The main source of motor noise vibration harshness problem for permanent magnet synchronous motor is vibration and noise, and the main source of vibration and noise is the electromagnetic force. The electromagnetic force is divided into radial electromagnetic force and tangential electromagnetic force. The radial electromagnetic force is the source of vibration and noise, and the tangential force is the source of torque ripple. The main parameters of radial electromagnetic force are the order, frequency, and amplitude of force wave F
u [
14,
15].
3.1. Analysis of No-Load Radial Force
The expression of no-load air gap flux density of PMSM without considering the influence of reluctance and saturation is as follows:
where
b(θ,t) is the air gap flux density,
f(θ,t) is the magnetomotive force,
λ(θ,t) is the air gap magnetic conductance,
ω1 is the fundamental angular velocity,
Fu is the maximum magnetomotive force of
u harmonic,
u_0 is the harmonic order,
p is the pole pairs, Λ
0 is the air-gap fundamental magnetic conductance, Λ
k is the air-gap harmonic magnetic conductance, and
Z1 is slot number.
When the tangential flux density is neglected, the radial force density is
where
μ0 is the vacuum conductance. It can be obtained by substituting (1–3) into (4) as follows:
By decomposing the above formula, we can obtain
This calculation formula is the DC component of electromagnetic force wave, which does not change with time. The static deformation of the iron core will not cause motor vibration.
The above formula defined the radial force wave produced by the interaction of rotor magnetic field and harmonic wave.
The above formula defines the radial force wave produced by the interaction of tooth harmonic magnetic field and harmonic wave.
This calculation formula is the radial force wave generated by the interaction of different harmonics in the rotor magnetic field.
Here,
Bu1 and
Bu2 is the flux density of different harmonics rotor magnetic field;
u1 and
u2 is the harmonic order.
This calculation formula is the radial force wave generated by the interaction of different harmonics in the tooth harmonic magnetic field.
The above formula defines the radial force wave generated by the interaction of rotor magnetic field and tooth harmonic magnetic field.
3.2. Analysis of Load Radial Force
When the load is applied, a three-phase symmetrical current is applied to the three-phase winding as follows:
where
υ is the harmonic number of armature winding magnetic field, considering only integer slot
The load radial force formula is:
μEquation (14) is expanded as follows:
By decomposing Equation (15), we can obtain
where
Bv1 and
Bv2 are the flux density of different harmonics stator magnetic fields;
v1 and
v2 are the harmonic order; nu_1 and nu_2 are the variables of the sums.
This calculation formula is the electromagnetic force, which does not change with time and can only make the motor produce static deformation.
The above formula indicates the electromagnetic force wave produced by the interaction of armature magnetic field and harmonic wave.
This calculation formula defines the radial electromagnetic force wave generated by the interaction of different harmonics of armature magnetic field.
This formula is used to calculate the radial force wave generated by the interaction between the harmonic of the main pole magnetic field and the harmonic of the armature magnetic field.
The above calculation formula defines the radial force wave generated by the interaction of additional magnetic fields and armature harmonic magnetic fields.
Based on the above formulae, the number and frequency of force waves generated by permanent magnetic and armature magnetic fields are shown in
Table 2. From this table, we can infer how permanent magnetic and armature magnetic fields interact with each other to form the order and frequency of electromagnetic waves.
In addition to the radial electromagnetic force waves generated by permanent magnetic and armature magnetic fields, the frequency of the radial electromagnetic force waves generated by the interaction between permanent magnetic and armature magnetic fields are shown in
Table 3. From this table, we can derive the number of electromagnetic force waves and corresponding force-wave frequency when the stator and rotor magnetic fields are coupled, and the cogging effect is considered, which can reflect the electromagnetic force state of the motor during operation.
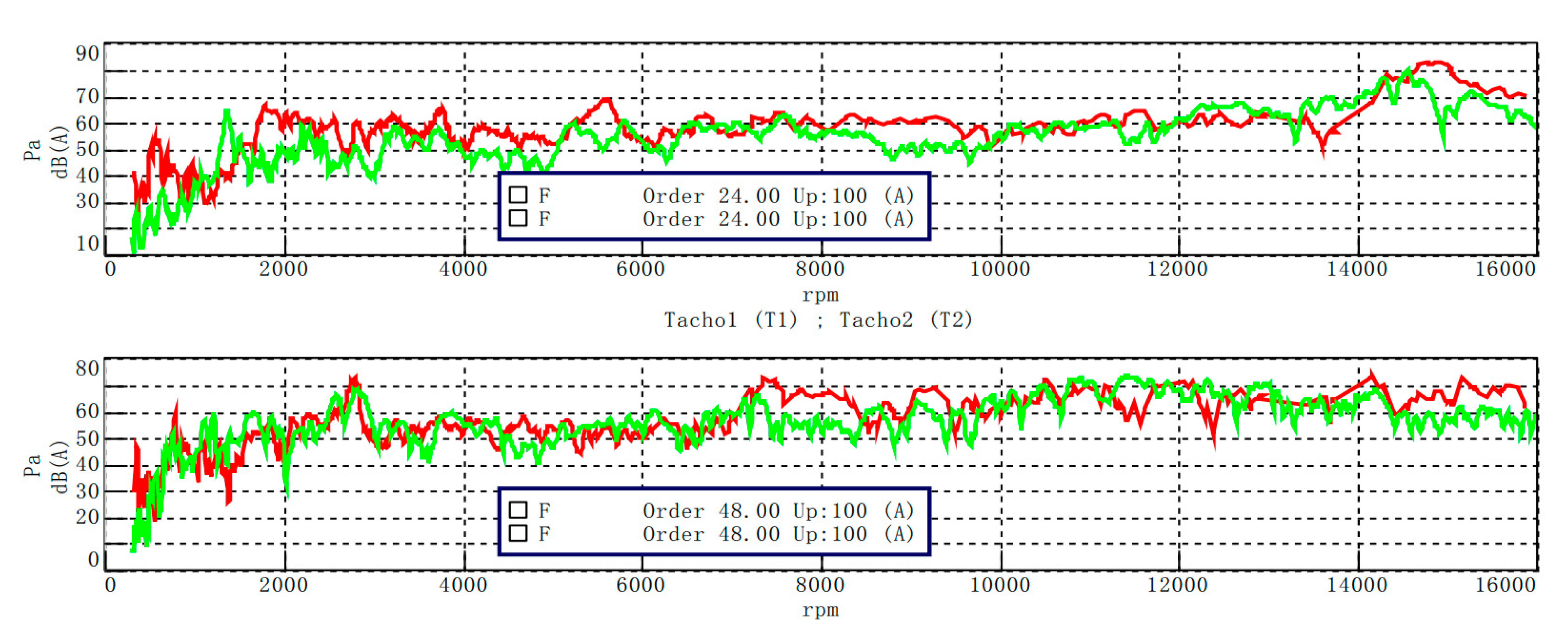
Table 4 shows the number of electromagnetic force waves generated by the main harmonics of a 48-slot, 8-pole motor. At present, problems with noise vibration harshness in vehicle motors are mainly in the orders of 24, 48, and 96 [
16], and the minimum number of nonzero force waves of a 48-slot, 8-pole motor is 8, which does not contribute to the abnormal noise vibration harshness of the motor.
From the above table, it is evident that, in actual engineering applications, the sources of 24-order abnormal noise are the 5th and 7th harmonics of stator magnetic field and rotor magnetic field, while the sources of 48-order abnormal noise are the 11th and 13th harmonics.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}