
Dynamic Properties of Chain Drive in a Scraper Conveyor under Various Working Conditions

Abstract
:1. Introduction
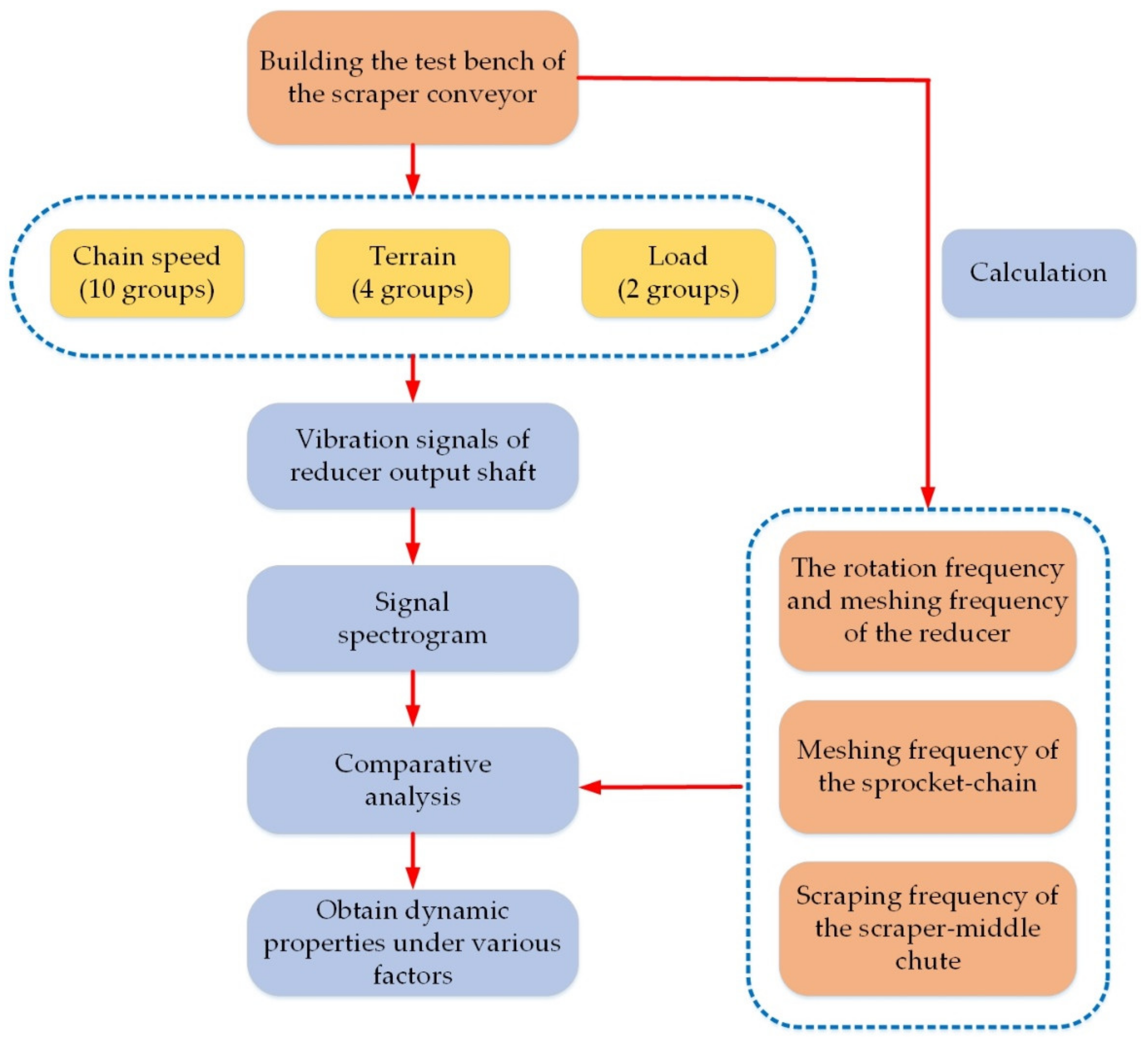
2. Dynamic Properties Test
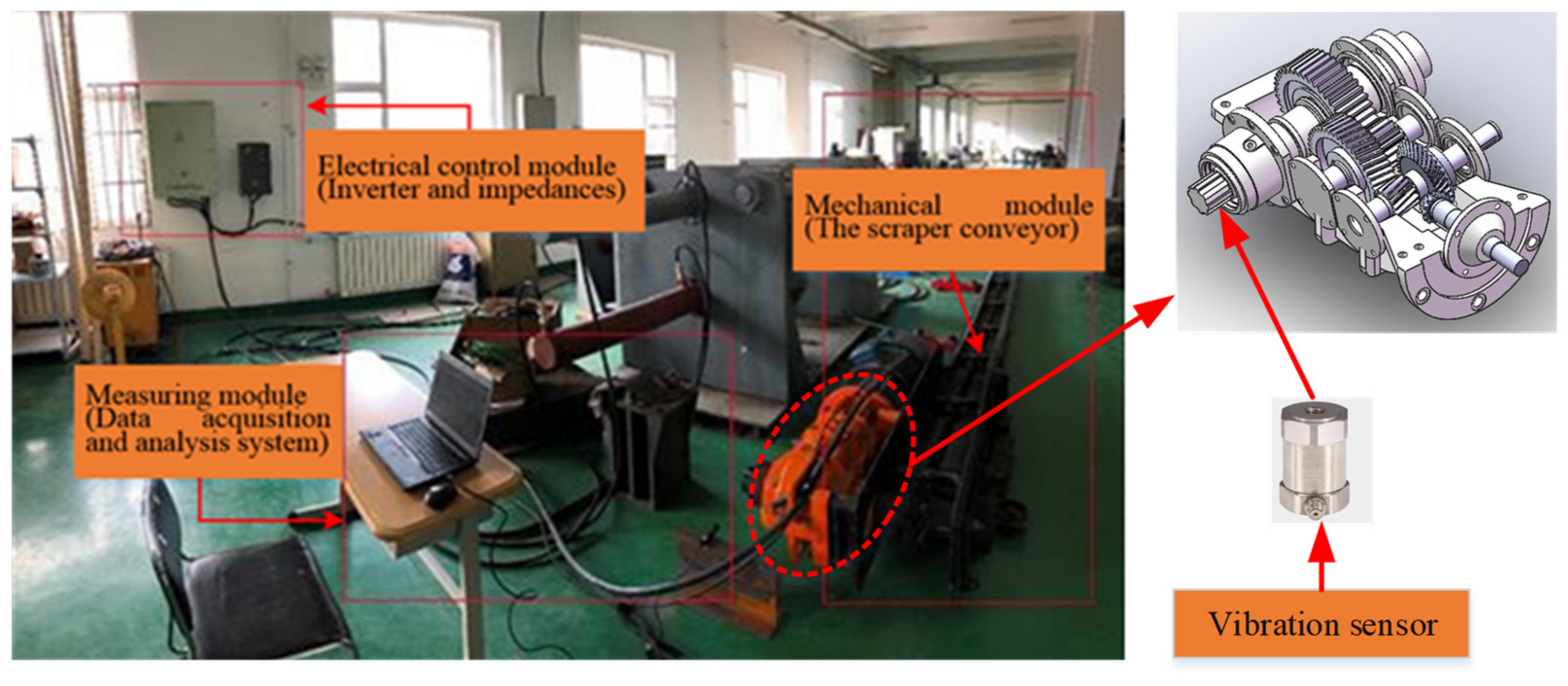
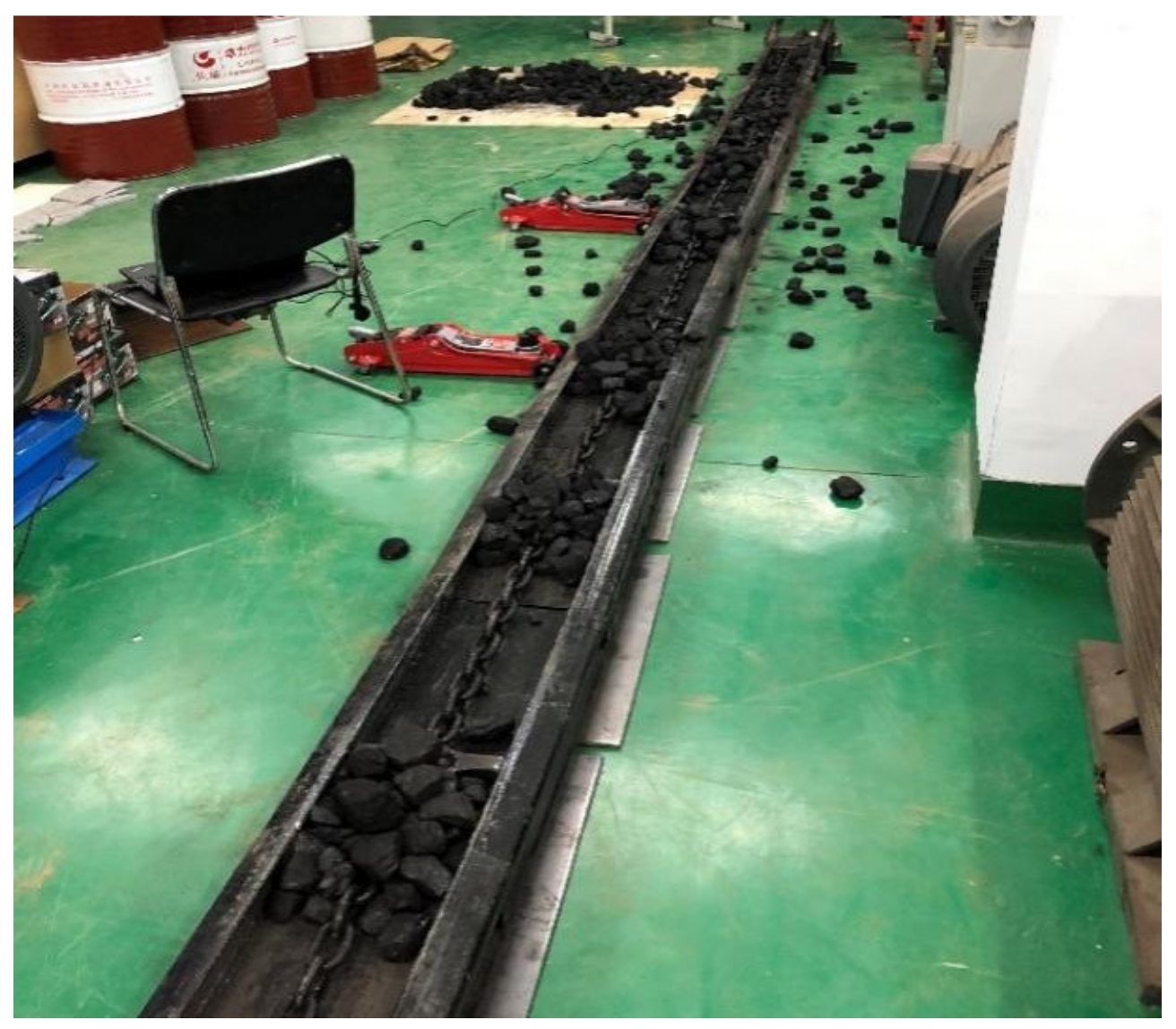
2.1. Construction of the Test Bench
2.2. Test Scheme
2.2.1. Chain Speed
2.2.2. Terrain
2.2.3. Load
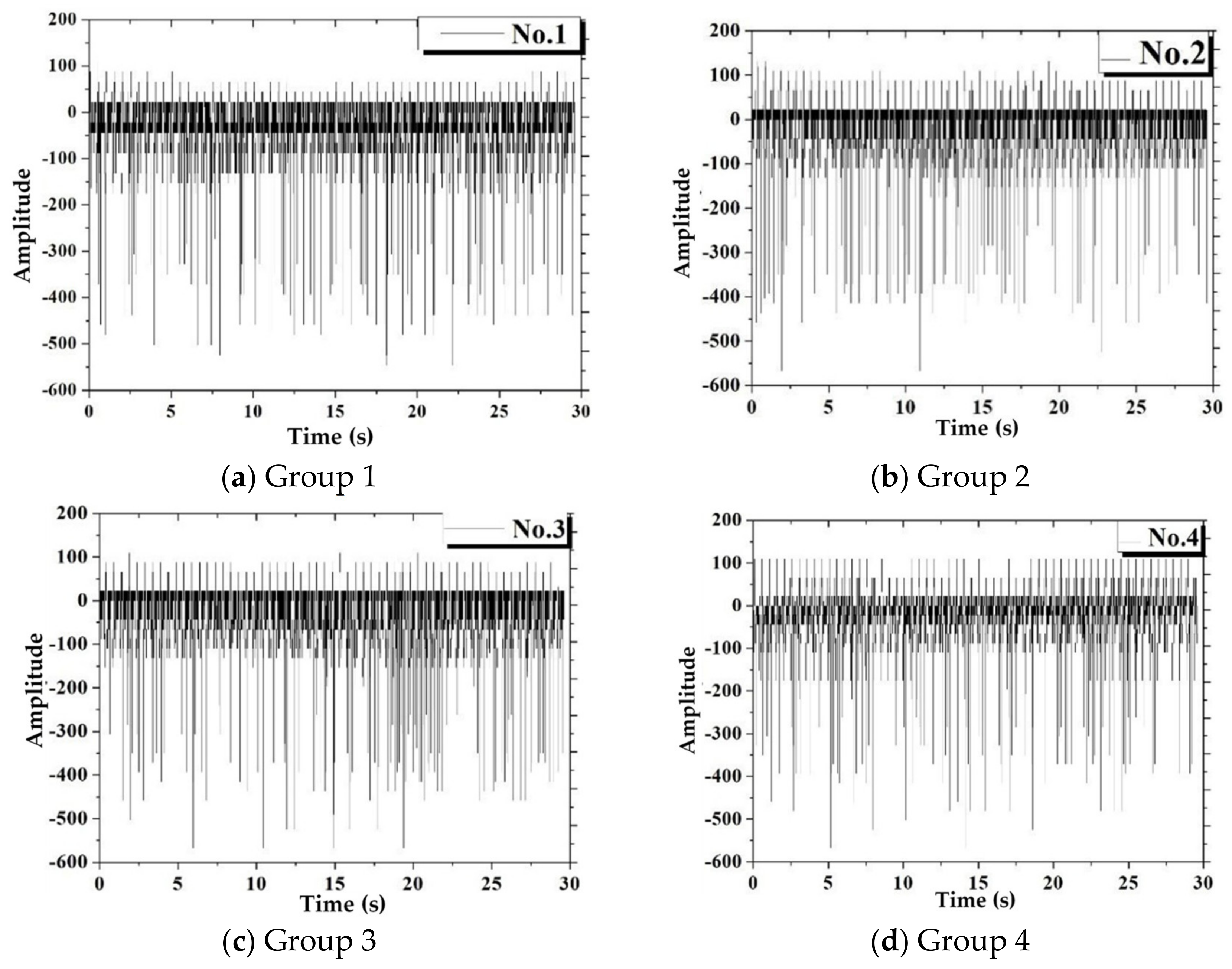
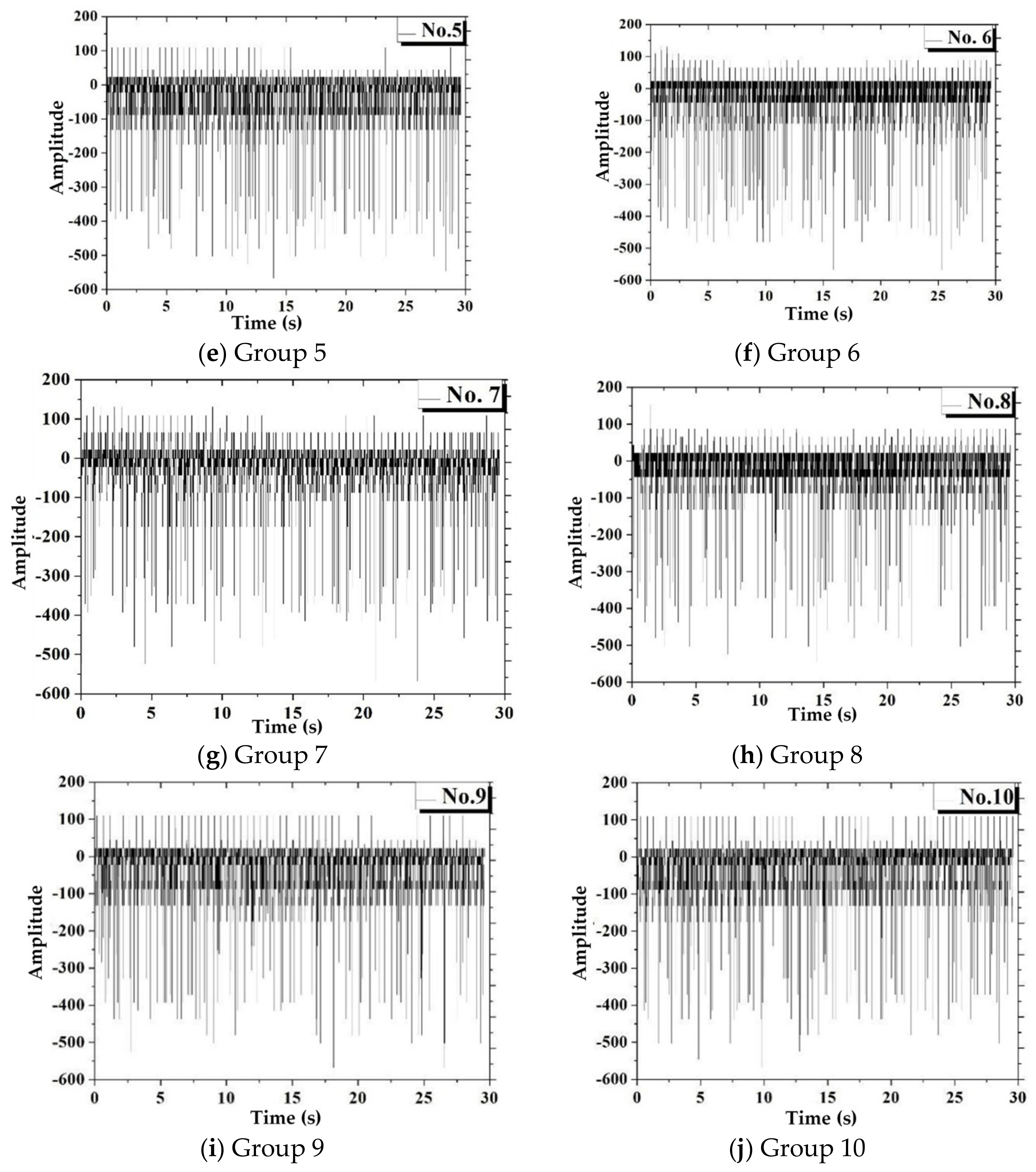
2.3. Test Stability Analysis
3. Test Results
3.1. Calculation of Frequency Value
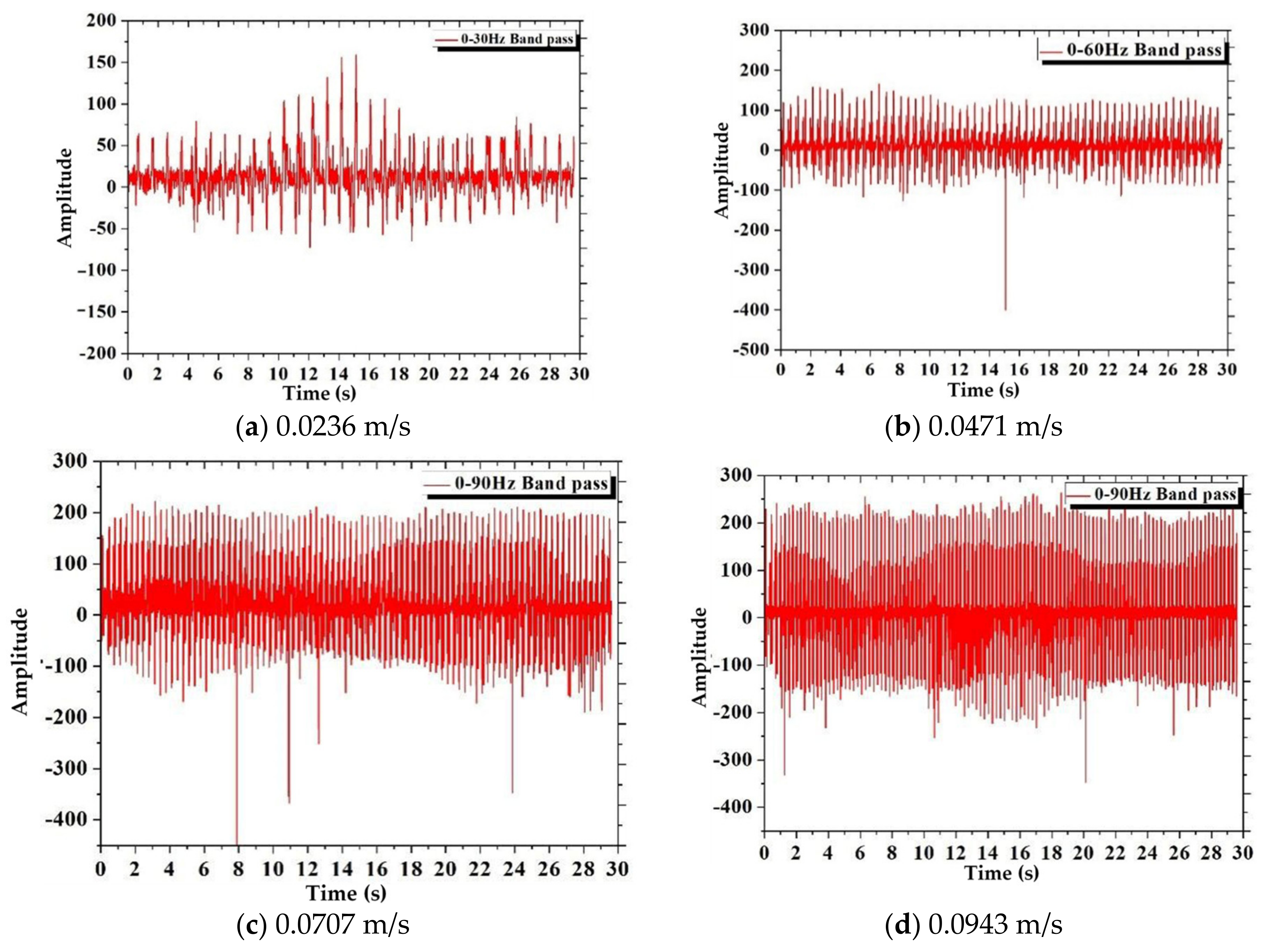
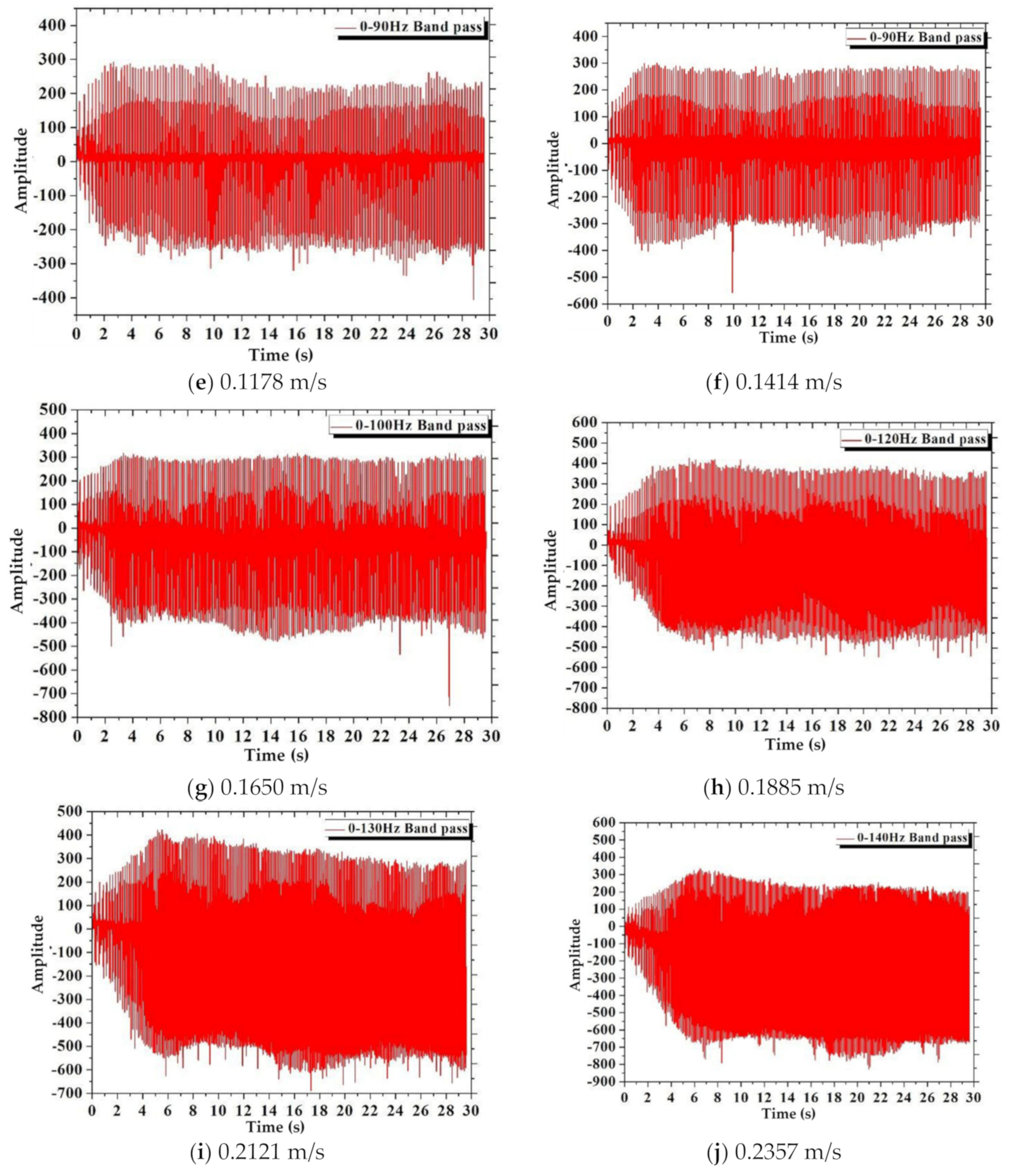
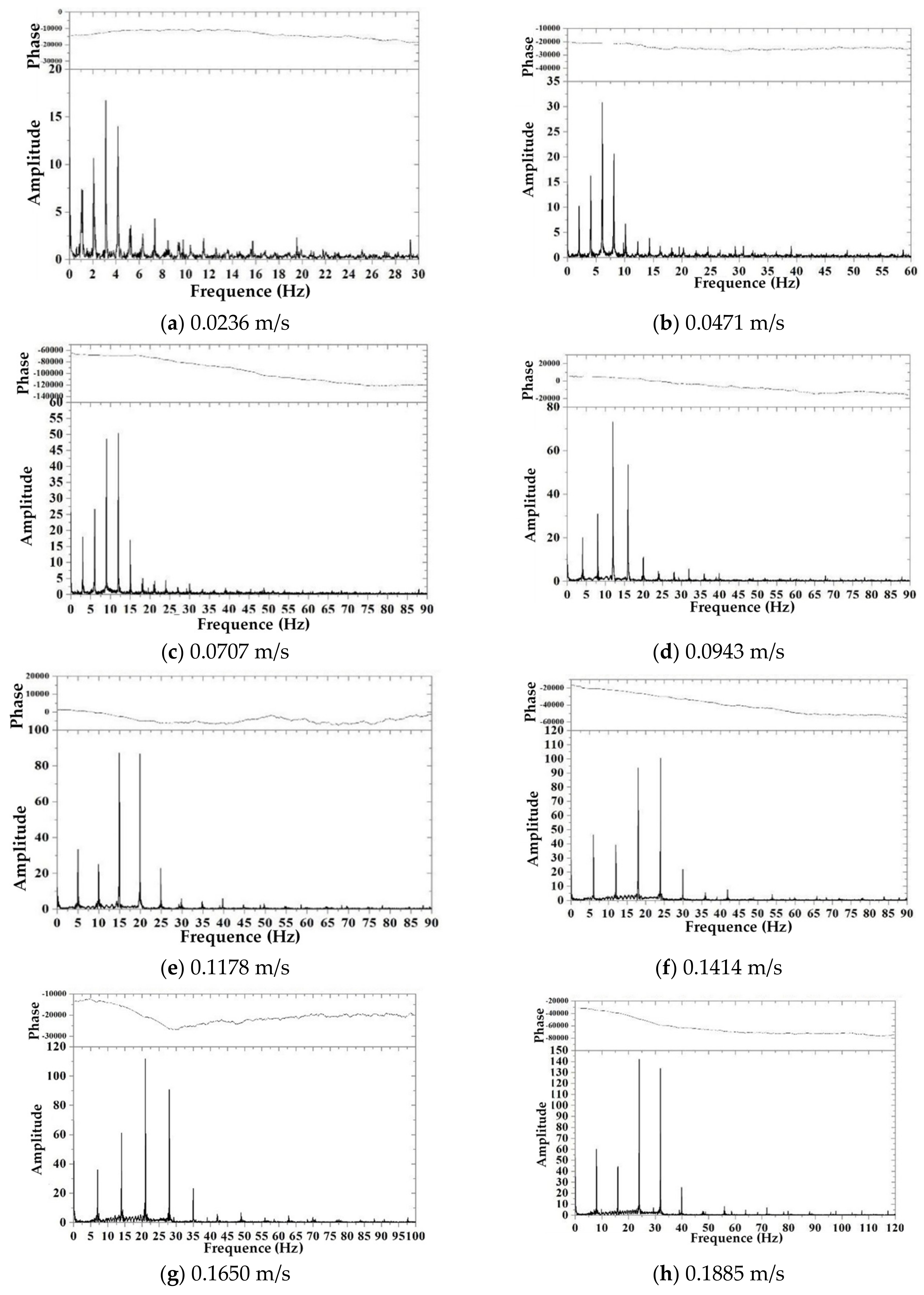
3.2. Chain Speed
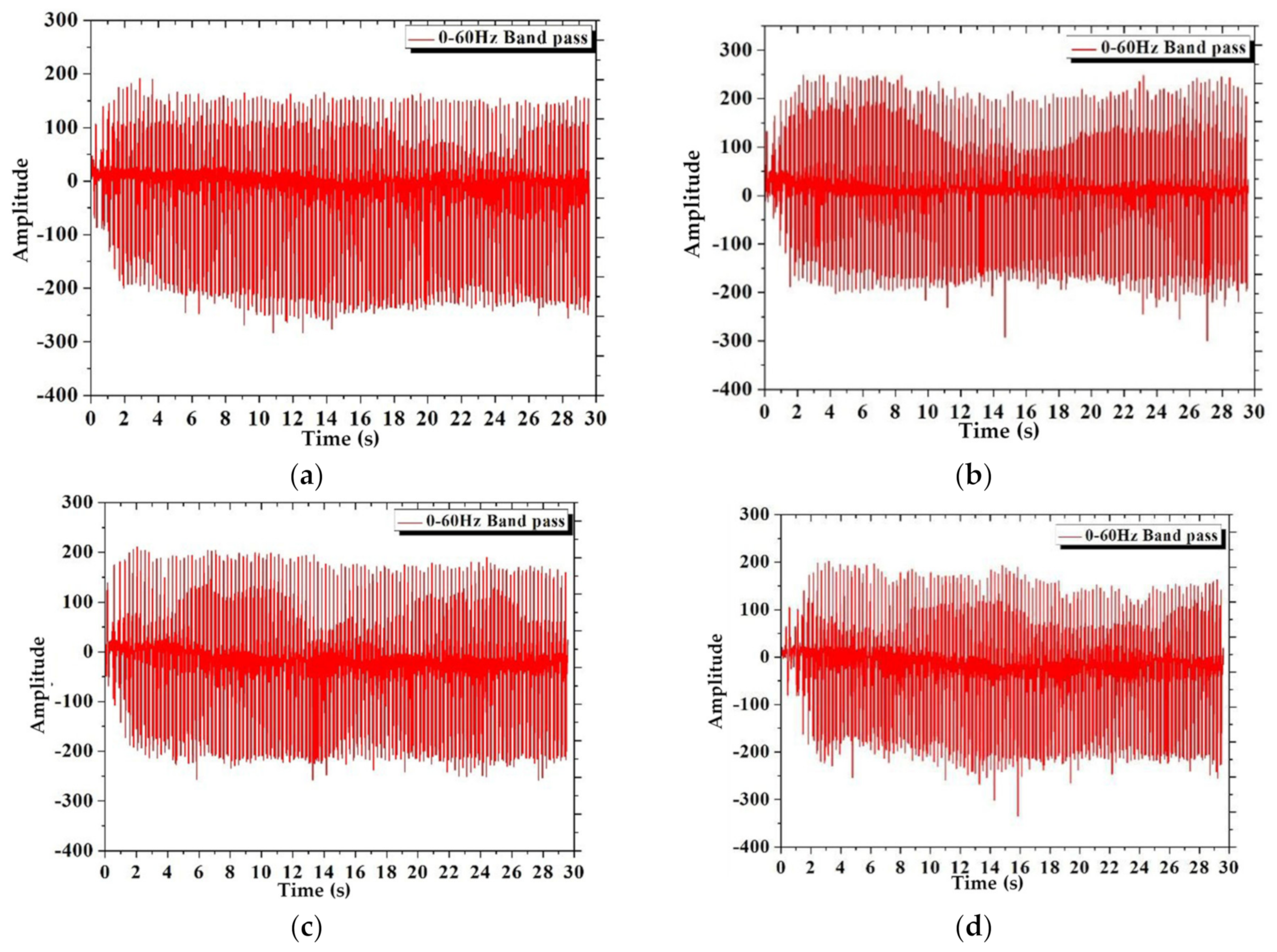
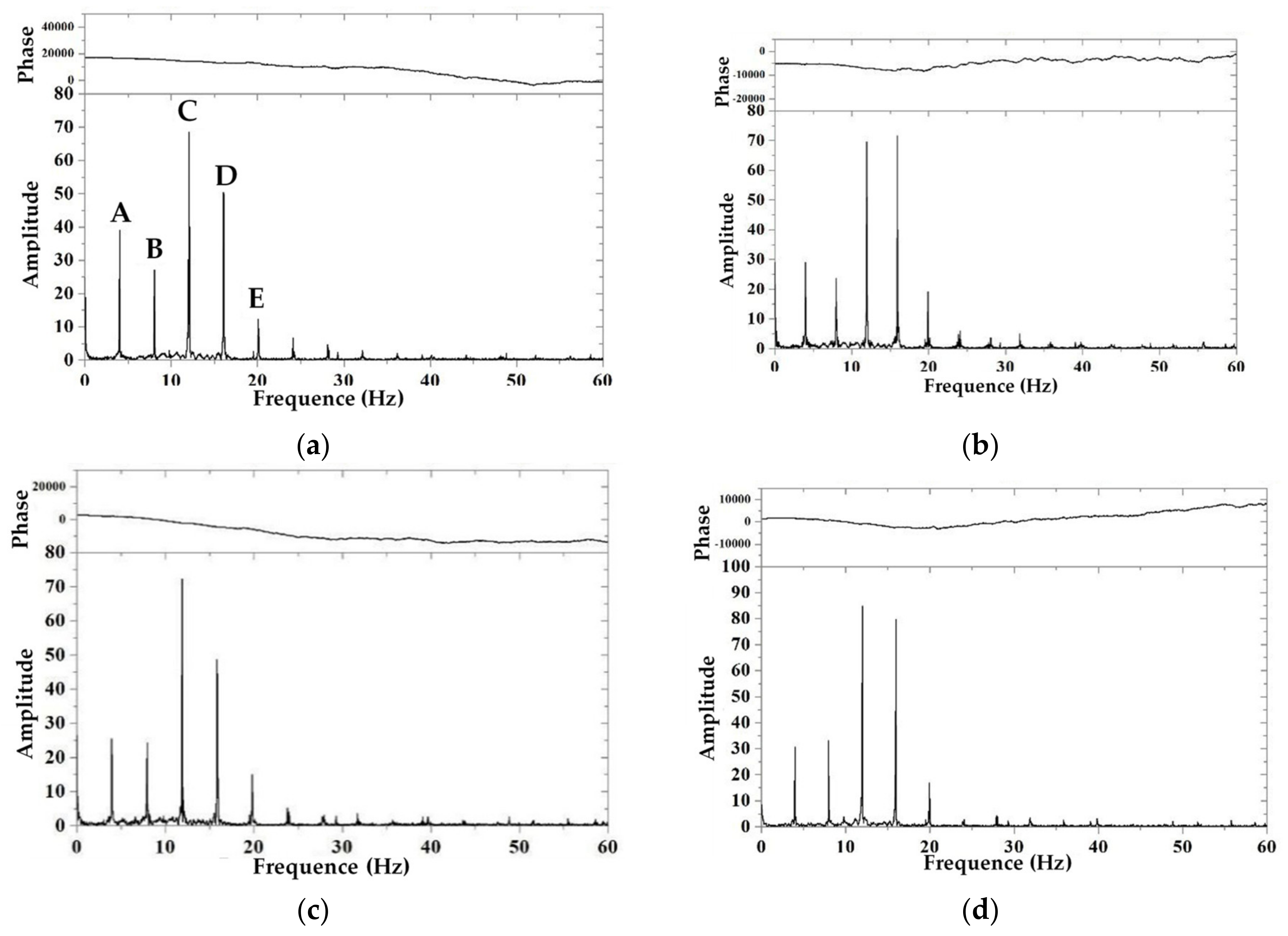
3.3. Terrain
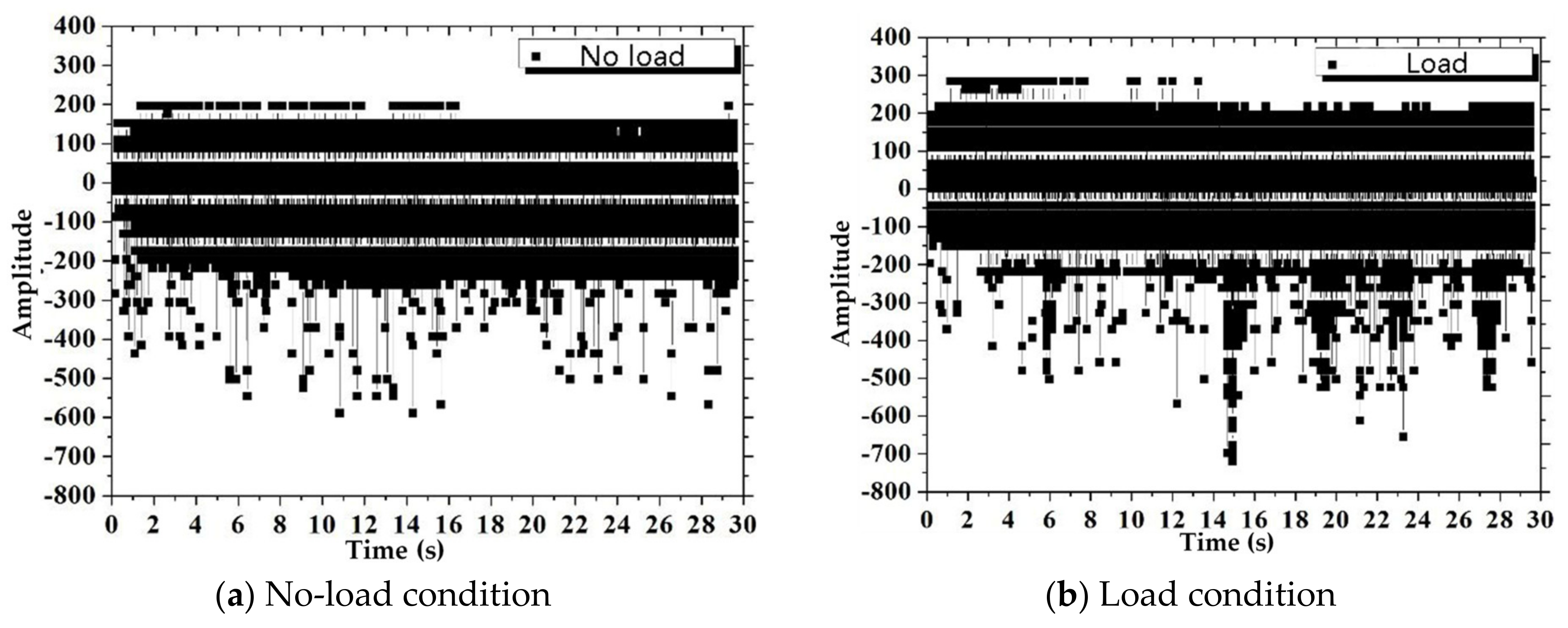
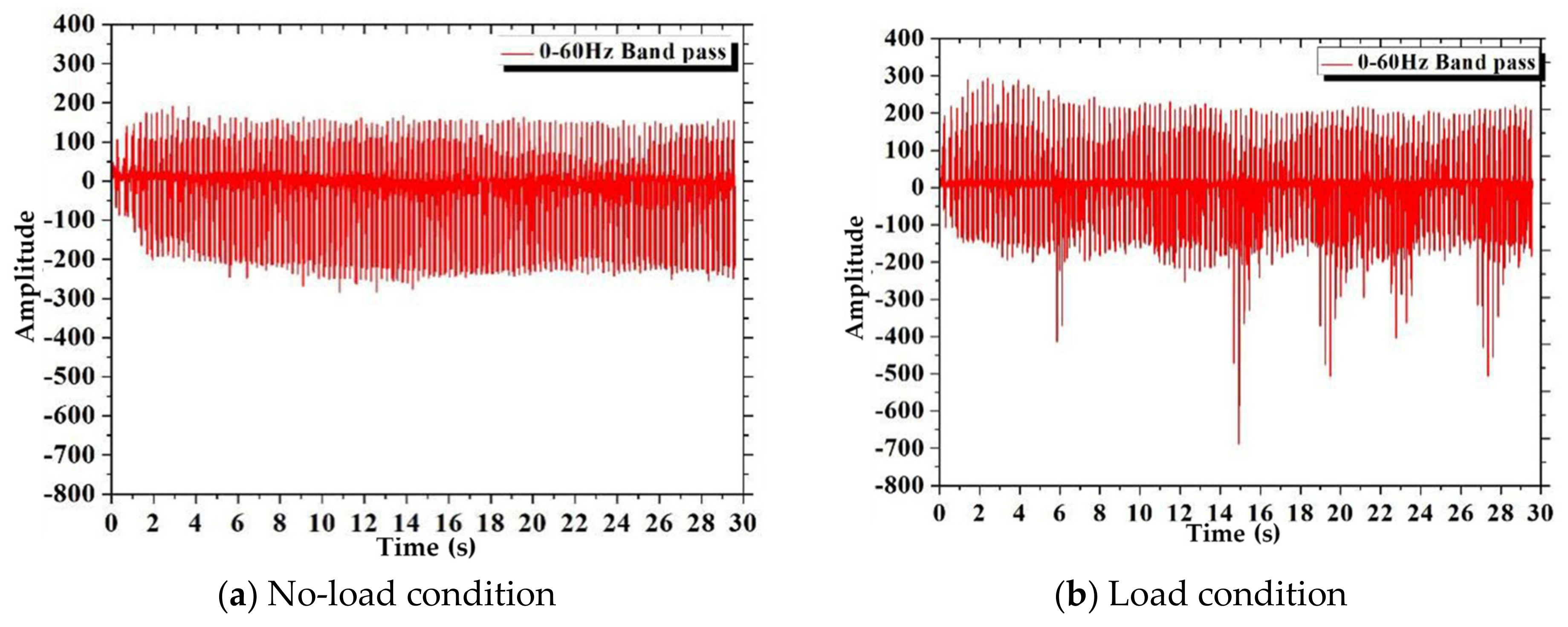
3.4. Load
4. Analysis and Discussion
5. Conclusions
- (1)
- Given that carrying out research in mines is unsuitable, a scraper conveyor test bench is built to comprehensively analyze the vibration of the output shaft of the reducer under different chain speeds, different terrains, and no-load/load conditions from the perspective of vibration. According to the frequency domain spectrum of the vibration signal, the dynamic properties of the drive system of the scraper conveyor are analyzed, and the overall health status of the scraper conveyor is inferred.
- (2)
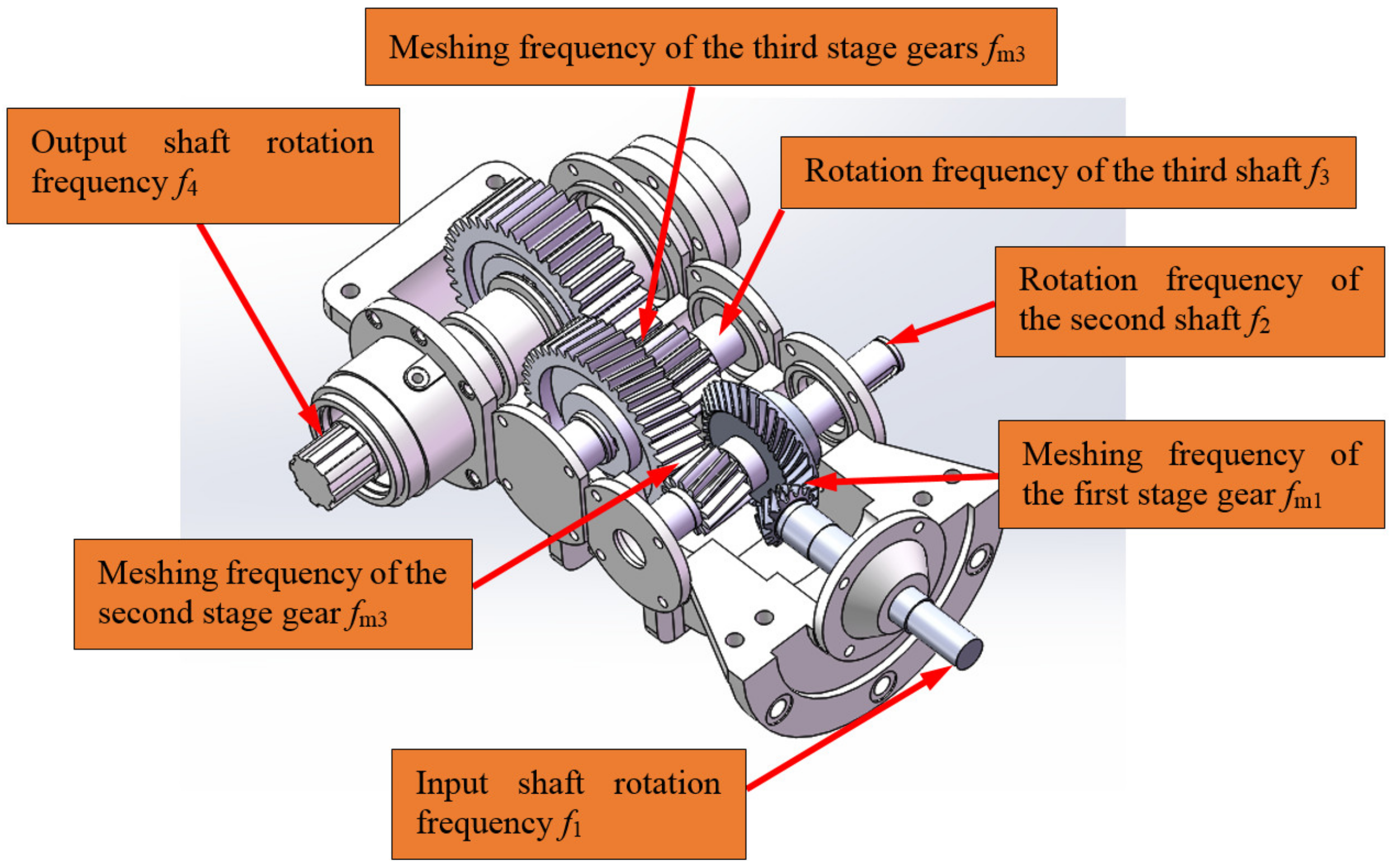
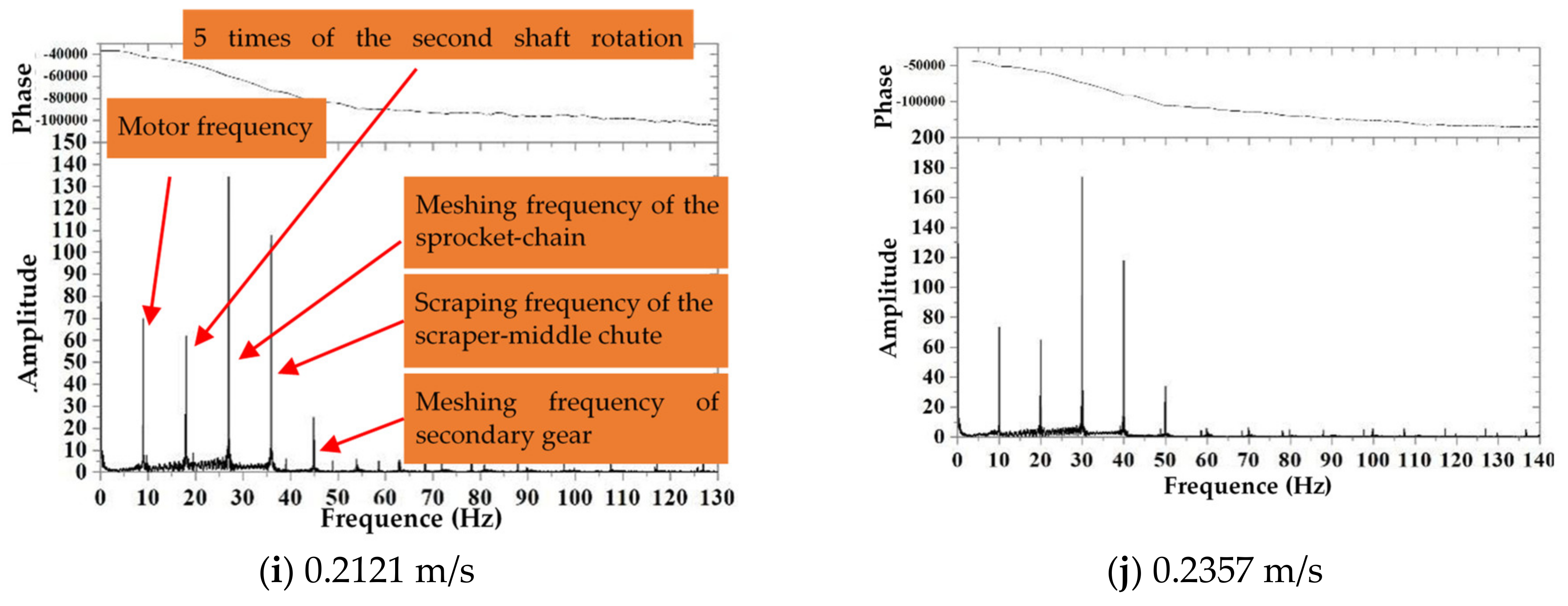
- In the drive system of the scraper conveyor, five main frequencies affect its dynamic performance: the motor rotation frequency, reducer second shaft rotation frequency, reducer secondary gear meshing frequency, sprocket–chain meshing frequency, and scraper–middle chute scraping frequency. With an increase in chain speed, the amplitude of the motor rotation frequency gradually increases, with a maximum value as high as 70, and the influence on the dynamic properties of the scraper conveyor gradually increases.
- (3)
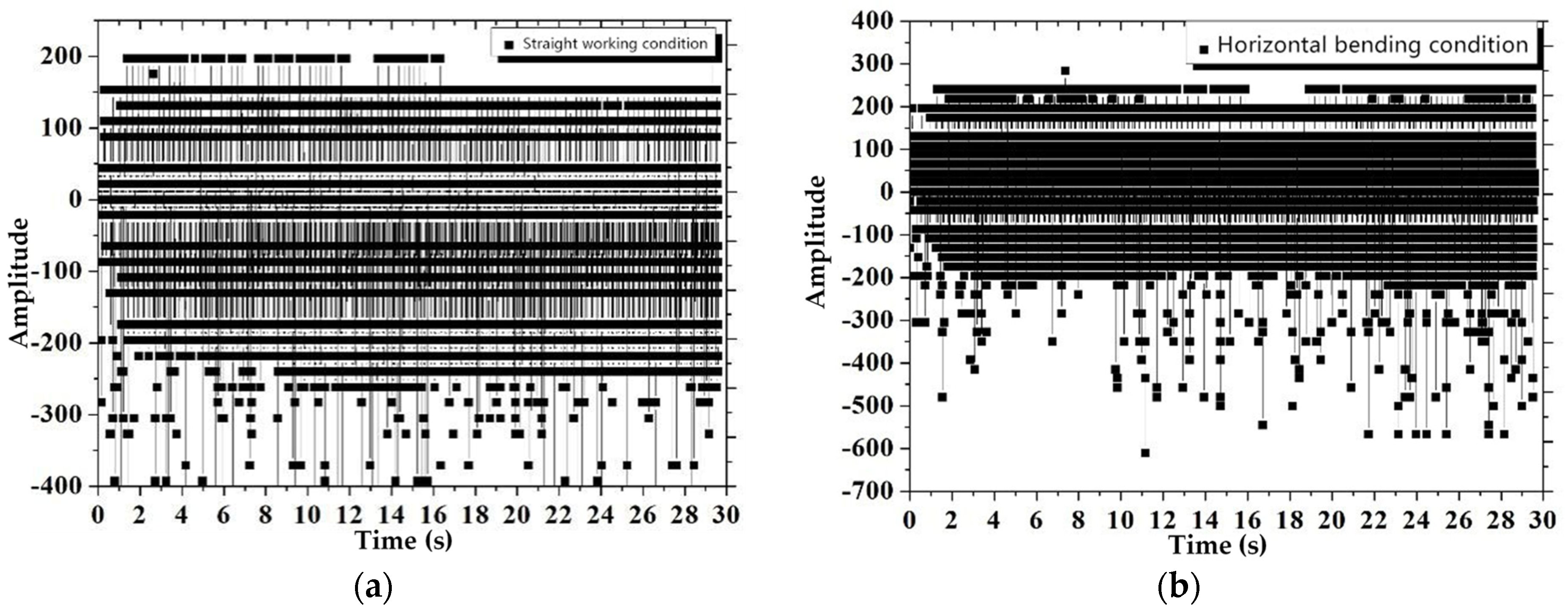
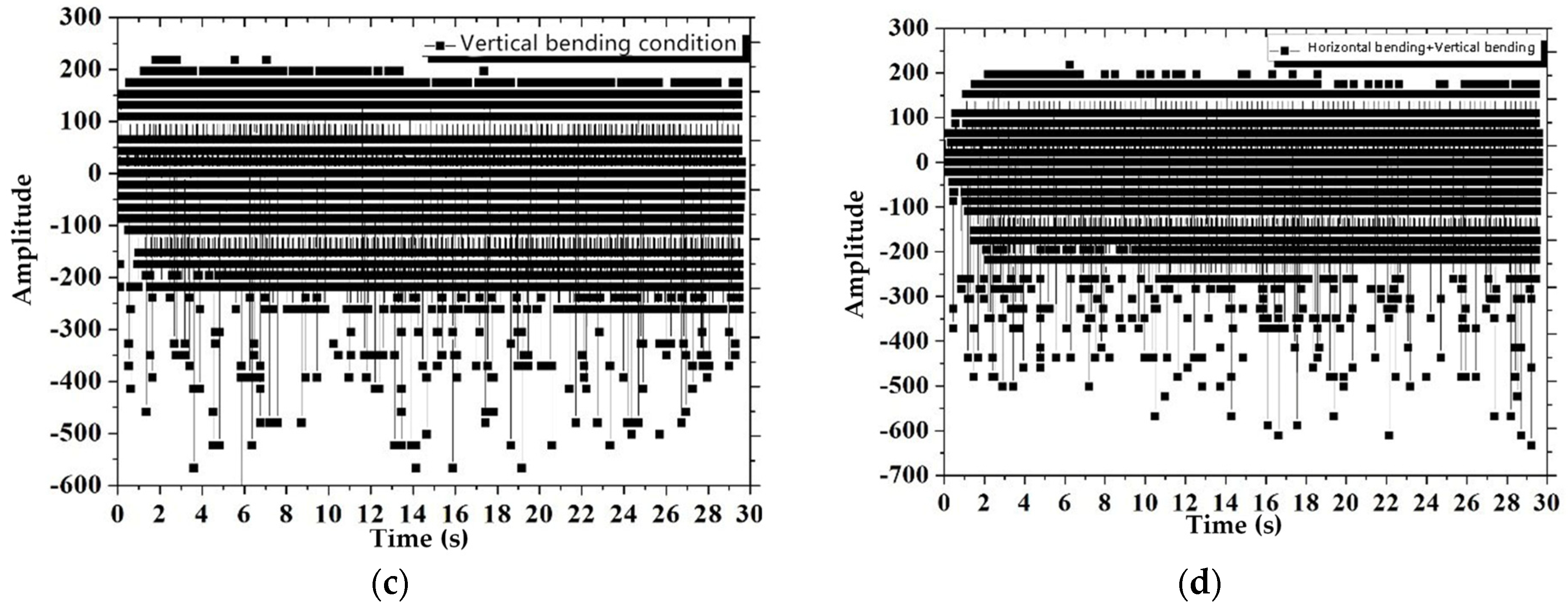
- Compared with other terrain conditions, the composite working condition of horizontal bending + vertical bending significantly impacts the meshing frequency of the sprocket–chain, and the amplitude increases to 85. In the horizontal bending condition, the amplitude of the scraping frequency of the scraper–middle chute increases significantly.
- (4)
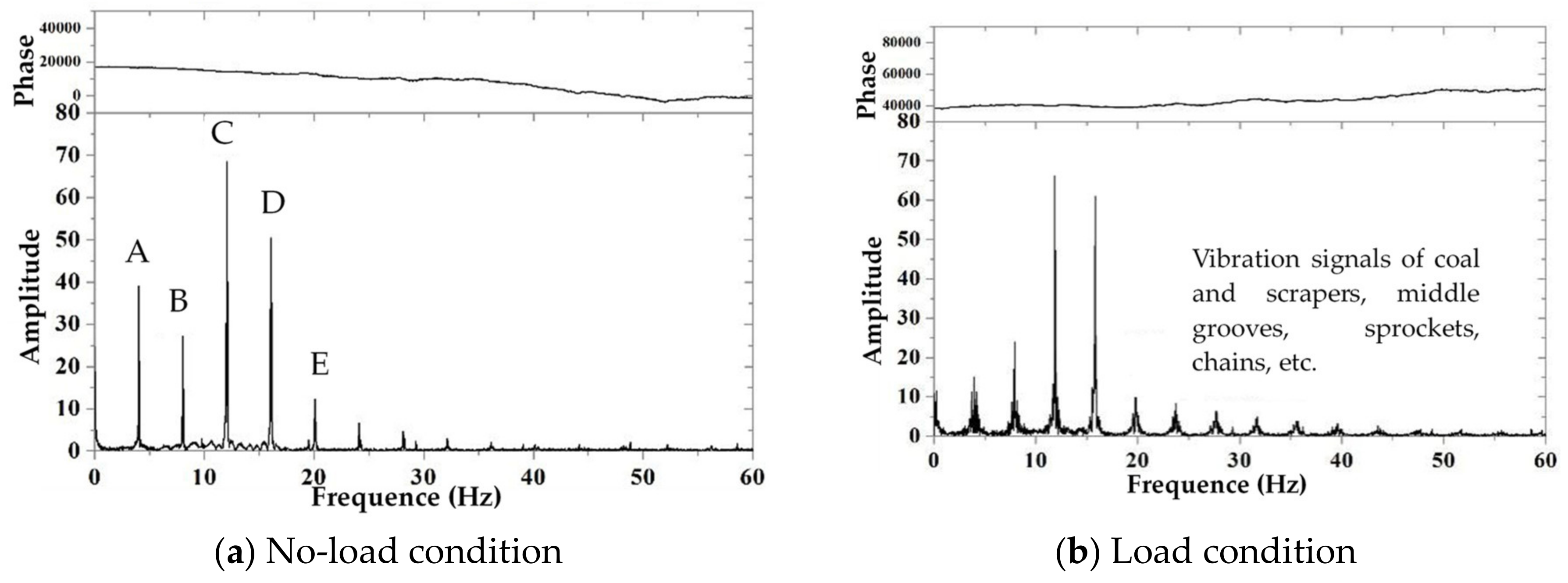
- Compared with the no-load condition, the rotational frequency amplitude of the motor output shaft under the load condition is significantly smaller, reducing from 40 to 15. The influence of the motor output shaft on the dynamic properties of the scraper conveyor is reduced, whereas the influence of the scraping frequency of the scraper–middle chute on the dynamic properties is increased.
- (5)
- This study examines the dynamic properties of a scraper conveyor under different working conditions by building a test bench, which is of great significance for improving the scraper conveyor’s dynamic properties and structural optimization design. Based on this study, the dynamic properties of the chain drive system under multi-source excitation can be analyzed from the perspective of vibration energy transfer.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wieczorek, A.N.; Wojcicki, M. Synergism of the binary wear process of machinery elements used for gaining energy raw materials. Energies 2021, 14, 1981. [Google Scholar] [CrossRef]
- Zhang, H.; Liao, Y.Y.; Tao, Z.; Lian, Z.S.; Zhao, R.H. Modeling and dynamic characteristics of a novel high-pressure and large-flow water hydraulic proportional valve. Machines 2022, 10, 37. [Google Scholar] [CrossRef]
- Hao, S.Q.; Wang, S.B.; Malekian, R.; Zhang, B.Y.; Liu, W.L.; Li, Z.X. A geometry surveying model and instrument of a scraper conveyor in unmanned longwall mining faces. IEEE Access 2017, 5, 4095–4103. [Google Scholar] [CrossRef]
- Fedorko, G.; Necas, J.; Zegzulka, J.; Gelnar, D.; Molnar, V.; Tomaskova, M. Measurement of amount for steel abrasive material transported by special scraper conveyor. Appl. Sci. 2021, 11, 1852. [Google Scholar] [CrossRef]
- Szurgacz, D.; Zhironkin, S.; Cehlar, M.; Voth, S.; Spearing, S.; Ma, L.Q. A step-by-step procedure for tests and assessment of the automatic operation of a powered roof support. Energies 2021, 14, 697. [Google Scholar] [CrossRef]
- Luo, C.M.; Fan, X.N.; Ni, J.J.; Yang, H.; Zhang, X.W.; Li, W. Positioning accuracy evaluation for the collaborative automation of mining fleet with the support of memory cutting technology. IEEE Access 2016, 4, 5764–5775. [Google Scholar] [CrossRef]
- Ding, H.; Liu, Y.C.; Liu, J.C. Volumetric tooth wear measurement of scraper conveyor sprocket using shape from focus-based method. Appl. Sci. 2019, 9, 1084. [Google Scholar] [CrossRef] [Green Version]
- Li, J.X.; Liang, S.W. Impact and friction of bulk material on the blanking area in the middle trough of scraper machine. J. Coast. Res. 2019, 93, 947–952. [Google Scholar] [CrossRef]
- Dolipski, M.; Cheluszka, P.; Remiorz, E.; Sobota, P. Follow-up chain tension in an armoured face conveyor. Arch. Min. Sci. 2015, 60, 25–38. [Google Scholar]
- Jiang, S.B.; Ren, W.J.; Mao, Q.H.; Zeng, Q.L.; Yu, P.F.; Gao, K.D.; Wang, L. Dynamic analysis of the scraper conveyor under abnormal operating conditions based on the vibration and speed characteristics. Shock Vib. 2021, 2021, 8887744. [Google Scholar] [CrossRef]
- Liu, X.S.; Fan, D.Y.; Tan, Y.L.; Song, S.L.; Li, X.F.; Ning, J.G.; Gu, Q.H.; Ma, Q. Failure evolution and instability mechanism of surrounding rock for close-distance chambers with super-large section in deep coal mines. Int. J. Geomech. 2021, 21, 04021049. [Google Scholar] [CrossRef]
- Liu, X.S.; Song, S.L.; Tan, Y.L.; Fan, D.Y.; Ning, J.G.; Li, X.B.; Yin, Y.C. Similar simulation study on the deformation and failure of surrounding rock of a large section chamber group under dynamic loading. Int. J. Min. Sci. Technol. 2021, 31, 495–505. [Google Scholar] [CrossRef]
- Liu, X.S.; Fan, D.Y.; Tan, Y.L.; Ning, J.G.; Song, S.L.; Wang, H.L.; Li, X.B. New detecting method on the connecting fractured zone above the coal face and a case study. Rock Mech. Rock Eng. 2021, 54, 4379–4391. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Yang, X.F.; Xu, S.Y. Composite sliding mode control of a permanent magnet direct-driven system for a mining scraper conveyor. IEEE Access 2017, 5, 22399–22408. [Google Scholar] [CrossRef]
- Li, L.; Cui, H.W.; Lian, Z.S.; Wang, Q.L. Modeling and optimization of soft start-up for hydroviscous drive applied to scraper conveyor. Math. Probl. Eng. 2019, 2019, 6131364. [Google Scholar] [CrossRef]
- Zhang, D.S.; Mao, J.; Liu, Z.S. Dynamics simulation and experiment on the starting and braking of scraper conveyor. Meitan Xuebao 2016, 41, 513–521. [Google Scholar]
- Wang, X.W.; Wang, S.P.; Long, R.S.; Yang, Z.J.; Liu, G.P. Rigid-flexible coupled dynamic contact analysis for a chains drive system of a heavy scraper conveyer during loading start-up. J. Vib. Shock. 2016, 35, 34–40. [Google Scholar]
- Xie, C.X.; Liu, Z.X.; Mao, J.; Xie, M.; Lu, J.N. Analysis of torsional vibration characteristics of scraper conveyor on chain blocked condition. Meitan Xuebao 2018, 43, 2348–2354. [Google Scholar]
- Jiang, S.B.; Huang, S.; Zeng, Q.L.; Wang, C.L.; Gao, K.D.; Zhang, Y.Q. Dynamic properties of chain drive system considering multiple impact factors. Int. J. Simul. Model. 2022, 21, 284–295. [Google Scholar] [CrossRef]
- Wang, D.G.; Zhang, J.; Zhu, Z.C.; Gang, S.; Xiang, L. Crack initiation characteristics of ring chain of heavy-duty scraper conveyor under time-varying loads. Adv. Mech. Eng. 2019, 11, 1687814019880366. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Li, W.; Zhu, Z.; Yang, S.; Jiang, F. Fault detection for the scraper chain based on vibration analysis using the adaptive optimal kernel time-frequency representation. Shock Vib. 2019, 2019, 6986240. [Google Scholar] [CrossRef]
- Zhao, S.F.; Wang, P.F.; Li, S.J. Study on the fault diagnosis method of scraper conveyor gear under time-varying load condition. Appl. Sci. 2020, 10, 5053. [Google Scholar] [CrossRef]
- Jiang, S.B.; Zhang, X.; Gao, K.D.; Wang, Q.Y.; Hidenori, K. Multi-body dynamics and vibration analysis of chain assembly in armoured face conveyor. Int. J. Simul. Model. 2017, 16, 458–470. [Google Scholar] [CrossRef]
- Ren, W.J.; Wang, L.; Mao, Q.H.; Jiang, S.B.; Huang, S. Coupling properties of chain drive system under various and eccentric loads. Int. J. Simul. Model. 2020, 19, 643–654. [Google Scholar] [CrossRef]
- Jiang, S.B.; Zeng, Q.L.; Wang, G.; Gao, K.D.; Hidenori, K. Contact analysis of chain drive in scraper conveyor based on dynamic meshing properties. Int. J. Simul. Model. 2018, 17, 81–91. [Google Scholar] [CrossRef]
- Shprekher, D.M.; Babokin, G.I.; Kolesnikov, E.B.; Ovsyannikov, D.S. Research of load unbalance of a two-motor variable frequency dtive for scraper conveyor. Izv. Vyss. Uchebnykh Zaved. Elektromekhanika 2021, 64, 37–45. [Google Scholar] [CrossRef]
- Shprekher, D.M.; Babokin, G.I.; Zelenkov, A.V.; Ovsyannikov, D.S. Universal computer model for studying the dynamics of a two-motor scraper conveyor. Izv. Vyss. Uchebnykh Zaved. Elektromekhanika 2021, 64, 56–64. [Google Scholar]
- Wojnar, G.; Burdzik, R.; Wieczorek, A.N.; Konieczny, L. Multidimensional data interpretation of vibration signals registered in different locations for system condition monitoring of a three-stage gear transmission operating under difficult conditions. Sensors 2021, 21, 7808. [Google Scholar] [CrossRef]
- Jiang, S.B.; Lv, R.B.; Wan, L.R.; Mao, Q.H.; Zeng, Q.L.; Gao, K.D.; Yang, Y. Dynamic characteristics of the chain drive system of scraper conveyor based on the speed difference. IEEE Access 2020, 8, 168650–168658. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Improved SGD320/17B | Technical Parameter |
|---|---|
| Rated power of motor (kW) | 18.5 |
| Speed of variable frequency motor (rpm) | 1470 |
| Working length of scraper (m) | 12 |
| Middle chute size (length × width × height, mm) | 600 × 320 × 156 |
| Rated chain speed (m/s) | 0.59 |
| Chain specification | Φ14 × 50 |
| Breaking force of ring chain (kN) | >250 |
| Transmission ratio of reducer | 24.95 |
| Working voltage (V) | 380 |
| Adjusting height of hydraulic jack (mm) | 85~350 |
| Maximum horizontal bending angle of scraper conveyor (°) | 3 |
| 1 | straight working condition |
| 2 | horizontal bending (3°) working condition |
| 3 | vertical bending (3°) working condition |
| 4 | horizontal bending + vertical bending working condition |
| Number | Standard Deviation | Root Mean Square | Skewness | Kurtosis |
|---|---|---|---|---|
| 1 | 54.99 | 63.9 | −1.87 | 10.42 |
| 2 | 53.08 | 54.99 | −1.25 | 5.67 |
| 3 | 56.45 | 63.59 | −1.28 | 6.74 |
| 4 | 50.29 | 53.96 | −1.67 | 11.77 |
| 5 | 54.4 | 60.98 | −2.03 | 9.89 |
| 6 | 55.36 | 58.62 | −2.16 | 11.6 |
| 7 | 49.4 | 53.08 | −2.36 | 16.49 |
| 8 | 51.55 | 55.05 | −1.79 | 10.13 |
| 9 | 54.19 | 59.23 | −1.95 | 9.17 |
| 10 | 53.38 | 57.82 | −1.69 | 7.01 |
| Stage | Gear Module | Helix Angle (°) | Number of Teeth of Driving Gear | Number of Teeth of Driven Gear | Gear Ratio |
|---|---|---|---|---|---|
| 1 | 5 | 33.75 | 14 | 36 | 2.57 |
| 2 | 5 | 10 | 13 | 44 | 3.38 |
| 3 | 6 | 0 | 15 | 43 | 2.87 |
| Chain Speed (m/s) | Motor Rotation Frequency (Rotation Frequency of Reducer Input Shaft) (Hz) | Meshing Frequency of Primary Gear (Hz) | Rotation Frequency of the Second Shaft (Hz) | Meshing Frequency of Secondary Gear (Hz) | Rotation Frequency of the Third Shaft (Hz) | Meshing Frequency of Third Gear (Hz) | Rotation Frequency of Output Shaft (Head Sprocket) (Hz) |
|---|---|---|---|---|---|---|---|
| 0.0236 | 0.98 | 13.72 | 0.3811 | 4.9544 | 0.1126 | 1.6890 | 0.0393 |
| 0.0471 | 1.96 | 27.44 | 0.7622 | 9.9089 | 0.2252 | 3.3780 | 0.0786 |
| 0.0707 | 2.94 | 41.16 | 1.1433 | 14.8633 | 0.3378 | 5.0670 | 0.1178 |
| 0.0943 | 3.92 | 54.88 | 1.5244 | 19.8178 | 0.4504 | 6.7561 | 0.1571 |
| 0.1178 | 4.9 | 68.6 | 1.9056 | 24.7722 | 0.5630 | 8.4451 | 0.1964 |
| 0.1414 | 5.88 | 82.32 | 2.2867 | 29.7267 | 0.6756 | 10.1341 | 0.2357 |
| 0.1650 | 6.86 | 96.04 | 2.6678 | 34.6811 | 0.7882 | 11.8231 | 0.2750 |
| 0.1885 | 7.84 | 109.76 | 3.0489 | 39.6356 | 0.9008 | 13.5121 | 0.3142 |
| 0.2121 | 8.82 | 123.48 | 3.4300 | 44.5900 | 1.0134 | 15.2011 | 0.3535 |
| 0.2357 | 9.8 | 137.2 | 3.8111 | 49.5444 | 1.1260 | 16.8902 | 0.3928 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, S.; Huang, S.; Mao, Q.; Zeng, Q.; Gao, K.; Lv, J. Dynamic Properties of Chain Drive in a Scraper Conveyor under Various Working Conditions. Machines 2022, 10, 579. https://doi.org/10.3390/machines10070579
Jiang S, Huang S, Mao Q, Zeng Q, Gao K, Lv J. Dynamic Properties of Chain Drive in a Scraper Conveyor under Various Working Conditions. Machines. 2022; 10(7):579. https://doi.org/10.3390/machines10070579
Chicago/Turabian StyleJiang, Shoubo, Shuan Huang, Qinghua Mao, Qingliang Zeng, Kuidong Gao, and Jinwang Lv. 2022. "Dynamic Properties of Chain Drive in a Scraper Conveyor under Various Working Conditions" Machines 10, no. 7: 579. https://doi.org/10.3390/machines10070579