
An Object Detection Model for Paint Surface Detection Based on Improved YOLOv3

 ,
,
Abstract
:1. Introduction
2. Principle of the YOLOv3 Algorithm
2.1. Detection Principle
2.2. Loss Function
3. Improvement of YOLOv3 Algorithm
3.1. Improvement of Network Structure
3.2. Improvement of Bounding Box Loss Function
3.3. Improvement of Clustering Algorithm
| Algorithm 1 K-means|| |
| Input: DATA X; clusters K; oversampling l. |
| Output: set of prototypes C = {c1,c2,…,ck}. |
| 1. Uniformly and randomly select a sample from X as a candidate cluster center C. |
| 2. compute |
| 3. for times do |
| 4. sample each point independently with probability |
| 5. C |
| 6. end for |
| 7. Run the weighted K-means++ algorithm on the set of candidate centers to get the exact K cluster centers. |
| 8. Run the standard K-means algorithm with the resulting K cluster centers. |
4. Experiment and Result Analysis
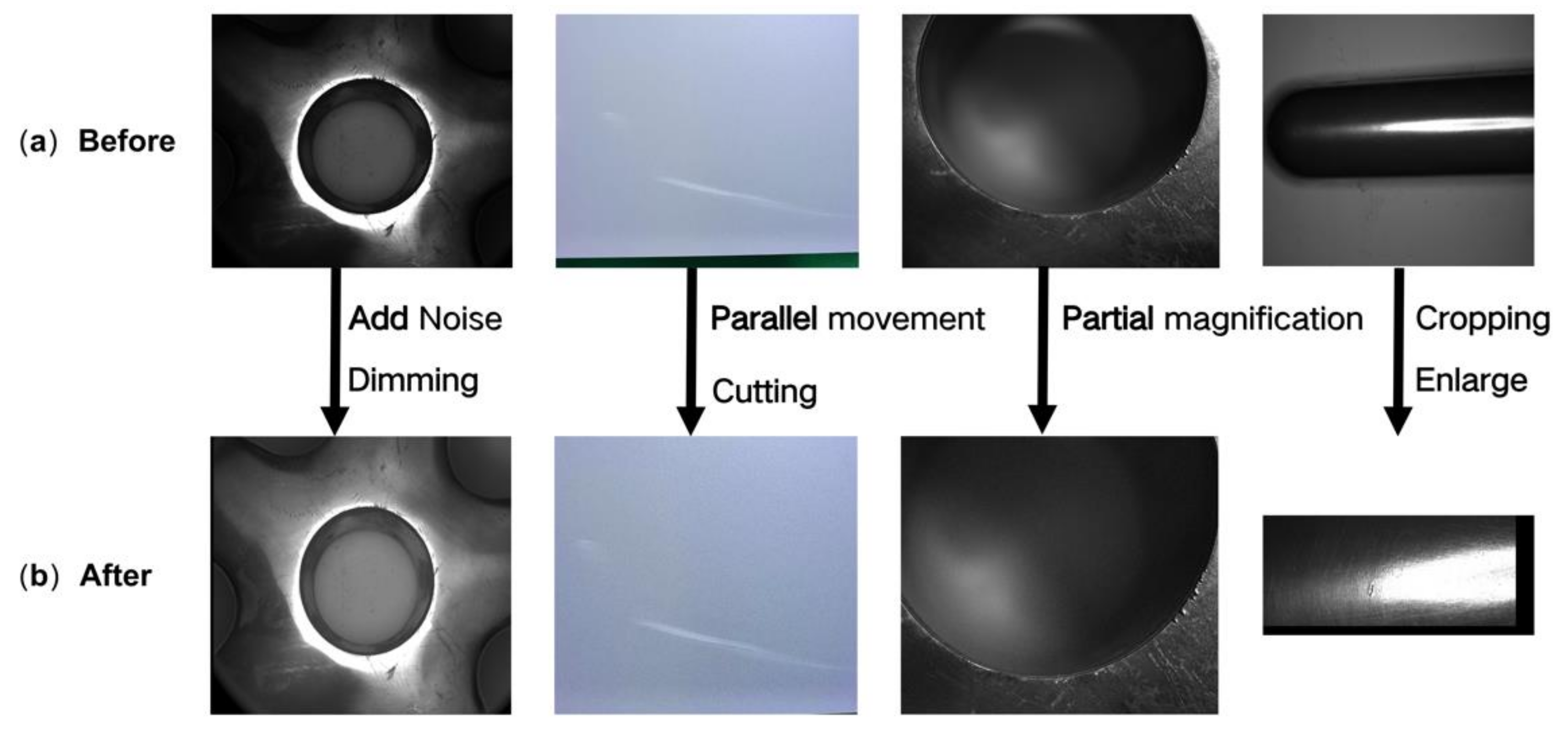
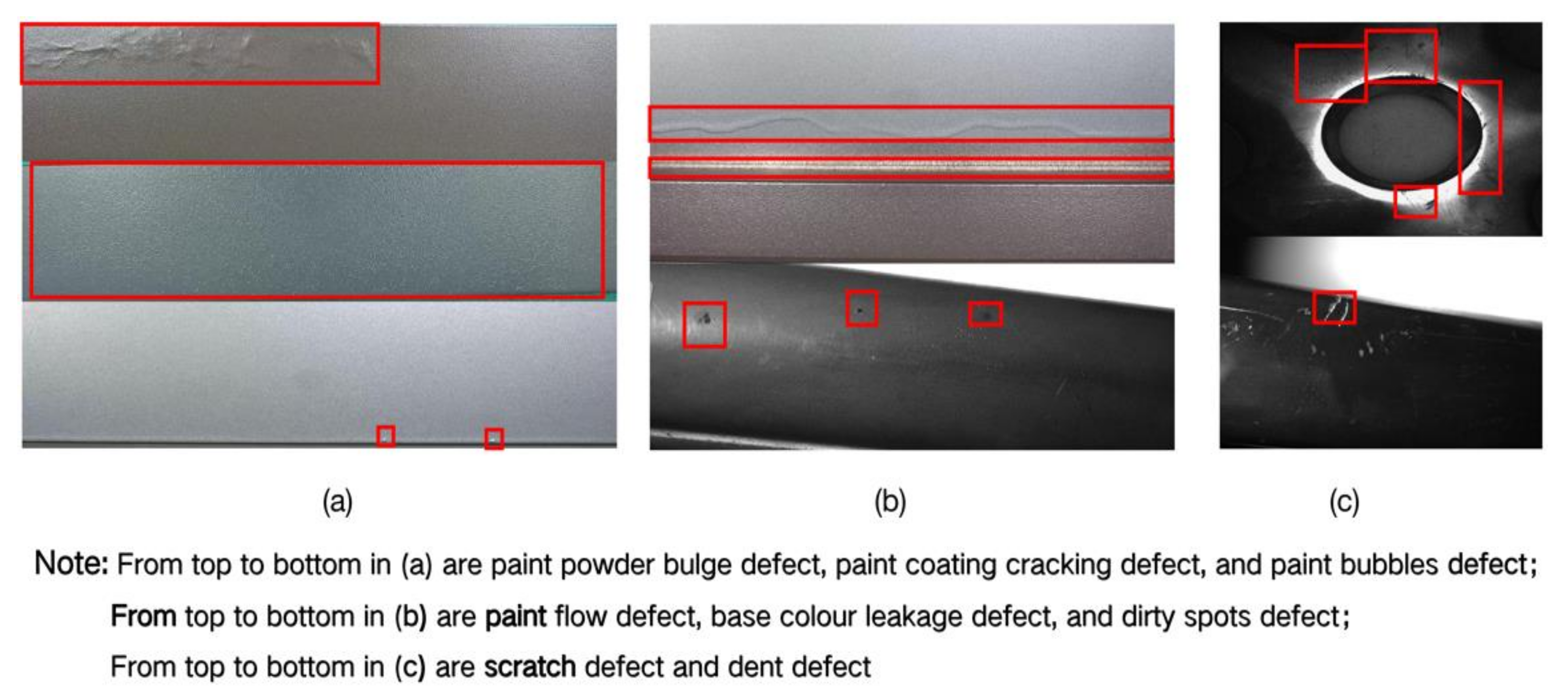
4.1. Experimental Dataset
| Algorithm 2 Image cropping |
| Input: W and H are the width and height of the input image. and are the bounding box information in the input XML file. |
| Output: new image, new XML file. |
| 1. |
| 2. ) |
| 3. |
| 4. |
| 5. |
| 6. |
| 7. |
| 8. |
| 9. |
| 10. |
| 11. crop_img |
| 12. crop_bboxes |
| Algorithm 3 Image cropping |
| Input: W and H are the width and height of the input image. are the bounding box information in the input XML file. |
| Output: new image, new XML file. |
| 1. |
| 2. |
| 3. |
| 4. |
| 5. |
| 6. |
| 7. |
| 8. |
| 9. |
| 10. shift_img |
| 11. shift_bboxes |
4.2. Evaluation Indicators
4.3. Analysis of Experimental Results
- Improve the Network Structure and Clustering Algorithm
- 2.
- Comparative Analysis of the Performance of Different Loss Functions
- 3.
- Comparative Analysis of the Performance of Different Algorithms
- 4.
- Comparative Analysis of Different Types of Defect Detection Performance
- 5.
- Comparative Analysis of Algorithm Performance Based on Public Datasets
5. Discussion and Conclusions
- The new anchor boxes are obtained by K-means|| algorithm clustering, which increases the mAP value by 5.8%.
- By optimizing and improving the network structure of the YOLOv3 algorithm, a new detection scale is added to improve its detection ability for small target defect samples, and the CIOU loss function is used to improve the positioning accuracy. The mAP value is increased by 5.8% compared with the original algorithm.
- On the self-made five-star feet paint surface data set, the mAP value of 8 types of paint surface defect detection reached 88.3%, and the detection speed was also maintained at 50fps. Further verification was carried out on the aluminum data set released by the Aliyun Tianchi Competition. The mAP value of the improved YOLOv3 algorithm in this paper reached 89.2%, and the detection speed could be maintained at 50 fps.
- Through comparative experiments with other algorithms, the improved YOLOv3 algorithm has faster detection speed and better detection accuracy for small target defect detection.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, C.; Liu, M.-Y.; Tuzel, O.; Xiao, J. R-CNN for small object detection. In Proceedings of the Asian Conference on Computer Vision, Taipei, Taiwan, 20–24 November 2016; pp. 214–230. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Washington, DC, USA, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Transactions on Pattern Analysis & Machine Intelligence. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Liu, M.; Zheng, P.; Yang, H.; Zou, J. A smart surface inspection system using faster R-CNN in cloud-edge computing environment. Adv. Eng. Inform. 2020, 43, 101037. [Google Scholar] [CrossRef]
- Tian, Z.; Shen, C.; Chen, H.; He, T. Fcos: Fully convolutional one-stage object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 9627–9636. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Zhai, S.; Shang, D.; Wang, S.; Dong, S. DF-SSD: An improved SSD object detection algorithm based on DenseNet and feature fusion. IEEE Access 2020, 8, 24344–24357. [Google Scholar] [CrossRef]
- Qing, Y.; Liu, W.; Feng, L.; Gao, W. Improved Yolo network for free-angle remote sensing target detection. Remote Sens. 2021, 13, 2171. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Cheng, L.; Li, J.; Duan, P.; Wang, M. A small attentional YOLO model for landslide detection from satellite remote sensing images. Landslides 2021, 18, 2751–2765. [Google Scholar] [CrossRef]
- Liu, C.; Wu, Y.; Liu, J.; Sun, Z. Improved YOLOv3 Network for Insulator Detection in Aerial Images with Diverse Background Interference. Electronics 2021, 10, 771. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Tian, Y.; Yang, G.; Wang, Z.; Li, E.; Liang, Z. Detection of apple lesions in orchards based on deep learning methods of cyclegan and yolov3-dense. J. Sens. 2019, 2019, 7630926. [Google Scholar] [CrossRef]
- Xianbao, C.; Guihua, Q.; Yu, J.; Zhaomin, Z. An improved small object detection method based on Yolo V3. Pattern Anal. Appl. 2021, 24, 1347–1355. [Google Scholar] [CrossRef]
- Zhao, L.; Li, S. Object detection algorithm based on improved YOLOv3. Electronics 2020, 9, 537. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Zhang, W. Face mask wearing detection algorithm based on improved YOLO-v4. Sensors 2021, 21, 3263. [Google Scholar] [CrossRef] [PubMed]
- Roy, A.M.; Bhaduri, J. Real-time growth stage detection model for high degree of occultation using DenseNet-fused YOLOv4. Comput. Electron. Agric. 2022, 193, 106694. [Google Scholar] [CrossRef]
- Roy, A.M.; Bose, R.; Bhaduri, J. A fast accurate fine-grain object detection model based on YOLOv4 deep neural network. Neural Comput. Appl. 2022, 1–27. [Google Scholar] [CrossRef]
- Nepal, U.; Eslamiat, H. Comparing YOLOv3, YOLOv4 and YOLOv5 for Autonomous Landing Spot Detection in Faulty UAVs. Sensors 2022, 22, 464. [Google Scholar] [CrossRef]
- Jiang, X.; Gao, T.; Zhu, Z.; Zhao, Y. Real-time face mask detection method based on YOLOv3. Electronics 2021, 10, 837. [Google Scholar] [CrossRef]
- Rani, E. LittleYOLO-SPP: A delicate real-time vehicle detection algorithm. Optik 2021, 225, 165818. [Google Scholar]
- Zhang, X.; Huang, D. Defect detection on aluminum surfaces based on deep learning. J. East China Norm. Univ. (Nat. Sci.) 2020, 2020, 105. [Google Scholar]
- Li, W.; Ye, X.; Zhao, Y.; Wang, W. Strip Steel Surface Defect Detection Based on Improved YOLOv3 Algorithm. Acta Electron. Sin. 2020, 48, 1284–1292. [Google Scholar]
- Xu, L.; Huang, H.; Ding, W.; Fan, Y. Detection of small fruit target based on improved DenseNet. J. Zhejiang Univ. (Eng. Sci.) 2021, 55, 377–385. [Google Scholar]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–16 June 2019. [Google Scholar]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU loss: Faster and better learning for bounding box regression. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 12993–13000. [Google Scholar]
- Bahmani, B.; Moseley, B.; Vattani, A.; Kumar, R.; Vassilvitskii, S. Scalable k-means++. arXiv 2012, arXiv:1203.6402 2012. [Google Scholar] [CrossRef]
- Hämäläinen, J.; Kärkkäinen, T.; Rossi, T. Improving scalable K-means++. Algorithms 2021, 14, 6. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Map | Receptive Field | A Priori Box Size |
|---|---|---|
| 13 × 13 | Big | (116 × 90), (156 × 198), (373 × 326) |
| 26 × 26 | Middle | (30 × 61), (62 × 45), (59 × 119) |
| 52 × 52 | Small | (10 × 13), (16 × 30), (33 × 23) |
| Network Structure | Clustering Algorithm | fps | mAP@.50 (%) |
|---|---|---|---|
| Original YOLOv3 | K-means | 55 | 82.5 |
| Original YOLOv3 | K-means|| | 55 | 84.2 |
| Proposed model | K-means | 50 | 86.7 |
| Proposed model | K-means++ | 50 | 87 |
| Proposed model | K-means|| | 50 | 88.3 |
| Algorithm | fps | mAP@.50 (%) |
|---|---|---|
| Faster R-CNN | 12 | 79.6 |
| SSD | 51 | 81.3 |
| YOLOv3 | 55 | 82.5 |
| Proposed model | 50 | 88.3 |
| Algorithm | Data Set | fps | mAP @.50 (%) |
|---|---|---|---|
| Improved YOLOv3 [24] | Aliyun Tianchi | 51 | 87.1 |
| Proposed model | Aliyun Tianchi | 50 | 89.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Su, S.; Wang, W.; Chu, C.; Jiang, L.; Ji, Y. An Object Detection Model for Paint Surface Detection Based on Improved YOLOv3. Machines 2022, 10, 261. https://doi.org/10.3390/machines10040261
Wang J, Su S, Wang W, Chu C, Jiang L, Ji Y. An Object Detection Model for Paint Surface Detection Based on Improved YOLOv3. Machines. 2022; 10(4):261. https://doi.org/10.3390/machines10040261
Chicago/Turabian StyleWang, Jiadong, Shaohui Su, Wanqiang Wang, Changyong Chu, Linbei Jiang, and Yangjian Ji. 2022. "An Object Detection Model for Paint Surface Detection Based on Improved YOLOv3" Machines 10, no. 4: 261. https://doi.org/10.3390/machines10040261