
Synchronization Control for a Mobile Manipulator Robot (MMR) System: A First Approach Using Trajectory Tracking Master–Slave Configuration
 ,
,  and
and
Abstract
:1. Introduction
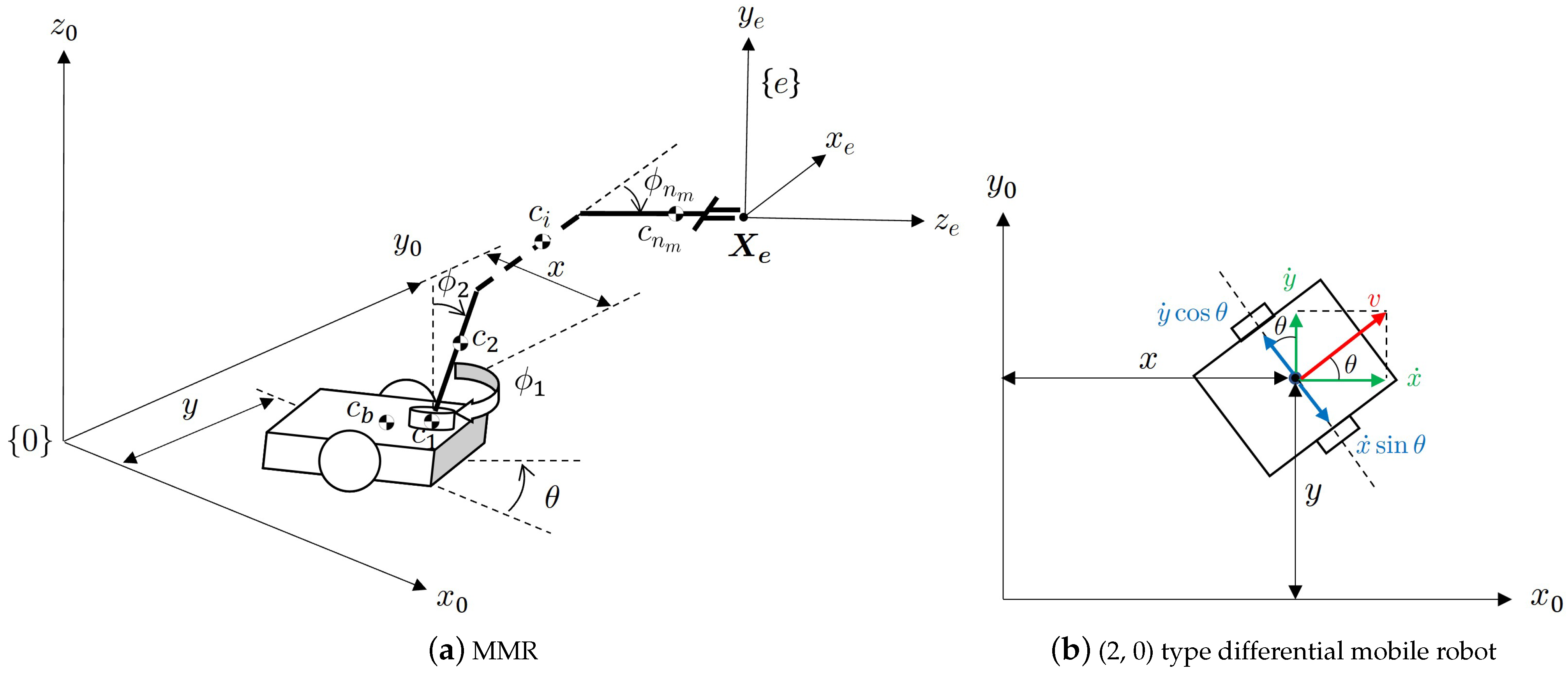
2. Problem Statement
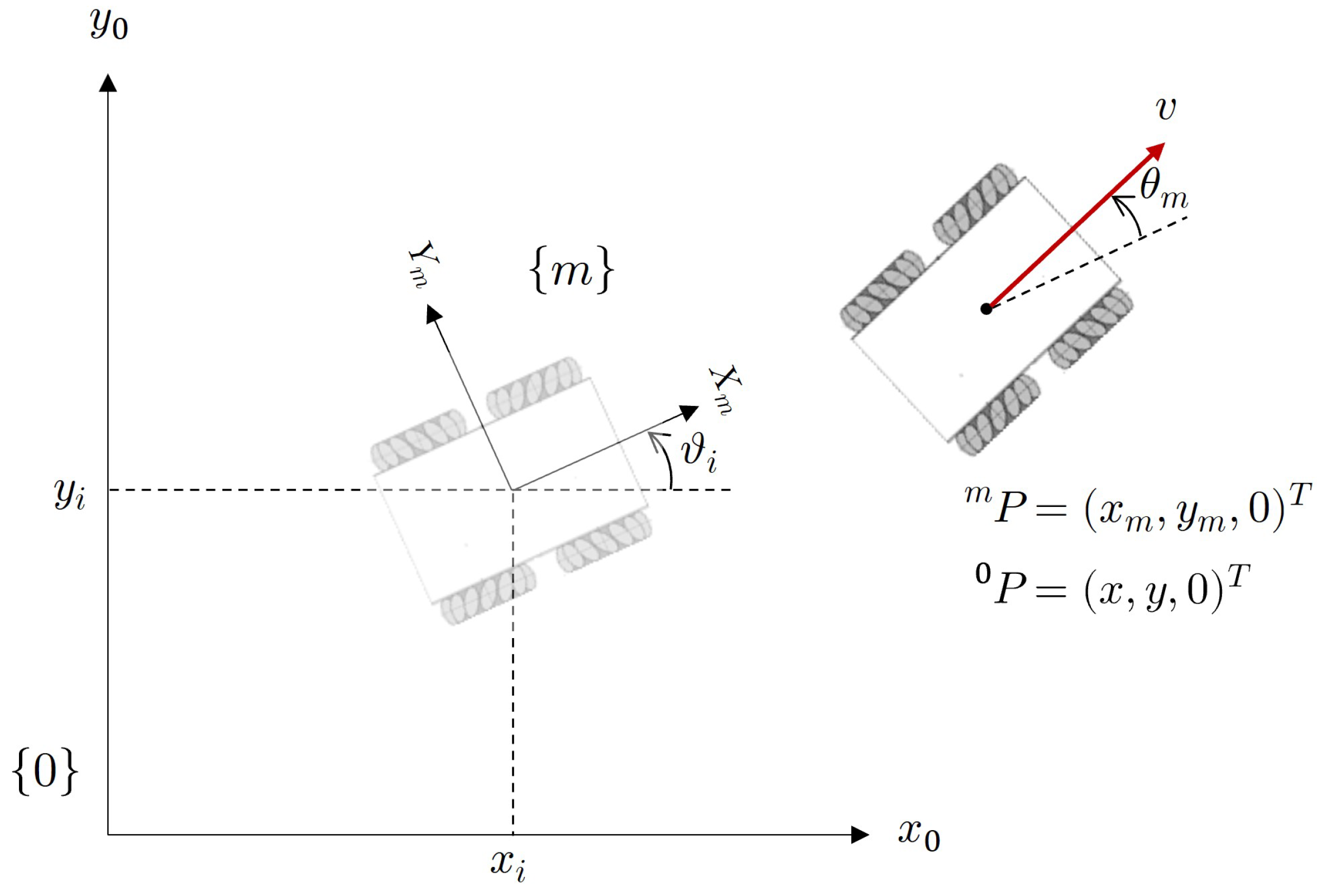
2.1. Forward and Inverse Kinematics
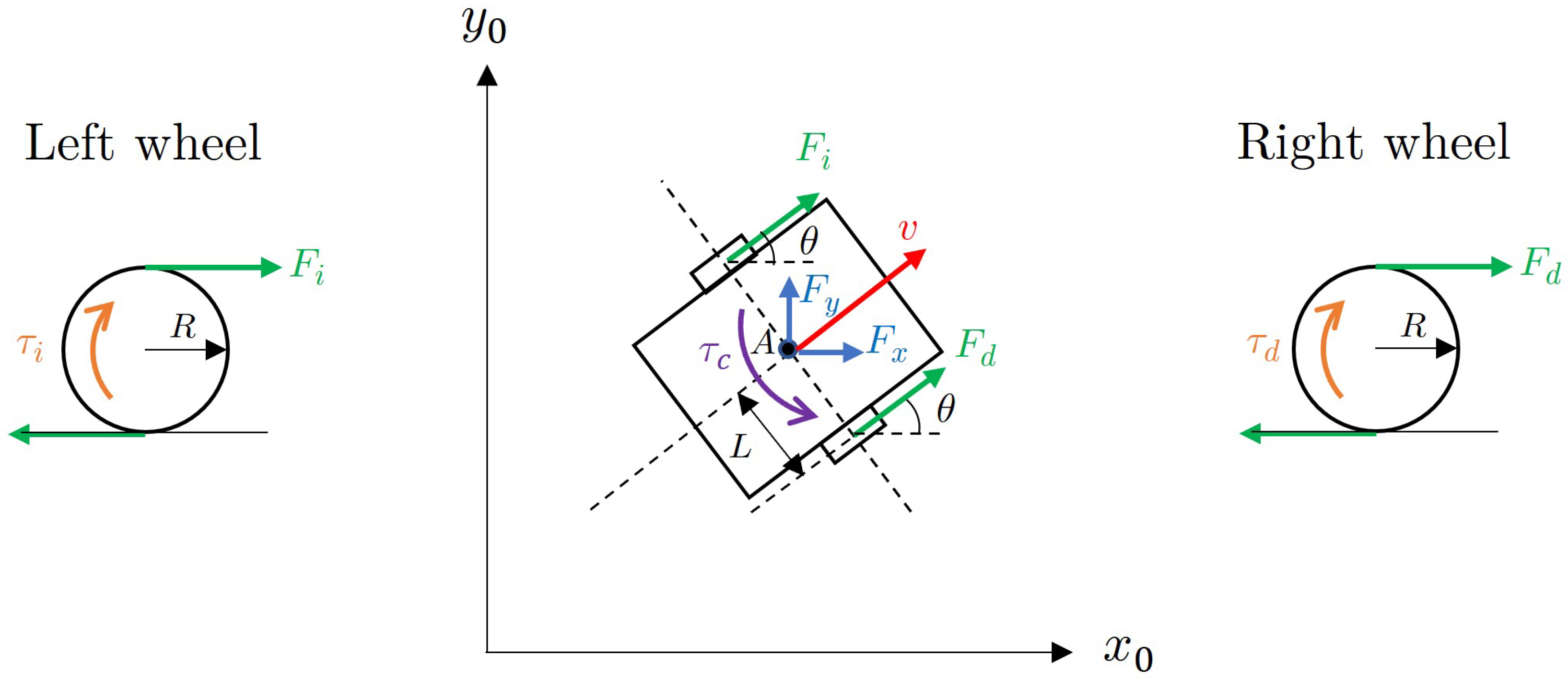
2.2. Generalized Dynamical Model
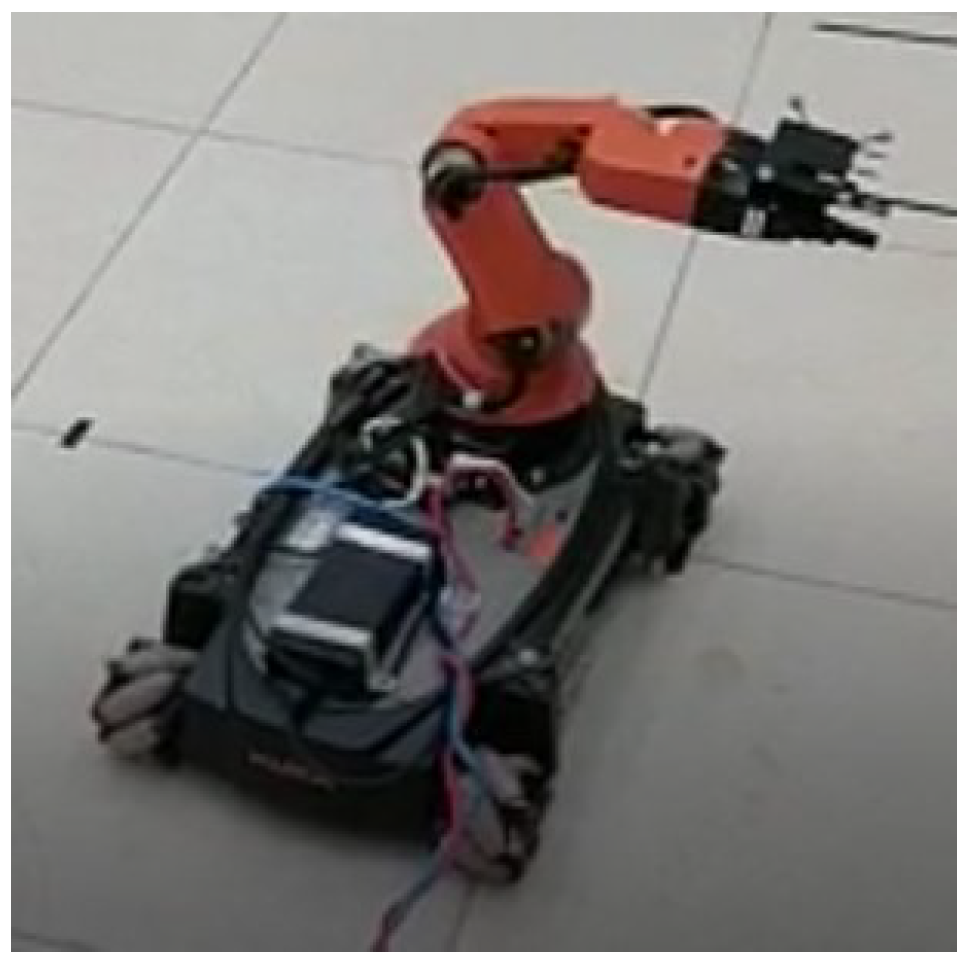
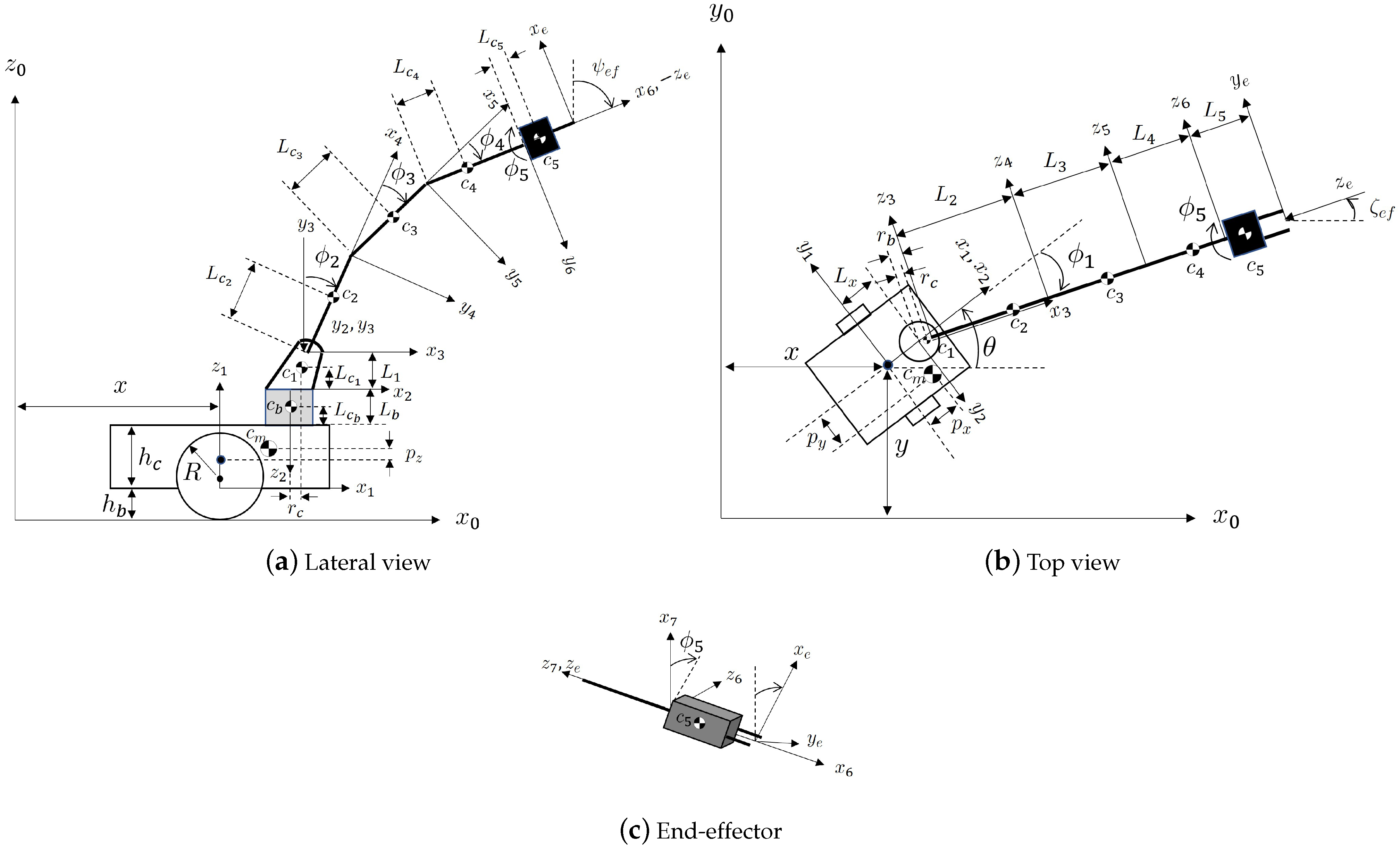
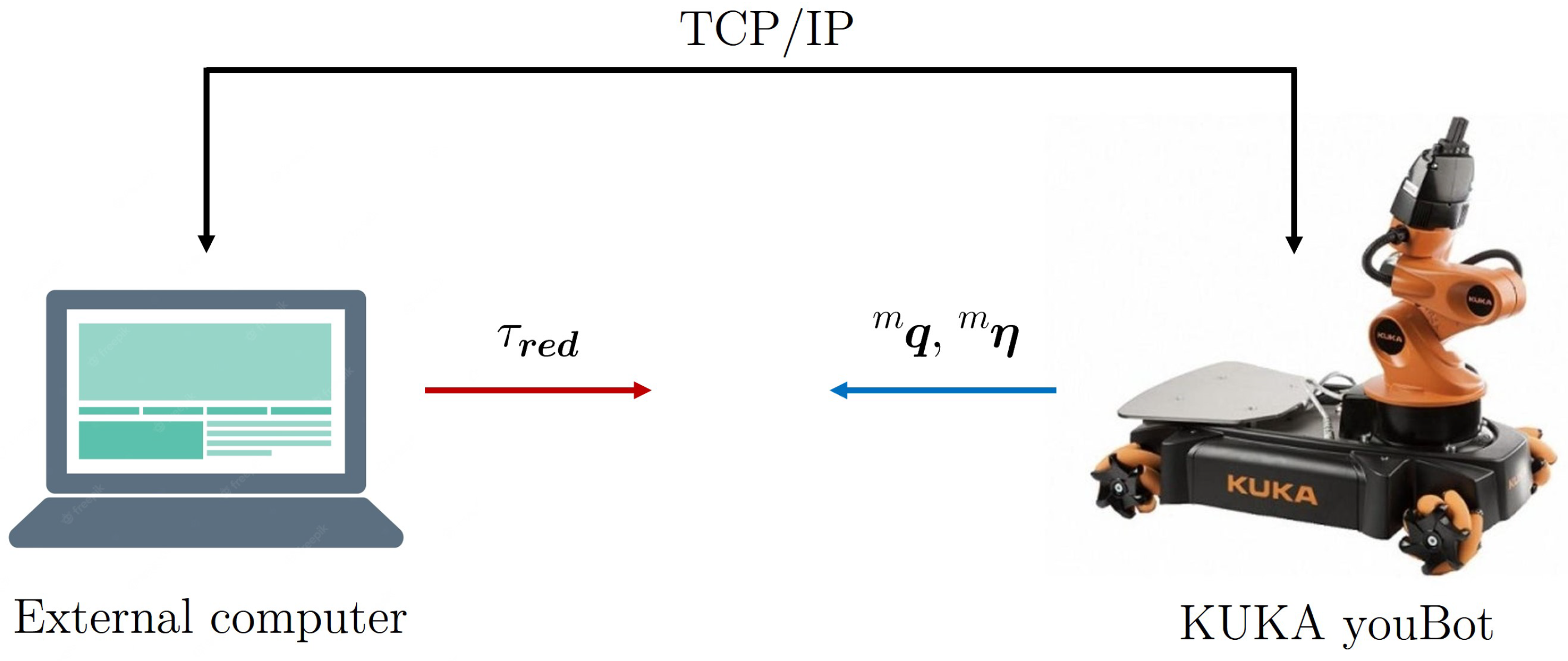
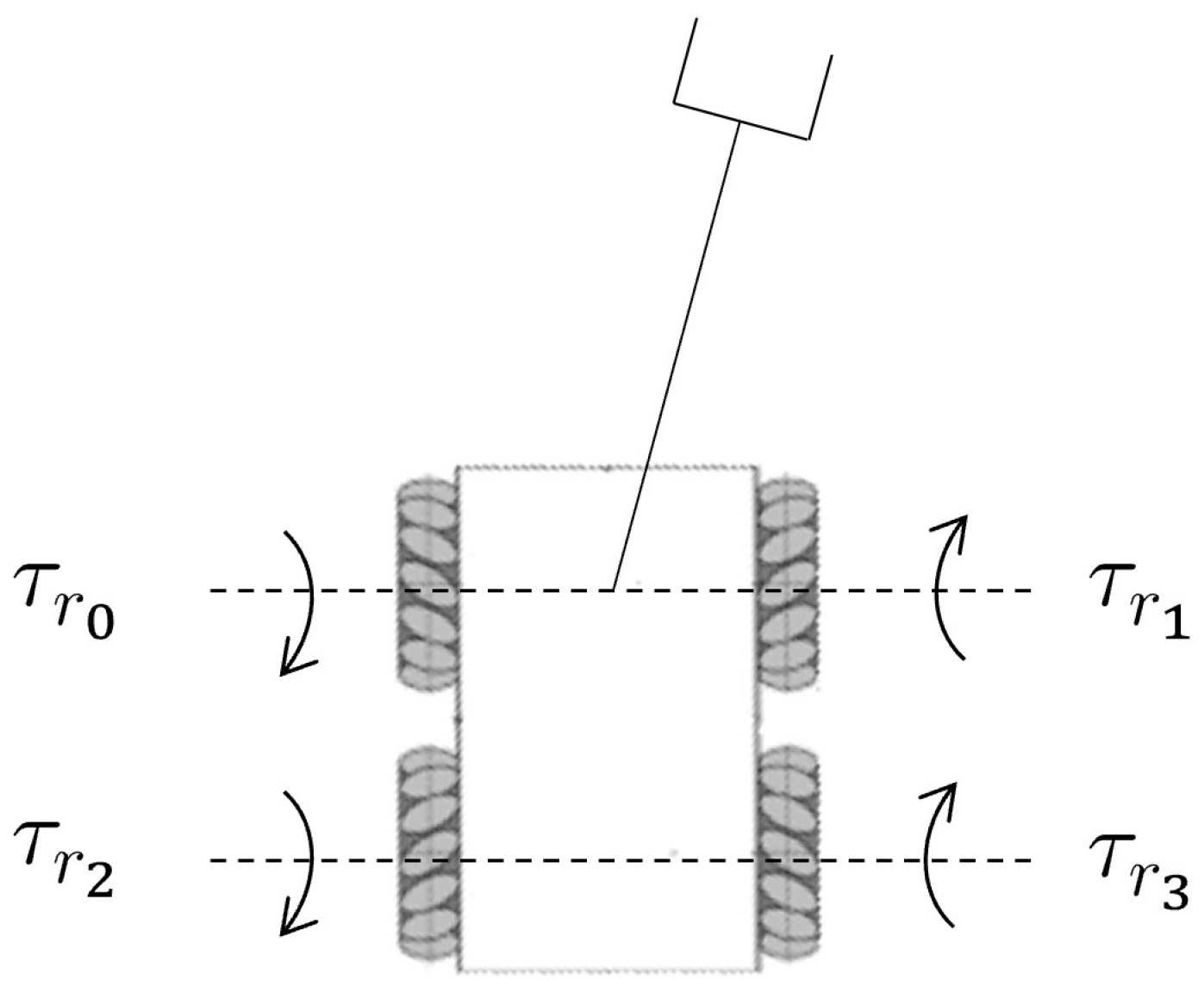
2.3. Particular Case: KUKA youBot
- The two wheels of each side rotate at the same speed.
- The robot is running on a firm ground surface.
- The four wheels are always in contact with the ground surface.
- There is no slippage between the wheels and the ground surface.
- , , , : Mobile base, fixed link, and i-th link center of mass (CoM).
- , , , : Mobile base, fixed link, and i-th link mass.
- , : Distance from the floor to mobile base, and mobile base height, respectively.
- R: Wheels radius.
- , , : Distances to the mobile base CoM.
- L: Distance measured from mobile base longitudinal axis to its wheels.
- , : i-th link length.
- , : Length to the i-th link CoM.
- , : Radius measured on the plane, from the fixed link CoM to the second link base, and to the first link CoM, respectively.
- : Distance measured on the plane, from the mobile base centroid to the fixed link centroid.
- , : i-th element inertia tensor.
- , : viscous friction coefficient related to the generalized coordinate .
2.3.1. Forward Kinematics
2.3.2. Inverse Kinematics
2.3.3. Dynamical Model
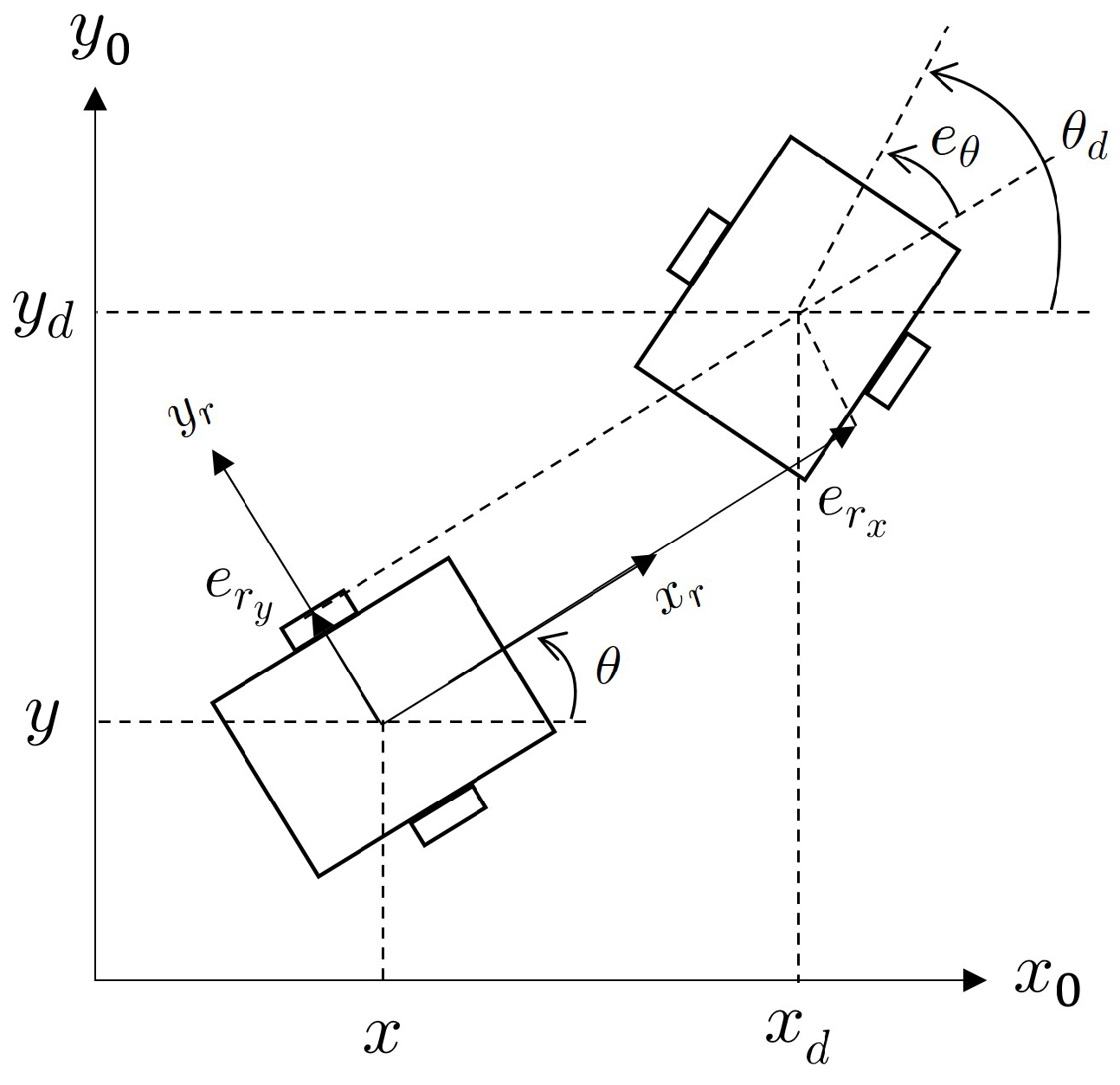
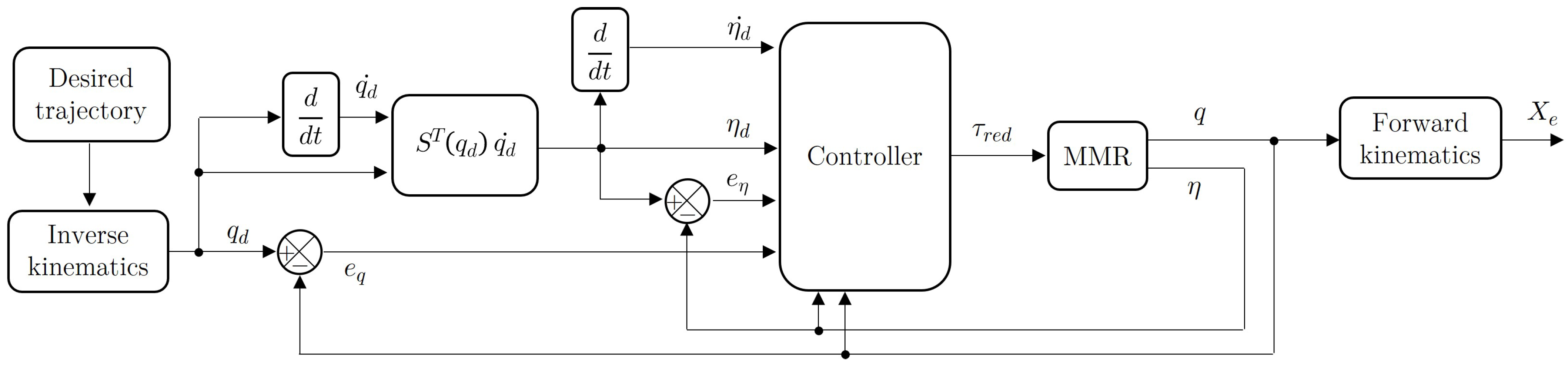
3. Trajectory Tracking Problem
3.1. Closed-Loop Dynamics
3.2. Error Dynamics
3.3. Stability Analysis
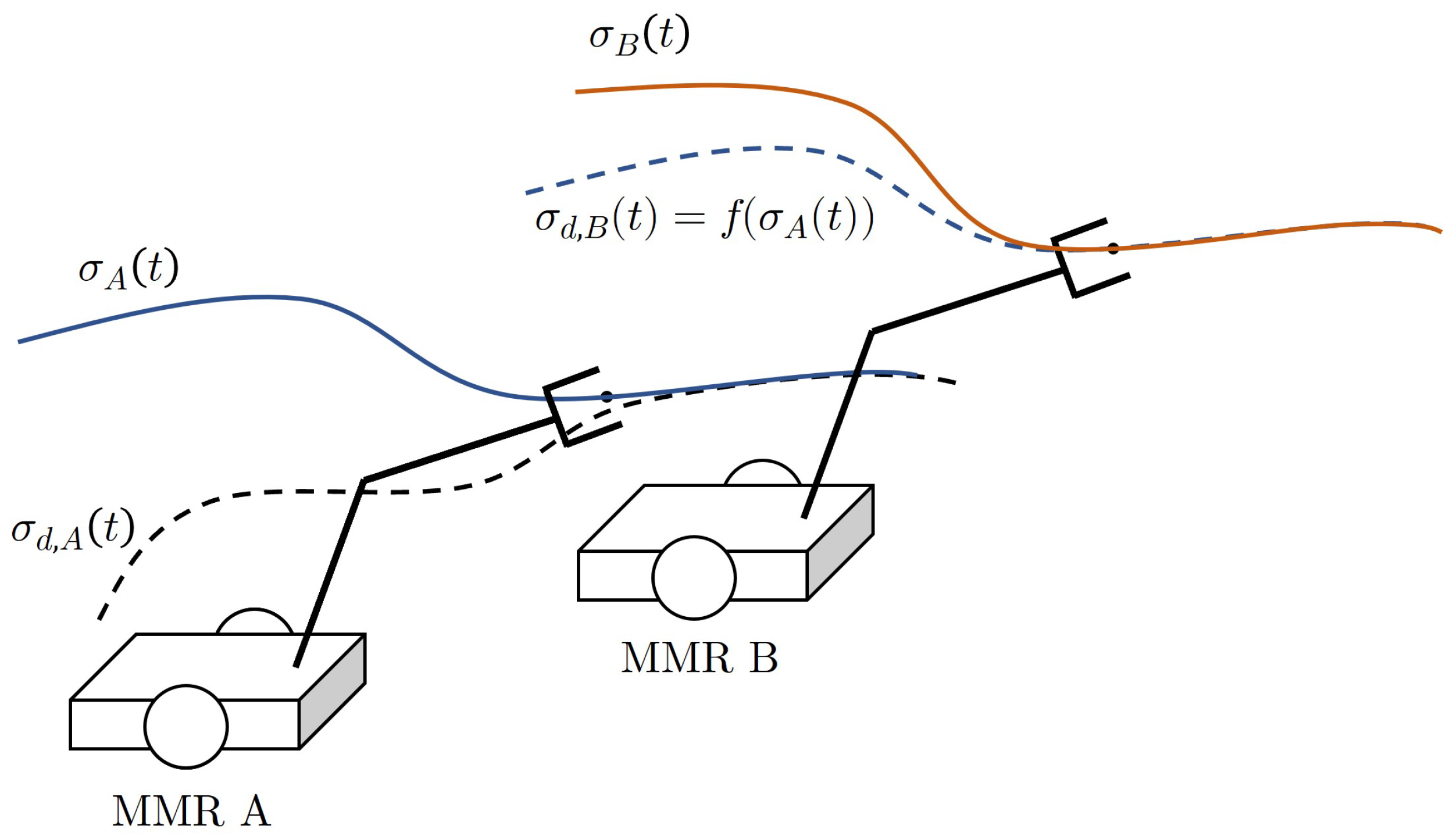
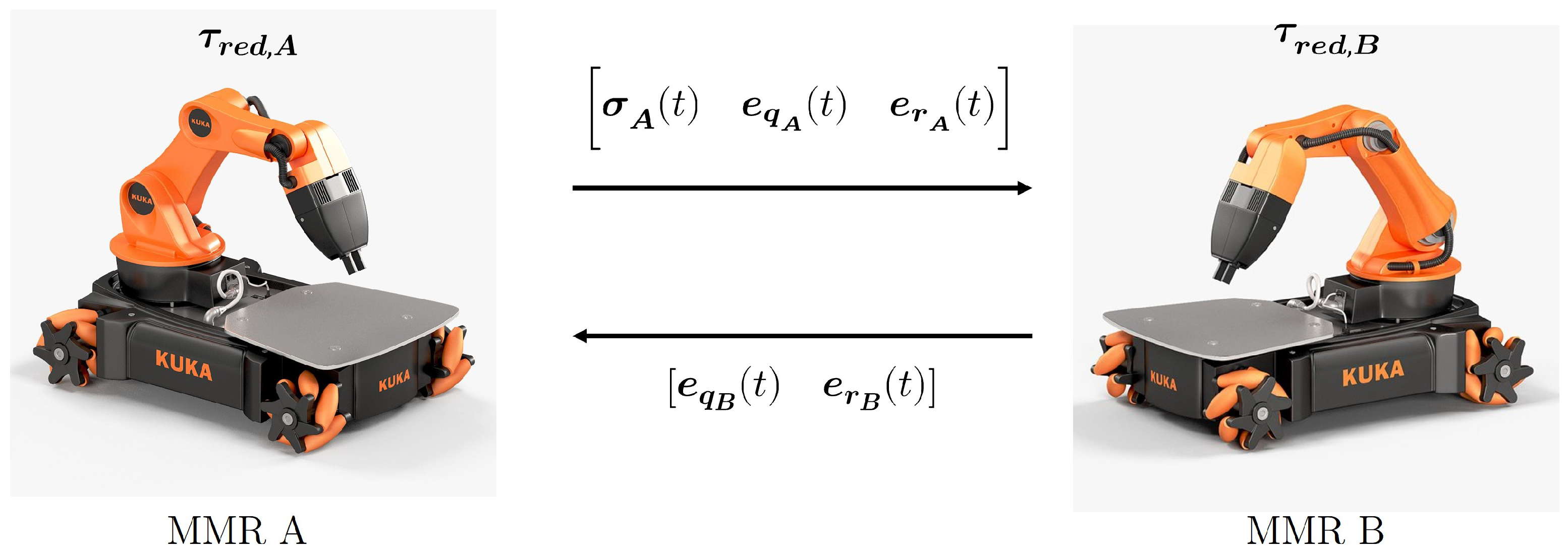
4. Synchronization Problem
5. Results
5.1. Trajectory Tracking Experimental Results
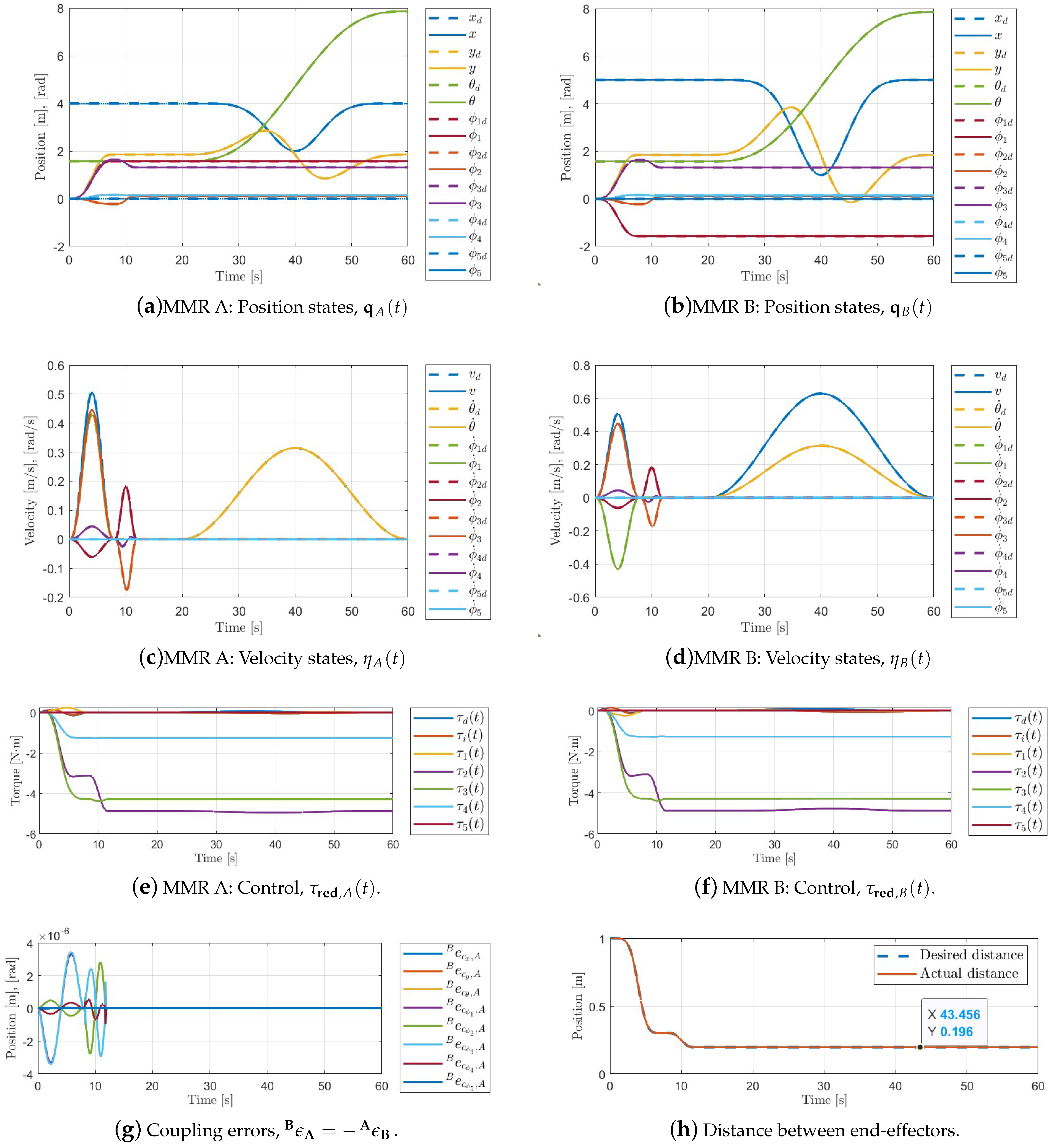
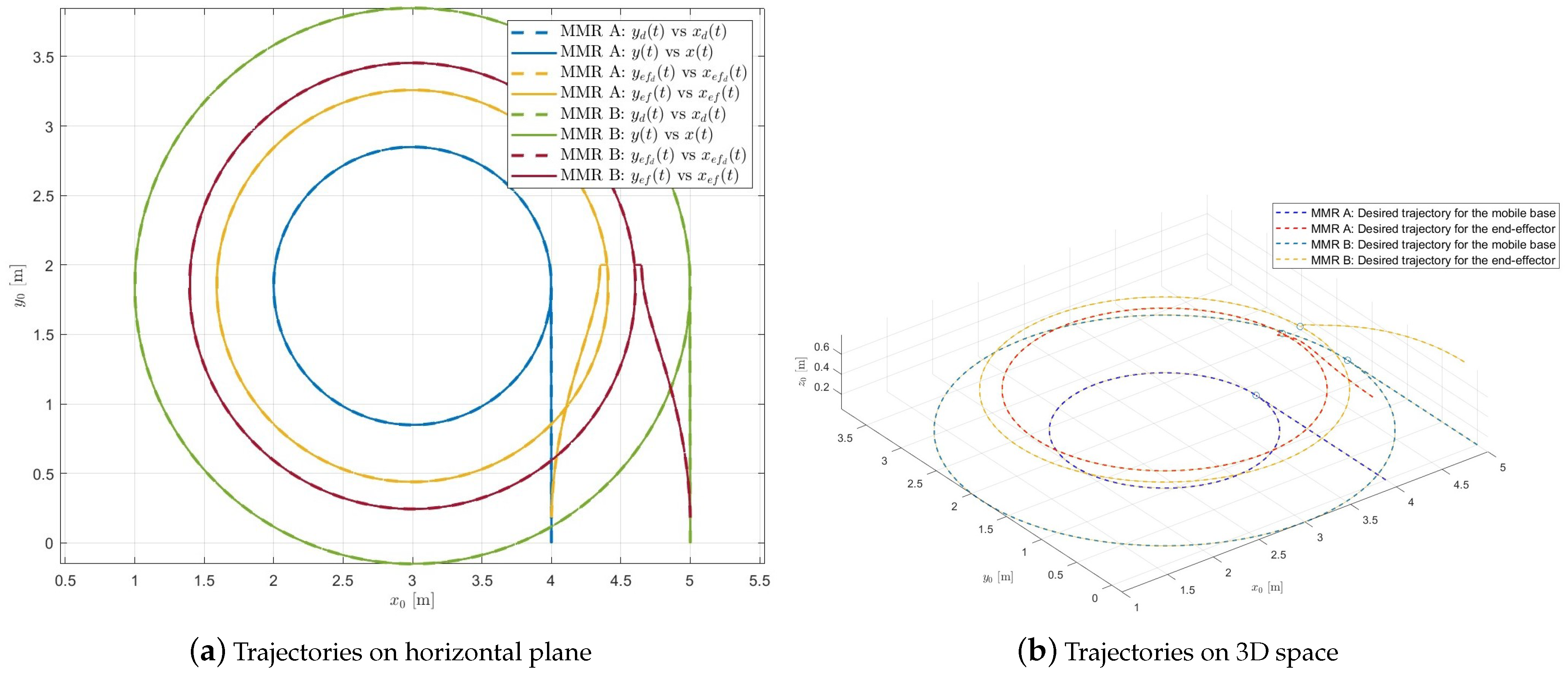
5.2. Synchronization: Numerical Simulations
- The first stage: The robot mobile base describes a straight line until the box position is reached, and the manipulator is positioned in front of the object.
- The second stage: In this stage, the end-effector makes contact with the object in a smooth manner. It is considered a punctual grip (without friction); thus, a perpendicular grip with the object is required.
- The third stage: This stage is about maintaining the position for a few seconds in order to wait for the effects of tapping that may exist between the object and the end-effector to pass, and for the grip to reach a point of stability.
- The fourth stage: The robots generate the desired circle.
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| MMR | Mobile manipulator robot |
| UUB | Uniformly and ultimately boundedness |
| DoF | Degrees of freedom |
| CoM | Center of mass |
| OS | Operating system |
Appendix A. Manipulator Stability
Appendix B. Technical Data for KUKA youBot

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| [kg] | 19.803 | [m] | 0.036 | [kg · m] | 0.0031631 |
| [kg] | 0.961 | [m] | 0.058 | [kg · m] | 0.00041967 |
| [kg] | 1.390 | [m] | 0.11397 | [kg · m] | 0.00172767 |
| [kg] | 1.318 | [m] | 0.104 | [kg · m] | 0.0018468 |
| [kg] | 0.821 | [m] | 0.053 | [kg · m] | 0.0006610 |
| [kg] | 0.769 | [m] | 0.016 | [kg · m] | 0.0006764 |
| [kg] | 0.906 | [m] | 0.033 | [kg · m] | 0.0010573 |
| [m] | 0.030 | [m] | 0.0255 | [kg · m] | 0.0005563 |
| [m] | 0.110 | [m] | 0.151 | [kg · m] | 0.0003926 |
| R [m] | 0.050 | [kg · m] | 0.2657 | [kg · m] | 0.0002756 |
| [m] | 0 | [kg · m] | 0.5875 | [N s/m] | 0.8 |
| [m] | 0 | [kg · m] | 0.5875 | [N s/m] | 0.8 |
| [m] | -0.001 | [kg · m] | 0.00041515 | [N s/m] | 0.7 |
| L [m] | 0.150 | [kg · m] | 0.003553778 | [N s/m] | 0.5 |
| [m] | 0.072 | [kg · m] | 0.00041515 | [N s/m] | 0.5 |
| [m] | 0.075 | [kg · m] | 0.0058821 | [N s/m] | 0.5 |
| [m] | 0.155 | [kg · m] | 0.0029525 | [N s/m] | 0.5 |
| [m] | 0.135 | [kg · m] | 0.0060091 | [N s/m] | 0.5 |
| [m] | 0.081 | [kg · m] | 0.0005843 | ||
| [m] | 0.137 | [kg · m] | 0.0031145 |
References
- Wang, C.; Sun, D. A synchronization control strategy for multiple robot systems using shape regulation technology. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 467–472. [Google Scholar] [CrossRef]
- Markus, E.D. Differential Flatness Based Synchronization Control of Multiple Heterogeneous Robots. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 3659–3664. [Google Scholar] [CrossRef]
- Fathallah, M.; Abdelhedi, F.; Derbel, N. Synchronization of multi-robot manipulators based on high order sliding mode control. In Proceedings of the 2017 International Conference on Smart, Monitored and Controlled Cities (SM2C), Sfax, Tunisia, 17–19 February 2017; pp. 138–142. [Google Scholar] [CrossRef]
- Cicek, E.; Dasdemir, J. Output feedback synchronization of multiple robot systems under parametric uncertainties. Trans. Inst. Meas. Control 2017, 39, 277–287. [Google Scholar] [CrossRef]
- Cicek, E.; Dasdemir, J.; Zergeroglu, E. Coordinated synchronization of multiple robot manipulators with dynamical uncertainty. Trans. Inst. Meas. Control 2015, 37, 672–683. [Google Scholar] [CrossRef]
- Portillo-Vélez, R.d.J.; Cruz-Villar, C.A.; Rodríguez-Ángeles, A. On-line master/slave robot system synchronization with obstacle avoidance. Stud. Inform. Control 2012, 21, 17–26. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Y.; Ding, W.; Tao, B.; Ding, H. A Dual-Arm Robot Cooperation Framework Based on a Nonlinear Model Predictive Cooperative Control. IEEE/ASME Trans. Mechatron. 2023, 1–13. [Google Scholar] [CrossRef]
- Rosales-Hernández, F.; Velasco-Villa, M.; Castro-Linares, R.; del Muro-Cuéllar, B.; Hernández-Pérez, M.Á. Synchronization strategy for differentially driven mobile robots: Discrete-time approach. Int. J. Robot. Autom. 2015, 30, 50–59. [Google Scholar] [CrossRef]
- Sun, D.; Wang, C.; Shang, W.; Feng, G. A Synchronization Approach to Trajectory Tracking of Multiple Mobile Robots While Maintaining Time-Varying Formations. IEEE Trans. Robot. 2009, 25, 1074–1086. [Google Scholar] [CrossRef]
- Li, H.; Jiang, W.; Zou, D.; Yan, Y.; Zhang, A.; Chen, W. Robust motion control for multi-split transmission line four-wheel driven mobile operation robot in extreme power environment. Ind. Robot. Int. J. Robot. Res. Appl. 2020. ahead-of-print. [Google Scholar] [CrossRef]
- Algrnaodi, M.; Saad, M.; Saad, M.; Fareh, R.; Kali, Y. Extended state observer–based improved non-singular fast terminal sliding mode for mobile manipulators. Trans. Inst. Meas. Control 2023. ahead-of-print. [Google Scholar] [CrossRef]
- Shafei, A.M.; Mirzaeinejad, H. A novel recursive formulation for dynamic modeling and trajectory tracking control of multi-rigid-link robotic manipulators mounted on a mobile platform. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 235, 1204–1217. [Google Scholar] [CrossRef]
- Portillo Vélez, R.d.J. Control Multilateral de Agarre para Robots Cooperativos Maestro/Multi-Esclavo. Ph.D. Thesis, CINVESTAV, Zacatenco, Mexico, 2013. [Google Scholar]
- Fierro, R.; Lewis, F. Control of a nonholonomic mobile robot: Backstepping kinematics into dynamics. In Proceedings of the 1995 34th IEEE Conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; Volume 4, pp. 3805–3810. [Google Scholar] [CrossRef]
- Bischoff, R.; Huggenberger, U.; Prassler, E. KUKA youBot—A mobile manipulator for research and education. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Galati, R.; Mantriota, G. Path Following for an Omnidirectional Robot Using a Non-Linear Model Predictive Controller for Intelligent Warehouses. Robotics 2023, 12, 78. [Google Scholar] [CrossRef]
- Wang, T.; Wu, Y.; Liang, J.; Han, C.; Chen, J.; Zhao, Q. Analysis and Experimental Kinematics of a Skid-Steering Wheeled Robot Based on a Laser Scanner Sensor. Sensors 2015, 15, 9681–9702. [Google Scholar] [CrossRef] [PubMed]
- Fuentevilla, G. Definiciones del Modelo KUKA youBot. 2022. Available online: https://drive.google.com/file/d/1O_iH2lNSz0y-z2rv-nDqPhUTe0-oBxVb/view?usp=sharing (accessed on 7 September 2023).
- Gutiérrez, H.; Morales, A.; Nijmeijer, H. Synchronization Control for a Swarm of Unicycle Robots: Analysis of Different Controller Topologies. Asian J. Control 2017, 19, 1822–1833. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Control; Pearson Education: Upper Saddle River, NJ, USA, 2015. [Google Scholar]
- Gómez León, B.C. Control de Manipulador Móvil Subactuado, Provisto de Unión Flexible. Master’s Thesis, CINVESTAV, Zacatenco, Mexico, 2021. [Google Scholar]
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Pearson Education: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- MediaWiki. Main Page-youBot Wiki. 2015. Available online: http://www.youbot-store.com/wiki/index.php/Main_Page (accessed on 7 September 2023).















| 700 | 555 | 300 | 1000 | 1000 | 2000 | 2500 | 100 | 400 | 720 | 350 | 350 | 350 | 350 | 350 |
| 50 | 50 | 200 | 400 | 400 | 400 | 400 | 400 | 50 | 50 | 50 | 50 | 50 | 50 | 50 |
| 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 800 | 800 | 800 | 800 | 800 | 800 | 800 | 800 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Fuentevilla, J.G.; Morales-Díaz, A.B.; Rodríguez-Ángeles, A. Synchronization Control for a Mobile Manipulator Robot (MMR) System: A First Approach Using Trajectory Tracking Master–Slave Configuration. Machines 2023, 11, 962. https://doi.org/10.3390/machines11100962
Pérez-Fuentevilla JG, Morales-Díaz AB, Rodríguez-Ángeles A. Synchronization Control for a Mobile Manipulator Robot (MMR) System: A First Approach Using Trajectory Tracking Master–Slave Configuration. Machines. 2023; 11(10):962. https://doi.org/10.3390/machines11100962
Chicago/Turabian StylePérez-Fuentevilla, Jorge Gustavo, América Berenice Morales-Díaz, and Alejandro Rodríguez-Ángeles. 2023. "Synchronization Control for a Mobile Manipulator Robot (MMR) System: A First Approach Using Trajectory Tracking Master–Slave Configuration" Machines 11, no. 10: 962. https://doi.org/10.3390/machines11100962