
Real-Time Prediction of Remaining Useful Life for Composite Laminates with Unknown Inputs and Varying Threshold


Abstract
:1. Introduction
2. Fatigue Damage Modeling
2.1. Wiener-Process-Based Degradation Model
2.2. Fatigue Damage Propagation Model
3. Self-Calibration Kalman Filtering for Diagnosis and Prognosis
3.1. Dynamic State-Space Model and Current State Estimation
| Algorithm 1 SCKF for degradation state estimation |
| 1: Initialize: |
| 2: for , do |
| -Time update: |
| if |
| else |
| end |
| -Measurement update: |
| end |
| 3: End |
3.2. Future State Prediction
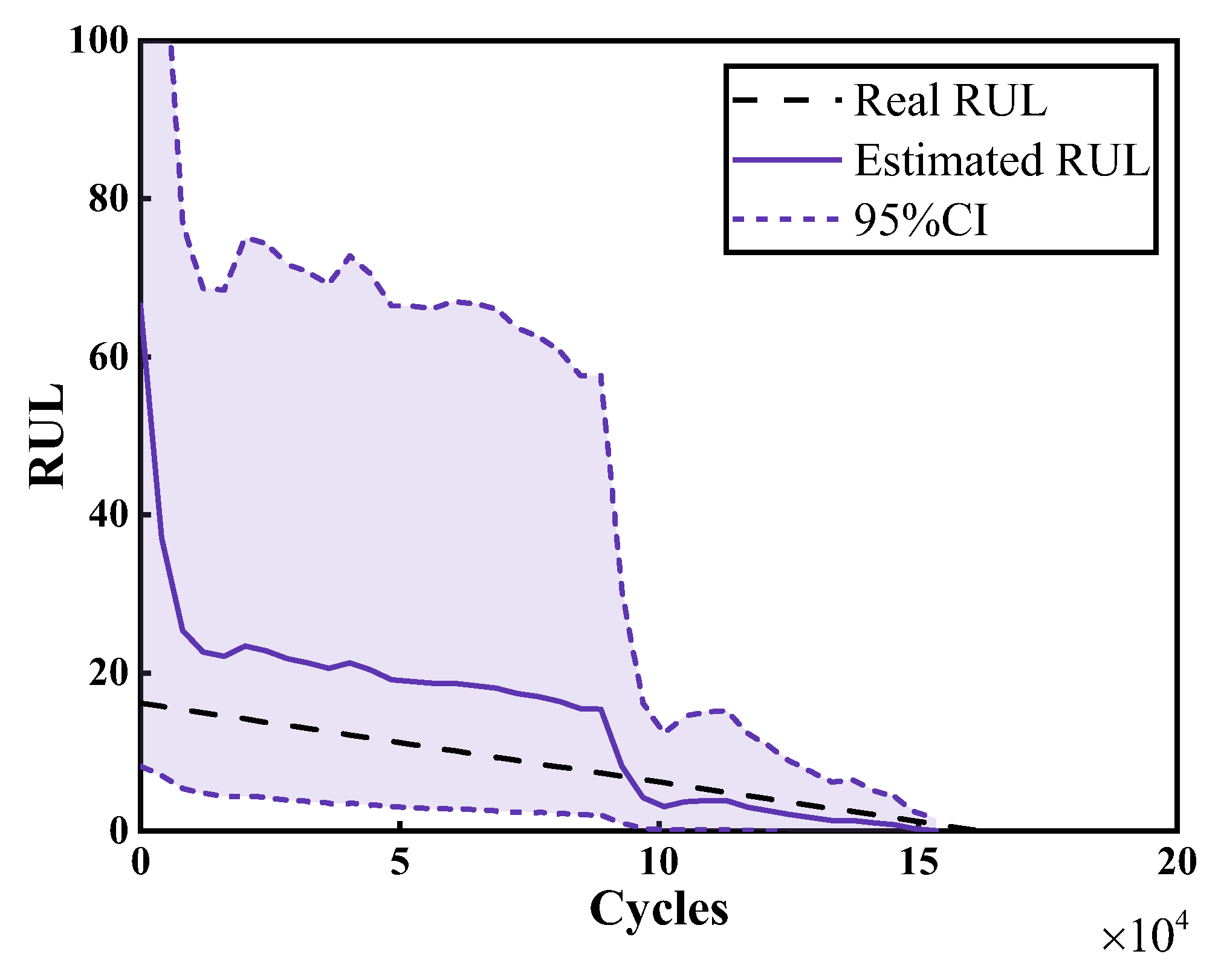
3.3. RUL Prediction
4. Case Study and Discussions
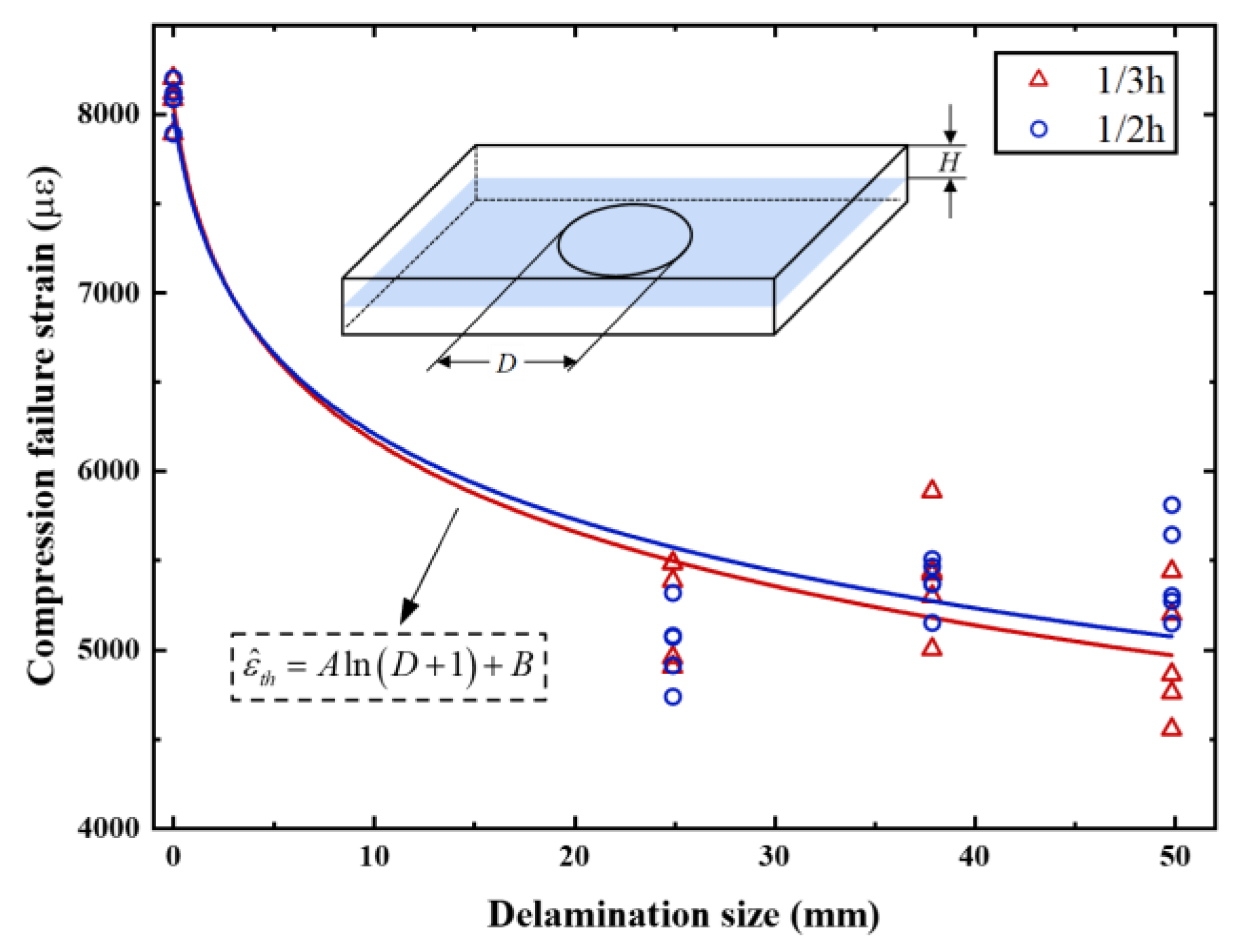
4.1. The Time-Varying Failure Threshold
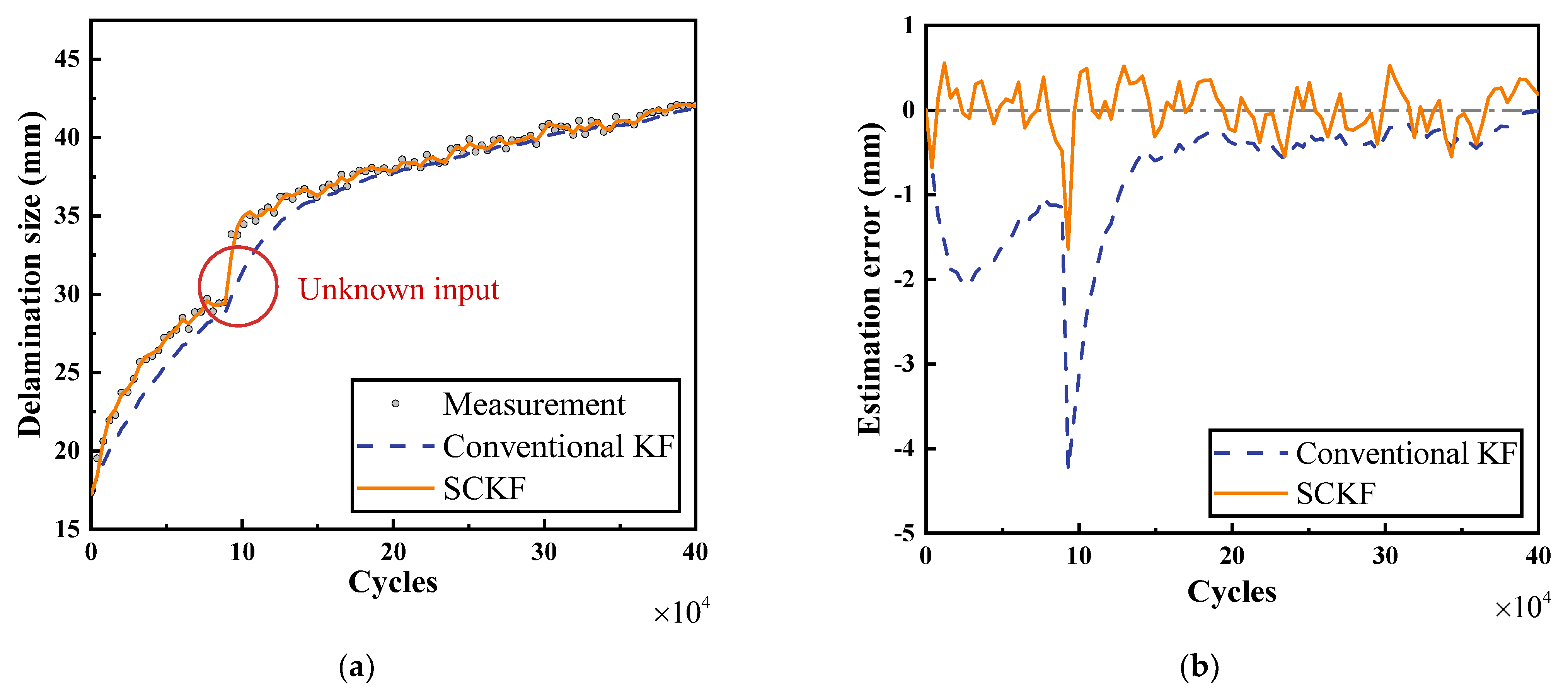
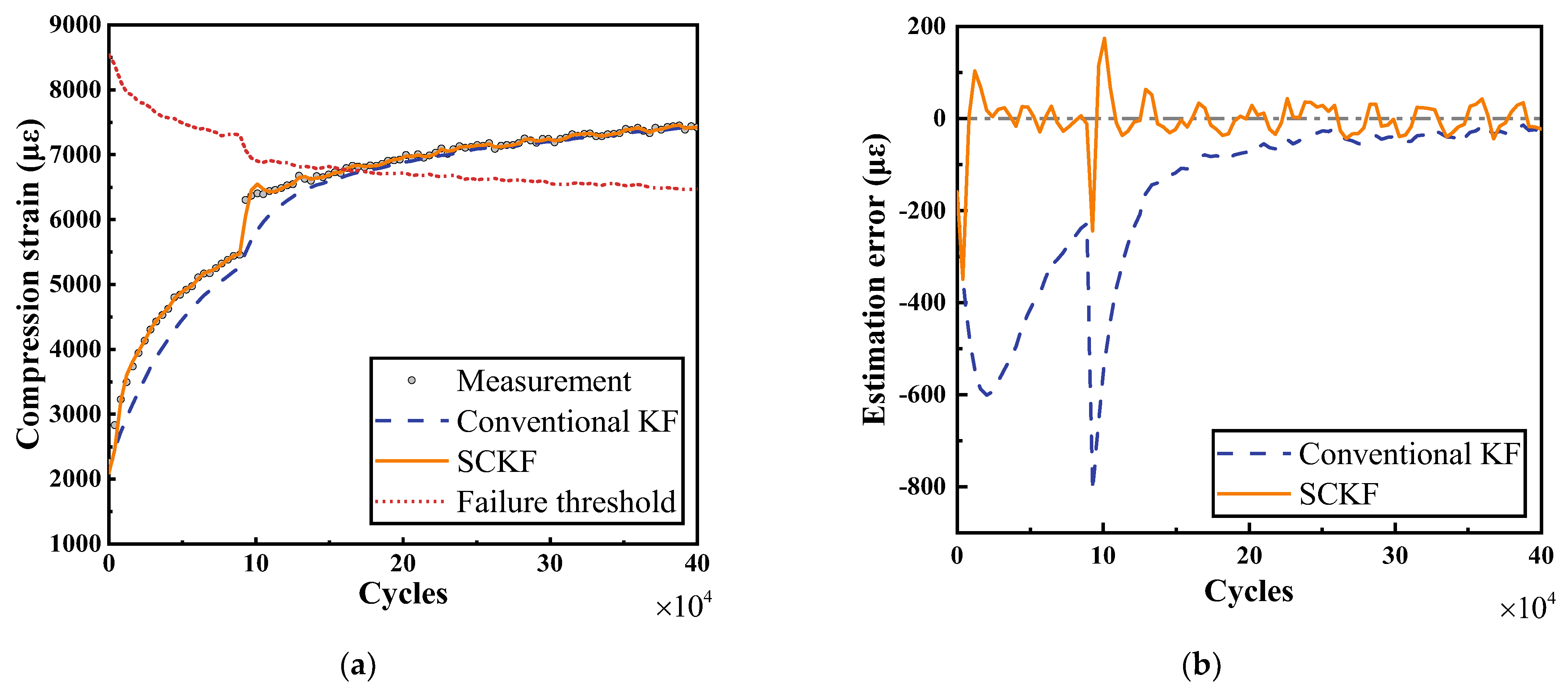
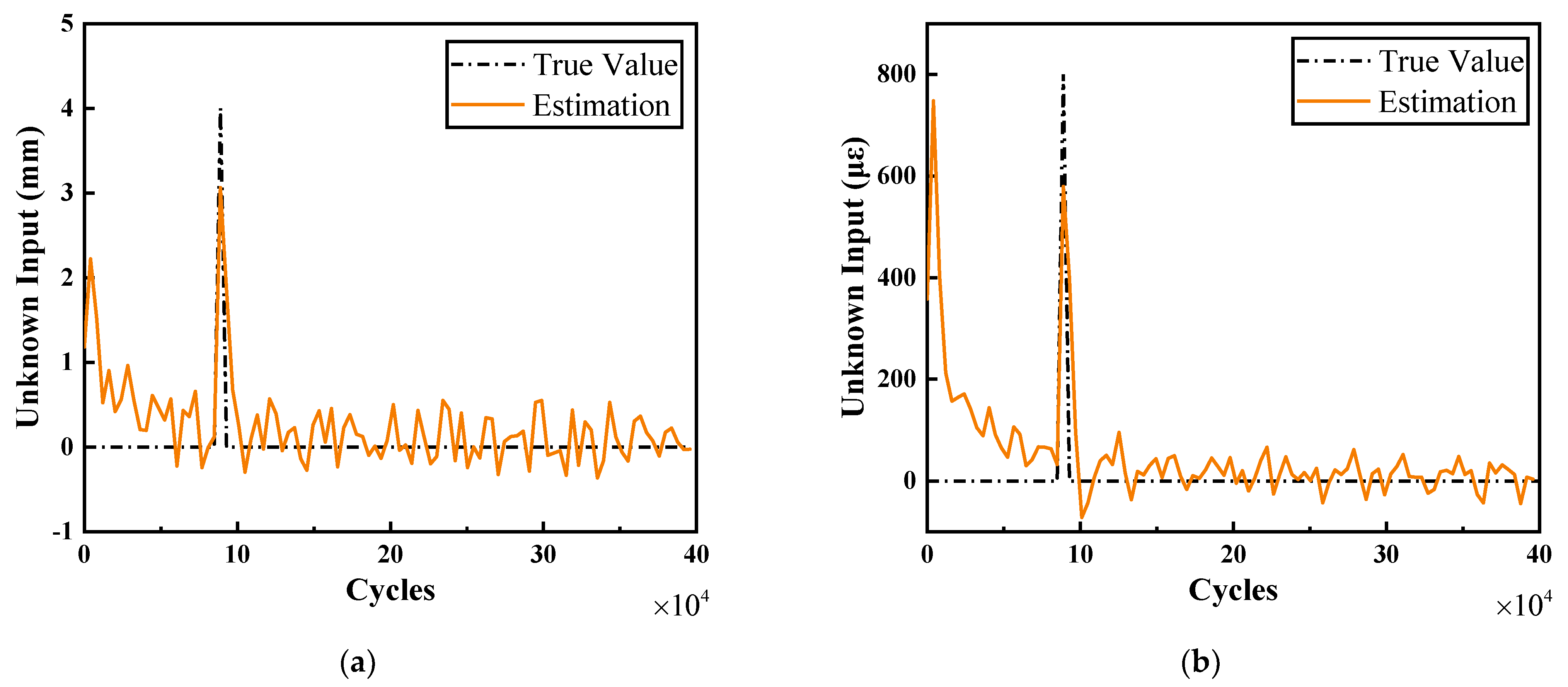
4.2. RUL Prediction of Composite Laminates with Delamination
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Peng, L.; Zhao, L.; Fei, B. Fatigue Delamination Growth Rates and Thresholds of Composite Laminates under Mixed Mode Loading. Int. J. Fatigue 2012, 40, 7–15. [Google Scholar] [CrossRef]
- Gong, Y.; Li, W.; Liu, H.; Yuan, S.; Wu, Z.; Zhang, C. A Novel Understanding of the Normalized Fatigue Delamination Model for Composite Multidirectional Laminates. Compos. Struct. 2019, 229, 111395. [Google Scholar] [CrossRef]
- D’Amore, A.; Giorgio, M.; Grassia, L. Modeling the Residual Strength of Carbon Fiber Reinforced Composites Subjected to Cyclic Loading. Int. J. Fatigue 2015, 78, 31–37. [Google Scholar] [CrossRef]
- Wan, A.; Xiong, J.; Xu, Y. Fatigue Life Prediction of Woven Composite Laminates with Initial Delamination. Fatigue Fract. Eng. Mater. Struct. 2020, 43, 2130–2146. [Google Scholar] [CrossRef]
- Zong, J.; Yao, W. Fatigue life prediction of composite structures based on online stiffness monitoring. J. Reinf. Plast. Compos. 2017, 36, 1038–1057. [Google Scholar] [CrossRef]
- Gao, J.; Zhu, P.; Yuan, Y.; Wu, Z.; Xu, R. Strength and Stiffness Degradation Modeling and Fatigue Life Prediction of Composite Materials Based on a Unified Fatigue Damage Model. Eng. Fail. Anal. 2022, 137, 106290. [Google Scholar] [CrossRef]
- Dong, H.; Li, Z.; Wang, J.; Karihaloo, B.L. A New Fatigue Failure Theory for Multidirectional Fiber-Reinforced Composite Laminates with Arbitrary Stacking Sequence. Int. J. Fatigue 2016, 87, 294–300. [Google Scholar] [CrossRef]
- Lynch, J.P. A Summary Review of Wireless Sensors and Sensor Networks for Structural Health Monitoring. Shock Vib. Dig. 2006, 38, 91–128. [Google Scholar] [CrossRef] [Green Version]
- Farrar, C.R.; Worden, K. An Introduction to Structural Health Monitoring. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef]
- Wu, Z.; Qing, X.P.; Chang, F.-K. Damage Detection for Composite Laminate Plates with A Distributed Hybrid PZT/FBG Sensor Network. J. Intell. Mater. Syst. Struct. 2009, 20, 1069–1077. [Google Scholar] [CrossRef]
- Da Silva, L.F.M.; Moreira, P.M.G.P.; Loureiro, A.L.D. Determination of the Strain Distribution in Adhesive Joints Using Fiber Bragg Grating (FBG). J. Adhes. Sci. Technol. 2014, 28, 1480–1499. [Google Scholar] [CrossRef] [Green Version]
- Grave, J.H.L.; Haheim, M.L.; Echtermeyer, A.T. Measuring Changing Strain Fields in Composites with Distributed Fiber-Optic Sensing Using the Optical Backscatter Reflectometer. Compos. Part B Eng. 2015, 74, 138–146. [Google Scholar] [CrossRef]
- Cantero-Chinchilla, S.; Malik, M.K.; Chronopoulos, D.; Chiachio, J. Bayesian Damage Localization and Identification Based on a Transient Wave Propagation Model for Composite Beam Structures. Compos. Struct. 2021, 267, 113849. [Google Scholar] [CrossRef]
- Khomenkd, A.; Karpenko, O.; Koricho, E.; Haq, M.; Cloud, G.L.; Udpa, L. Theory and Validation of Optical Transmission Scanning for Quantitative NDE of Impact Damage in GFRP Composites. Compos. Part B Eng. 2016, 107, 182–191. [Google Scholar] [CrossRef]
- Saeedifar, M.; Zarouchas, D. Damage Characterization of Laminated Composites Using Acoustic Emission: A Review. Compos. Part B Eng. 2020, 195, 108039. [Google Scholar] [CrossRef]
- Feng, T.; Bekas, D.; Aliabadi, M.H.F. Active Health Monitoring of Thick Composite Structures by Embedded and Surface-Mounted Piezo Diagnostic Layer. Sensors 2020, 20, 3410. [Google Scholar] [CrossRef]
- Andreades, C.; Fierro, G.P.M.; Meo, M. A Nonlinear Ultrasonic SHM Method for Impact Damage Localisation in Composite Panels Using a Sparse Array of Piezoelectric PZT Transducers. Ultrasonics 2020, 108, 106181. [Google Scholar] [CrossRef]
- Chalioris, C.E.; Kytinou, V.K.; Voutetaki, M.E.; Karayannis, C.G. Flexural Damage Diagnosis in Reinforced Concrete Beams Using a Wireless Admittance Monitoring System-Tests and Finite Element Analysis. Sensors 2021, 21, 679. [Google Scholar] [CrossRef]
- Peng, T.; Liu, Y.; Saxena, A.; Goebel, K. In-Situ Fatigue Life Prognosis for Composite Laminates Based on Stiffness Degradation. Compos. Struct. 2015, 132, 155–165. [Google Scholar] [CrossRef]
- Corbetta, M.; Sbarufatti, C.; Giglio, M.; Saxena, A.; Goebel, K. A Bayesian Framework for Fatigue Life Prediction of Composite Laminates under Co-Existing Matrix Cracks and Delamination. Compos. Struct. 2018, 187, 58–70. [Google Scholar] [CrossRef]
- Banerjee, P.; Palanisamy, R.P.; Udpa, L.; Haq, M.; Deng, Y. Prognosis of Fatigue Induced Stiffness Degradation in GFRPs Using Multi-Modal NDE Data. Compos. Struct. 2019, 229, 111424. [Google Scholar] [CrossRef]
- Liu, Y.; Mohanty, S.; Chattopadhyay, A. Condition Based Structural Health Monitoring and Prognosis of Composite Structures under Uniaxial and Biaxial Loading. J. Nondestruct. Eval. 2010, 29, 181–188. [Google Scholar] [CrossRef]
- Chiachío, J.; Chiachío, M.; Sankararaman, S.; Saxena, A.; Goebel, K. Condition-Based Prediction of Time-Dependent Reliability in Composites. Reliab. Eng. Syst. Saf. 2015, 142, 134–147. [Google Scholar] [CrossRef] [Green Version]
- Eleftheroglou, N.; Loutas, T. Fatigue Damage Diagnostics and Prognostics of Composites Utilizing Structural Health Monitoring Data and Stochastic Processes. Struct. Health Monit. 2016, 15, 473–488. [Google Scholar] [CrossRef]
- Loutas, T.; Eleftheroglou, N.; Zarouchas, D. A Data-Driven Probabilistic Framework towards the in-Situ Prognostics of Fatigue Life of Composites Based on Acoustic Emission Data. Compos. Struct. 2017, 161, 522–529. [Google Scholar] [CrossRef]
- Banerjee, P.; Karpenko, O.; Udpa, L.; Haq, M.; Deng, Y. Prediction of Impact-Damage Growth in GFRP Plates Using Particle Filtering Algorithm. Compos. Struct. 2018, 194, 527–536. [Google Scholar] [CrossRef]
- Pugalenthi, K.; Trung Duong, P.L.; Doh, J.; Hussain, S.; Jhon, M.H.; Raghavan, N. Online Prognosis of Bimodal Crack Evolution for Fatigue Life Prediction of Composite Laminates Using Particle Filters. Appl. Sci. 2021, 11, 6046. [Google Scholar] [CrossRef]
- Eleftheroglou, N.; Zarouchas, D.; Loutas, T.; Alderliesten, R.; Benedictus, R. Structural Health Monitoring Data Fusion for In-Situ Life Prognosis of Composite Structures. Reliab. Eng. Syst. Saf. 2018, 178, 40–54. [Google Scholar] [CrossRef] [Green Version]
- Cristiani, D.; Sbarufatti, C.; Giglio, M. Damage Diagnosis and Prognosis in Composite Double Cantilever Beam Coupons by Particle Filtering and Surrogate Modelling. Struct. Health Monit. 2021, 20, 1030–1050. [Google Scholar] [CrossRef]
- Yong Lee, I.; Doh Roh, H.; Park, Y.-B. Prediction Method for Propagating Crack Length of Carbon-Fiber-Based Composite Double Cantilever Beam Using Its Electromechanical Behavior and Particle Filter. Compos. Struct. 2022, 279, 114650. [Google Scholar] [CrossRef]
- Si, X.-S.; Wang, W.; Hu, C.-H.; Chen, M.-Y.; Zhou, D.-H. A Wiener-Process-Based Degradation Model with a Recursive Filter Algorithm for Remaining Useful Life Estimation. Mech. Syst. Signal Process. 2013, 35, 219–237. [Google Scholar] [CrossRef]
- Ye, Z.-S.; Chen, N. The Inverse Gaussian Process as a Degradation Model. Technometrics 2014, 56, 302–311. [Google Scholar] [CrossRef]
- Lin, Y.-H.; Ding, Z.-Q. An Integrated Degradation Modeling Framework Considering Model Uncertainty and Calibration. Mech. Syst. Signal Process. 2022, 166, 108389. [Google Scholar] [CrossRef]
- Xiao, M.; Zhang, Y.; Wang, Z.; Fu, H. An Adaptive Three-Stage Extended Kalman Filter for Nonlinear Discrete-Time System in Presence of Unknown Inputs. ISA Trans. 2018, 75, 101–117. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006; ISBN 0-470-04533-7. [Google Scholar]
- Guo, J.; Zhang, Y.; Chen, K. Algorithm for Compression Design Allowable Determination of Composite Laminates with Initial Delaminations. Machines 2021, 9, 307. [Google Scholar] [CrossRef]
- Huang, J.; Pastor, M.L.; Garnier, C.; Gong, X.J. A New Model for Fatigue Life Prediction Based on Infrared Thermography and Degradation Process for CFRP Composite Laminates. Int. J. Fatigue 2019, 120, 87–95. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specimen Type | Damage Variables | Sensors/Sensing Technologies | References |
|---|---|---|---|
| Composite beam with notch | Damage index | Strain gauge | Liu et al. [22] (2010) |
| Composite plate with notch | Microcrack density, delamination area, stiffness | PZT, strain gauge, X-ray | Chiachío et al. [23] (2015) |
| Open-hole composite plate | Residual stiffness | PZT | Peng et al. [19] (2015) |
| Open-hole composite plate | AE feature | AE | Eleftheroglou et al. [24] (2016), Loutas et al. [25] (2017) |
| Open-hole composite plate | Matrix crack density, delamination area, stiffness | X-ray, strain gauge | Corbetta et al. [20] (2018) |
| Impacted composite plate | Delamination area | OTS | Banerjee et al. [26] (2018), Pugalenthi et al. [27] (2021) |
| Open-hole composite plate | Feature value | AE, digital image correlation (DIC) | Eleftheroglou et al. [28] (2018) |
| Open-hole composite plate | Residual stiffness | OTS, GW | Banerjee et al. [21] (2019) |
| Composite double cantilever beam (DCB) | Delamination length | Fiber Bragg grating strain sensor | Cristiani et al. [29] (2020) |
| Composite DCB | Crack length | Digital multimeter | Lee et al. [30] (2022) |
| Filtering Method | Average RMSE | |
|---|---|---|
| Delamination Size (mm) | Compression Strain (με) | |
| KF | 1.3005 | 279.6375 |
| SCKF | 0.5170 | 65.6601 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Zhang, Y.; Wang, J. Real-Time Prediction of Remaining Useful Life for Composite Laminates with Unknown Inputs and Varying Threshold. Machines 2022, 10, 1185. https://doi.org/10.3390/machines10121185
Guo J, Zhang Y, Wang J. Real-Time Prediction of Remaining Useful Life for Composite Laminates with Unknown Inputs and Varying Threshold. Machines. 2022; 10(12):1185. https://doi.org/10.3390/machines10121185
Chicago/Turabian StyleGuo, Jianchao, Yongbo Zhang, and Junling Wang. 2022. "Real-Time Prediction of Remaining Useful Life for Composite Laminates with Unknown Inputs and Varying Threshold" Machines 10, no. 12: 1185. https://doi.org/10.3390/machines10121185