

Refined Composite Multiscale Fluctuation Dispersion Entropy and Supervised Manifold Mapping for Planetary Gearbox Fault Diagnosis

Abstract
:1. Introduction
- A novel RCMFDE method is developed to extract planetary gearbox fault features.
- An entropy-manifold-based feature extraction technique is proposed to mine the sensitive components by combining the RCMFDE and S-Iso.
- A fault detection scheme for planetary gearboxes is developed based on the entropy-manifold characteristics and MPA-SVM.
- Planetary gearbox fault diagnosis experiments are carried out to assess the viability of the suggested approaches. The results show that the RCMFDE outperforms the existing MFDE [17] and multi-scale permutation entropy (MPE) [8] for feature extraction. The dimensionality reduction of the S-Iso is better than the well-established PCA [22], LDA [21], and Isomap [25]. The suggested scheme can accurately determine various planetary gearbox faults.
2. Refined Composite Multiscale Fluctuation Dispersion Entropy Method
2.1. Multiscale Fluctuation Dispersion Entropy
- 5.
- The new coarse-grained sequences are constructed by:where s is the scaling factor, and denotes the value of the j-th new sequence.
- 6.
- The are mapped to between 1 and c.where is the expectation, is the variance, c is the category, W = {Wi} represents the mapping result, and R is the rounding function.
- 7.
- The mapping result W is reconstructed by:where m is the embedding dimension and t is the time delay. is the j-th reconstructed vector.
- 8.
- The reconstruction result is transformed to the fluctuation dispersion result .where denotes the j-th fluctuation dispersion.There is a specific fluctuation dispersion pattern for each time series: , , ..., . Then, every pattern’s probability is determined by:
- 9.
- The entropy values of the MFDE are computed by:
2.2. Refined Composite Multiscale Fluctuation Dispersion Entropy
- 10.
- The composite coarse-grained technique with Equation (8) was used instead of the traditional one. A comparison of these two methods is displayed in Figure 2. Compared with the conventional coarse-grained technique, the composite coarse-grained technique can more fully exploit useful information from the time series.
- 11.
- The fluctuation dispersion pattern probabilities for each new sequence were calculated according to steps 2–4 in the MFDE.
- 12.
- The entropy values of the RCMFDE were computed using the refined arithmetic approach:where is the mean probability that each coarse-grained sequence will have a fluctuation dispersion pattern.
2.3. Simulation Experiments
- 14.
- The effect of the scale factor s on the performance of the RCMFDE is investigated. When s is too low, the RCMFDE cannot fully exploit the entropy information of the signal. Conversely, when s is excessive, the RCMFDE is prone to invalid or inaccurate entropy results at large scales. According to [17,24], the performance s is defined as 25 in the paper.
- 15.
- The effectiveness of signal length N on the performance of RCMFDE is investigated. The complexity analysis is performed using RCMFDE for noise signals with different lengths (set to 1000, 2000, 3000, and 4000), and the entropy curves are plotted in Figure 3. In this experiment, m = 2, c = 6, t = 1, and s = 25.
- 16.
- The effect of the embedding dimension m on RCMFDE performance was investigated. The complexity analysis was performed using RCMFDE for white noise signals with different values of m (set to 2, 3, 4, and 5), and the analysis results are provided in Figure 4. In this experiment, N = 3000, c = 6, t = 1, and s = 25.
- 17.
- The effect of category c on the performance of RCMFDE is investigated. The complexity analysis is performed using RCMFDE for white noise signals with different values of c (set to 5, 6, 7, and 8), and Figure 5 displays the analysis findings. The setup values for the remaining parameters are N = 3000, m = 2, t = 1, and s = 25.
- 18.
- The investigation is done into how the time delay t affects how well the RCMFDE performs. The complexity analysis was performed using RCMFDE for white noise signals with different t (set to 1, 2, 3, and 4), and the analysis results are displayed in Figure 6. In the experiment, N = 3000, m = 2, c = 6, and s = 25.
3. Planetary Gearbox Fault Diagnosis Scheme
3.1. Supervised Isometric Mapping
- 19.
- The supervisory distance matrix is constructed as follows:where is the Euclidean distance between points ai and aj, is the label of ai, is the label of aj, is the whole sample pairings’ average Euclidean distance, and is the weight parameter.
- 20.
- The neighborhood graph was created using the K-nearest neighbor algorithm. If ai is the nearest neighbor point of aj, there exists an edge connection with length ; otherwise, the edge length between these two points is infinite.
- 21.
- The geodesic distance matrix was approximated using Dijkstra’s algorithm:where min{ } is the smallest value in the set.
- 22.
- The dimensionality reduction result of Dg can be obtained by multidimensional scaling.
3.2. Marine Predators Algorithm-based Support Vector Machine
- 23.
- The input training and testing sets are normalized. The initialized population is 20, the maximum number of iterations Tmax is 100, and the predator positions are (c, g) with a maximum and minimum of [100, 100] and [0.001, 0.001], respectively.
- 24.
- The mean false recognition rate of the training set following three cross-validations constitutes the fitness function. Therefore, the entire optimization process is aimed at finding the global minimum.
- 25.
- The predators and prey locations are updated. The process can be divided into three phases:
- 26.
- Initial optimization phase (). This phase is the survey phase (i.e., the predator is moving faster than the prey), and the corresponding model can be described as follows:where RB denotes a random vector based on Brownian normal distribution, E and P are the optimal predators and prey locations, respectively, R is a random vector between [0, 1], the symbol is entry-wise multiplications, M is step size vector, and T is the current iteration.
- Middle optimization phase (). This phase is the coexistence of survey and exploitation (i.e., the predator moves at speed similar to that of the prey), and the corresponding model can be expressed as:where RL is a random vector depending on the Lévy normal distribution and CF is an adaptation parameter that regulates the predator step size.
- Post-optimization phase (). This phase is the development stage (i.e., the predator moves slower than the prey), and the corresponding model is:
- 27.
- Iterative stagnation due to local optimal points is avoided as follows:where F = 0.2. Binary vector H can either be zero or one. Xmax and Xmin are the maximum and minimum values, respectively, , and r1 and r2 are random numbers.
- 28.
- The prior historical location is replaced if the current prey position’s fitness value is lower than its historical value. Otherwise, the historical prey location is retained for the next iteration.
- 29.
- The optimization is stopped once the number of iterations is maximal, and the optimization results can be output. Then, the SVM prediction model is built according to the optimization parameters.
- 30.
- Intelligent defect diagnosis was achieved by feeding the testing set into the prediction model.
3.3. Proposed Fault Diagnosis Scheme for Planetary Gearboxes
- 31.
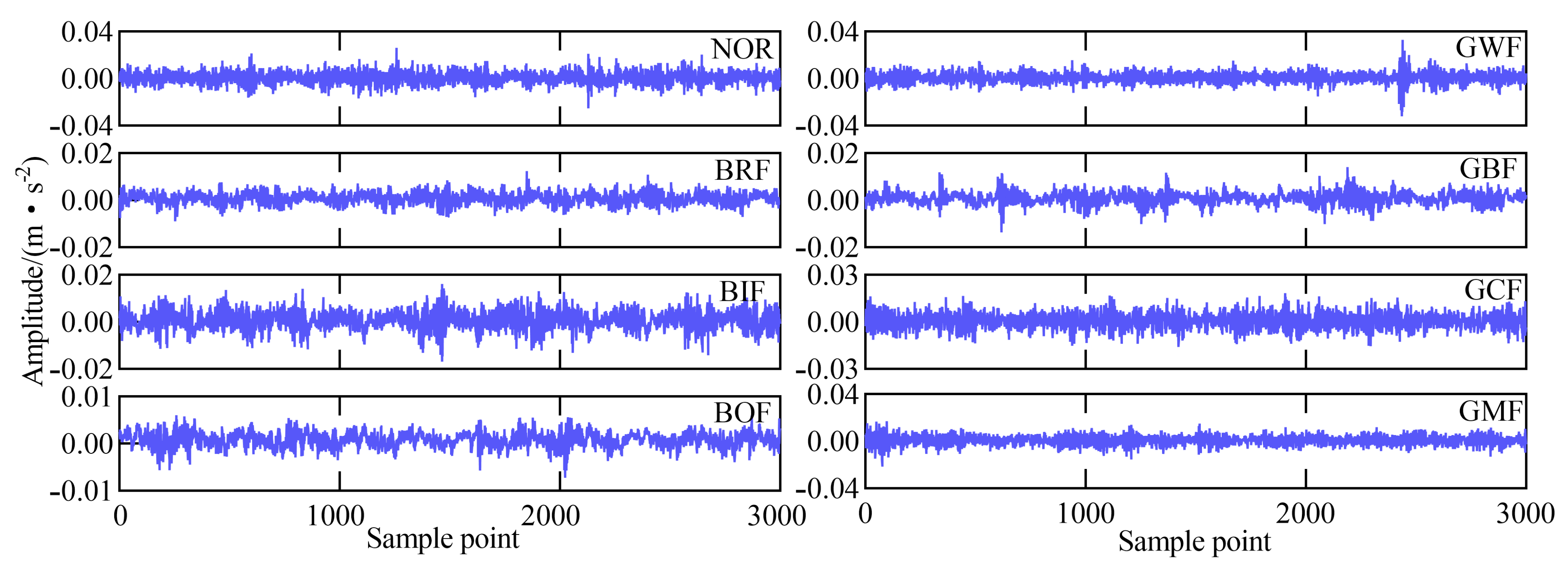
- Sensors were used to record the vibration signals of the planetary gearbox in different states. A 1:9 ratio exists between training and test samples.
- 32.
- The RCMFDE was used to extract features for each group of signals. The parameters of the RCMFDE are set as N = 3000, m = 2, c = 6, t = 1, and s = 25. Then, 25 entropy features can be obtained for each sample.
- 33.
- The dimensionality of the RCMFDE feature set decreased using the S-Iso, and the feature set with low dimensions can be constructed.
- 34.
- The training sample feature set and the testing sample feature set are normalized. The MPA-SVM prediction model is constructed using the training set, and this prediction model receives the testing set as input to achieve intelligent fault diagnosis.
4. Planetary Gearbox Fault Diagnosis Experiment
4.1. Experimental Platform and Signal Acquisition
4.2. Fault Feature Extraction
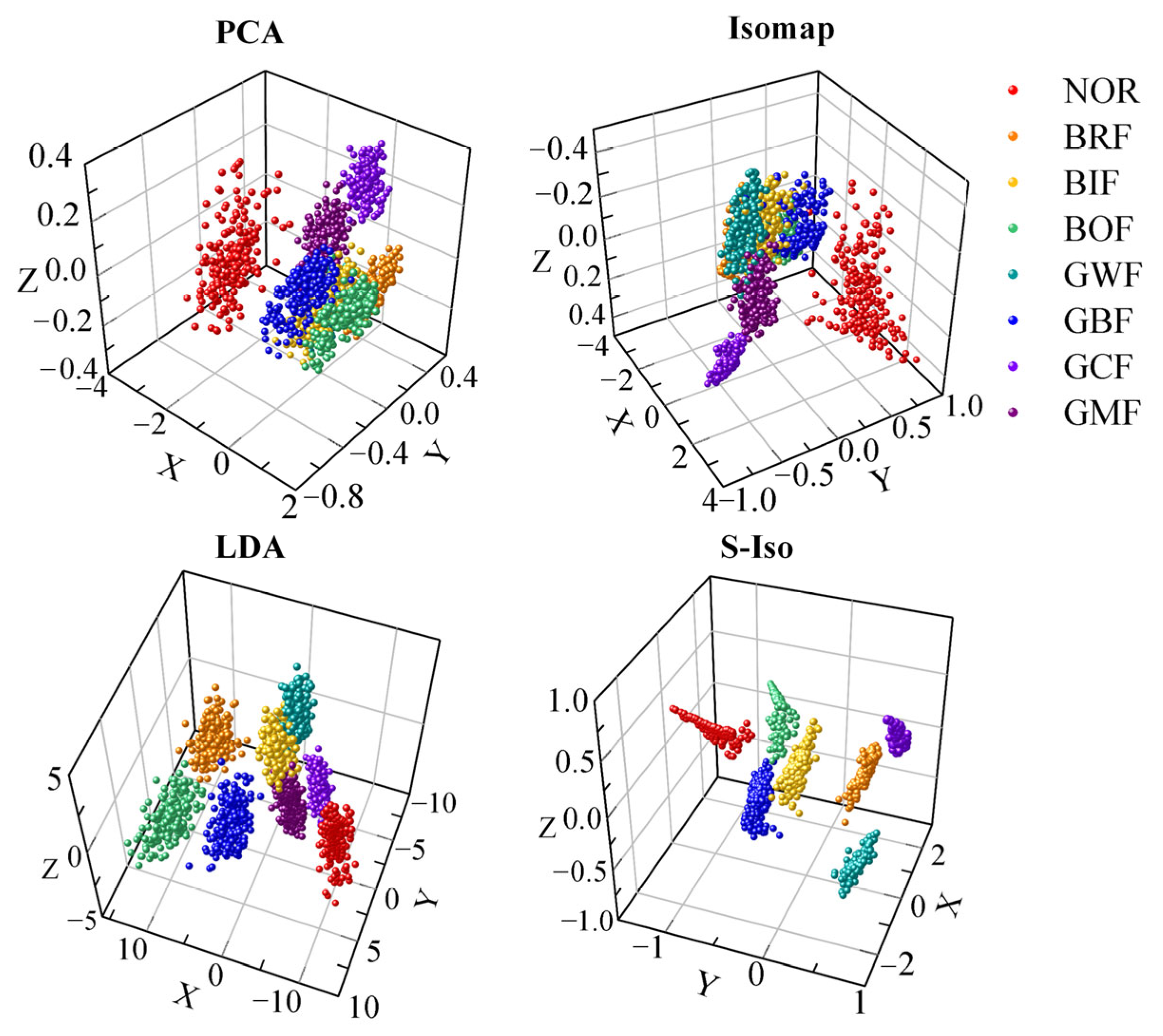
4.3. Fault Feature Dimensionality Reduction
4.4. Fault State Identification
5. Conclusions
- 35.
- The RCMFDE is suitable for extracting fault features of gearboxes. The average recognition rate of the RCMFDE feature set (i.e., 94.72%) is 0.76% and 6.59%, higher than that of the MFDE and MPE, respectively.
- 36.
- The S-Iso’s visualization effect and performance index are better than the PCA, LDA, and Isomap. Moreover, the averaged recognition rate of the S-Iso reaches 100%, which is 4.51%, 2.92%, and 4.17% higher than that of the PCA, LDA, and Isomap.
- 37.
- The suggested fault diagnosis scheme for planetary gearboxes can accurately identify eight states of planetary gearboxes with 100% recognition accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lei, Y.G.; Lin, J.; Zuo, M.J.; He, Z.J. Condition monitoring and fault diagnosis of planetary gearboxes: A review. Measurement 2014, 48, 292–305. [Google Scholar] [CrossRef]
- Cai, Y.X.; Wang, Z.Y.; Yao, L.G.; Lin, T.X.; Zhang, J. Ensemble dilated convolutional neural network and its application in rotating machinery fault diagnosis. Comput. Intell. Neurosci. 2022, 2022, 6316140. [Google Scholar] [CrossRef] [PubMed]
- Feng, Z.P.; Zuo, M.J. Vibration signal models for fault diagnosis of planetary gearboxes. J. Sound Vib. 2012, 331, 4919–4939. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Wang, J.; Wang, Y.R.; He, Z.J. An intelligent diagnosis scheme based on generative adversarial learning deep neural networks and its application to planetary gearbox fault pattern recognition. Neurocomputing 2018, 310, 213–222. [Google Scholar] [CrossRef]
- Wang, X.L.; Zheng, J.D.; Pan, H.Y.; Liu, Q.Y.; Wang, C.J. Maximum envelope-based autogram and symplectic geometry mode decomposition based gear fault diagnosis method. Measurement 2021, 174, 108575. [Google Scholar] [CrossRef]
- Lei, Y.G.; Han, D.; Lin, J.; He, Z.J. Planetary gearbox fault diagnosis using an adaptive stochastic resonance method. Mech. Syst. Signal Process. 2013, 38, 113–124. [Google Scholar] [CrossRef]
- Wang, X.L.; Zheng, J.D.; Ni, Q.; Pan, H.Y.; Zhang, J. Traversal index enhanced-gram (TIEgram): A novel optimal demodulation frequency band selection method for rolling bearing fault diagnosis under non-stationary operating conditions. Mech. Syst. Signal Process. 2022, 172, 109017. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Yao, L.G.; Cai, Y.W.; Zhang, J. Mahalanobis semi-supervised mapping and beetle antennae search based support vector machine for wind turbine rolling bearings fault diagnosis. Renew. Energy 2020, 155, 1312–1327. [Google Scholar] [CrossRef]
- Wu, C.Z.; Jiang, P.C.; Ding, C.; Feng, F.Z.; Chen, T. Intelligent fault diagnosis of rotating machinery based on one-dimensional convolutional neural network. Comput. Ind. 2019, 108, 53–61. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Yao, L.G.; Cai, Y.W. Rolling bearing fault diagnosis using generalized refined composite multiscale sample entropy and optimized support vector machine. Measurement 2020, 156, 107574. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Chen, H.; Yao, L.G.; Chen, X.; Qi, L.N.; Zhang, J. An effective multi-channel fault diagnosis approach for rotating machinery based on multivariate generalized refined composite multi-scale sample entropy. Nonlinear Dyn. 2021, 106, 2107–2130. [Google Scholar] [CrossRef]
- Zheng, J.D.; Pan, H.Y.; Cheng, J.S. Rolling bearing fault detection and diagnosis based on composite multiscale fuzzy entropy and ensemble support vector machines. Mech. Syst. Signal Process. 2017, 85, 746–759. [Google Scholar] [CrossRef]
- Ye, Y.G.; Pan, H.Y.; Zhang, Y.X.; Wang, Q.B.; Wang, Z.W.; Teng, Z.J.; Zhang, H.G. Fault diagnosis of high-speed train suspension systems using multiscale permutation entropy and linear local tangent space alignment. Mech. Syst. Signal Process. 2020, 138, 106565. [Google Scholar] [CrossRef]
- Zhou, F.M.; Yang, X.Q.; Shen, J.X.; Liu, W.Q. Fault diagnosis of hydraulic pumps using PSO-VMD and refined composite multi-scale fluctuation dispersion entropy. Shock. Vib. 2020, 2020, 13. [Google Scholar]
- Zheng, J.D.; Pan, H.Y.; Tong, J.Y.; Liu, Q.Y. Generalized refined composite multiscale fuzzy entropy and multi-cluster feature selection based intelligent fault diagnosis of rolling bearing. ISA Trans. 2022, 123, 136–151. [Google Scholar] [CrossRef]
- Yan, X.A.; Jia, M.P. Intelligent fault diagnosis of rotating machinery using improved multiscale dispersion entropy and mRMR feature selection. Knowl. Based Syst. 2019, 163, 450–471. [Google Scholar] [CrossRef]
- Hamed, A.; Steven, E.A.; Saeid, S.; Chang, Z.Q.; Guillermo, S.; Javier, E.; Anoopum, S.G. Multiscale fluctuation-based dispersion entropy and its applications to neurological diseases. IEEE Access 2019, 7, 68718–68733. [Google Scholar]
- Yu, X.; Dong, F.; Ding, E.F.; Wu, S.P.; Fan, C.Y.; Javier, E.; Anoopum, S.G. Rolling bearing fault diagnosis using modified LFDA and EMD with sensitive feature selection. IEEE Access 2018, 6, 3715–3730. [Google Scholar] [CrossRef]
- Zhang, M.; Li, X.J.; Xu, S.H.; Meng, X.Y. Fault pattern recognition of rolling bearing based on smoothness prior approach and dual-input depth spatial–temporal fusion. Meas. Sci. Technol. 2022, 33, 085022. [Google Scholar] [CrossRef]
- Zhao, H.M.; Zheng, J.J.; Xu, J.J.; Wu, D. Fault diagnosis method based on principal component analysis and broad learning system. IEEE Access 2019, 7, 99263–99272. [Google Scholar] [CrossRef]
- Wen, J.; Xiao, Z.F.; Cui, J.R.; Fei, L.K.; Yan, K.; Chen, L.; Xu, Y. Robust sparse linear discriminant analysis. IEEE Trans. Circuits Syst. Video Technol. 2019, 29, 390–403. [Google Scholar] [CrossRef]
- Shao, R.P.; Hu, W.T.; Wang, Y.Y.; Qi, X.K. The fault feature extraction and classification of gear using principal component analysis and kernel principal component analysis based on the wavelet packet transform. Measurement 2014, 54, 118–132. [Google Scholar] [CrossRef]
- Van, M.; Kang, H.J. Wavelet kernel local fisher discriminant analysis with particle swarm optimization algorithm for bearing defect classification. IEEE Trans. Instrum. Meas. 2015, 64, 3588–3600. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Li, G.S.; Yao, L.G.; Qi, X.L.; Zhang, L. Data-driven fault diagnosis for wind turbines using modified multi-scale fluctuation dispersion entropy and cosine pairwise-constrained supervised manifold mapping. Knowl. Based Syst. 2021, 228, 107276. [Google Scholar] [CrossRef]
- Farzana, A.; Samira, S.; Bassant, S. Conceptual and empirical comparison of dimensionality reduction algorithms (PCA, KPCA, LDA, MDS, SVD, LLE, ISOMAP, LE, ICA, t-SNE). Comput. Sci. Rev. 2021, 40, 100378. [Google Scholar]
- He, Z.Y.; Shao, H.D.; Ding, Z.Y.; Jiang, H.K.; Cheng, J.S. Modified deep autoencoder driven by multisource parameters for fault transfer prognosis of aeroengine. IEEE Trans. Ind. Electron. 2022, 69, 845–855. [Google Scholar] [CrossRef]
- Huang, Y.X.; Zha, X.F.; Lee, J.; Jiang, H.K.; Liu, C.L. Discriminant diffusion maps analysis: A robust manifold learner for dimensionality reduction and its applications in machine condition monitoring and fault diagnosis. Mech. Syst. Signal Process. 2013, 34, 277–297. [Google Scholar] [CrossRef]
- Geng, X.; Zhan, D.C.; Zhou, Z.H. Supervised nonlinear dimensionality reduction for visualization and classification. IEEE Trans. Syst. Man Cybern. Part B 2005, 35, 1098–1107. [Google Scholar] [CrossRef] [Green Version]
- Afshin, F.; Mohammad, H.; Seyedali, M.; Gandomi, A.H. Marine predators algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar]
- Chen, X.; Qi, X.L.; Wang, Z.Y.; Cui, C.C.; Wu, B.L.; Yang, Y. Fault diagnosis of rolling bearing using marine predators algorithm-based support vector machine and topology learning and out-of-sample embedding. Expert Meas. 2021, 176, 109116. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Yao, L.G.; Chen, G.; Ding, J.X. Modified multiscale weighted permutation entropy and optimized support vector machine method for rolling bearing fault diagnosis with complex signals. ISA Trans. 2021, 114, 470–484. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise | N = 1000 | N = 2000 | N = 3000 | N = 4000 |
|---|---|---|---|---|
| White noise | 2.71 s | 4.58 s | 6.45 s | 8.21 s |
| Blue noise | 2.75 s | 4.55 s | 6.41 s | 8.31 s |
| Component | Number of Gear Teeth | |
|---|---|---|
| First Stage | Second Stage | |
| Gear ring | 100 | 100 |
| Planet gear | 40 (Number of planet gears is 3) | 36 (Number of planet gears is 4) |
| Sun gear | 20 | 28 |
| Fault State | Abbreviation | Label |
|---|---|---|
| Normal | NOR | 1 |
| Bearing with rolling roller failure | BRF | 2 |
| Bearing with inner ring failure | BIF | 3 |
| Bearing with outer ring failure | BOF | 4 |
| Sun gear with wear failure | GWF | 5 |
| Sun gear with broken tooth failure | GBF | 6 |
| Sun gear with crack failure | GCF | 7 |
| Sun gear with missing tooth failure | GMF | 8 |
| Method | Parameter Setting |
|---|---|
| PCA | Dimensionality is 5 |
| LDA | Dimensionality is 5 |
| Isomap | Dimensionality is 5; Nearest neighbor parameter is 38 |
| S-Iso | Dimensionality is 5; Nearest neighbor parameter is 53; and Weighting parameter is 0.4 |
| Method | Inter-Class Spacing | Intra-Class Spacing | Inter-Class Spacing/ Intra-Class Spacing |
|---|---|---|---|
| PCA | 0.70 | 0.14 | 5.00 |
| LDA | 58.82 | 4.97 | 11.84 |
| Isomap | 0.99 | 0.18 | 5.50 |
| S-Iso | 1.40 | 0.11 | 12.73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, H.; Wang, Z.; Cai, Y.; Ding, J.; Wang, X.; Yao, L. Refined Composite Multiscale Fluctuation Dispersion Entropy and Supervised Manifold Mapping for Planetary Gearbox Fault Diagnosis. Machines 2023, 11, 47. https://doi.org/10.3390/machines11010047
Su H, Wang Z, Cai Y, Ding J, Wang X, Yao L. Refined Composite Multiscale Fluctuation Dispersion Entropy and Supervised Manifold Mapping for Planetary Gearbox Fault Diagnosis. Machines. 2023; 11(1):47. https://doi.org/10.3390/machines11010047
Chicago/Turabian StyleSu, Haocheng, Zhenya Wang, Yuxiang Cai, Jiaxin Ding, Xinglong Wang, and Ligang Yao. 2023. "Refined Composite Multiscale Fluctuation Dispersion Entropy and Supervised Manifold Mapping for Planetary Gearbox Fault Diagnosis" Machines 11, no. 1: 47. https://doi.org/10.3390/machines11010047