1. Introduction
EAP material, as an emerging material for actuators, has good deformation retention, simple structure, light weight, low price, and easy processing and manufacturing, and is more suitable for flexible actuators than piezoelectric ceramics with high brittleness and low strain and shape memory metals with unpredictable deformation and slow response [
1,
2].
Table 1 shows the comparison of EAP materials with conventional materials in terms of drive performance. EAP materials offer good actuation performance without the need for rigid frames, and they also have good prospects for application in the field of bionic artificial muscles [
3,
4].
EAP materials can be divided into electronic and ionic types according to the transduction mechanism [
5]. The induced strain of both electronic EAP and ionic EAP can be designed as bending, tensile, or compressive strain [
6]. Electronic EAP is favored by researchers for its mechanical properties comparable to biological muscles, fast response, and good flexibility, as shown in
Table 2, which compares the performance advantages and disadvantages of ionic and electronic EAP materials [
7,
8]. Researchers have carried out a lot of research on dielectric EAP materials. In 1998, Pelrine of SRI (Stanford Research Institute) proposed that the electrostatic pressure under the electric field exists only at the junction of the film surface and the electrode region, and the mechanical properties of the film have no direct effect on the electric field, and its deformation is only the passive mechanical behavior of the elastomer under the action of the electrostatic pressure [
9]. In 2001, Kofod performed uniaxial tensile tests on VHB 4910 films to determine the range of applicability of different hyperelastic models [
10]. Suo established the free energy function consisting of strain energy and electric field energy from the energy perspective, and gave the preliminary intrinsic relationship of its dielectric deformation under the force–electric field by variational treatment of the free energy of the adiabatic system. The significant feature of this method is that it is valid for both elastic or inelastic dielectrics [
11]. Pelrine et al. proposed an equation to calculate the electrostatic force in a dielectric elastomer system by using a flexible electrode as the driving means of polymer dielectric electrostriction, and proposed a new physical explanation of the electrostatic force acting on the dielectric elastomer film. Its contribution comes from in-plane and out-of-plane stresses [
12]. In recent years, due to the large voltage demand that hinders the application of EAP in many fields, people have begun to research the field of enhancing the driving ability of EAP materials. Hossain realized the driving enhancement in EAP by introducing high dielectric fillers into the matrix material in the uncured stage. They presented a phenomenologically inspired large strain framework for simulating the curing process of particle-filled electro-active polymers with a dispersion-type anisotropy that can work under the influence of an electromechanically coupled load [
13]. Sharma 3D-printed EAPs with polyvinylidene fluoride as the matrix and barium titanate and graphene as the reinforcements. The factors affecting the mechanical properties of the finished product were explored [
14]. Kanan considered the material modeling and corresponding finite element implementation of electromechanical coupling in fiber-reinforced electroactive polymers, and proposed a constitutive model that considers both the electroviscoelastic behavior of the isotropic matrix and the influence of unidirectional fiber on the hyperelastic response and viscous behavior of the entire composite. Studies have shown that for soft EAP simulations with relatively rigid fibers, the use of mixed finite elements improves convergence behavior [
15]. In addition to the nature of EAP materials, flexible electrodes also have an important impact on the life and efficiency of EAP materials. Mehnert used experimental data and modeling methods to explore the effect of flexible electrodes on the viscoelastic behavior of EAPs materials [
16]. Munteanu analyzed the application potential of mixed conductive paint pigments composed of zinc ferrite and polyaniline as electroactive and anticorrosion coatings from the electrorheological perspective [
17].
There are many types of EAP actuators, such as rhombic, cylindrical, conical, butterfly, etc. Although the motion forms of different structure types of actuators are different, they have the same actuation mechanism, in which the dielectric elastomer is deformed under the excitation of electric field to output displacement and force [
18,
19,
20]. As early as the late 1990s, Pelrine et al. designed and fabricated various forms of dielectric EAP actuators in the laboratory through the study of dielectric elastomers, which paved the way for the continued development of drive units [
21]. In 2007, a folding actuator was developed by a research group at the University of Pisa, Italy. The folded actuator can be deformed under the energized condition and the strain can be stabilized up to 10% [
22]. P. Lochmatter et al. from the Swiss Federal Institute of Technology designed and fabricated a dielectric EAP driver with a shell structure. When energized, the driving unit deforms under the action of Maxwell stress, and deflects in two directions of single degree of freedom of the shell structure through the tension of the dielectric EAP films on both sides [
23]. In 2020, Wang Yong of the Harbin Institute of Technology designed a new flexible bionic machine fish based on the principle of dielectric EAP materials in combination with a complex underwater environment, and gave a detailed description of its structure and design process [
24]. In addition to the structural design of the EAP driver, the problems of precise control, modeling, and calculation of the driver have also been partially solved. Considering the actual working conditions of EAP-based actuators under different input control voltages and external mechanical loads, Jiang developed a feedforward compensation scheme to dynamically eliminate the creep phenomenon that significantly reduces creep caused by changes in input control voltage and load [
25]. Because EAP actuators are usually designed as shell structures, in this case, the application of standard finite element formulas will lead to various locking pathology. Bishara developed a numerical scheme to simulate the viscoelastic response of electroactive polymers under finite deformation using a simplified mixed finite element scheme. It eliminates possible volume locking in electroactive polymers and improves computational efficiency while avoiding static condensation. Subsequently, Bishara proposed an advanced low-order solid shell model to simulate electroactive polymers, and modified the strain measure by assuming natural inhomogeneous strain and enhanced assumed strain. It alleviates various locking diseases [
26,
27].
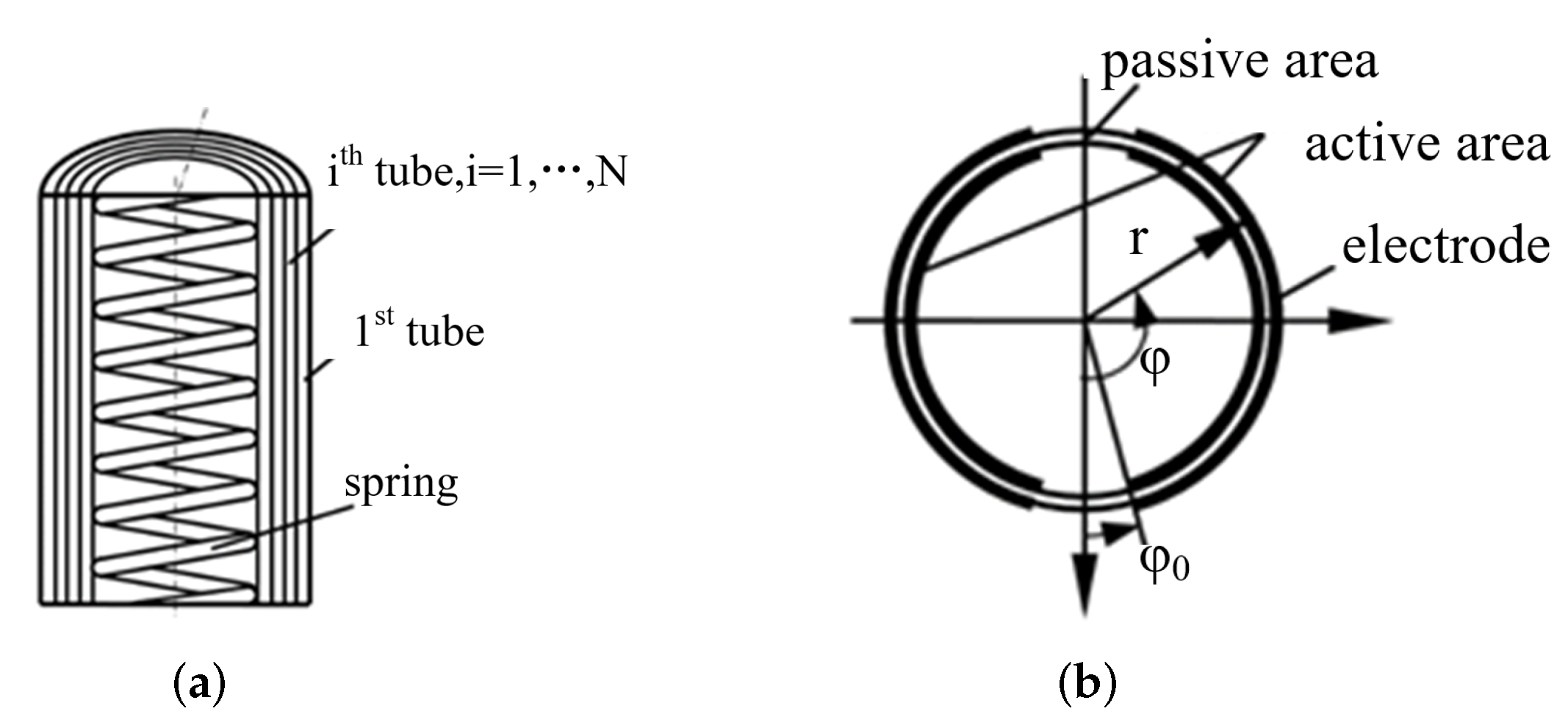
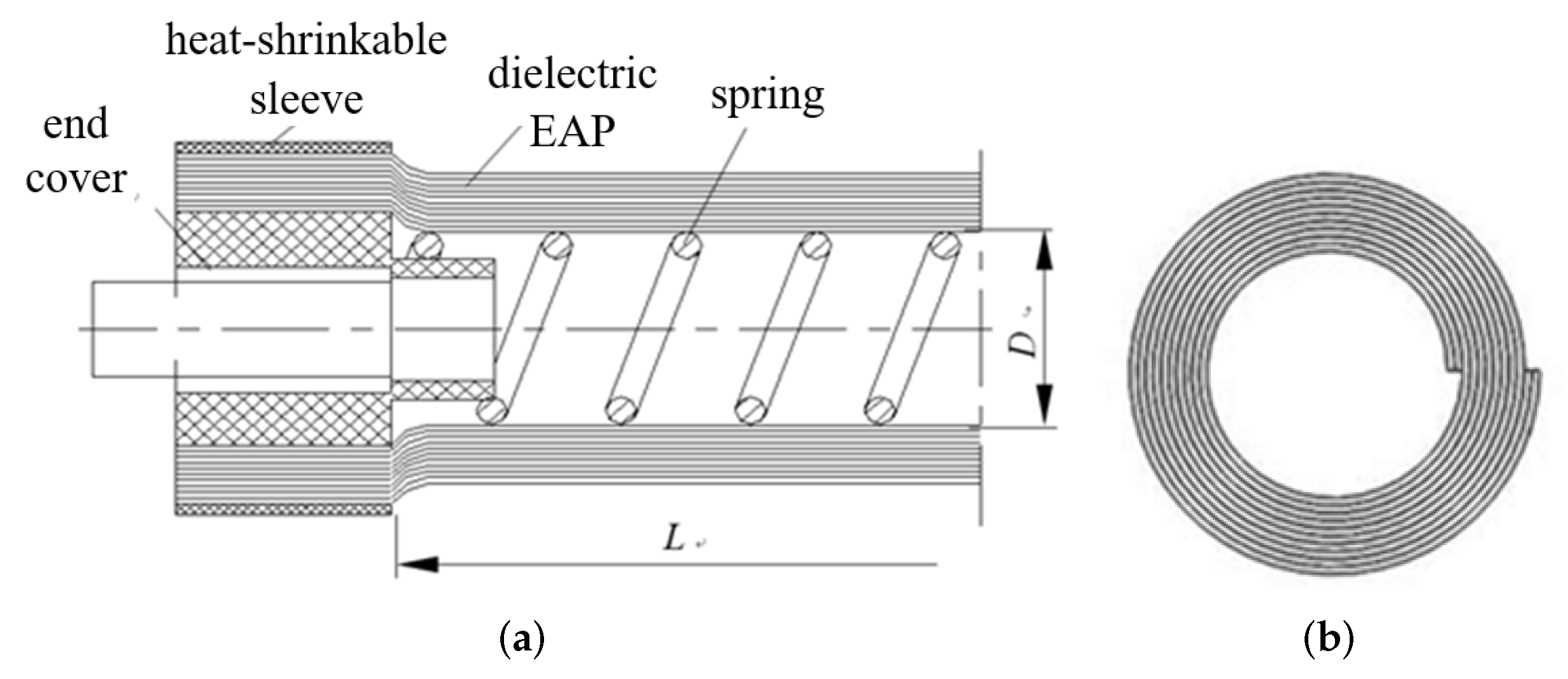
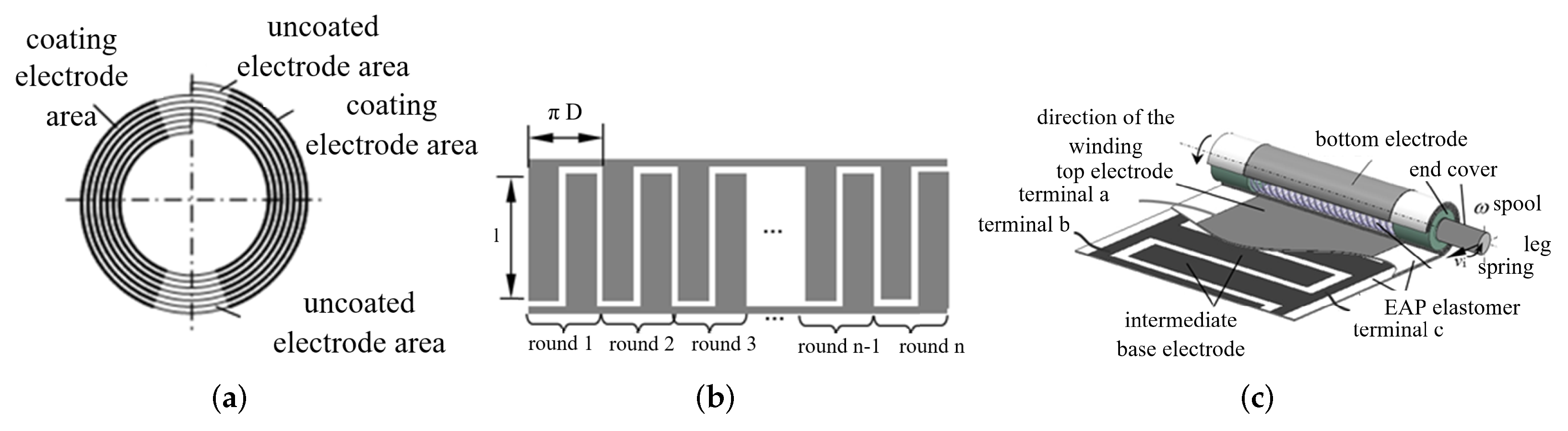
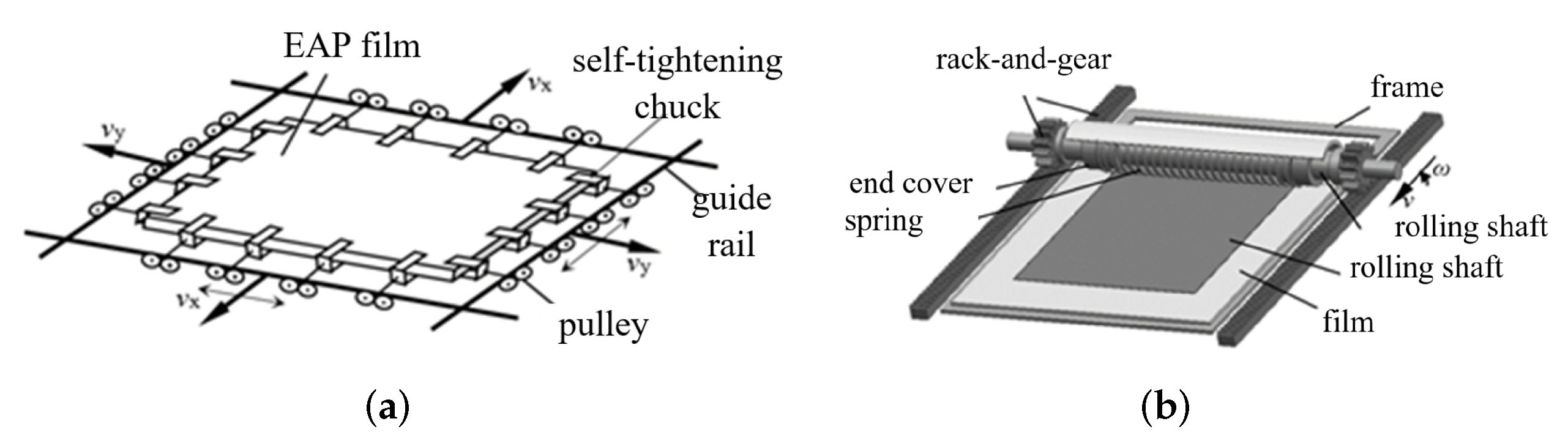
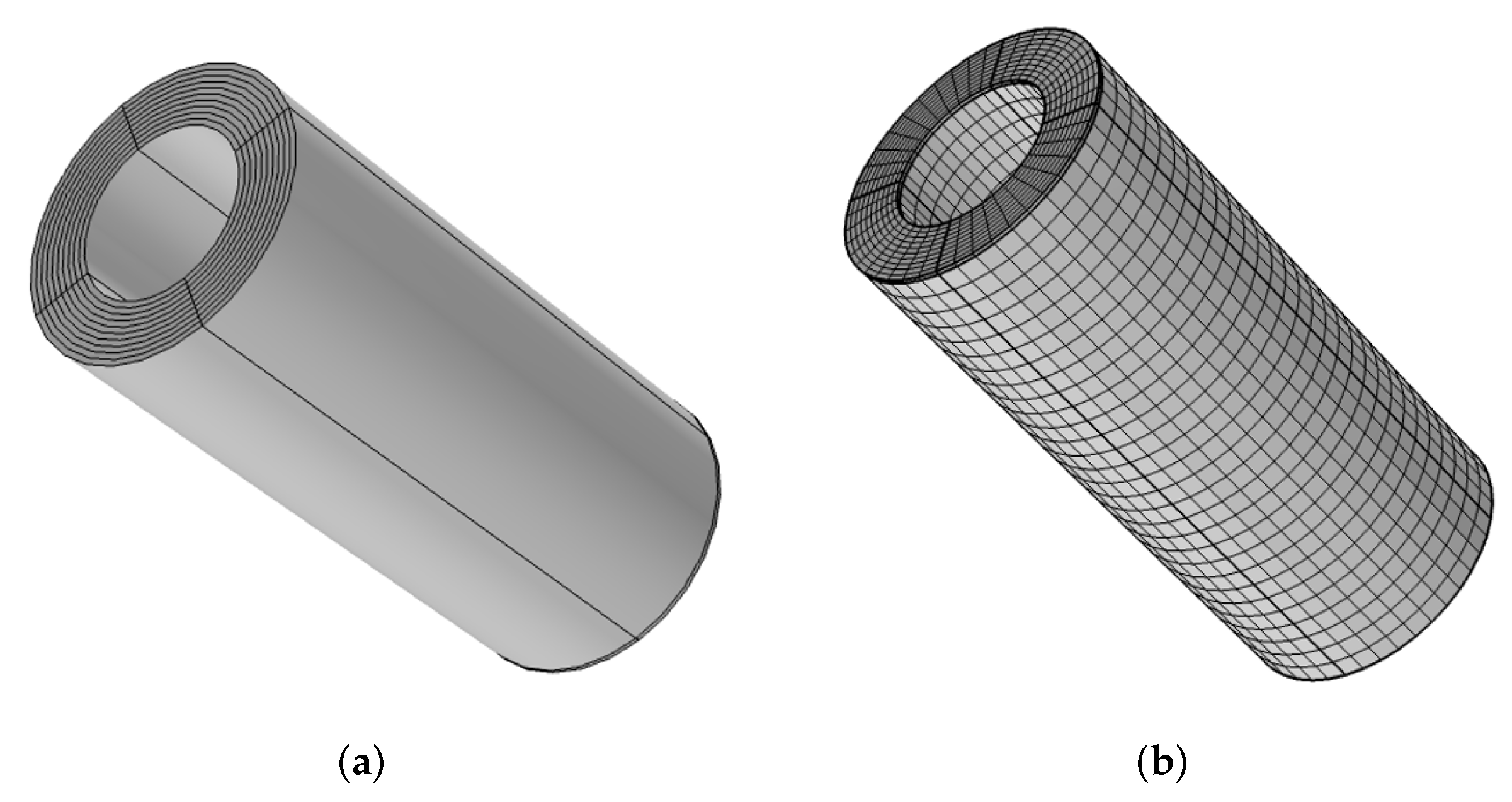
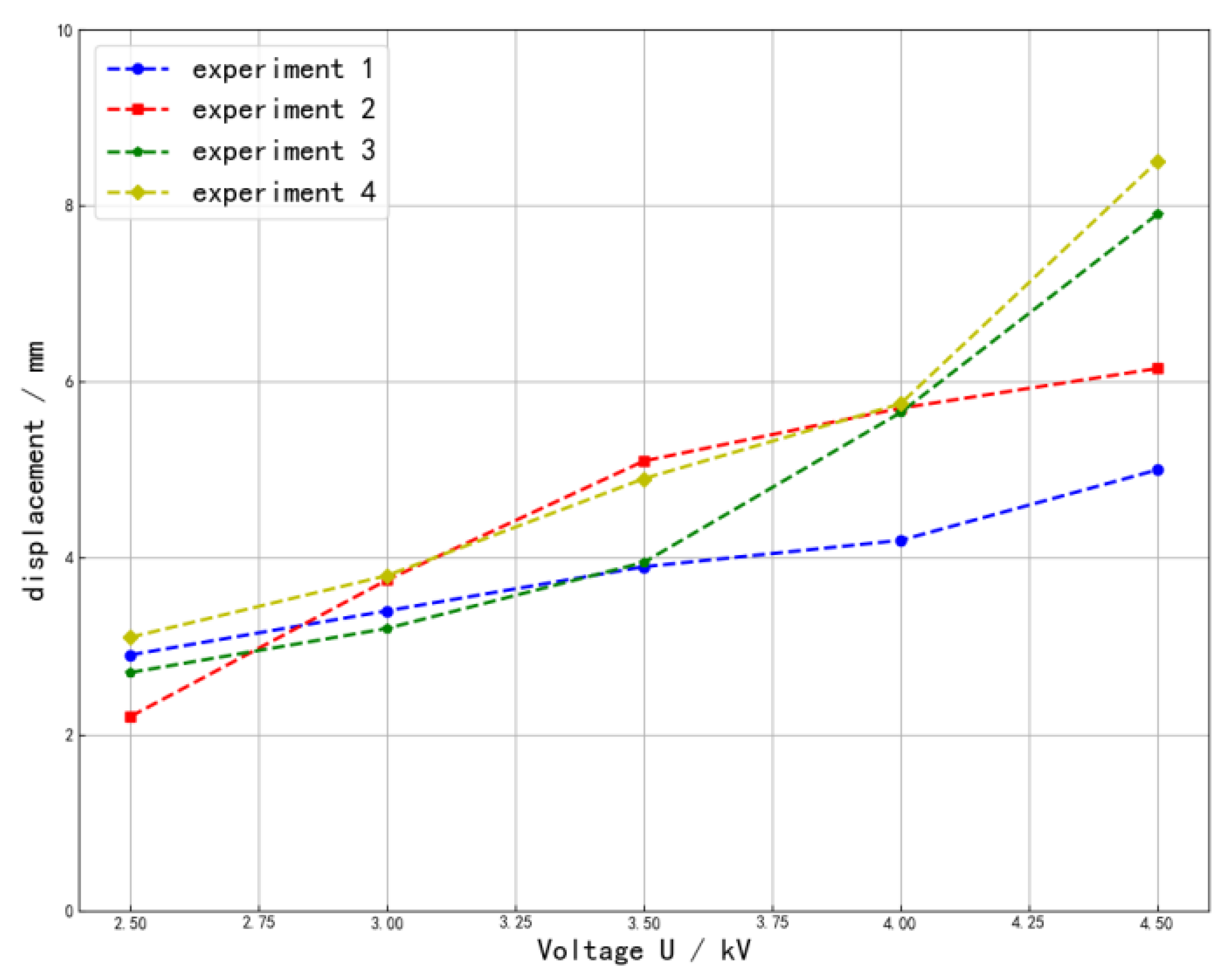
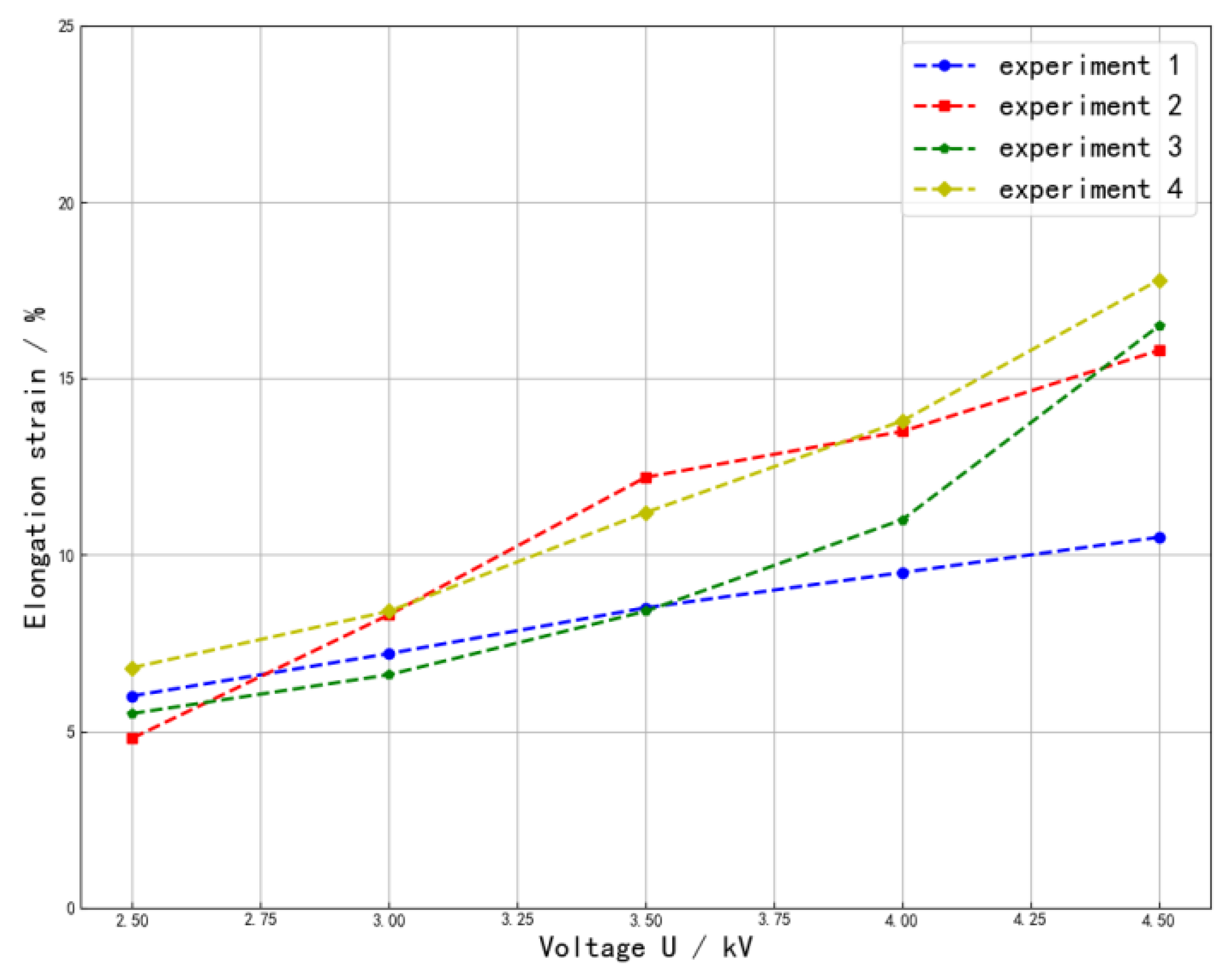
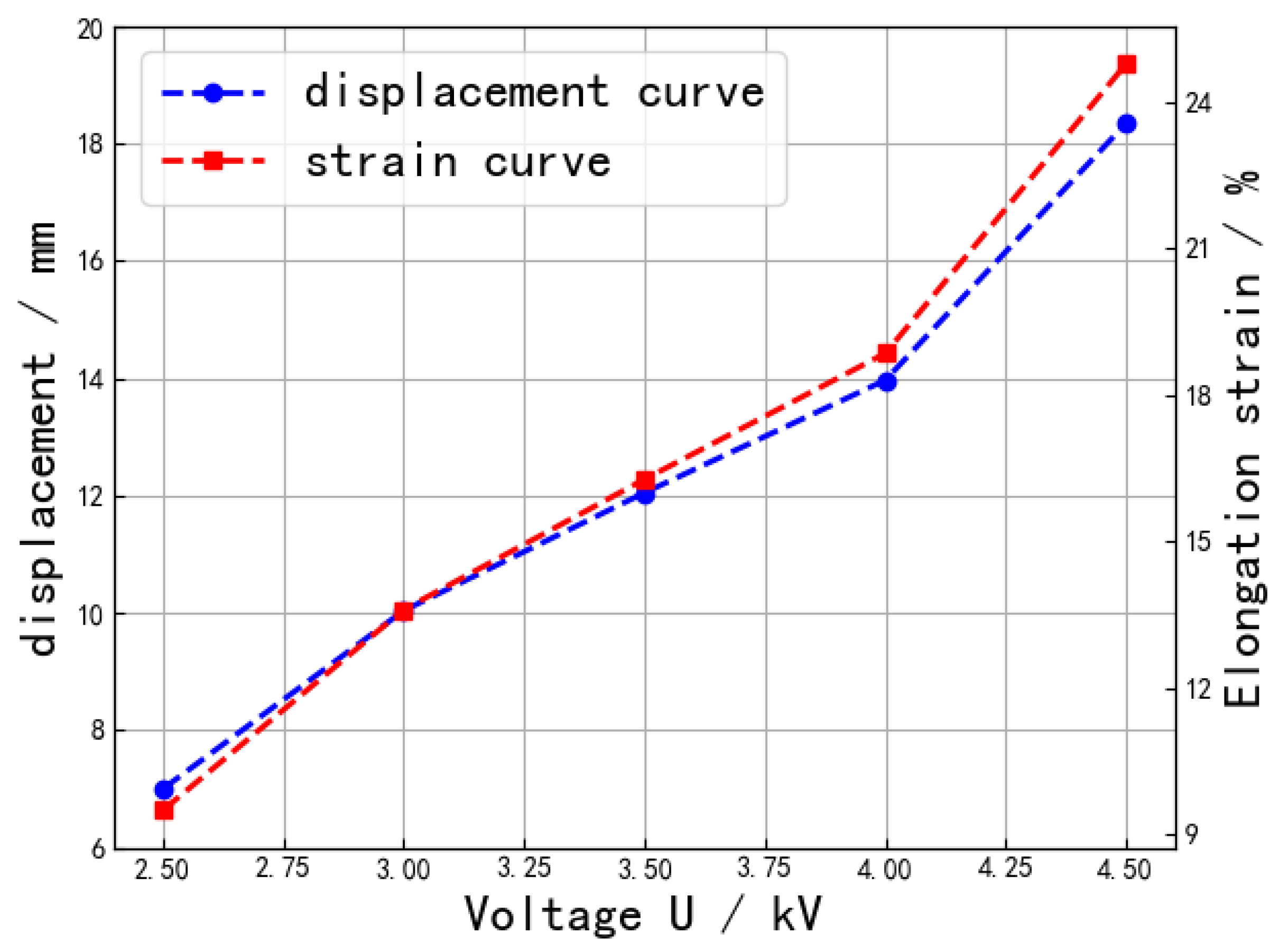
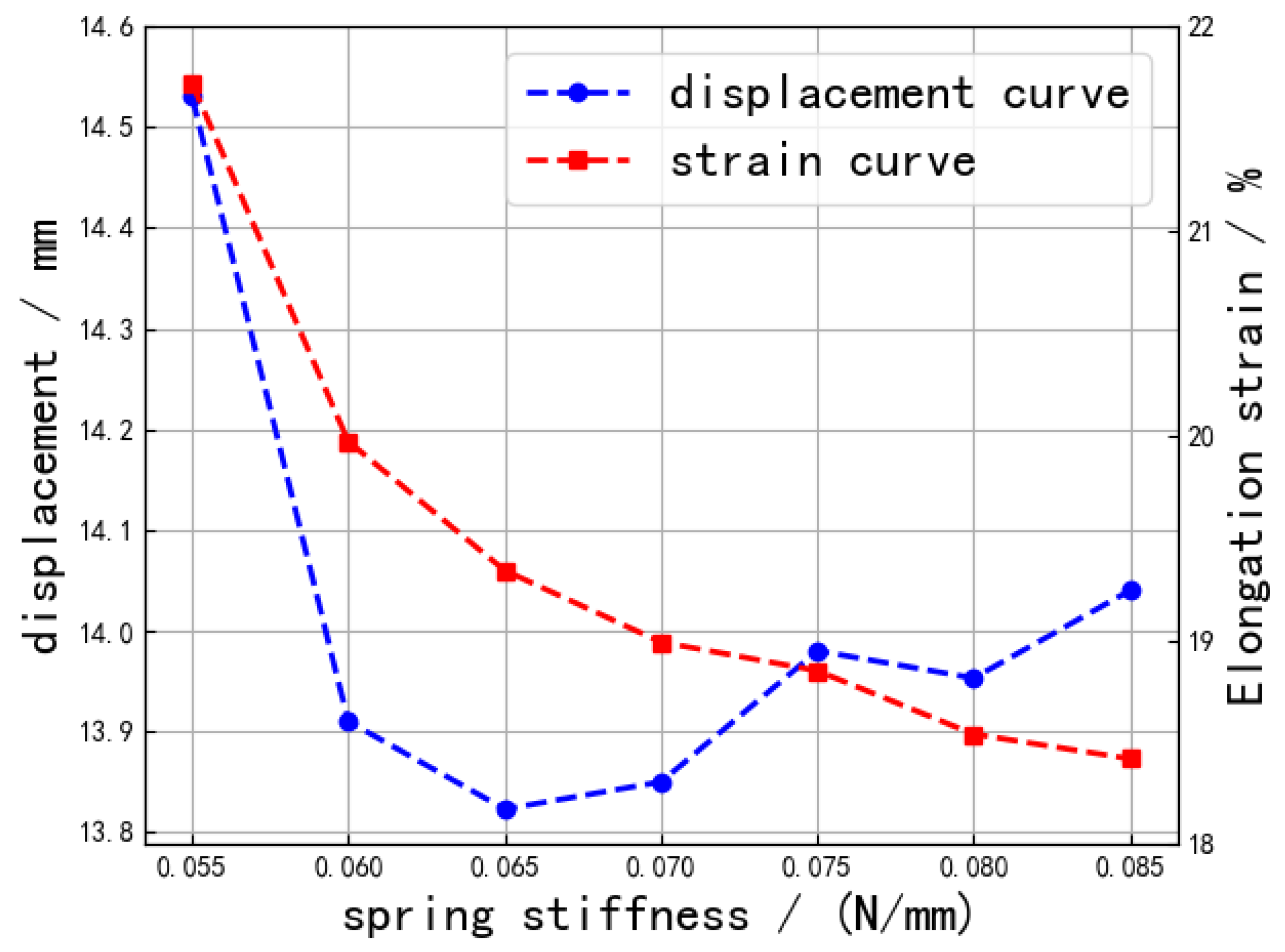
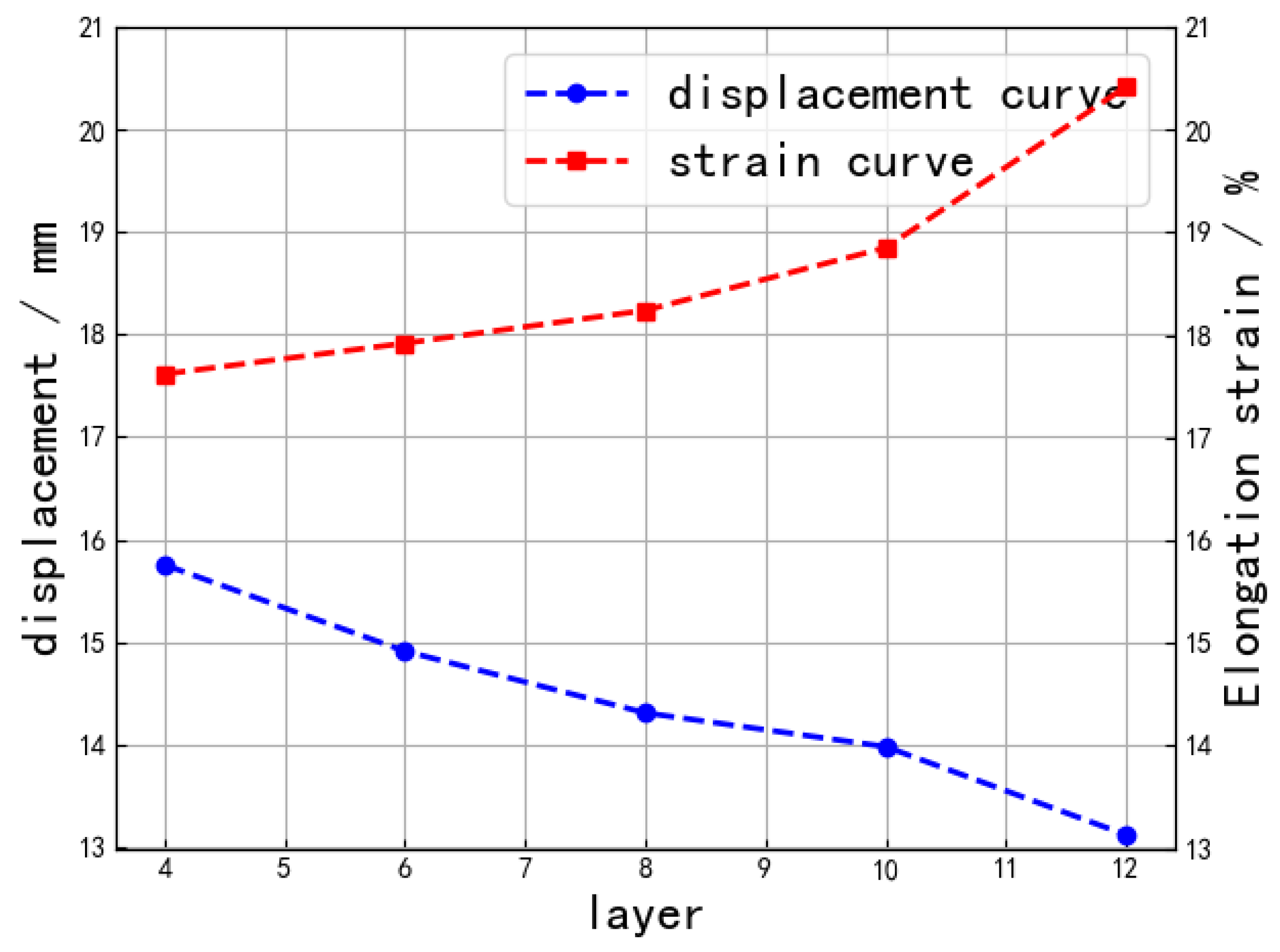
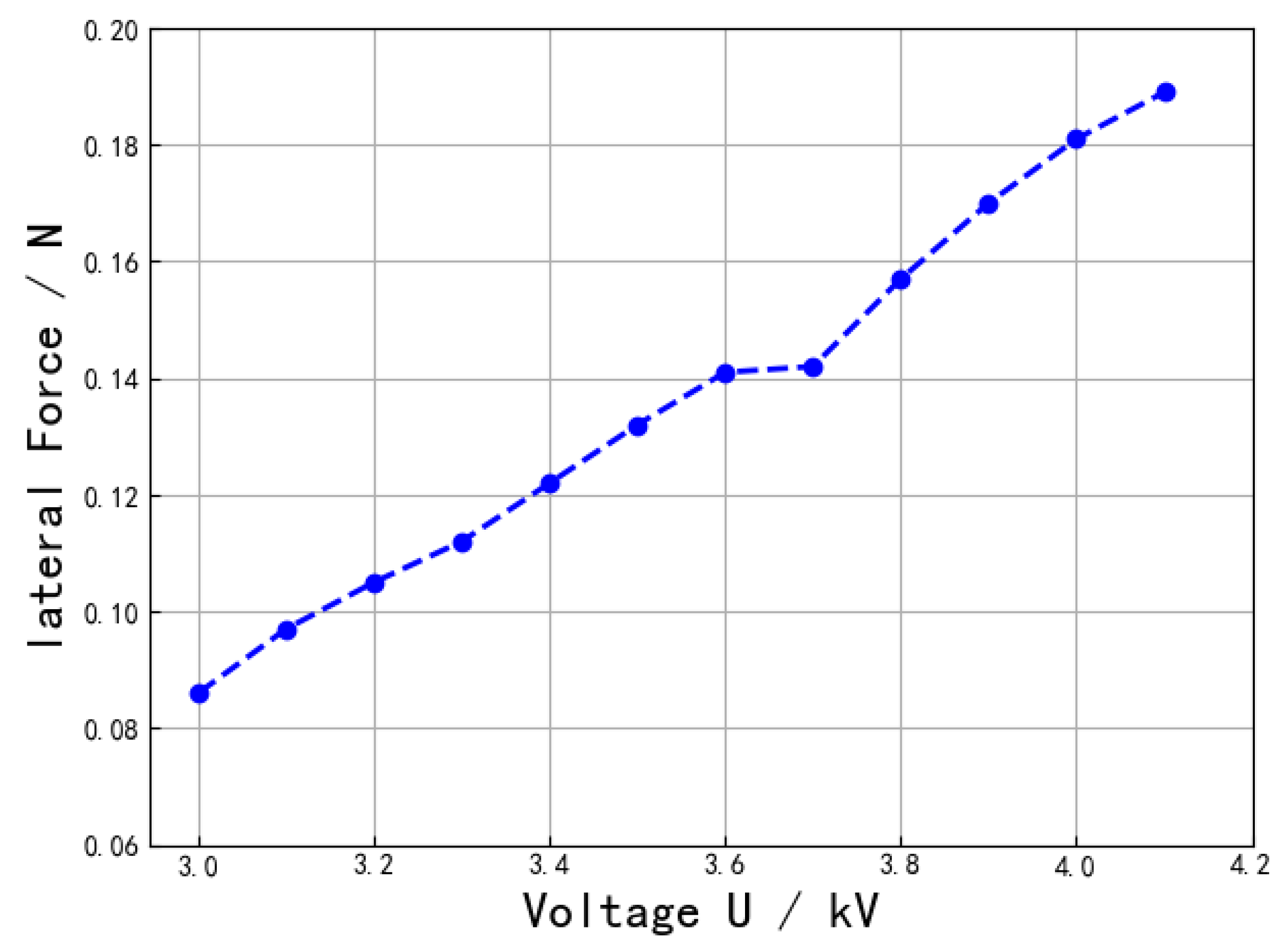
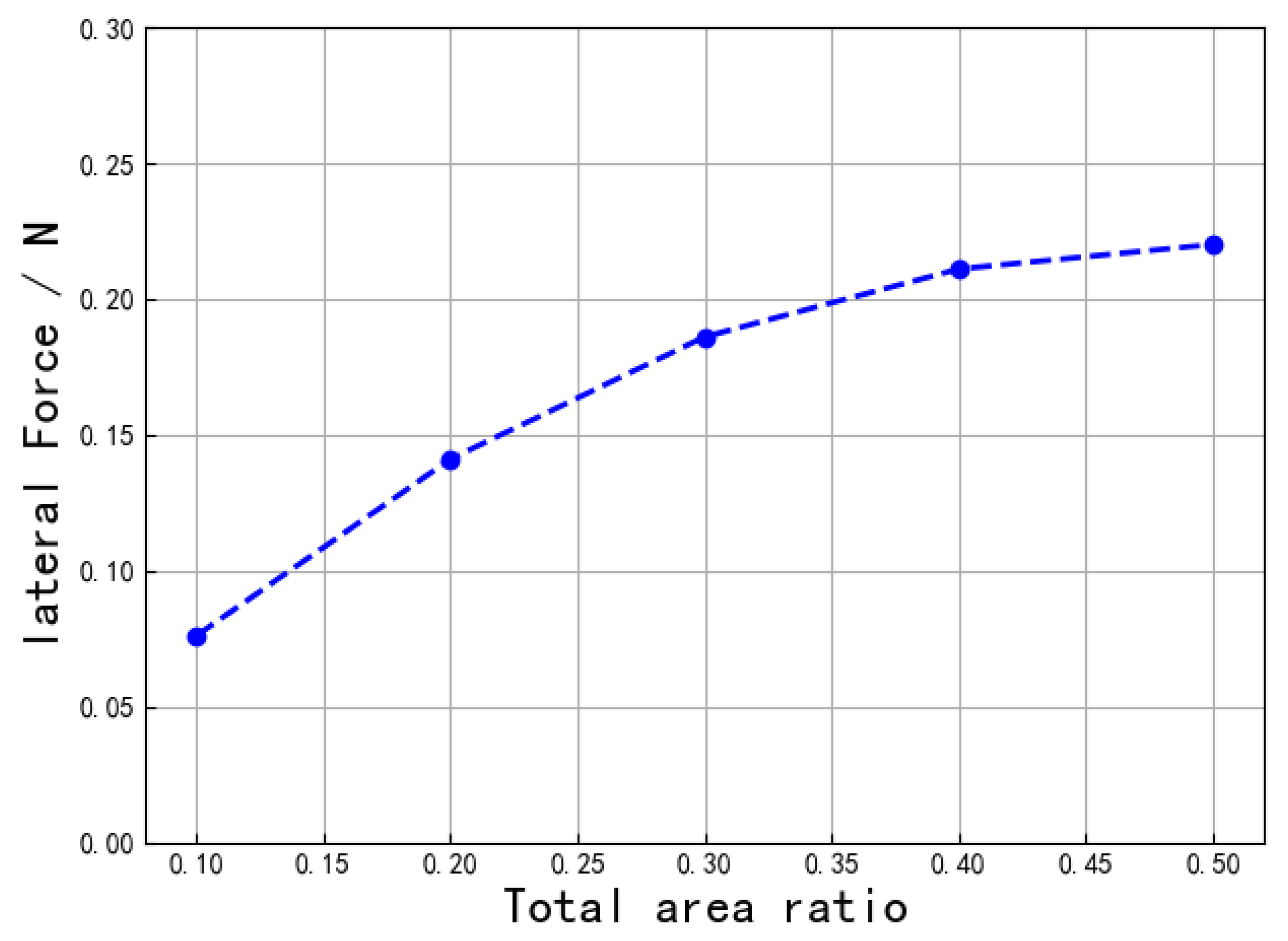
Although the research and application of EAP materials have been greatly developed, the simulation of the electromechanical coupling part of EAP materials is still not mature. In this paper, two cylindrical actuators are designed and fabricated by using the change of the coating layer. One is a single-degree-of-freedom actuator that can realize a telescopic motion, and the other is a two-degree-of-freedom actuator that can realize a telescopic and bending motion. Experiments are designed for the factors affecting the actuator, and the corresponding electromechanical coupling model is established for simulation based on the experiments. According to the experimental and simulation results. the effects of the actuator film stretching rate, voltage, and spring stiffness on the mechanical properties of the actuators are analyzed.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}