
A Teleoperation Framework Based on Heterogeneous Matching for Hydraulic Manipulator

 ,
,
Abstract
:1. Introduction
2. Methods
2.1. Overview of the Teleoperation Framework with Heterogeneous Matching
2.2. Design of Each Sub-Frame for Hydraulic Manipulator Teleoperation
2.2.1. Master–Slave Workspace Mapping
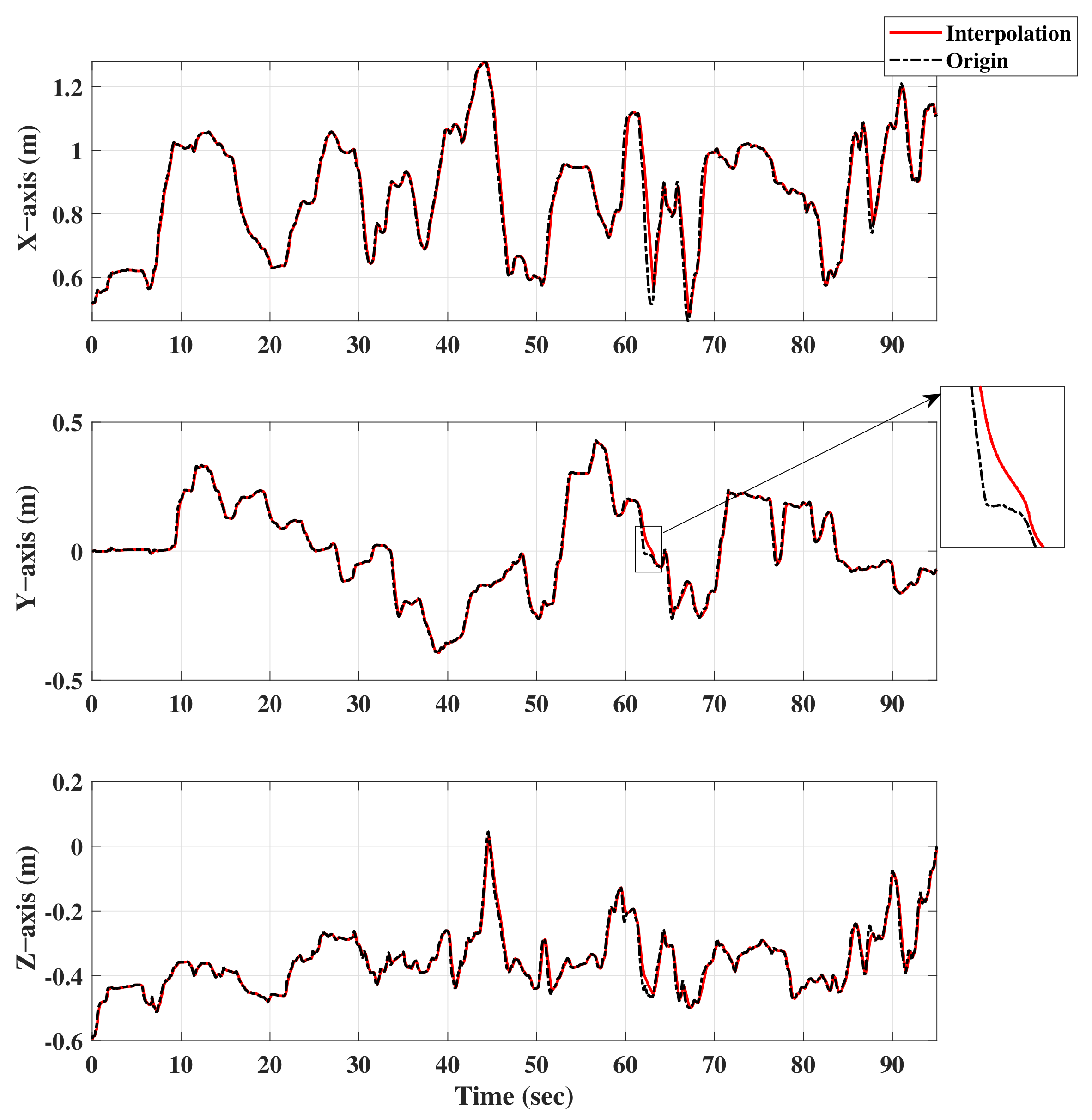
2.2.2. Velocity-Limited Interpolator
2.2.3. Inverse Kinematic Solver
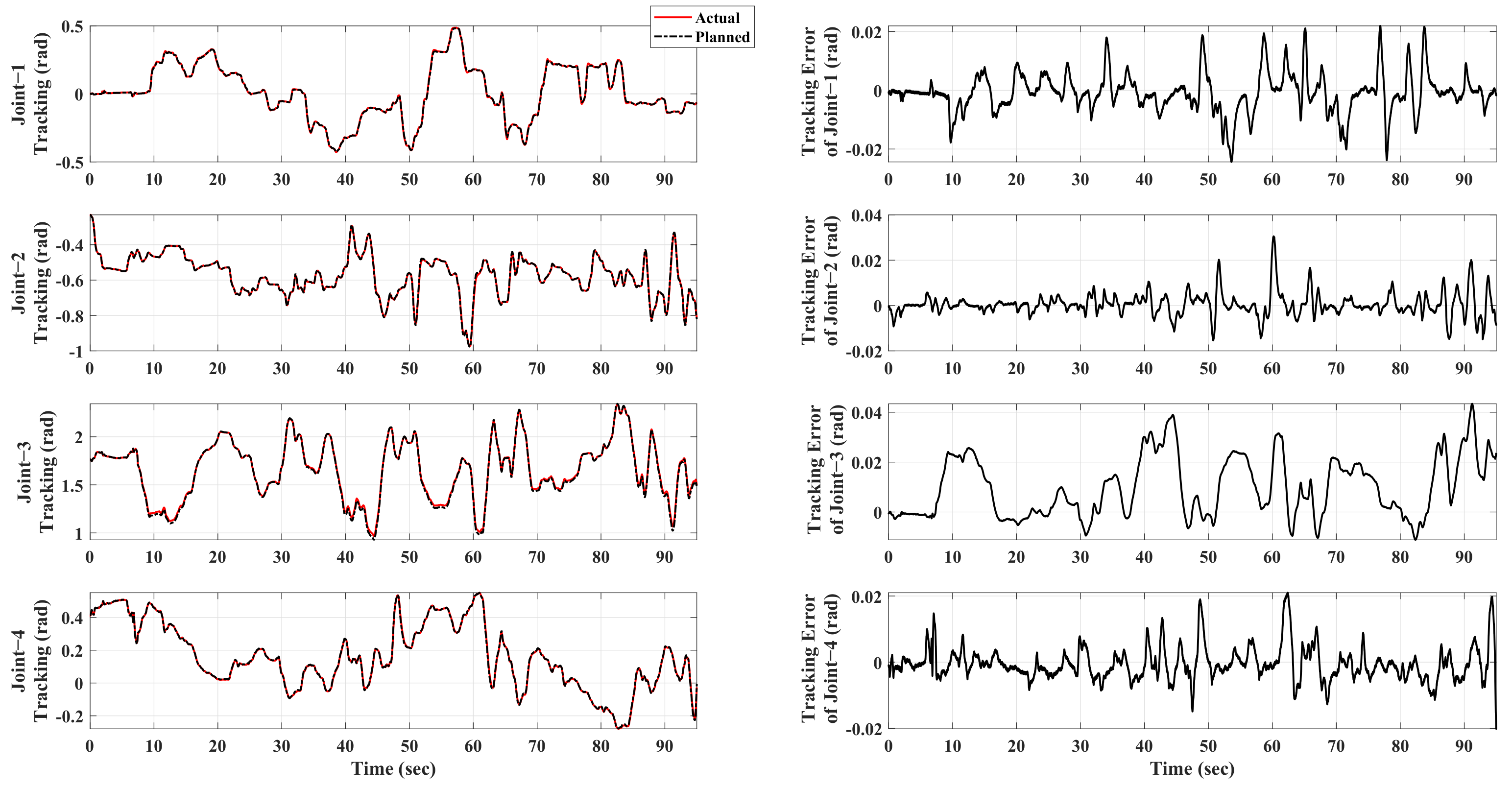
2.2.4. Slave Joint Trajectory Planner
2.2.5. Slave Manipulator Controller
2.2.6. Joint Feedback Torque Generator
3. Experiment
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Character | Meaning |
| Pose of master robot & slave hydraulic manipulator | |
| Rotation transformation matrix, scale transformation matrix, translation | |
| transformation matrix | |
| Rotation angle around the z-axis | |
| Discrete interpolation points on the slave side | |
| time interval | |
| Final end-pose of hydraulic manipulator | |
| Maximum velocity limitation | |
| Joint discrete point sequence | |
| Inverse kinematics conversion function | |
| segment of p-order B-spline base function | |
| n | Length of control point sequence of B-spline |
| control points of B-spline | |
| Time interval during trajectory planner | |
| x | Defined states in dynamic state space |
| Vector consisting of joint angles and velocity | |
| Inertia matrix, Coriolis/centrifugal matrix, Gravitational matrix | |
| D | Disturbance torque vector |
| Uncertain nonlinearities in hydraulic system | |
| Pressure vector in the oil inlet & return chambers of all joint hydraulic cylinders | |
| Effective area of joint hydraulic cylinder of the oil inlet & return chamber | |
| Volume of oil inlet & return chamber in hydraulic cylinder | |
| Flow disturbance of oil inlet & return chamber | |
| u | Final control input |
| Gain coefficients of inlet & return flow | |
| Inlet & return flow conversion function | |
| Model parameter | |
| Parameter regression matrix | |
| Motion tracking error | |
| Feedback control gain | |
| Visual input | |
| Virtual control law in Step I during backstepping controller design | |
| Virtual control law in Step II during the backstepping controller design | |
| Designed infinitesimal control parameter | |
| Proj | Model parameter adaptive law |
| Model parameter adaptive coefficient | |
| Joint feedback torque | |
| Joint repulsion torque generating function | |
| Artificial set maximum repulsion torque |
References
- Cheng, M.; Zhang, J.; Xu, B.; Ding, R.; Wei, J. Decoupling Compensation for Damping Improvement of the Electrohydraulic Control System With Multiple Actuators. IEEE/ASME Trans. Mechatron. 2018, 23, 1383–1392. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Tomizuka, M. High-gain-observer-based integral sliding mode control for position tracking of electrohydraulic servo systems. IEEE/ASME Trans. Mechatron. 2017, 22, 2695–2704. [Google Scholar] [CrossRef]
- Lin, T.; Lin, Y.; Ren, H.; Chen, H.; Chen, Q. A Double Variable Control Load Sensing System for Electric Hydraulic Excavator. Energy 2021, 223, 119999. [Google Scholar] [CrossRef]
- Correa, M.; Cárdenas, D.; Carvajal, D.; Ruiz-del Solar, J. Haptic Teleoperation of Impact Hammers in Underground Mining. Appl. Sci. 2022, 12, 1428. [Google Scholar] [CrossRef]
- Perez-del Pulgar, C.J.; Smisek, J.; Rivas-Blanco, I.; Schiele, A.; Muñoz, V.F. Using Gaussian Mixture Models for Gesture Recognition During Haptically Guided Telemanipulation. Electronics 2019, 8, 772. [Google Scholar] [CrossRef] [Green Version]
- Ye, Y.; Pan, Y.J.; Hilliard, T. Bilateral teleoperation with time-varying delay: A communication channel passification approach. IEEE/ASME Trans. Mechatron. 2013, 18, 1431–1434. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, F.; Yang, C.; Yao, B. Adaptive fuzzy backstepping control for stable nonlinear bilateral teleoperation manipulators with enhanced transparency performance. IEEE Trans. Ind. Electron. 2019, 67, 746–756. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, F.; Sun, W.; Gu, J.; Yao, B. RBF-neural-network-based adaptive robust control for nonlinear bilateral teleoperation manipulators with uncertainty and time delay. IEEE/ASME Trans. Mechatron. 2019, 25, 906–918. [Google Scholar] [CrossRef]
- Lampinen, S.; Koivumäki, J.; Mattila, J. Full-dynamics-based bilateral teleoperation of hydraulic robotic manipulators. In Proceedings of the 2018 IEEE 14th International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 1343–1350. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Advanced valves and pump coordinated hydraulic control design to simultaneously achieve high accuracy and high efficiency. IEEE Trans. Control Syst. Technol. 2020, 29, 236–248. [Google Scholar] [CrossRef]
- Hyon, S.H.; Suewaka, D.; Torii, Y.; Oku, N. Design and experimental evaluation of a fast torque-controlled hydraulic humanoid robot. IEEE/ASME Trans. Mechatron. 2016, 22, 623–634. [Google Scholar] [CrossRef]
- Ge, L.; Quan, L.; Zhang, X.; Zhao, B.; Yang, J. Efficiency improvement and evaluation of electric hydraulic excavator with speed and displacement variable pump. Energy Convers. Manag. 2017, 150, 62–71. [Google Scholar] [CrossRef]
- Bu, F.; Yuo, B. Desired compensation adaptive robust control of single-rod electro-hydraulic actuator. In Proceedings of the 2001 American Control Conference (Cat. No. 01CH37148), Arlington, VA, USA, 25–27 June 2001; Volume 5, pp. 3926–3931. [Google Scholar] [CrossRef]
- Helian, B.; Chen, Z.; Yao, B.; Lyu, L.; Li, C. Accurate motion control of a direct-drive hydraulic system with an adaptive nonlinear pump flow compensation. IEEE/ASME Trans. Mechatron. 2020, 26, 2593–2603. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Development of pump and valves combined hydraulic system for both high tracking precision and high energy efficiency. IEEE Trans. Ind. Electron. 2018, 66, 7189–7198. [Google Scholar] [CrossRef]
- Zhou, S.; Shen, C.; Xia, Y.; Chen, Z.; Zhu, S. Adaptive robust control design for underwater multi-dof hydraulic manipulator. Ocean Eng. 2022, 248, 110822. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W.; Jiao, Z. RISE-Based Adaptive Control of Hydraulic Systems With Asymptotic Tracking. IEEE Trans. Autom. Sci. Eng. 2015, 14, 1524–1531. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Asymptotic tracking control of mechanical servosystems with mismatched uncertainties. IEEE/ASME Trans. Mechatron. 2020, 26, 2204–2214. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W. Active Disturbance Rejection Adaptive Control of Hydraulic Servo Systems. IEEE Trans. Ind. Electron. 2017, 64, 8023–8032. [Google Scholar] [CrossRef]
- Petrović, G.R.; Mattila, J. Mathematical modelling and virtual decomposition control of heavy-duty parallel–serial hydraulic manipulators. Mech. Mach. Theory 2022, 170, 104680. [Google Scholar] [CrossRef]
- Mattila, J.; Koivumäki, J.; Caldwell, D.G.; Semini, C. A survey on control of hydraulic robotic manipulators with projection to future trends. IEEE/ASME Trans. Mechatron. 2017, 22, 669–680. [Google Scholar] [CrossRef]
- Koivumäki, J.; Mattila, J. Stability-guaranteed impedance control of hydraulic robotic manipulators. IEEE/ASME Trans. Mechatron. 2016, 22, 601–612. [Google Scholar] [CrossRef]
- Shen, W.; Wang, J. An integral terminal sliding mode control scheme for speed control system using a double-variable hydraulic transformer. ISA Trans. 2019, 124, 386–394. [Google Scholar] [CrossRef]
- Shtessel, Y.; Taleb, M.; Plestan, F. A novel adaptive-gain supertwisting sliding mode controller: Methodology and application. Automatica 2012, 48, 759–769. [Google Scholar] [CrossRef]
- Chen, Z.; Yan, S.; Yuan, M.; Yao, B.; Hu, J. Modular development of master–slave asymmetric teleoperation systems with a novel workspace mapping algorithm. IEEE Access 2018, 6, 15356–15364. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, F.; Chen, W.; Zhang, J.; Sun, W.; Chen, J.; Gu, J.; Zhu, S. RBFNN-based adaptive sliding mode control design for delayed nonlinear multilateral telerobotic system with cooperative manipulation. IEEE Trans. Ind. Inform. 2019, 16, 1236–1247. [Google Scholar] [CrossRef]
- Deng, H.; Gong, D.; Yu, J.; Zuo, G. Research on Intuitive Tele-operation Motion Mapping Algorithm for Omnidirectional Mobile Heterogeneous Slave Arm System. In Proceedings of the 2020 10th Institute of Electrical and Electronics Engineers International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Xi’an, China, 10–13 October 2020; pp. 67–72. [Google Scholar] [CrossRef]
- Egota, S.B.; Aneli, N.; Lorencin, I.; Saga, M.; Car, Z. Path planning optimization of six-degree-of-freedom robotic manipulators using evolutionary algorithms. Int. J. Adv. Robot. Syst. 2020, 17, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Bozek, P.; Lozkin, A.; Gorbushin, A. Geometrical Method for Increasing Precision of Machine Building Parts. Procedia Eng. 2016, 149, 576–580. [Google Scholar] [CrossRef] [Green Version]
- Yao, B.; Bu, F.; Reedy, J.; Chiu, G. Adaptive robust motion control of single-rod hydraulic actuators: Theory and experiments. IEEE/ASME Trans. Mechatron. 2002, 5, 79–91. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parameters of Phantom Omini | Value | Structural Parameters of Slave Manipulator | Value |
|---|---|---|---|
| 3.5 cm | 23.0 cm | ||
| 15.2 cm | 26.0 cm | ||
| 13.8 cm | 24.5 cm | ||
| Range of | 19.5 cm | ||
| Range of | Range of | ||
| Range of | Range of | ||
| Range of | Range of | ||
| Range of | Range of | ||
| Range of | ∖ | ∖ | |
| Three-axis workspace range | (cm) | Three-axis workspace range | (cm) |
| Maximum Planning Error | Maximum Control Error | |
|---|---|---|
| Joint-1 | 0.01 rad | 0.02 rad |
| Joint-2 | 0.03 rad | 0.03 rad |
| Joint-3 | 0.01 rad | 0.04 rad |
| Joint-4 | 0.02 rad | 0.02 rad |
| x-axis | 2.17 cm | 1.06 cm |
| y-axis | 2.20 cm | 2.03 cm |
| z-axis | 1.91 cm | 1.85 cm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Shen, C.; Zhu, S.; Li, W.; Nie, Y.; Chen, Z. A Teleoperation Framework Based on Heterogeneous Matching for Hydraulic Manipulator. Machines 2022, 10, 536. https://doi.org/10.3390/machines10070536
Zhou S, Shen C, Zhu S, Li W, Nie Y, Chen Z. A Teleoperation Framework Based on Heterogeneous Matching for Hydraulic Manipulator. Machines. 2022; 10(7):536. https://doi.org/10.3390/machines10070536
Chicago/Turabian StyleZhou, Shizhao, Chong Shen, Shiqiang Zhu, Wenwen Li, Yong Nie, and Zheng Chen. 2022. "A Teleoperation Framework Based on Heterogeneous Matching for Hydraulic Manipulator" Machines 10, no. 7: 536. https://doi.org/10.3390/machines10070536