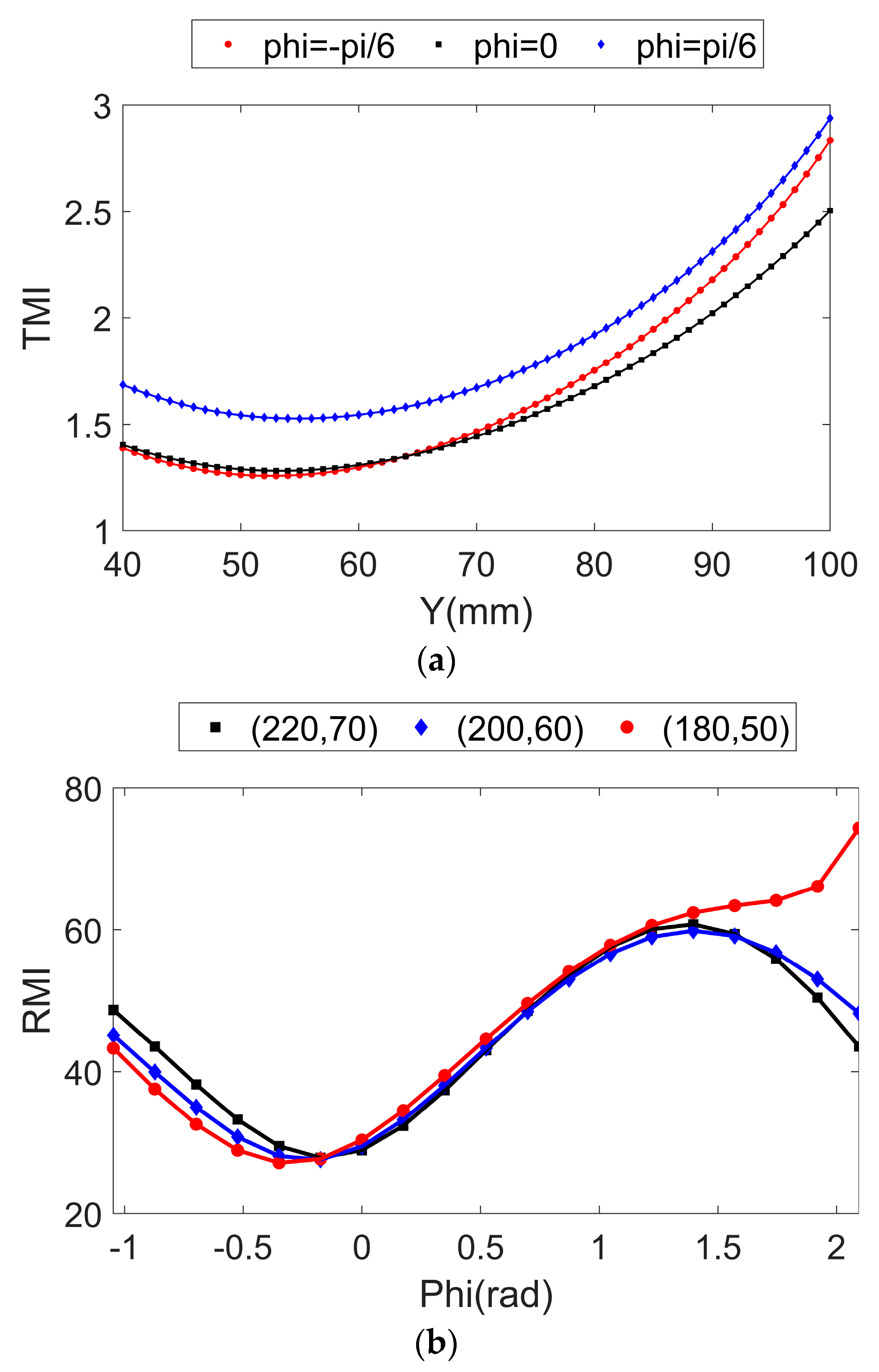
4.2. Level Index
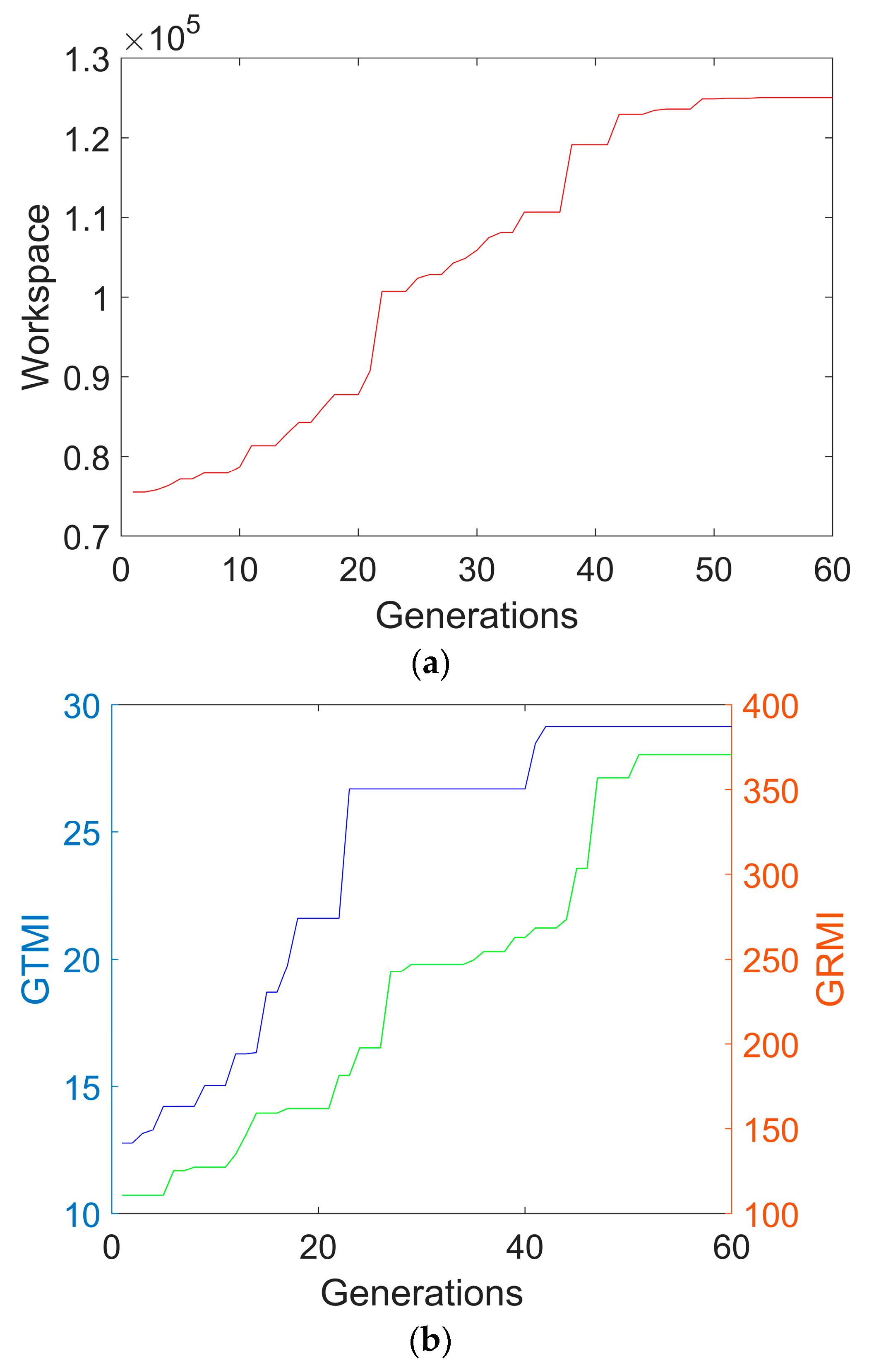
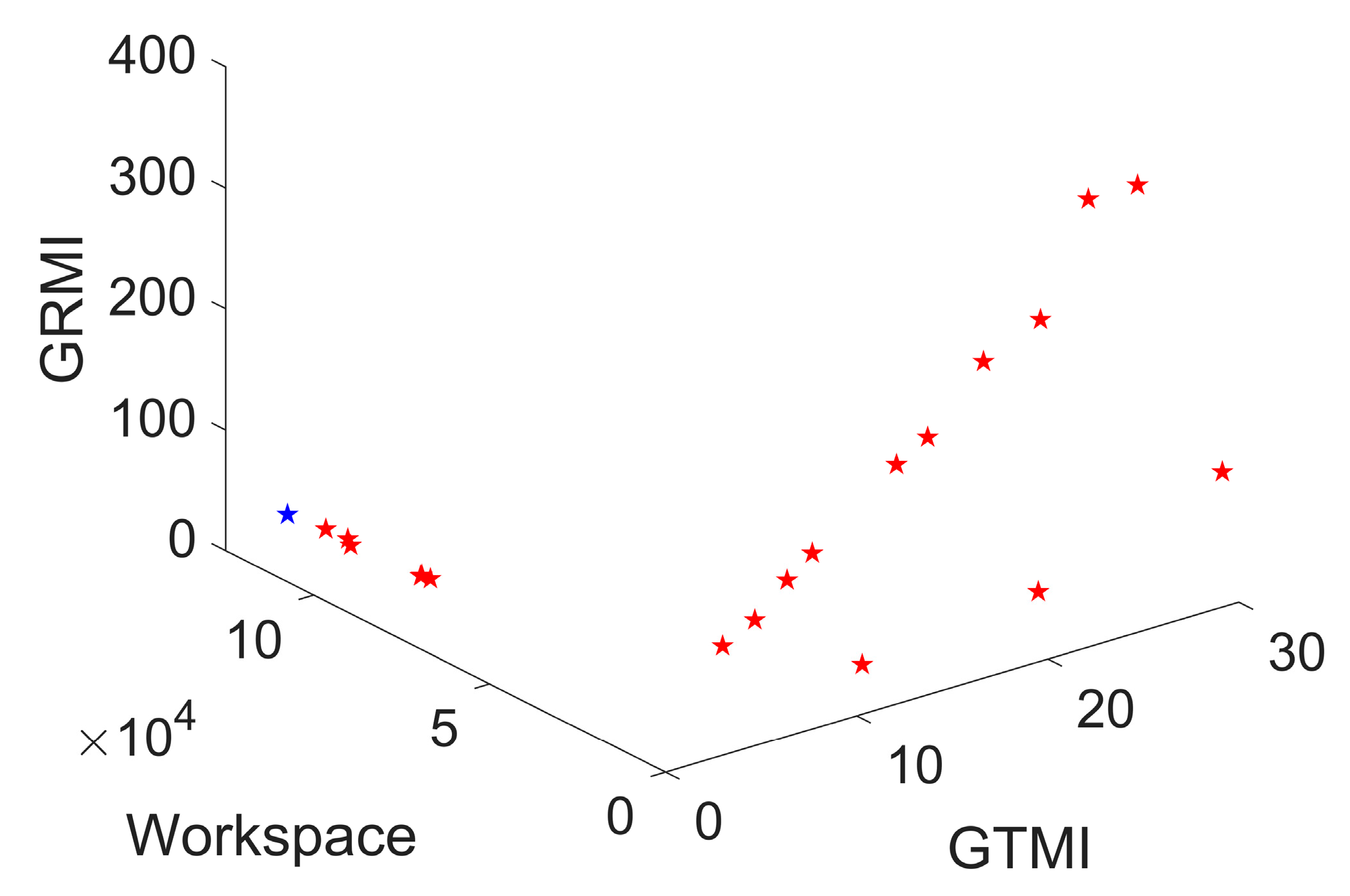
5. Dimensional Synthesis
6. Case Study
7. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, S.R.; Park, T.; Hoang, M.C.; Go, G.; Kim, C.S.; Park, J.O.; Choi, E.; Hong, A. Ascidian-inspired soft robots that can crawl, tumble, and pick-and-place objects. IEEE Robot. Autom. Lett. 2021, 6, 1722–1728. [Google Scholar] [CrossRef]
- Ghadiri, M.N.; Shavarani, S.M.; Güden, H.; Barenji, R.V. Process sequencing for a pick-and-place robot in a real-life flexible robotic cell. Int. J. Adv. Manuf. Technol. 2019, 103, 3613–3627. [Google Scholar] [CrossRef]
- Scalera, L.; Boscariol, P.; Carabin, G.; Vidoni, R.; Gasparetto, A. Enhancing energy efficiency of a 4-DOF parallel robot through task-related analysis. Machines 2020, 8, 10. [Google Scholar] [CrossRef]
- Liu, X.J.; Han, G.; Xie, F.G.; Meng, Q.Z. A novel acceleration capacity index based on motion/force transmissibility for high-speed parallel robots. Mech. Mach. Theory 2018, 126, 155–170. [Google Scholar] [CrossRef]
- Li, Y.H.; Huang, T.; Chetwynd, D.G. An approach for smooth trajectory planning of high-speed pick-and-place parallel robots using quintic B-splines. Mech. Mach. Theory 2018, 126, 479–490. [Google Scholar] [CrossRef]
- Zhao, C.; Wang, K.; Zhao, H.F.; Guo, H.W.; Liu, R.Q. Kinematics, dynamics and experiments of n (3RRlS) reconfigurable series–parallel manipulators for capturing space noncooperative targets. J. Mech. Robot. 2022, 14, 061002. [Google Scholar] [CrossRef]
- Clavel, R. Device for the Movement and Positioning of an Element in Space. U.S. Patent 4,976,582, 11 December 1990. [Google Scholar]
- Wu, M.K.; Mei, J.P.; Zhao, Y.Q.; Niu, W.T. Vibration reduction of delta robot based on trajectory planning. Mech. Mach. Theory 2020, 153, 104004. [Google Scholar] [CrossRef]
- Carabin, G.; Scalera, L.; Wongratanaphisan, T.; Vidoni, R. An energy-efficient approach for 3D printing with a Linear Delta Robot equipped with optimal springs. Robot. Comput. Integr. Manuf. 2021, 67, 102045. [Google Scholar] [CrossRef]
- Shen, H.P.; Meng, Q.M.; Li, J.; Deng, J.M.; Wu, G.L. Kinematic sensitivity, parameter identification and calibration of a non-fully symmetric parallel Delta robot. Mech. Mach. Theory 2021, 161, 104311. [Google Scholar] [CrossRef]
- Belzile, B.; Eskandary, P.K.; Angeles, J. Workspace determination and feedback control of a pick-and-place parallel robot: Analysis and experiments. IEEE Robot. Autom. Lett. 2019, 5, 40–47. [Google Scholar] [CrossRef]
- Staicu, S.; Shao, Z.F.; Zhang, Z.K.; Tang, X.Q.; Wang, L.P. Kinematic analysis of the X4 translational–rotational parallel robot. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418803849. [Google Scholar] [CrossRef]
- Mo, J.; Shao, Z.F.; Guan, L.W.; Xie, F.G.; Tang, X.Q. Dynamic performance analysis of the X4 high-speed pick-and-place parallel robot. Robot. Comput. Integr. Manuf. 2017, 46, 48–57. [Google Scholar] [CrossRef]
- Han, G.; Xie, F.G.; Liu, X.J. Evaluation of the power consumption of a high-speed parallel robot. Front. Mech. Eng. 2018, 13, 167–178. [Google Scholar] [CrossRef]
- Rahul, K.; Raheman, H.; Paradkar, V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter. Comput. Electron. Agric. 2019, 166, 105014. [Google Scholar] [CrossRef]
- Bourbonnais, F.; Bigras, P.; Bonev, I.A. Minimum-time trajectory planning and control of a pick-and-place five-bar parallel robot. IEEE/ASME Trans. Mechatron. 2014, 20, 740–749. [Google Scholar] [CrossRef]
- Nabat, V.; Rodriguez, M.O.; Company, O.; Krut, S.; Pierrot, F. Par4: Very high speed parallel robot for pick-and-place. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 553–558. [Google Scholar]
- Briot, S.; Bonev, I.A. Pantopteron: A new fully decoupled 3DOF translational parallel robot for pick-and-place applications. J. Mech. Robot. 2009, 1, 021001. [Google Scholar] [CrossRef]
- Meng, Q.Z.; Xie, F.G.; Liu, X.J. Conceptual design and kinematic analysis of a novel parallel robot for high-speed pick-and-place operations. Front. Mech. Eng. 2018, 13, 211–224. [Google Scholar] [CrossRef]
- Huang, T.; Li, Z.X.; Li, M.; Chetwynd, D.G.; Gosselin, C.M. Conceptual design and dimensional synthesis of a novel 2-DOF translational parallel robot for pick-and-place operations. J. Mech. Des. 2004, 126, 449–455. [Google Scholar] [CrossRef]
- Huang, T.; Liu, S.T.; Mei, J.P.; Chetwynd, D.G. Optimal design of a 2-DOF pick-and-place parallel robot using dynamic performance indices and angular constraints. Mech. Mach. Theory 2013, 70, 246–253. [Google Scholar] [CrossRef]
- Du, X.Q.; Li, Y.C.; Wang, P.C.; Ma, Z.H.; Li, D.W.; Wu, C.Y. Design and optimization of solar tracker with U-PRU-PUS parallel mechanism. Mech. Mach. Theory 2021, 155, 104107. [Google Scholar] [CrossRef]
- Chong, Z.H.; Xie, F.G.; Liu, X.J.; Wang, J.S.; Niu, H.F. Design of the parallel mechanism for a hybrid mobile robot in wind turbine blades polishing. Robot. Comput. Integr. Manuf. 2020, 61, 101857. [Google Scholar] [CrossRef]
- Li, Y.B.; Wang, L.; Chen, B.; Wang, Z.S.; Sun, P.; Zheng, H.; Xu, T.T.; Qin, S.Y. Optimization of dynamic load distribution of a serial-parallel hybrid humanoid arm. Mech. Mach. Theory 2020, 149, 103792. [Google Scholar] [CrossRef]
- Wang, L.P.; Zhang, Z.K.; Shao, Z.F.; Tang, X.Q. Analysis and optimization of a novel planar 5R parallel mechanism with variable actuation modes. Robot. Comput. Integr. Manuf. 2019, 56, 178–190. [Google Scholar] [CrossRef]
- Angeles, J. Fundamentals of Robotic Mechanical Systems: Theory, Methods, and Algorithms; Springer: Cham, Switzerland, 2007. [Google Scholar]
- Wang, Y.J.; Belzile, B.; Angeles, J.; Li, Q.C. Kinematic analysis and optimum design of a novel 2PUR-2RPU parallel robot. Mech. Mach. Theory 2019, 139, 407–423. [Google Scholar] [CrossRef]
- Patel, S.; Sobh, T. Manipulator performance measures-a comprehensive literature survey. J. Intell. Robot. Syst. 2015, 77, 547–570. [Google Scholar] [CrossRef]
- Brinker, J.; Corves, B.; Takeda, Y. Kinematic performance evaluation of high-speed Delta parallel robots based on motion/force transmission indices. Mech. Mach. Theory 2018, 125, 111–125. [Google Scholar] [CrossRef]
- Zou, Q. Type Synthesis and Performance Optimization of Parallel Manipulators. Ph.D. Dissertation, York University, Toronto, ON, Canada, 2022. [Google Scholar]
- Cardou, P.; Bouchard, S.; Gosselin, C. Kinematic-sensitivity indices for dimensionally nonhomogeneous Jacobian matrices. IEEE Trans. Robot. 2010, 26, 166–173. [Google Scholar] [CrossRef]
- Khan, S.; Andersson, K.; Wikander, J. Jacobian matrix normalization—A comparison of different approaches in the context of multi-objective optimization of 6-DOF haptic devices. J. Intell. Robot. 2015, 79, 87–100. [Google Scholar] [CrossRef]
- Shentu, S.Z.; Xie, F.G.; Liu, X.J.; Gong, Z. Motion control and trajectory planning for obstacle avoidance of the mobile parallel robot driven by three tracked vehicles. Robotica 2021, 39, 1037–1050. [Google Scholar] [CrossRef]
- Niu, J.Y.; Wang, H.B.; Shi, H.M.; Pop, N.; Li, D.; Li, S.S.; Wu, S.Z. Study on structural modeling and kinematics analysis of a novel wheel-legged rescue robot. Int. J. Adv. Robot. Syst. 2018, 15, 1729881417752758. [Google Scholar] [CrossRef]
- Toquica, J.S.; Oliveira, P.S.; Souza, W.S.R.; Motta, J.M.S.T.; Borges, D.L. An analytical and a Deep Learning model for solving the inverse kinematic problem of an industrial parallel robot. Comput. Ind. Eng. 2021, 151, 106682. [Google Scholar] [CrossRef]
- KöKer, R. A genetic algorithm approach to a neural-network-based inverse kinematics solution of robotic manipulators based on error minimization. Inf. Sci. 2013, 222, 528–543. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Workspace Volume | GTMI | GRMI | |
|---|---|---|---|
| Initial linkages | 71,428 | 2.7550 | 52.7392 |
| Optimized linkages | 124,745 | 3.2327 | 14.5590 |
| Performance ratio | 174.64% | 117.34% | 27.61% |
| Motor | First Motor | Second Motor | Third Motor |
|---|---|---|---|
| RMSE of position | |||
| RMSE of velocity |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, Q.; Zhang, D.; Huang, G. Kinematic Models and the Performance Level Index of a Picking-and-Placing Hybrid Robot. Machines 2023, 11, 979. https://doi.org/10.3390/machines11100979
Zou Q, Zhang D, Huang G. Kinematic Models and the Performance Level Index of a Picking-and-Placing Hybrid Robot. Machines. 2023; 11(10):979. https://doi.org/10.3390/machines11100979
Chicago/Turabian StyleZou, Qi, Dan Zhang, and Guanyu Huang. 2023. "Kinematic Models and the Performance Level Index of a Picking-and-Placing Hybrid Robot" Machines 11, no. 10: 979. https://doi.org/10.3390/machines11100979