4.2.1. Speed Planning Results
We conducted the EC on two real-life roads featuring many hills: the urban expressway between Xuanwu District Nanjing and Jurong Zhenjiang, and the motorway between Chengdu and Chongqing.
Figure 7 presents road altitude derived from Google Elevation API. The high speed limit on the expressway is 80 km/h as required by law, while the low speed limit was artificially set at 60 km/h. In the case of the motorway, both the high and low speed limits were set at 100 km/h and 60 km/h, respectively.
The prediction distance was set at a default of 1000 m. Using an average speed of 70 km/h for the expressway, the desired travel time was 51.43 s. Furthermore, we hoped that the HEV would complete the predicted distance at a speed of 70 km/h. As a result, , , , and in TMPC and SMPC were set to 19.44 m/s, 1000 m, 189.03, and 51.43 s, respectively. The prediction horizons, and were each set to 50, while the sampling intervals, and were set to 1.0286 s and 20 m, respectively.
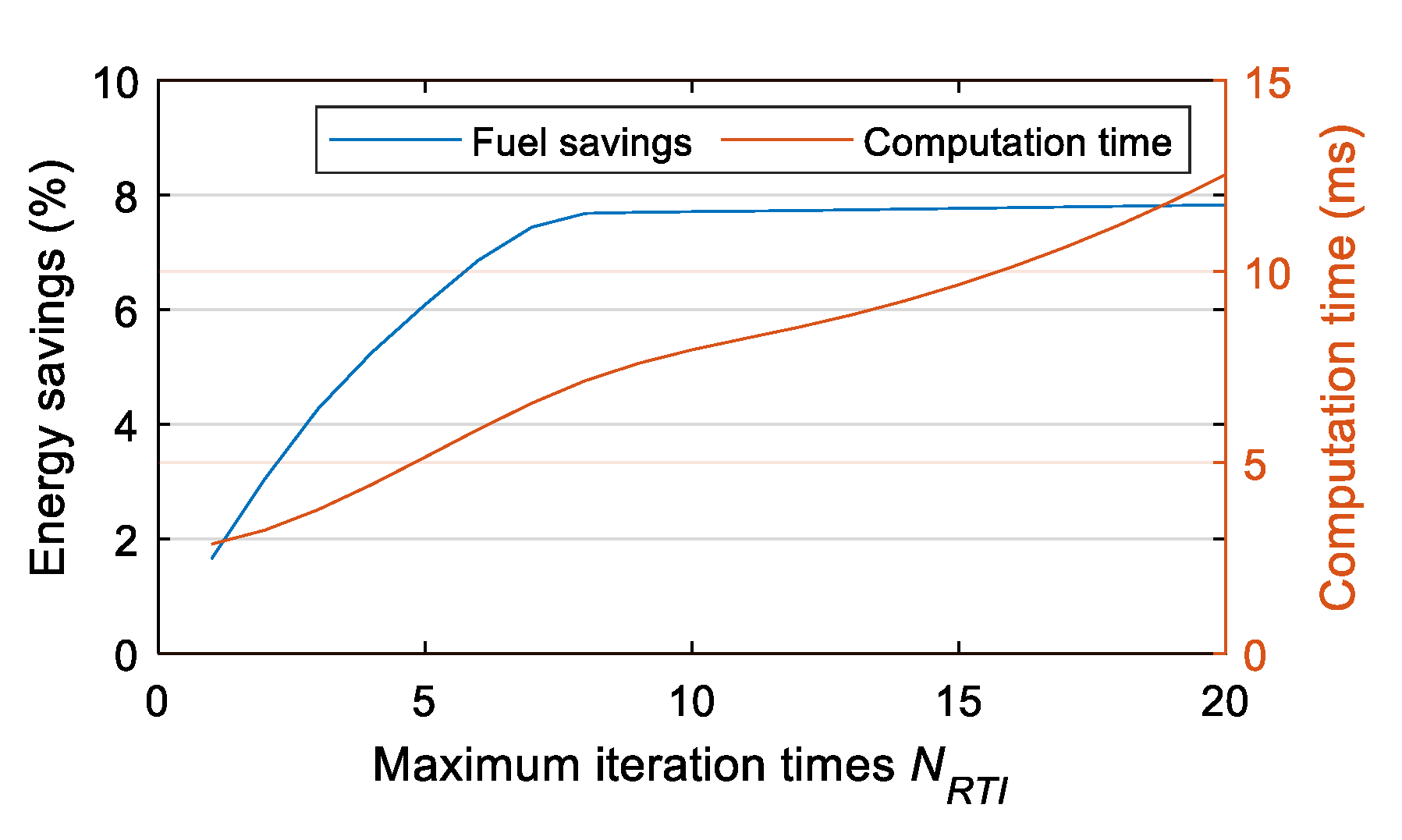
In the case of the motorway, the average speed was clearly set at 80 km/h. Considering the prediction horizon of 1000 m, the desired travel time was 45 s. We could easily obtain the MPC design parameters , , , , , , and as 22.22 km/h, 1000 m, 246.91, 45 s, 50, 50, 0.9 s, and 20 m, respectively. In the RTI algorithm, the maximum iteration times were set as 8.
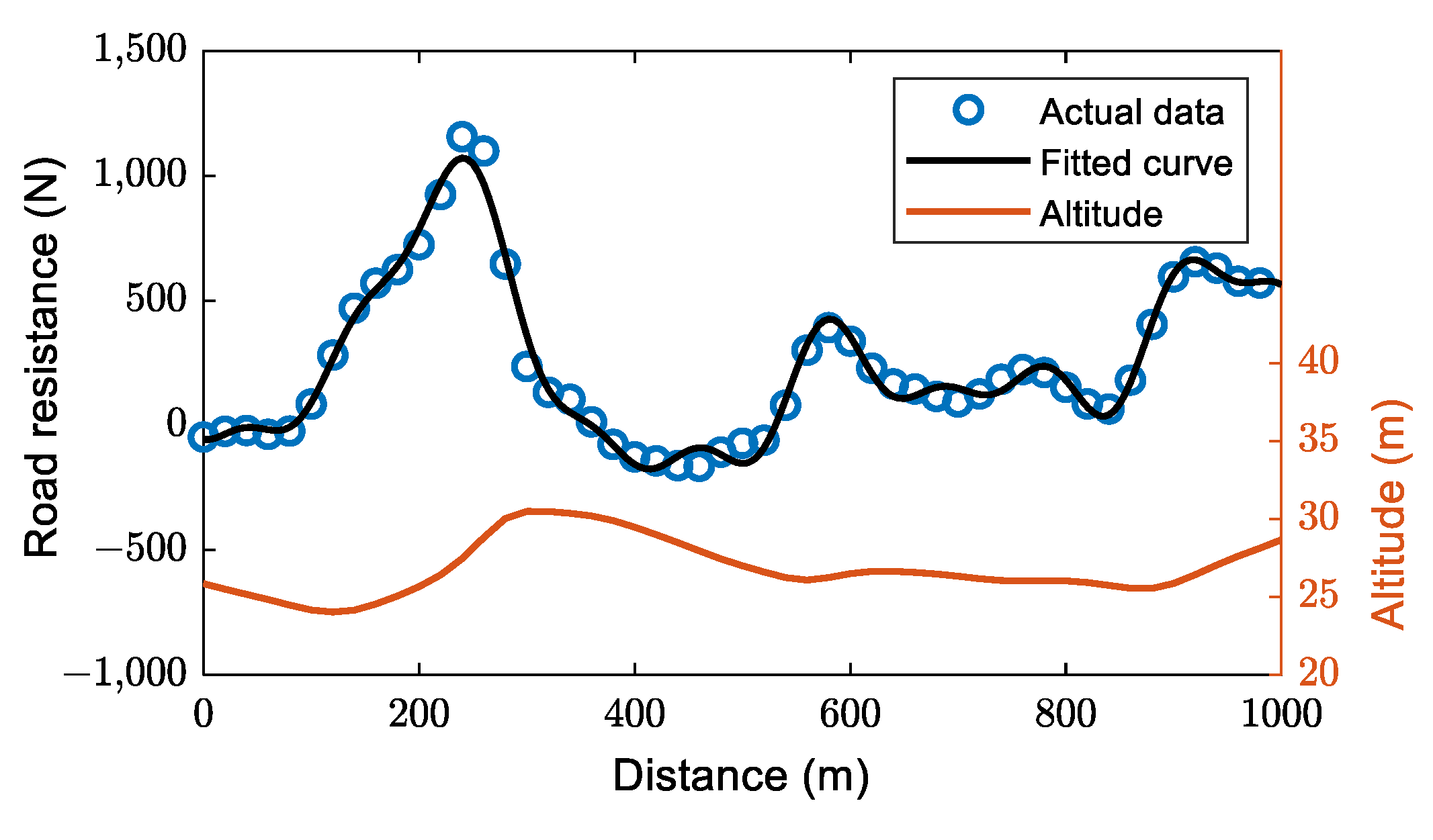
For TMPC to impose road resistance, the nonlinear function
is required. In order to fit actual road resistance, we selected the sum of sines, which is expressed as follows:
where
,
,
are fitting parameters that need to be updated periodically. As an example,
Figure 8 shows road resistance along the first predicted distance. It is evident that Equation (22) offers a reasonable approximation for the actual data.
Road altitude and vehicle speed results on the expressway are demonstrated in
Figure 9. Because the EC system updates every 0.1 s, all of the following results are described in time coordinates. As can be seen, all speeds were strictly constrained within limits. By correlating SMPC speed results with altitude in
Figure 9a, we can derive the following speed-planning features: acceleration before going uphill, deceleration during the uphill ascent, and acceleration during the downhill descent.
Compared to the MPC results, the speed trajectory of the GOC clearly shows a different amplitude. This is because the GOC forecasts the entire road, and DP is able to find possible optimal solutions. In addition, the GOC leads to a shorter travel time than that of other speed controllers.
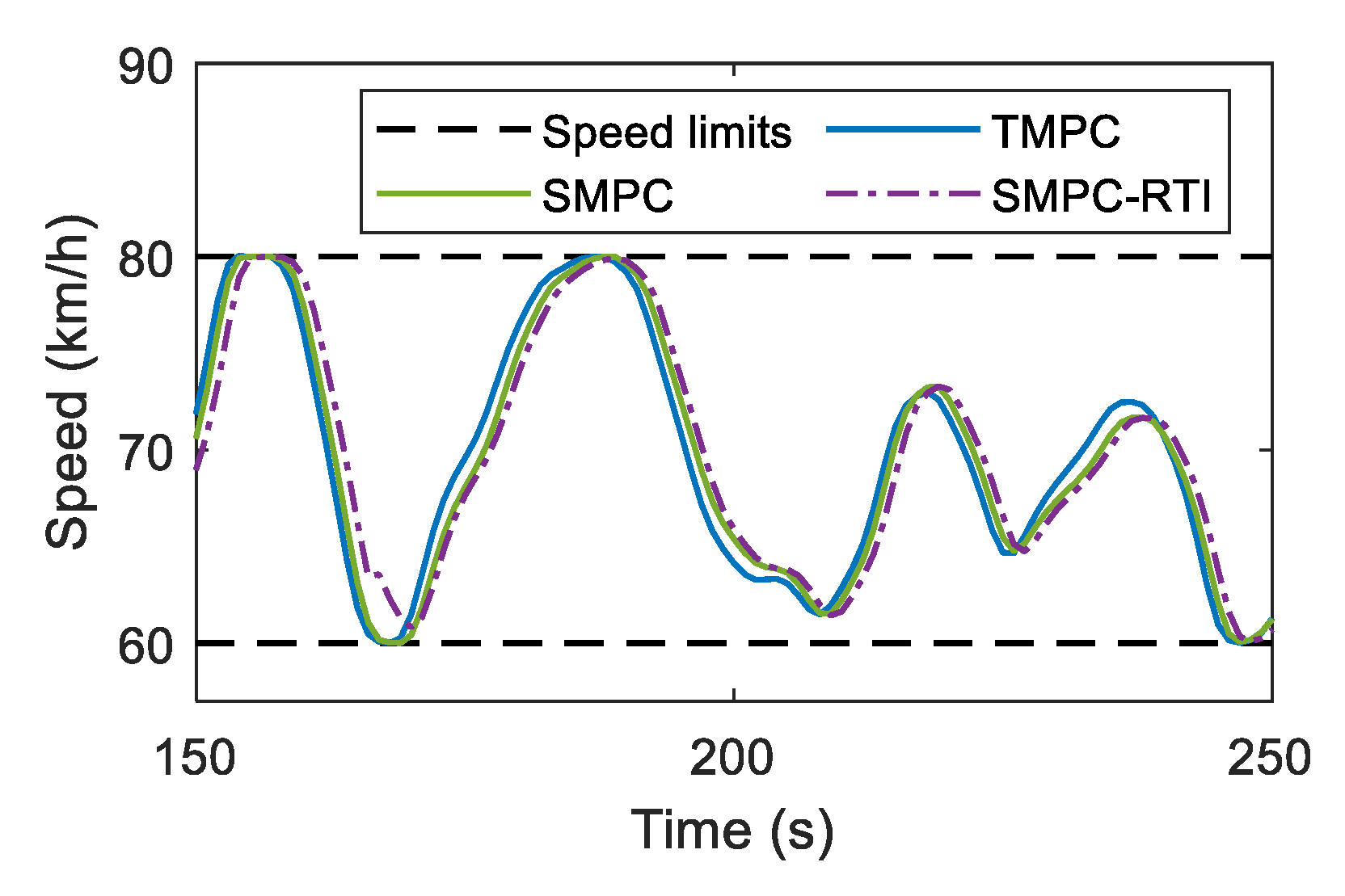
In
Figure 9b, it is evident that the three MPCs exhibited quite similar speed trajectories. A zoomed-in comparison of the three MPCs is illustrated in
Figure 10. It is evident that the SMPC-RTI exhibits close results to those of SMPC, which indicates that the proposed RTI maintains good solution quality.
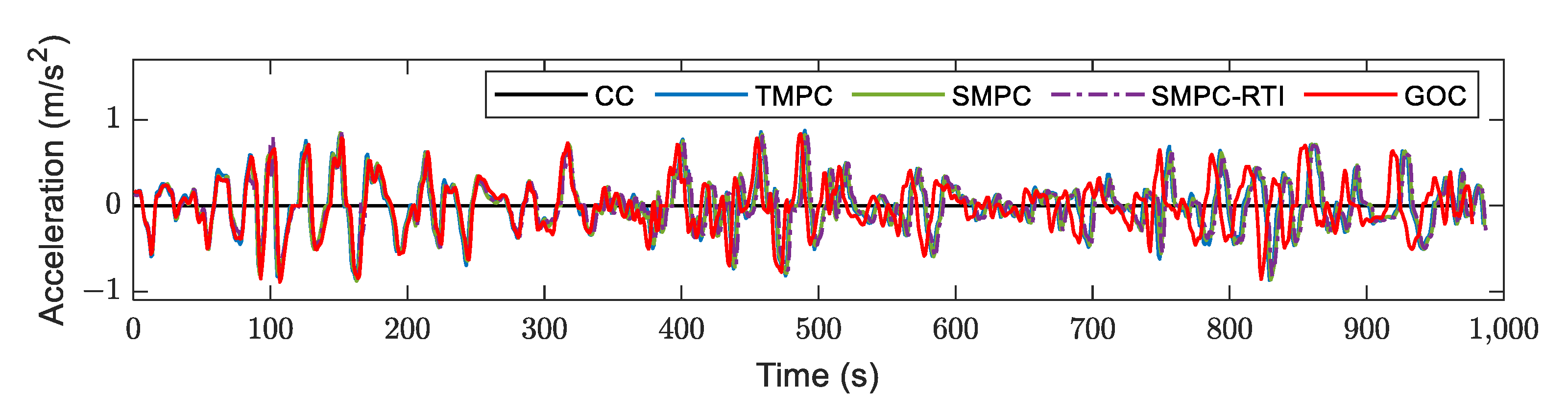
Figure 11 shows acceleration of all speed controllers. It can be seen from
Figure 11 that vehicle acceleration was controlled within [−1, 1] m/s
2, which ensured acceptable driving comfort for passengers.
Road altitude and results on the motorway are demonstrated in
Figure 12. As can be seen, all MPC controllers and GOCs exhibited similar speed and acceleration results. Since the terrain in
Figure 12a contains fewer hills than the terrain depicted in
Figure 9a, the speed regulation on the motorway appears smoother than that on the expressway. Moreover, although there was a wide range of flexibility available, the controllers only regulated speed between [69, 91] km/h. This indicates that maximizing speed band usage may not always be necessary for optimal performance.
4.2.2. Powertrain Results
This subsection presents powertrain results, obtained with the EC, that incorporated the high-level speed controller and the low-level powertrain controller. As a convenience, we have included only the expressway case in this subsection.
Figure 13 illustrates SOC and battery power. As the heuristic strategy cannot guarantee SOC equality strictly, initial SOC in each EC was manually determined.
Table 4 lists initial and terminal SOC of each controller; the two values are close to each other.
It is shown in
Figure 13a that, when compared to the EC that adopted the CC, the ECs that adopted other speed controllers revealed a different SOC pattern. Similar phenomena can be observed in
Figure 13b. Meanwhile, when speed was optimized, battery power trajectory appeared smoother.
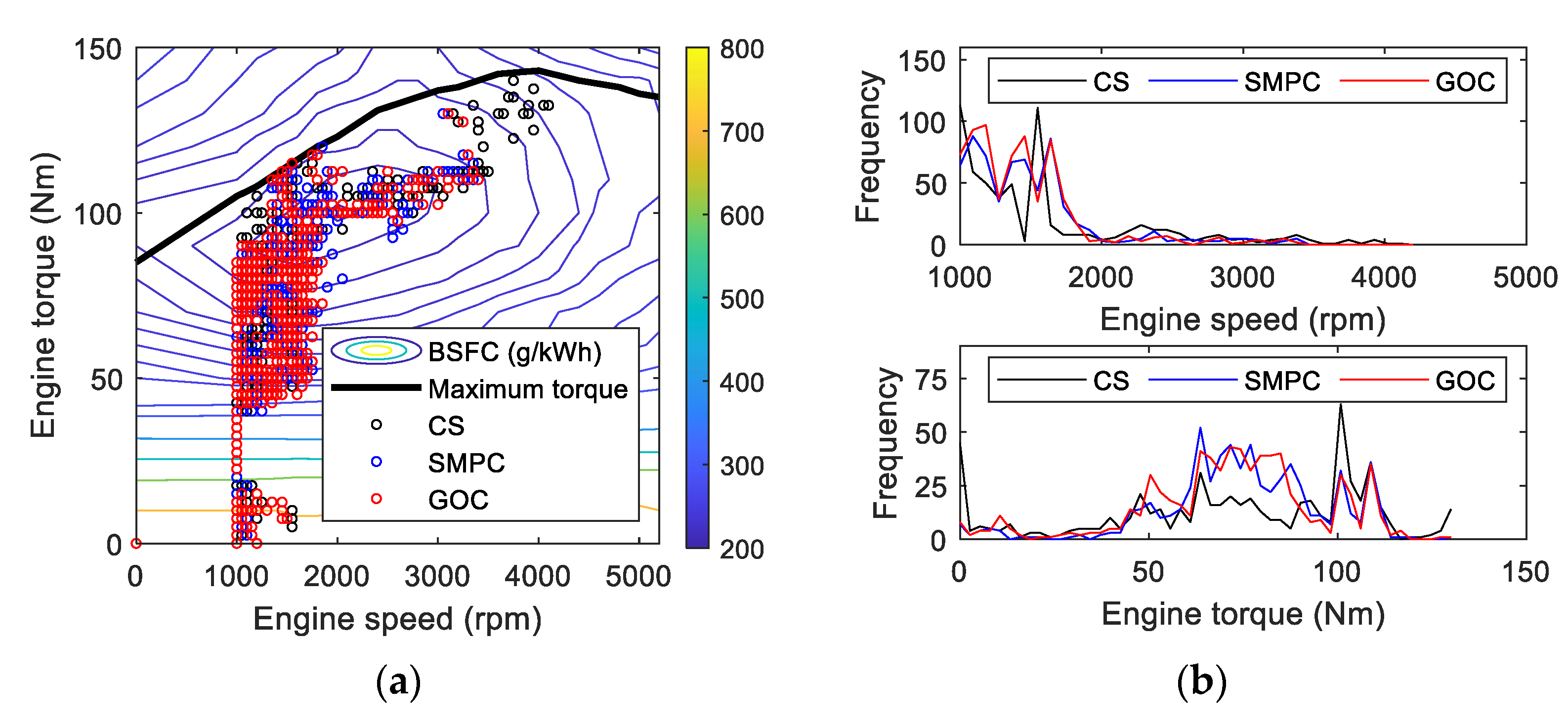
An illustration of the engine points distribution is shown in
Figure 14, along with a statistic regarding engine speed and torque.
It is clear from
Figure 14b that through incorporation of SMPC and the GOC, the EC allows more engine operation at low speeds ([1100, 1900] rpm) and medium torque ([50, 90] Nm), thereby increasing fuel efficiency.
4.2.3. Fuel-Consumption Evaluation
Table 5 presents performance of the EC using different speed controllers on the expressway. As shown in
Table 5, average speed in each group remained relatively close, as did SOC deviation. This contributed to fairness of the next fuel comparison. Using the CC, the EC consumed 558.22 g of fuel. Fuel consumption decreased significantly after other speed controllers were introduced. As compared to the CC, the GOC helped the EC save 8.06% of fuel. TMPC, SMPC, and SMPC-RTI also achieved fuel savings of 7.84%, 7.90%, and 7.68% for the EC, respectively. In conclusion, the proposed TMPC and SMPC provide suboptimal solutions to the speed-planning problem. Furthermore, the proposed RTI algorithm preserves quality of solution for NMPC.
Table 6 presents performance of the EC using different speed controllers on the motorway. In this case, the GOC assisted the EC in reducing fuel consumption by 4.30% compared to the CC. Furthermore, TMPC, SMPC, and SMPC-RTI achieved fuel savings of 4.32%, 4.30%, and 4.50% for the EC, respectively.
Please note that the fuel savings above are only attributed to the high-level speed controller. A further reduction in fuel consumption could be achieved via incorporation of advanced EM strategies into the low-level powertrain controller.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}