
Loco-Manipulation Control for Arm-Mounted Quadruped Robots: Dynamic and Kinematic Strategies



Abstract
:1. Introduction
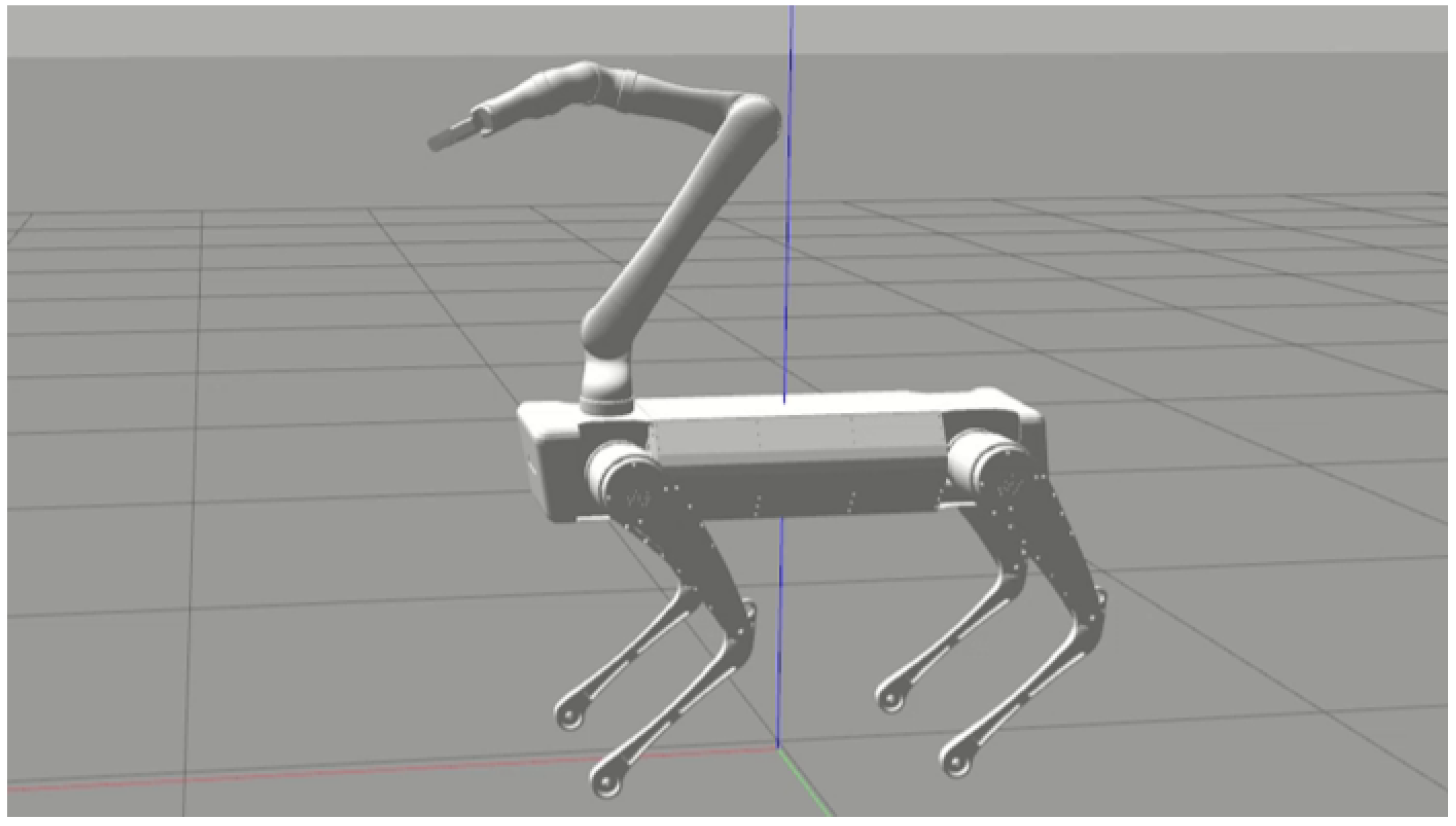
2. Model Formulation
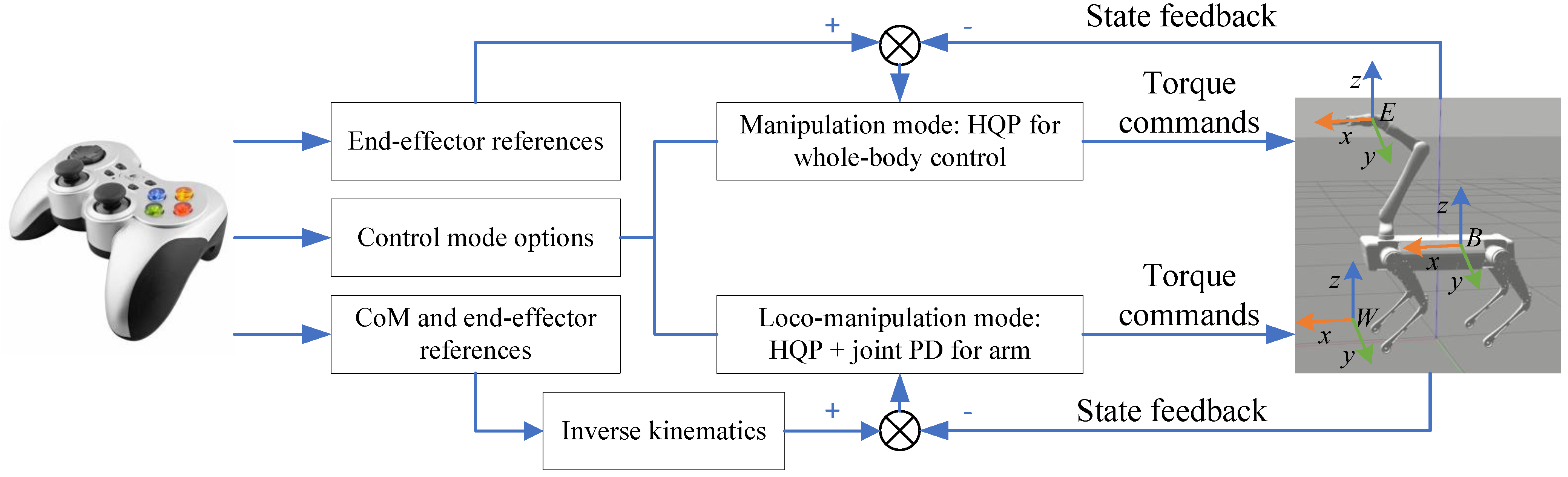
3. Materials and Methods
3.1. Manipulation Mode
3.2. Loco-Manipulation Mode
3.3. Simulation Platforms
4. Results
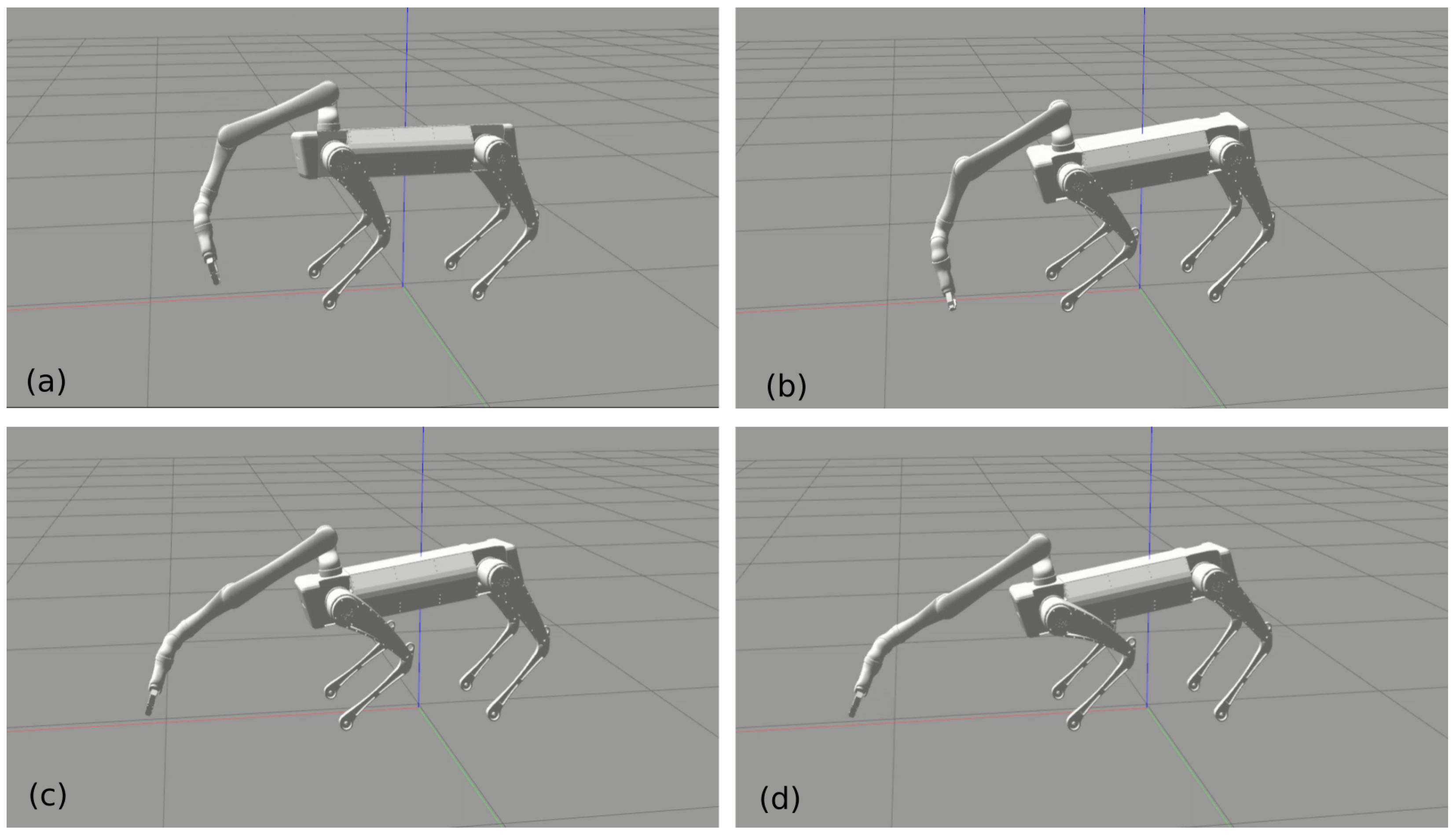
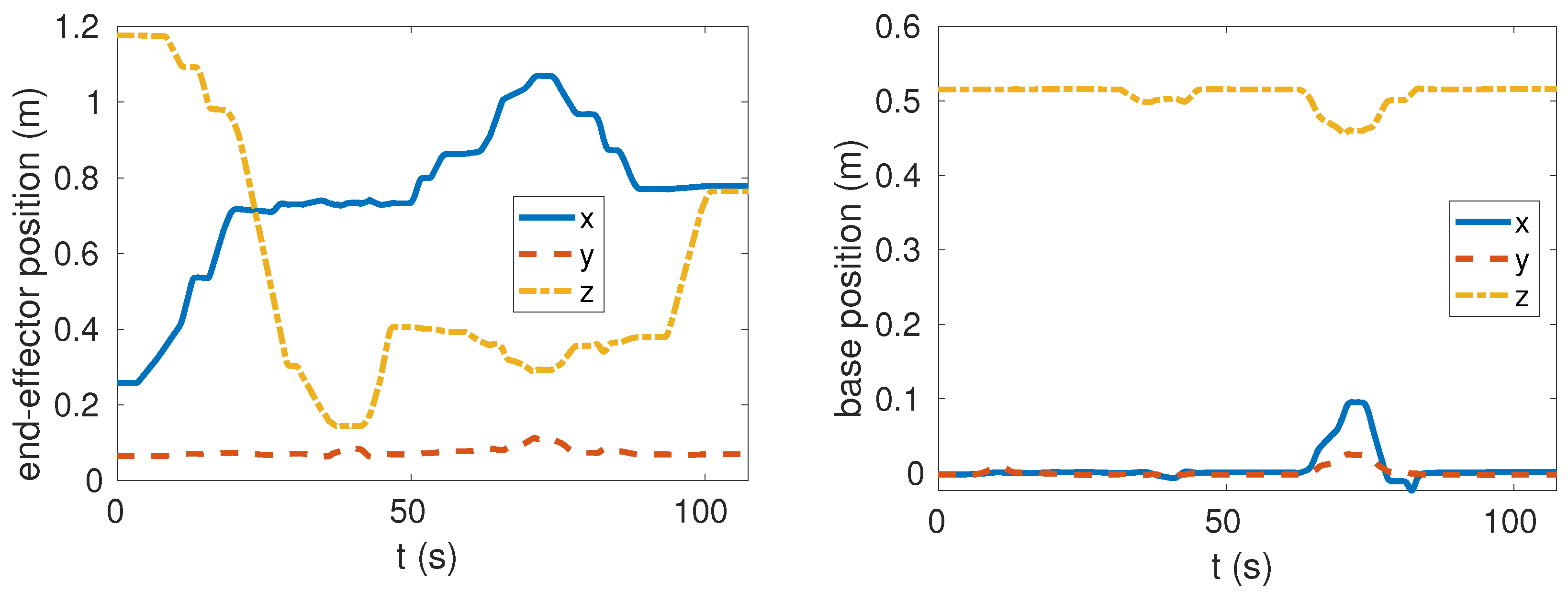
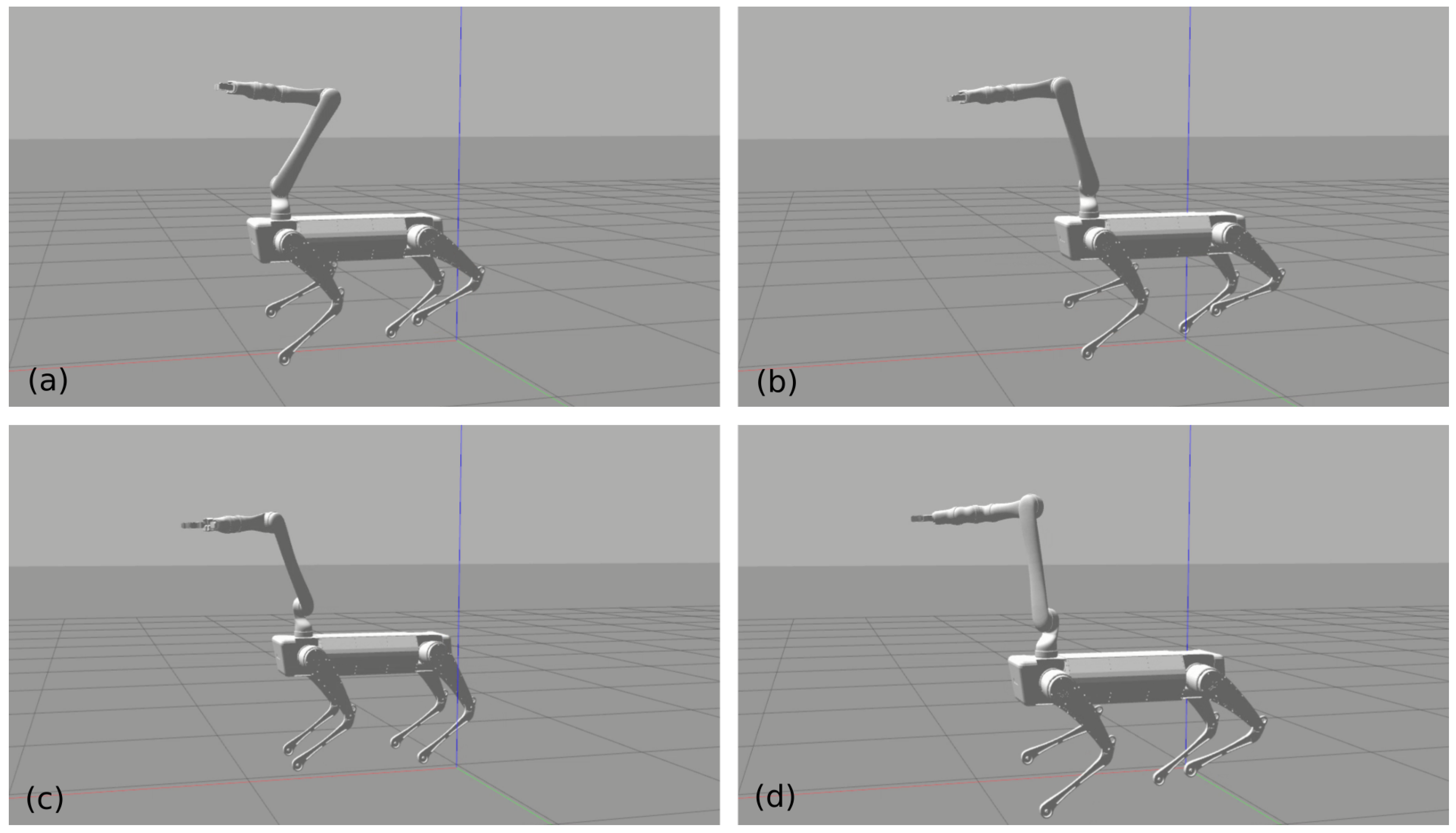
4.1. Torso Pose Adaptation in Manipulation Mode
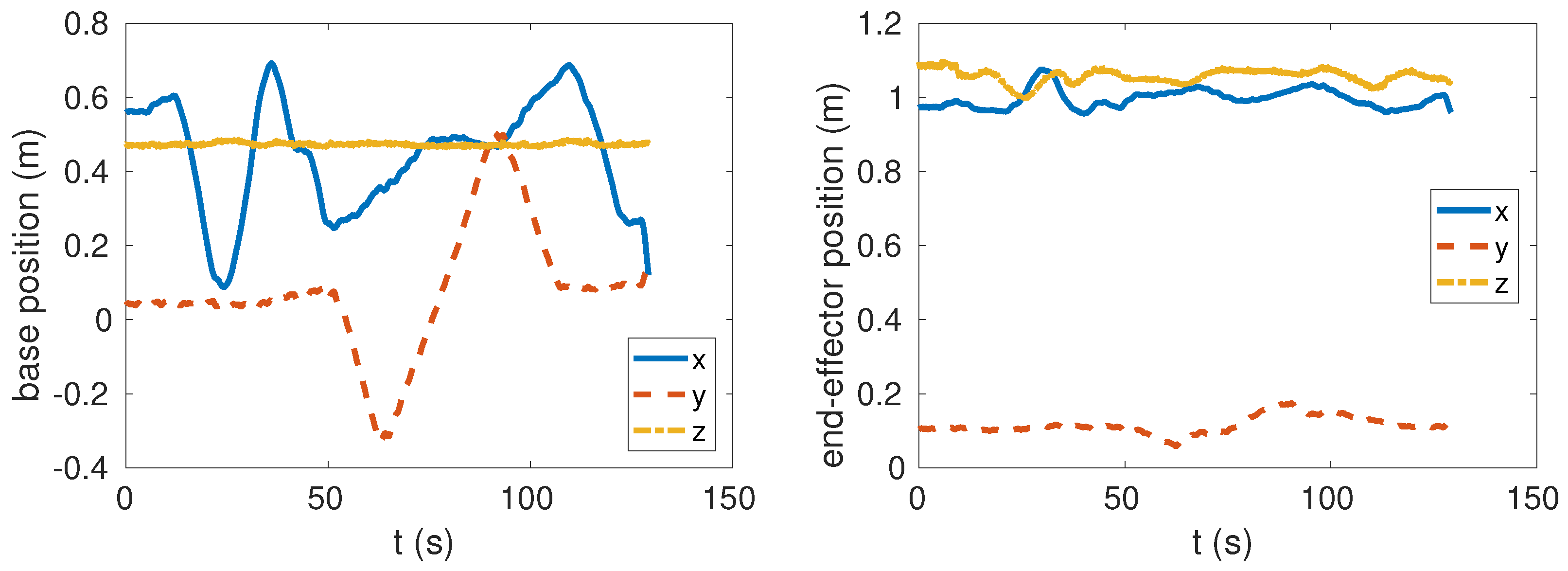
4.2. Keeping the End-Effector Fixed in Loco-Manipulation Mode
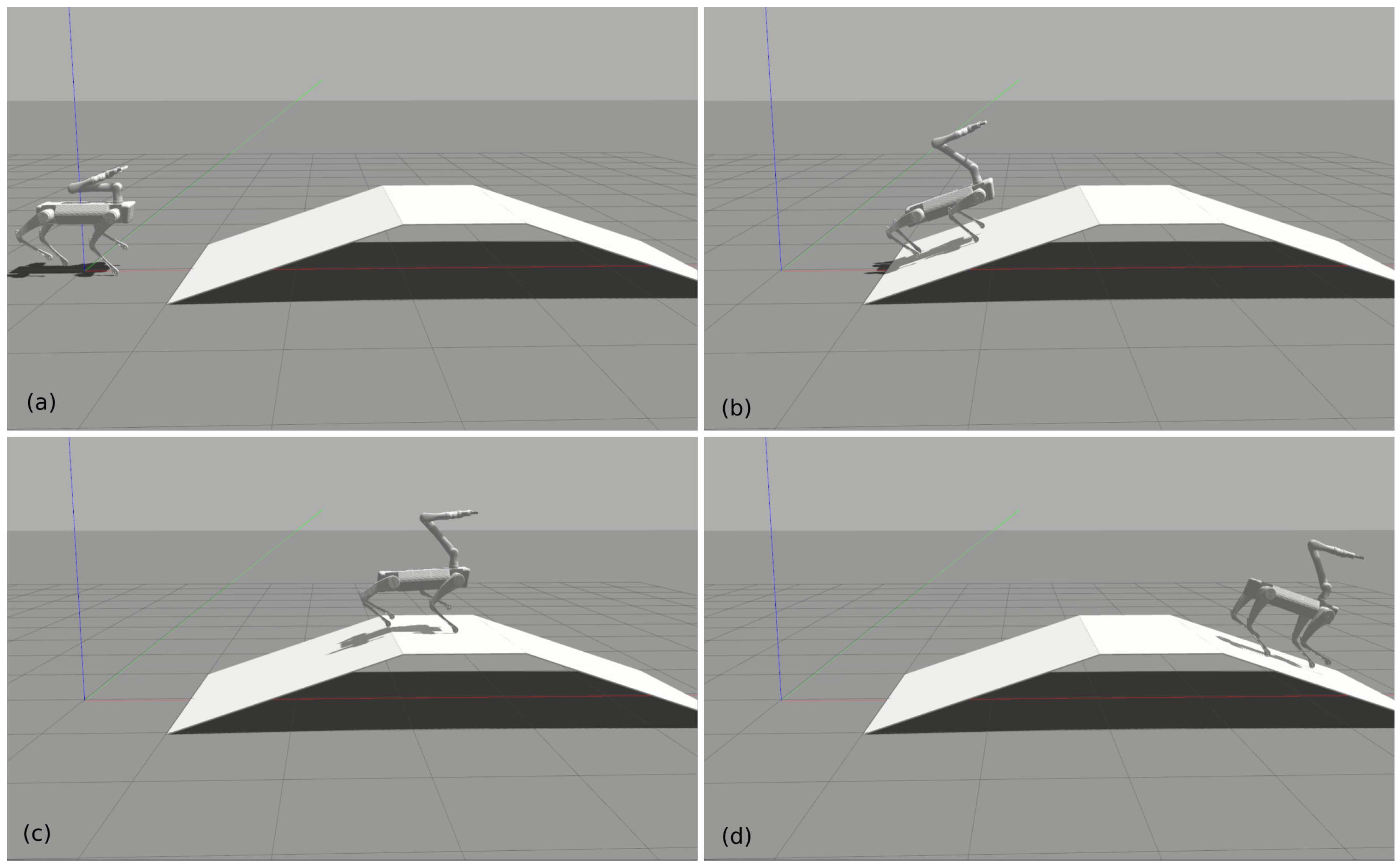
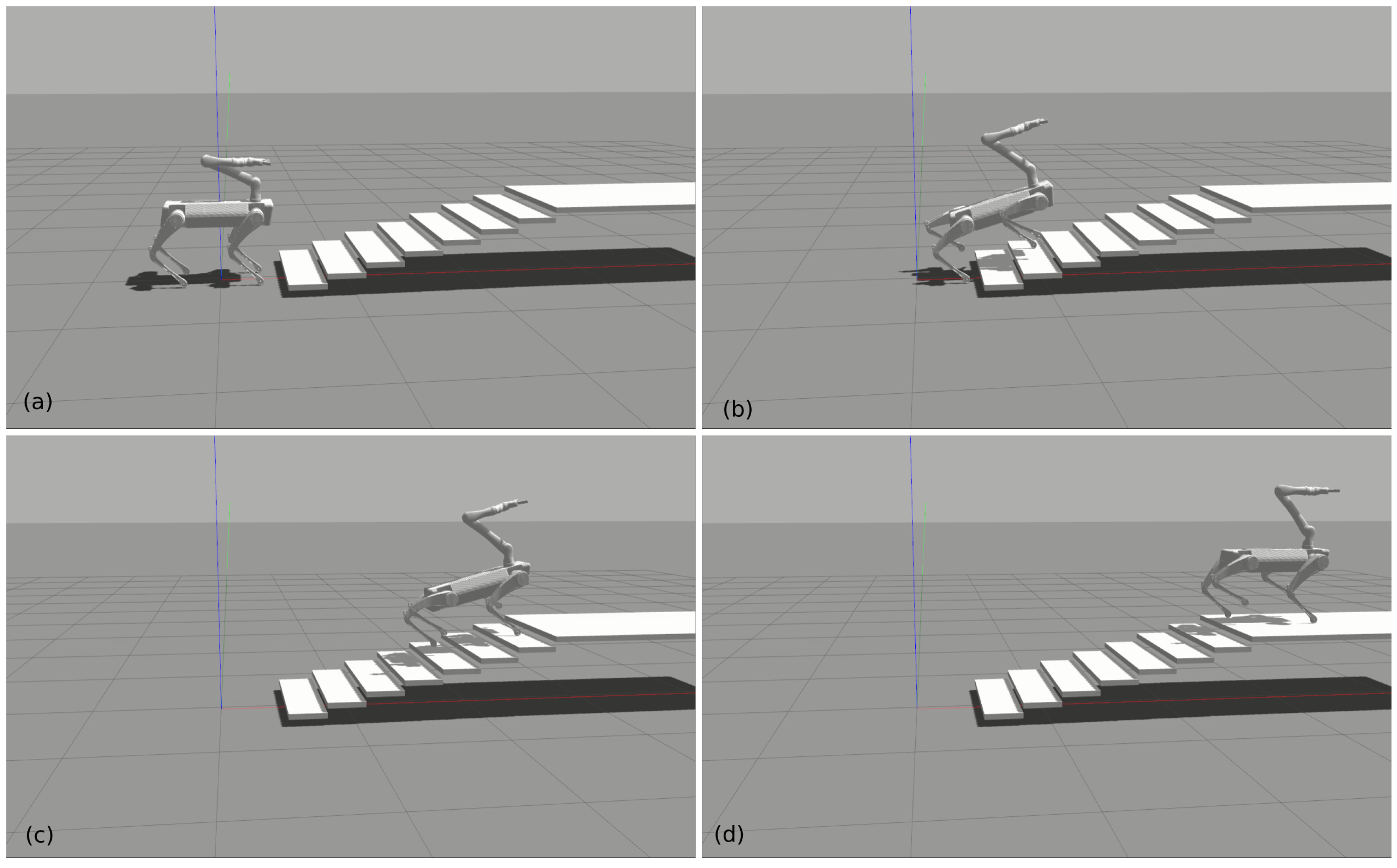
4.3. Locomotion Demonstrations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PD | Proportional derivative |
| DoF | Degree of freedom |
| WBC | Whole-body controller |
| QP | Quadratic programming |
| WQP | Weighted quadratic programming |
| HQP | Hierarchical quadratic programming |
| CoM | Center of mass |
| MPC | Model predictive control |
| LIP | Linear inverted pendulum |
| ROS | Robot operation system |
| IMU | Inertia measurement unit |
| CPU | Central processing unit |
References
- Atkeson, C.G.; Babu, B.P.W.; Banerjee, N.; Berenson, D.; Bove, C.P.; Cui, X.; DeDonato, M.; Du, R.; Feng, S.; Franklin, P.; et al. No falls, no resets: Reliable humanoid behavior in the DARPA robotics challenge. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015; pp. 623–630. [Google Scholar]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Koolen, T.; Marion, P.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Auton. Robot. 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Yang, Y.; Merkt, W.; Ferrolho, H.; Ivan, V.; Vijayakumar, S. Efficient humanoid motion planning on uneven terrain using paired forward-inverse dynamic reachability maps. IEEE Robot. Autom. Lett. 2017, 2, 2279–2286. [Google Scholar] [CrossRef]
- Henze, B.; Roa, M.A.; Ott, C. Passivity-based whole-body balancing for torque-controlled humanoid robots in multi-contact scenarios. Int. J. Robot. Res. 2016, 35, 1522–1543. [Google Scholar] [CrossRef]
- Whitman, J.; Su, S.; Coros, S.; Ansari, A.; Choset, H. Generating gaits for simultaneous locomotion and manipulation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, UK, 24–28 September 2017; pp. 2723–2729. [Google Scholar]
- Roennau, A.; Heppner, G.; Nowicki, M.; Dillmann, R. LAURON V: A versatile six-legged walking robot with advanced maneuverability. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France, 8–11 July 2014; pp. 82–87. [Google Scholar]
- Xin, G.; Smith, J.; Rytz, D.; Wolfslag, W.; Lin, H.C.; Mistry, M. Bounded haptic teleoperation of a quadruped robot’s foot posture for sensing and manipulation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May –31 August 2020; pp. 1431–1437. [Google Scholar]
- Boston Dynamics. Introducing SpotMini. 2016. Available online: https://www.youtube.com/watch?v=tf7IEVTDjng&t=59s (accessed on 1 January 2020).
- Zimmermann, S.; Poranne, R.; Coros, S. Go Fetch!-Dynamic grasps using Boston Dynamics Spot with external robotic arm. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 4488–4494. [Google Scholar]
- Abe, Y.; Stephens, B.; Murphy, M.P.; Rizzi, A.A. Dynamic whole-body robotic manipulation. In Unmanned Systems Technology XV; Karlsen, R.E., Gage, D.W., Shoemaker, C.M., Gerhart, G.R., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2013; Volume 8741, pp. 280–290. [Google Scholar]
- Rehman, B.U.; Focchi, M.; Lee, J.; Dallali, H.; Caldwell, D.G.; Semini, C. Towards a multi-legged mobile manipulator. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3618–3624. [Google Scholar]
- Peers, C.; Motawei, M.; Richardson, R.; Zhou, C. Development of a Teleoperative Quadrupedal Manipulator. In Proceedings of the UK-RAS21 Conference: “Robotics at Home” Proceedings, Leeds, UK, 2 June 2021. [Google Scholar]
- Kim, D.; Di Carlo, J.; Katz, B.; Bledt, G.; Kim, S. Highly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control. arXiv 2019, arXiv:1909.06586. [Google Scholar]
- Xin, S.; Orsolino, R.; Tsagarakis, N.G. Online Relative Footstep Optimization for Legged Robots Dynamic Walking Using Discrete-Time Model Predictive Control. In Proceedings of the IROS, Macao, China, 4–8 November 2019; pp. 513–520. [Google Scholar]
- Feng, S.; Whitman, E.; Xinjilefu, X.; Atkeson, C.G. Optimization based full body control for the atlas robot. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 120–127. [Google Scholar] [CrossRef]
- Di Carlo, J.; Wensing, P.M.; Katz, B.; Bledt, G.; Kim, S. Dynamic locomotion in the mit cheetah 3 through convex model-predictive control. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- De Lasa, M.; Mordatch, I.; Hertzmann, A. Feature-based locomotion controllers. ACM Trans. Graph. (TOG) 2010, 29, 131. [Google Scholar] [CrossRef]
- Herzog, A.; Rotella, N.; Mason, S.; Grimminger, F.; Schaal, S.; Righetti, L. Momentum control with hierarchical inverse dynamics on a torque-controlled humanoid. Auton. Robot. 2016, 40, 473–491. [Google Scholar] [CrossRef] [Green Version]
- Dario Bellicoso, C.; Gehring, C.; Hwangbo, J.; Fankhauser, P.; Hutter, M. Perception-less terrain adaptation through whole body control and hierarchical optimization. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Cancun, Mexico, 15–17 November 2016; pp. 558–564. [Google Scholar] [CrossRef] [Green Version]
- Del Prete, A.; Nori, F.; Metta, G.; Natale, L. Prioritized motion–force control of constrained fully-actuated robots: “Task Space Inverse Dynamics”. Robot. Auton. Syst. 2015, 63, 150–157. [Google Scholar] [CrossRef] [Green Version]
- Bellicoso, C.D.; Kramer, K.; Stäuble, M.; Sako, D.; Jenelten, F.; Bjelonic, F.; Hutter, M. ALMA-Articulated Locomotion and Manipulation for a Torque-Controllable Robot. In Proceedings of the International Conference on Robotics and Automation (ICRA 2019), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Carpentier, J.; Valenza, F.; Mansard, N. Pinocchio: Fast forward and Inverse Dynamics for Poly-Articulated Systems. 2015–2019. Available online: https://stack-of-tasks.github.io/pinocchio (accessed on 1 January 2020).
- Carpentier, J.; Saurel, G.; Buondonno, G.; Mirabel, J.; Lamiraux, F.; Stasse, O.; Mansard, N. The Pinocchio C++ library–A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives. In Proceedings of the IEEE International Symposium on System Integrations (SII), Paris, France, 14–16 January 2019. [Google Scholar]
- Orin, D.E.; Goswami, A. Centroidal Momentum Matrix of a humanoid robot: Structure and properties. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 653–659. [Google Scholar] [CrossRef] [Green Version]
- Wensing, P.M.; Orin, D.E. Improved computation of the humanoid centroidal dynamics and application for whole-body control. Int. J. Humanoid Robot. 2016, 13, 1550039. [Google Scholar] [CrossRef] [Green Version]
- Xin, G.; Wolfslag, W.; Lin, H.C.; Tiseo, C.; Mistry, M. An optimization-based locomotion controller for quadruped robots leveraging Cartesian impedance control. Front. Robot. AI 2020, 7, 48. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xin, G.; Xin, S.; Cebe, O.; Pollayil, M.J.; Angelini, F.; Garabini, M.; Vijayakumar, S.; Mistry, M. Robust Footstep Planning and LQR Control for Dynamic Quadrupedal Locomotion. IEEE Robot. Autom. Lett. 2021, 6, 4488–4495. [Google Scholar] [CrossRef]
- Stellato, B.; Banjac, G.; Goulart, P.; Bemporad, A.; Boyd, S. OSQP: An operator splitting solver for quadratic programs. Math. Program. Comput. 2020, 12, 637–672. [Google Scholar] [CrossRef] [Green Version]
- Merkt, W.; Ivan, V.; Yang, Y.; Vijayakumar, S. Towards Shared Autonomy Applications using Whole-body Control Formulations of Locomanipulation. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 1206–1211. [Google Scholar]
- Glowinski, S.; Ptak, M. A kinematic model of a humanoid lower limb exoskeleton with pneumatic actuators. Acta Bioeng. Biomech./Wroc. Univ. Technol. 2022, 24. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Priority | Task | Equation |
|---|---|---|
| 1 | floating-base dynamics | Equation (4) |
| no contact motion | Equation (3) | |
| inequality constraints | Equation (16) | |
| 2 | end-effector motion tracking | Equation (19) |
| 3 | base pose tracking | Equation (21) |
| Priority | Task | Equation |
|---|---|---|
| 1 | floating-base dynamics | Equation (4) |
| no contact motion | Equation (3) | |
| inequality constraints | Equation (16) | |
| 2 | swing foot motion tracking | Equation (22) |
| 3 | base orientation tracking | Equation (23) |
| 4 | centroidal momentum control | Equation (24) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xin, G.; Zeng, F.; Qin, K. Loco-Manipulation Control for Arm-Mounted Quadruped Robots: Dynamic and Kinematic Strategies. Machines 2022, 10, 719. https://doi.org/10.3390/machines10080719
Xin G, Zeng F, Qin K. Loco-Manipulation Control for Arm-Mounted Quadruped Robots: Dynamic and Kinematic Strategies. Machines. 2022; 10(8):719. https://doi.org/10.3390/machines10080719
Chicago/Turabian StyleXin, Guiyang, Fanlian Zeng, and Kairong Qin. 2022. "Loco-Manipulation Control for Arm-Mounted Quadruped Robots: Dynamic and Kinematic Strategies" Machines 10, no. 8: 719. https://doi.org/10.3390/machines10080719