
Research on Safety Detection of Transmission Line Disaster Prevention Based on Improved Lightweight Convolutional Neural Network


Abstract
:1. Introduction
- (1)
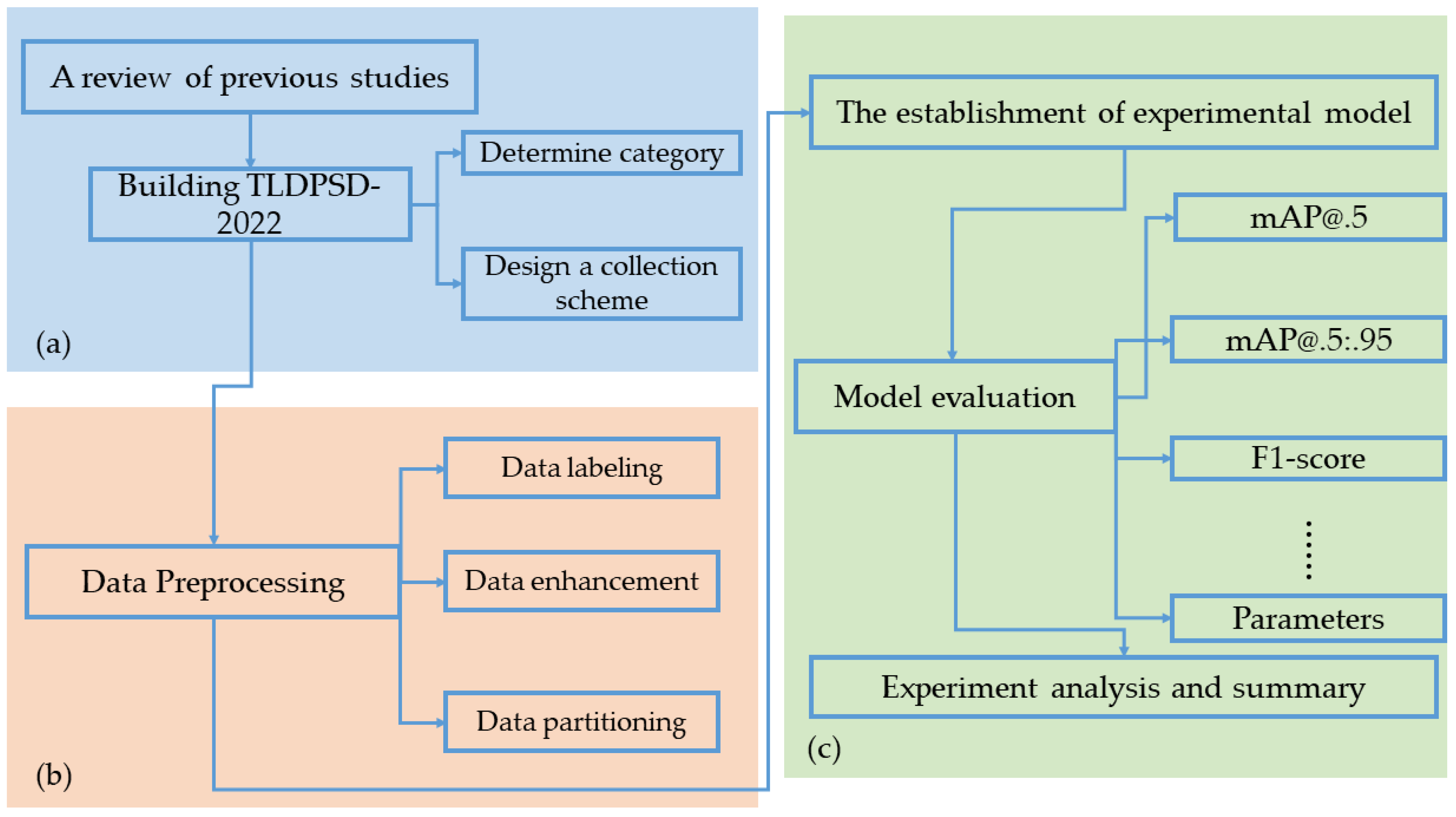
- Establish an experimental dataset for the disaster prevention and safety detection of transmission lines, aiming to fill in the current data gaps in the field of disaster prevention and safety detection of transmission lines.
- (2)
- Improve the lightweight convolutional neural network structure, aiming to improve the overall performance of the Model E model in the safety detection of transmission line disaster prevention.
- (3)
- Establish a reliable, flexible, low-cost embedded transmission line disaster prevention safety detection model.
2. Methods
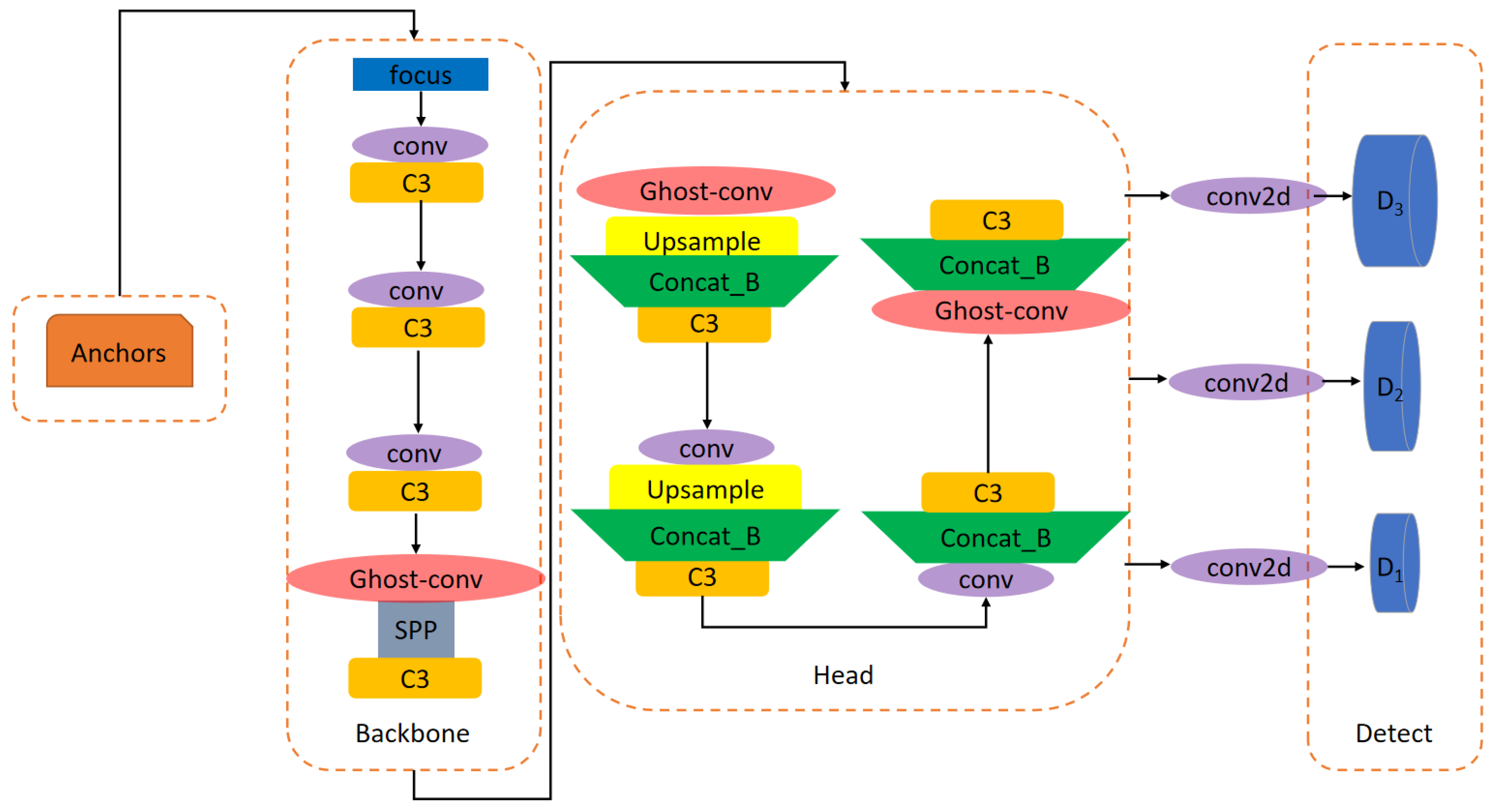
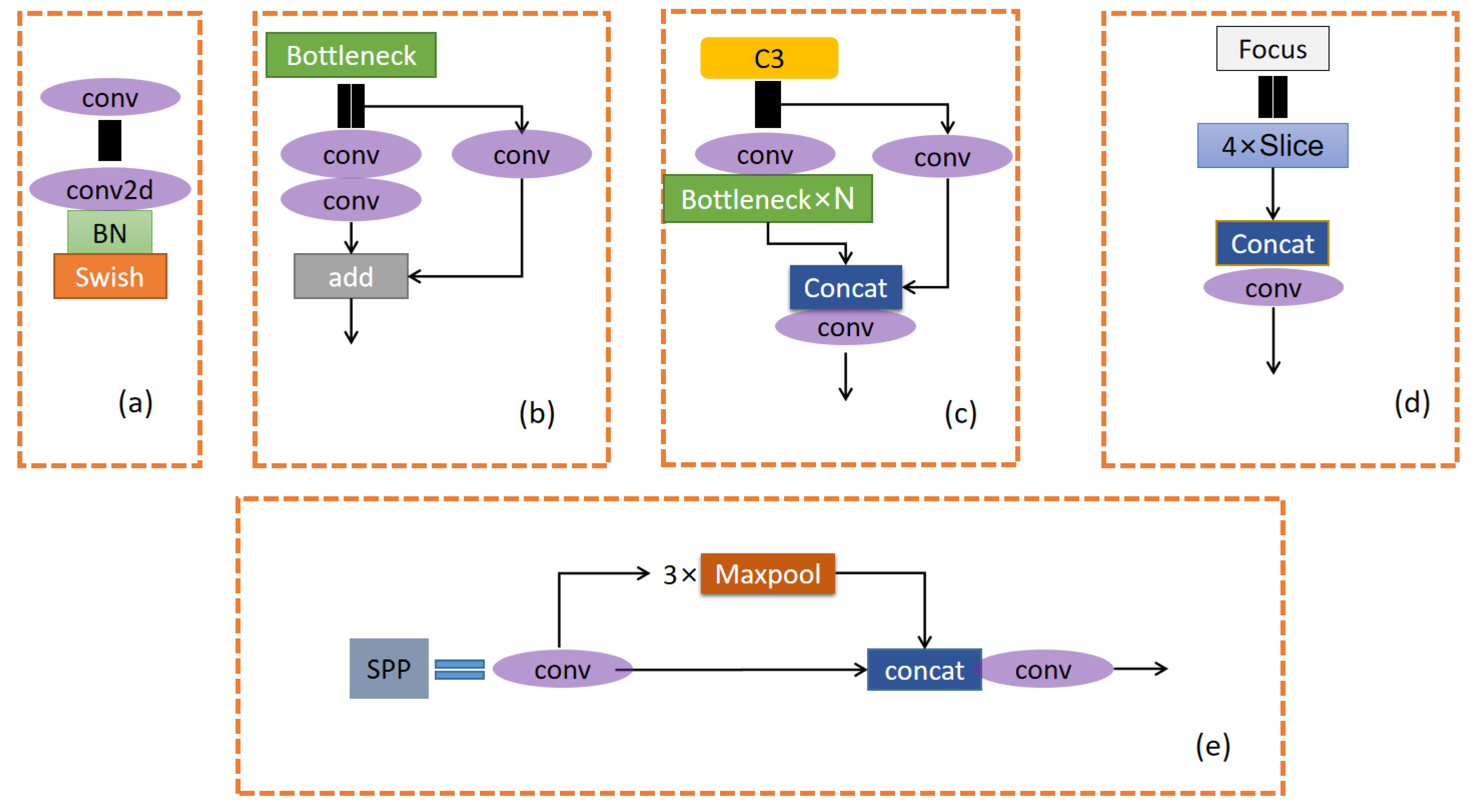
2.1. Model E Network Frame
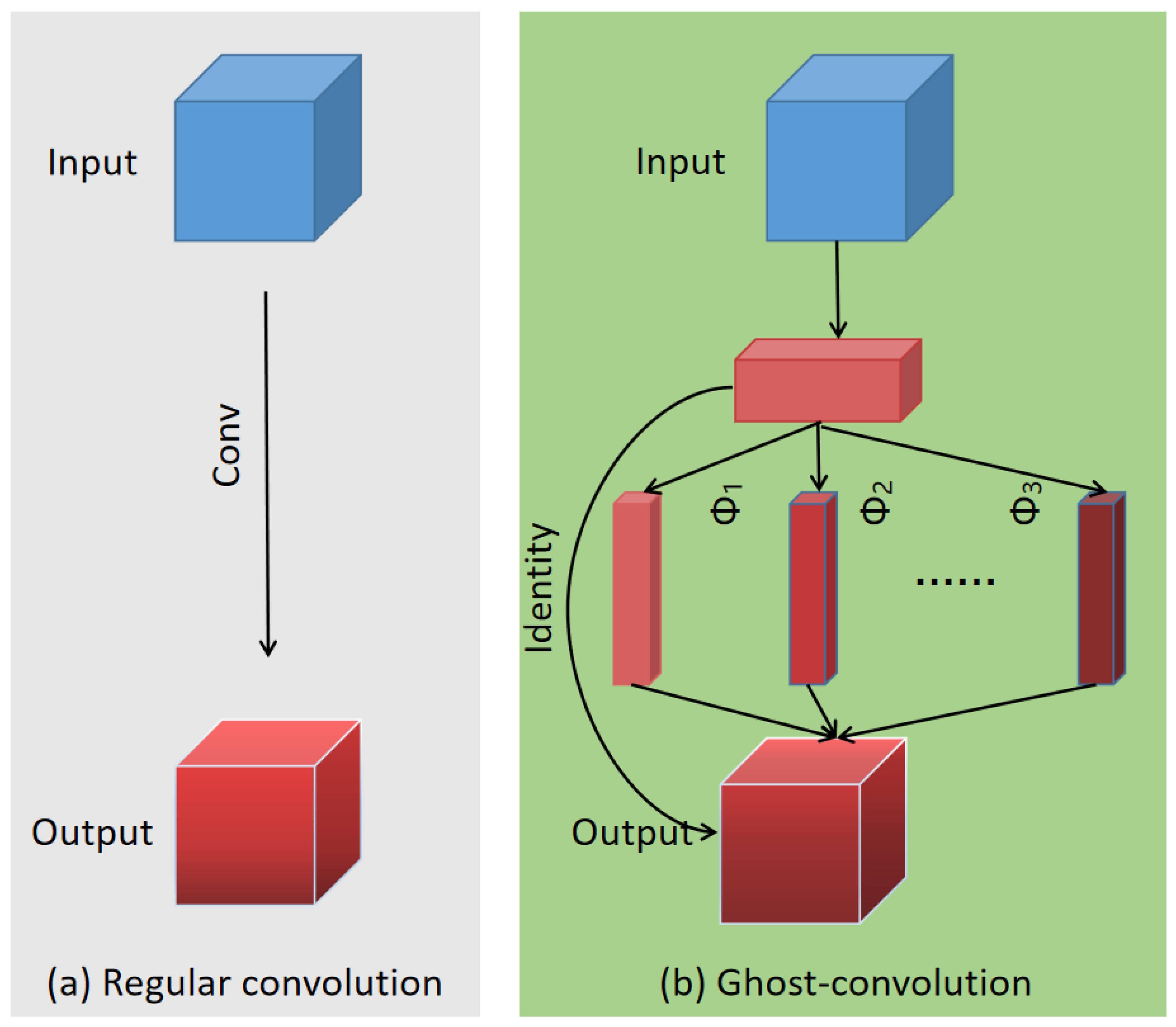
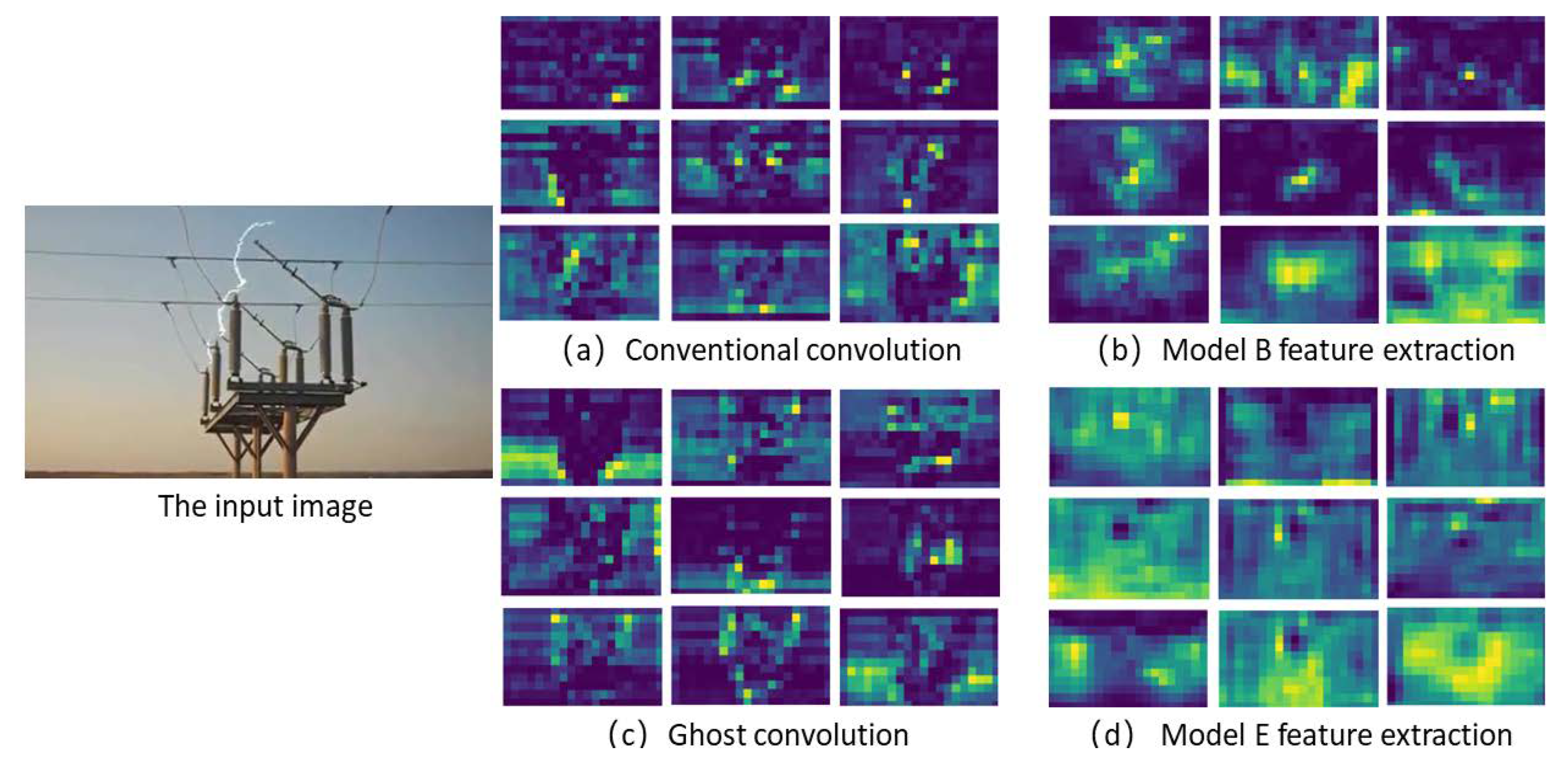
2.2. Improve Model E Backbone Network Feature Extraction Efficiency
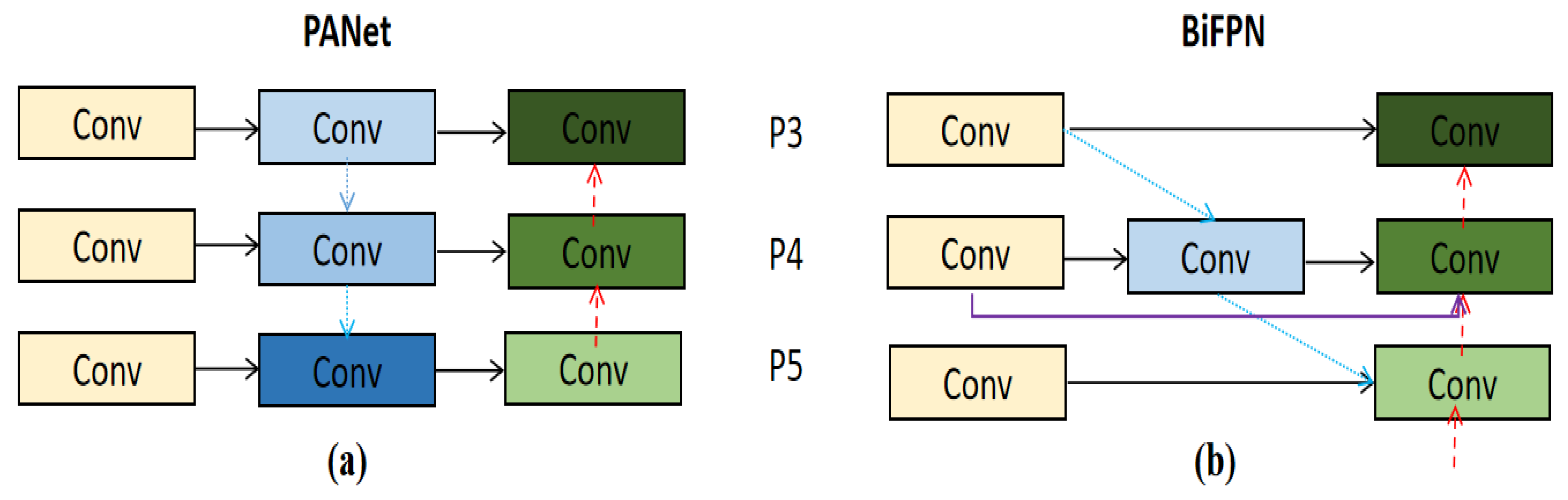
2.3. Improve the Feature Extraction Capability of the Head Network of Model E
2.4. Optimize the Sample Imbalance Handling Mechanism of Model E
3. Experiment
3.1. The Establishment of Evaluation Indicators
- (1)
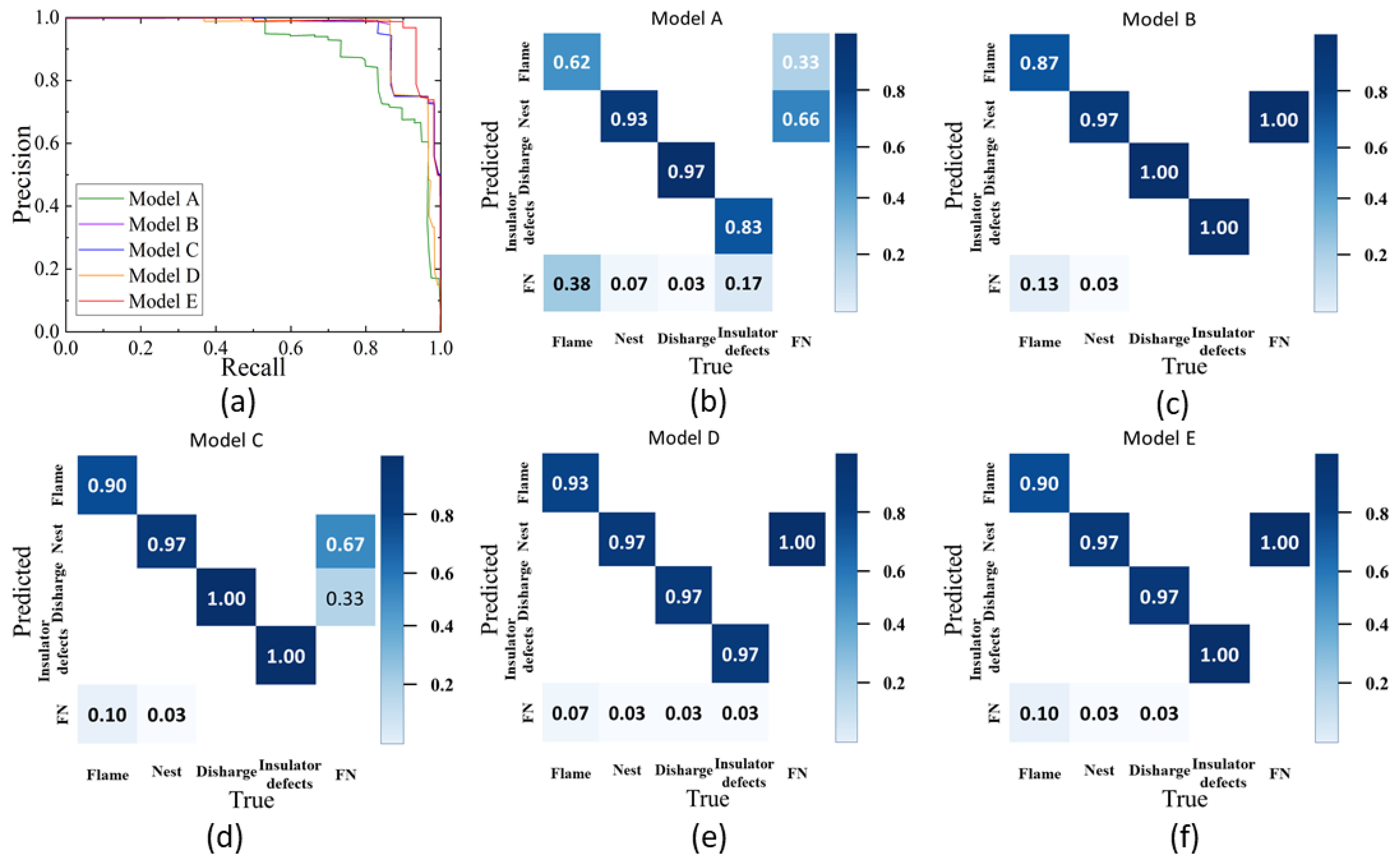
- The confusion matrix
- (2)
- Precision, Recall, F1-score, and PR curve
- (3)
- mAP@.5 (mean Average Precision IoU = 0.5), mAP@.5:.95
- (4)
- Giga Floating Point Operations Per Second (GFLOPs), Frames Per Second (FPS), and Parameters
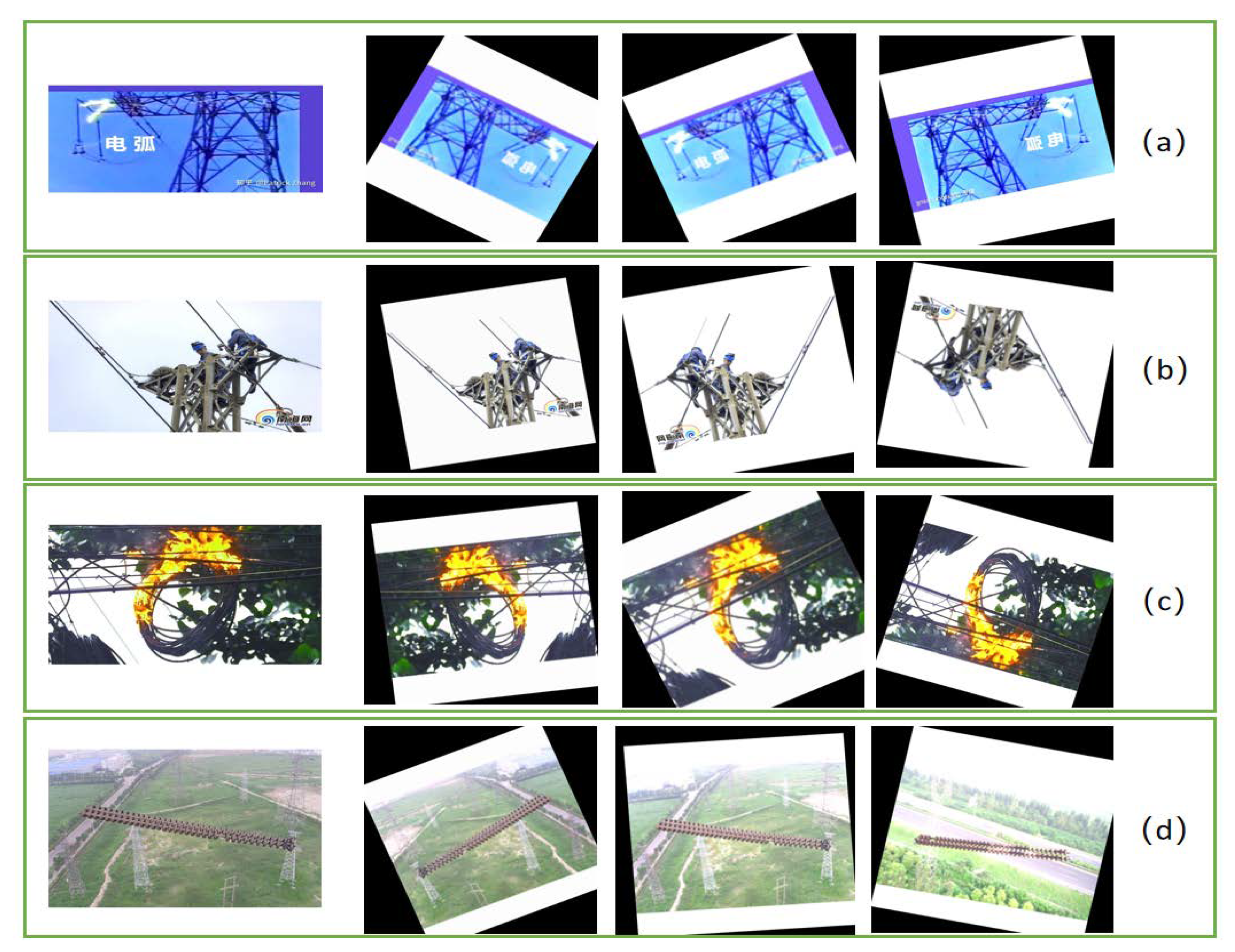
3.2. The Establishment of the Dataset
3.3. Implementation Details
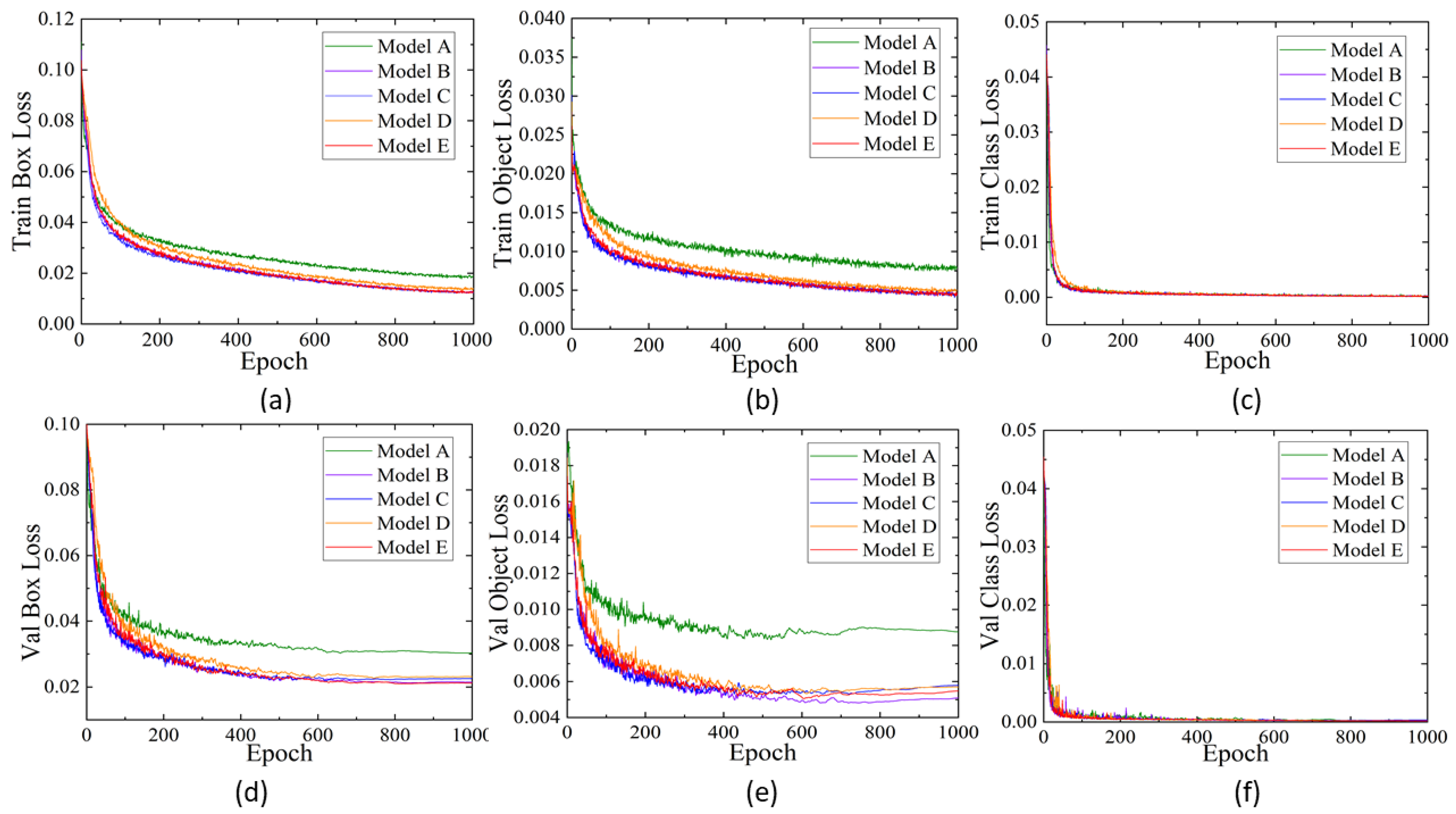
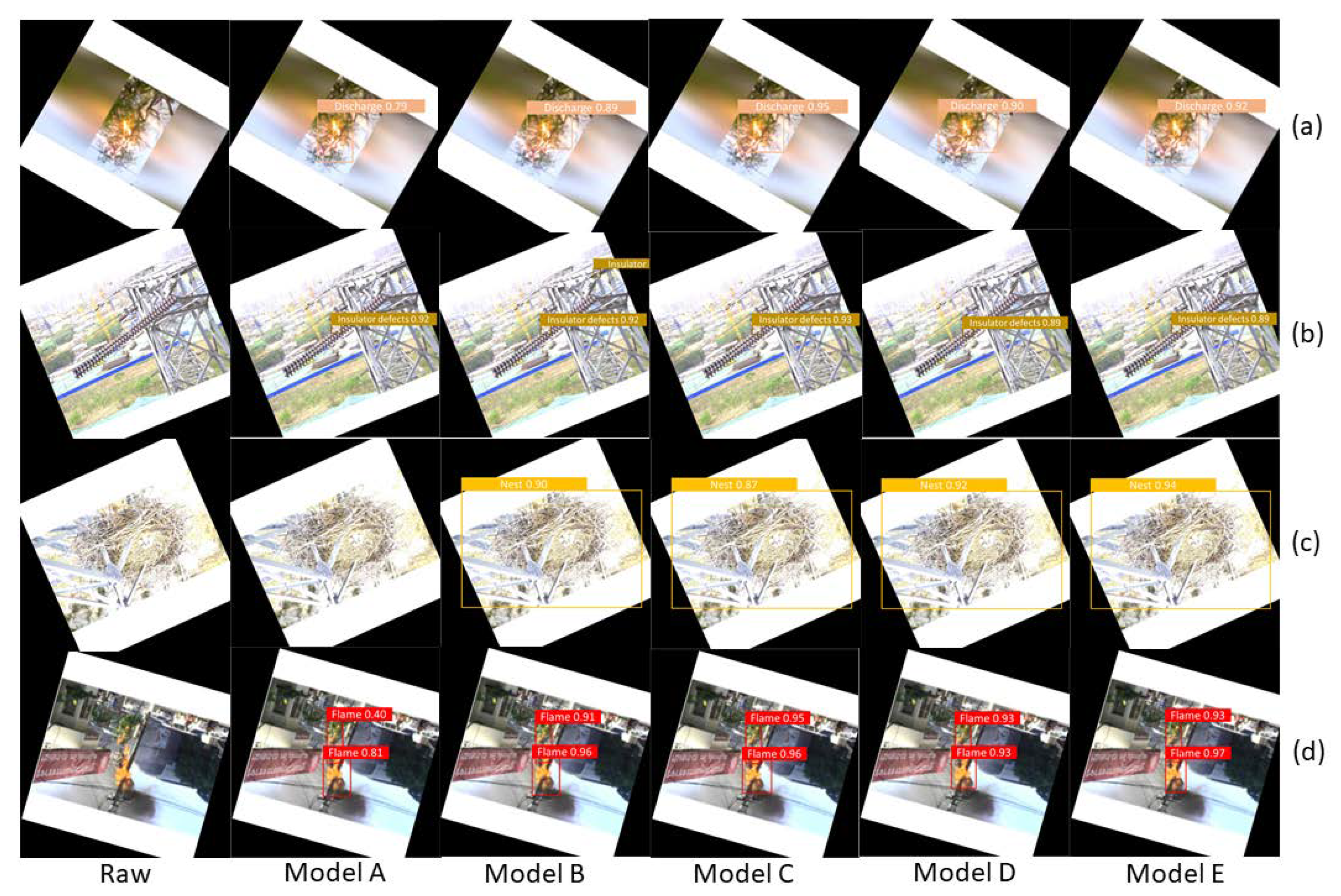
3.4. Results and Discussions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.; Pei, S.; Fu, W.; Zhang, K.; Ji, X.; Yin, Z. The discrimination method as applied to a deteriorated porcelain insulator used in transmission lines on the basis of a convolution neural network. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 3559–3566. [Google Scholar] [CrossRef]
- Castillo, A. Risk analysis and management in power outage and restoration: A literature survey. Electr. Power Syst. Res. 2014, 107, 9–15. [Google Scholar] [CrossRef]
- National, T. Jordan Hit by Widespread Power Cut. The National. 21 May 2021. Available online: https://www.thenationalnews.com/mena/jordan/jordan-hit-by-widespread-power-cut-1.1227062 (accessed on 20 May 2022).
- Puerto Rico Outage: An Electrical Substation Fire Has Knocked Out Power to 400,000 throughout the Island—CNN. Available online: https://edition.cnn.com/2021/06/10/us/puerto-rico-substation-fire-power-outage/index.html (accessed on 20 May 2022).
- Tavakoli, M.; Nafar, M. Human reliability analysis in maintenance team of power transmission system protection. Prot. Control Mod. Power Syst 2020, 5, 26. [Google Scholar] [CrossRef]
- Bao, Y.; Wang, Y.; Huang, G.; Xia, J.; Chen, J.; Guo, C. Impact of human error on electrical equipment preventive maintenance policy. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2015; pp. 1–5, ISBN 9781467380409. [Google Scholar]
- Muniappan, M. A comprehensive review of DC fault protection methods in HVDC transmission systems. Prot. Control Mod. Power Syst. 2021, 6, 1. [Google Scholar] [CrossRef]
- Kumar, A.; Anwar, M.N.; Kumar, S. Sliding mode controller design for frequency regulation in an interconnected power system. Prot. Control Mod. Power Syst. 2021, 6, 6. [Google Scholar] [CrossRef]
- Injeti, S.K.; Thunuguntla, V.K. Optimal integration of DGs into radial distribution network in the presence of plug-in electric vehicles to minimize daily active power losses and to improve the voltage profile of the system using bio-inspired optimization algorithms. Prot. Control Mod. Power Syst. 2020, 5, 3. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Chen, K.; Li, M.; Luo, Y.; Liang, C.; Xu, Y. Review of protection and fault handling for a flexible DC grid. Prot. Control Mod. Power Syst. 2020, 5, 15. [Google Scholar] [CrossRef]
- Shao, G.W.; Liu, Z.; Fu, J.; Tan, J.Y.; Chen, Y.; Zhou, L.W. Research progress in unmanned aerial vehicle inspection technology on overhead transmission lines. High Volt. Eng. 2020, 46, 14–22. [Google Scholar]
- Wu, Y.; Zhao, G.; Hu, J.; Ouyang, Y.; Wang, S.X.; He, J.; Gao, F.; Wang, S. Overhead Transmission Line Parameter Reconstruction for UAV Inspection Based on Tunneling Magnetoresistive Sensors and Inverse Models. IEEE Trans. Power Deliv. 2019, 34, 819–827. [Google Scholar] [CrossRef]
- Chen, D.-Q.; Guo, X.-H.; Huang, P.; Li, F.-H. Safety Distance Analysis of 500 kV Transmission Line Tower UAV Patrol Inspection. IEEE Lett. Electromagn. Compat. Pract. Appl. 2020, 2, 124–128. [Google Scholar] [CrossRef]
- Zhai, Y.; Zhao, H.; Zhao, M.; Jiao, S. Design of Electric Patrol UAVs Based on a Dual Antenna System. Energies 2018, 11, 866. [Google Scholar] [CrossRef] [Green Version]
- Su, Z.; Qi, L.; Han, W.; Zhu, X.; Xi, X.; Wang, C.; Wang, P.; Nie, S. Danger tree detection and tree number estimation based on UAV LiDAR data. J. Univ. Chin. Acad. Sci. 2020, 37, 760. [Google Scholar]
- Han, S.; Yang, F.; Yang, G.; Gao, B.; Zhang, N.; Wang, D. Electrical equipment identification in infrared images based on ROI-selected CNN method. Electr. Power Syst. Res. 2020, 188, 106534. [Google Scholar] [CrossRef]
- Serikbay, A.; Bagheri, M.; Zollanvari, A.; Phung, B.T. Accurate Surface Condition Classification of High Voltage Insulators based on Deep Convolutional Neural Networks. IEEE Trans. Dielect. Electr. Insul. 2021, 28, 2126–2133. [Google Scholar] [CrossRef]
- Liu, Y.; Ji, X.; Pei, S.; Ma, Z.; Zhang, G.; Lin, Y.; Chen, Y. Research on automatic location and recognition of insulators in substation based on YOLOv3. High Volt. 2020, 5, 62–68. [Google Scholar] [CrossRef]
- Prates, R.M.; Cruz, R.; Marotta, A.P.; Ramos, R.P.; Simas Filho, E.F.; Cardoso, J. Insulator visual non-conformity detection in overhead power distribution lines using deep learning. Comput. Electr. Eng. 2019, 78, 343–355. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Moghadas Nejad, F.; Zakeri, H. A comparison of multi-resolution methods for detection and isolation of pavement distress. Expert Syst. Appl. 2011, 38, 2857–2872. [Google Scholar] [CrossRef]
- Iruansi, U.; Tapamo, J.R.; Davidson, I.E. An active contour approach to insulator segmentation. In Proceedings of the AFRICON 2015, Addis Ababa, Ethiopia, 14–17 September 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Salari, E.; Bao, G. Pavement distress detection and severity analysis. In Image Processing: Machine Vision Applications IV; SPIE: Bellingham, WA, USA, 2011; pp. 107–116. [Google Scholar]
- Wang, X.; Zhang, Y. Insulator identification from aerial images using Support Vector Machine with background suppression. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS’16), Key Bridge Marriott, Arlington, VA, USA, 6 July–6 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 892–897, ISBN 9781467393348. [Google Scholar]
- Zhao, W.; Cheng, X.; Zhao, Z.; Zhai, Y. Insulator recognition based on attention mechanism and Faster RCNN. CAAI Trans. Intell. Syst. 2020, 15, 92–98. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. 2017. Available online: http://arxiv.org/pdf/1703.06870v3 (accessed on 23 May 2022).
- Girshick, R. Fast R-CNN. Advanced Engineering Informatics. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region. Proposal Networks. 2015. Available online: http://arxiv.org/pdf/1506.01497v3 (accessed on 23 May 2022).
- Zhao, Z.; Zhen, Z.; Zhang, L.; Qi, Y.; Kong, Y.; Zhang, K. Insulator Detection Method in Inspection Image Based on Improved Faster R-CNN. Energies 2019, 12, 1204. [Google Scholar] [CrossRef] [Green Version]
- Kang, G.; Gao, S.; Yu, L.; Zhang, D. Deep Architecture for High-Speed Railway Insulator Surface Defect Detection: Denoising Autoencoder With Multitask Learning. IEEE Trans. Instrum. Meas. 2019, 68, 2679–2690. [Google Scholar] [CrossRef]
- Cheng, Y.; Chen, C.; Gan, Z. Enhanced Single Shot MultiBox Detector for Pedestrian Detection. In Proceedings of the 3rd International Conference on Computer Science and Application Engineering—CSAE 2019, Sanya, China, 22–24 October 2019; Emrouznejad, A., Xu, Z., Eds.; ACM Press: New York, NY, USA, 2019; pp. 1–7, ISBN 9781450362948. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. 2015. Available online: http://arxiv.org/pdf/1506.02640v5 (accessed on 23 May 2022).
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. 2017. Available online: http://arxiv.org/pdf/1708.02002v2 (accessed on 14 July 2022).
- Liu, C.; Wu, Y.; Liu, J.; Sun, Z. Improved YOLOv3 Network for Insulator Detection in Aerial Images with Diverse Background Interference. Electronics 2021, 10, 771. [Google Scholar] [CrossRef]
- Chen, B.; Miao, X. Distribution Line Pole Detection and Counting Based on YOLO Using UAV Inspection Line Video. J. Electr. Eng. Technol. 2020, 15, 441–448. [Google Scholar] [CrossRef]
- Liu, M.; Zheng, T.; Wu, J. A target detection algorithm with local space embedded attention. In Proceedings of the 2021 International Conference on Neural Networks, Information and Communication Engineering, Qingdao, China, 27–28 August 2021; Zhang, Z., Ed.; SPIE/International Society for Optical Engineering: Bellingham, WA, USA, 2021; p. 102, ISBN 9781510647374. [Google Scholar]
- Hong, F.; Song, J.; Meng, H.; Wang, R.; Fang, F.; Zhang, G. A novel framework on intelligent detection for module defects of PV plant combining the visible and infrared images. Sol. Energy 2022, 236, 406–416. [Google Scholar] [CrossRef]
- Liu, M.; Li, Z.; Li, Y.; Liu, Y. A Fast and Accurate Method of Power Line Intelligent Inspection Based on Edge Computing. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Feng, Z.; Guo, L.; Huang, D.; Li, R. Electrical Insulator Defects Detection Method Based on YOLOv5. In Proceedings of the 2021 IEEE 10th Data Driven Control and Learning Systems Conference (DDCLS’21), Suzhou, China, 14–16 May 2021; Sun, M., Zhang, H., Eds.; IEEE: Piscataway, NJ, USA, 2021; pp. 979–984, ISBN 9781665424233. [Google Scholar]
- Li, Q.; Zhao, F.; Xu, Z.; Wang, J.; Liu, K.; Qin, L. Insulator and Damage Detection and Location Based on YOLOv5. In Proceedings of the 2022 International Conference on Power Energy Systems and Applications (ICoPESA), Singapore, 25–27 February 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 17–24, ISBN 9781665410977. [Google Scholar]
- Xu, R.; Lin, H.; Lu, K.; Cao, L.; Liu, Y. A Forest Fire Detection System Based on Ensemble Learning. Forests 2021, 12, 217. [Google Scholar] [CrossRef]
- Ultralytics. Yolov5. Available online: https://github.com/ultralytics/yolov5 (accessed on 1 January 2021).
- Jiang, Z.; Zhao, L.; Li, S. Real-time object detection method based on improved YOLOv4-tiny. arXiv 2020, arXiv:2011.04244. [Google Scholar]
- GitHub. lp6m/yolov5s_android: Run yolov5s on Android Device! Available online: https://github.com/lp6m/yolov5s_android (accessed on 22 May 2022).
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Ma, N.; Zhang, X.; Zheng, H.-T.; Sun, J. ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design. In Proceedings of the Computer Vision—ECCV 2018: 15th European Conference, Munich, Germany, 8–14 September 2018; Ferrari, V., Ed.; Springer: Cham, Switzerland, 2018; pp. 122–138, ISBN 9783030012632. [Google Scholar]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. GhostNet: More Features From Cheap Operations. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; Mortensen, E., Masson-Forsythe, M., Eds.; IEEE: Piscataway, NJ, USA, 2020; pp. 1577–1586, ISBN 9781728171685. [Google Scholar]
- GitHub. huawei-noah/CV-Backbones: CV Backbones Including GhostNet, TinyNet and TNT, Developed by Huawei Noah’s Ark Lab. Available online: https://github.com/huawei-noah/CV-Backbones (accessed on 23 May 2022).
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and Efficient Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Du, F.-J.; Jiao, S.-J. Improvement of Lightweight Convolutional Neural Network Model Based on YOLO Algorithm and Its Research in Pavement Defect Detection. Sensors 2022, 22, 3537. [Google Scholar] [CrossRef]
- Liu, C.; Wu, Y.; Liu, J.; Sun, Z.; Xu, H. Insulator Faults Detection in Aerial Images from High-Voltage Transmission Lines Based on Deep Learning Model. Appl. Sci. 2021, 11, 4647. [Google Scholar] [CrossRef]
- GitHub. zylo117/Yet-Another-EfficientDet-Pytorch: The Pytorch Re-Implement of the Official Efficientdet with SOTA Performance in Real Time and Pretrained Weights. Available online: https://github.com/zylo117/Yet-Another-EfficientDet-Pytorch (accessed on 23 May 2022).
- Li, B.; Yao, Y.; Tan, J.; Zhang, G.; Yu, F.; Lu, J.; Luo, Y. Equalized Focal Loss for Dense Long-Tailed Object Detection. 2022. Available online: https://arxiv.org/pdf/2201.02593 (accessed on 23 May 2022).
- GitHub. ModelTC/EOD: Easy and Efficient Object Detector. Available online: https://github.com/ModelTC/EOD (accessed on 23 May 2022).
- Read, P.; Meyer, M.-P. Restoration of Motion Picture Film; Butterworth-Heinemann: Oxford, UK, 2000; ISBN 075062793X. [Google Scholar]
- Tao, X.; Zhang, D.; Wang, Z.; Liu, X.; Zhang, H.; Xu, D. Detection of Power Line Insulator Defects Using Aerial Images Analyzed With Convolutional Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1486–1498. [Google Scholar] [CrossRef]
- GitHub. InsulatorData/InsulatorDataSet: Provide Normal Insulator Images Captured by UAVs and Synthetic Defective Insulator Images. Available online: https://github.com/InsulatorData/InsulatorDataSet (accessed on 24 May 2022).
- Cheng, L.; Li, J.; Duan, P.; Wang, M. A small attentional YOLO model for landslide detection from satellite remote sensing images. Landslides 2021, 18, 2751–2765. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Backbone | Head | ||||||
|---|---|---|---|---|---|---|---|
| From | Number | Module | Args | From | Number | Module | Args |
| −1 | 1 | Focus | 64, 3 | −1 | 1 | GhostConv | 512, 1, 1 |
| −1 | 1 | Conv | 128, 3, 2 | −1 | 1 | Upsample | None, 2, nearest |
| −1 | 3 | C3 | 128 | −1 | 6 | Concat_B | 256, 256 |
| −1 | 1 | Conv | 256, 3, 2 | −1 | 3 | C3 | 512, False |
| −1 | 9 | C3 | 256 | −1 | 1 | Conv | 256, 1, 1 |
| −1 | 1 | Conv | 512, 3, 2 | −1 | 1 | Upsample | None, 2, nearest |
| −1 | 9 | C3 | 512 | −1 | 4 | Concat_B | 128, 128 |
| −1 | 1 | GhostConv | 1024, 3, 2 | −1 | 3 | C3 | 256, False |
| −1 | 1 | SPP | 5, 9, 13 | −1 | 1 | Conv | 512, 3, 2 |
| −1 | 3 | C3 | 1024, False | −1 | 6, 13 | Concat_B | 256, 256 |
| −1 | 3 | C3 | 512, False | ||||
| −1 | 1 | GhostConv | 1024, 3, 2 | ||||
| −1 | 9 | Concat_B | 512, 512 | ||||
| −1 | 3 | C3 | 1024, False | ||||
| Name | CPU | GPU | System | Framework | Accelerator |
|---|---|---|---|---|---|
| Disposition | Intel(R) Xeon(R) Gold 5218 | GeForce RTX 2080 Ti/11GB | ubuntu18.04 | pytorch1.7.0 | CUDA10.2 cuDNN7 |
| Name | Epoch | Learning Style | lr0 | lrf |
|---|---|---|---|---|
| Disposition | 1000 | Cosine annealing | 0.001 | 0.2 |
| Evaluate Metrics | Model A | Model B | Model C | Model D | Model E |
|---|---|---|---|---|---|
| mAP@.5 | 0.904 | 0.956 | 0.956 | 0.944 | 0.973 |
| mAP@.5:.95 | 0.544 | 0.701 | 0.701 | 0.666 | 0.719 |
| Presion | 0.864 | 0.984 | 0.984 | 0.982 | 0.961 |
| Recall | 0.877 | 0.95 | 0.943 | 0.938 | 0.971 |
| F1-score | 0.871 | 0.967 | 0.963 | 0.959 | 0.966 |
| FPS | 179 | 133 | 185 | 185 | 172 |
| GFLOPs | 12.9 | 16.4 | 17.7 | 15.9 | 16.7 |
| Parameters | 8,673,622 | 7,062,001 | 8,128,256 | 7,357,157 | 6,899,333 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, F.; Jiao, S.; Chu, K. Research on Safety Detection of Transmission Line Disaster Prevention Based on Improved Lightweight Convolutional Neural Network. Machines 2022, 10, 588. https://doi.org/10.3390/machines10070588
Du F, Jiao S, Chu K. Research on Safety Detection of Transmission Line Disaster Prevention Based on Improved Lightweight Convolutional Neural Network. Machines. 2022; 10(7):588. https://doi.org/10.3390/machines10070588
Chicago/Turabian StyleDu, Fujun, Shuangjian Jiao, and Kaili Chu. 2022. "Research on Safety Detection of Transmission Line Disaster Prevention Based on Improved Lightweight Convolutional Neural Network" Machines 10, no. 7: 588. https://doi.org/10.3390/machines10070588