
Development of Harmonic Drive Combining Four Arcs for Conventional Kinematic Application
Abstract
:1. Introduction
2. Harmonic Cam Using Four-Arc Combination
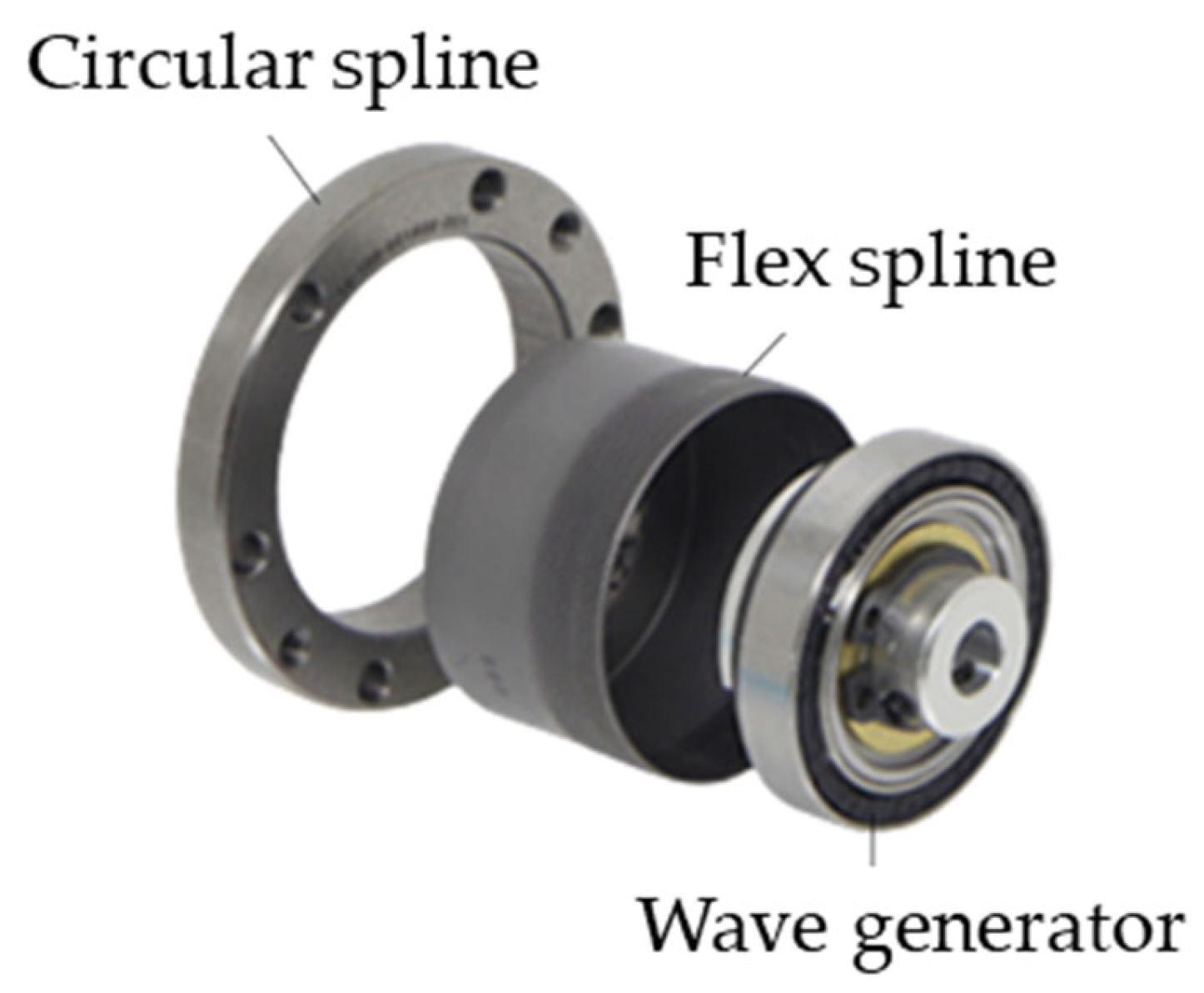
2.1. Kinetic Characteristics of Harmonic Drives
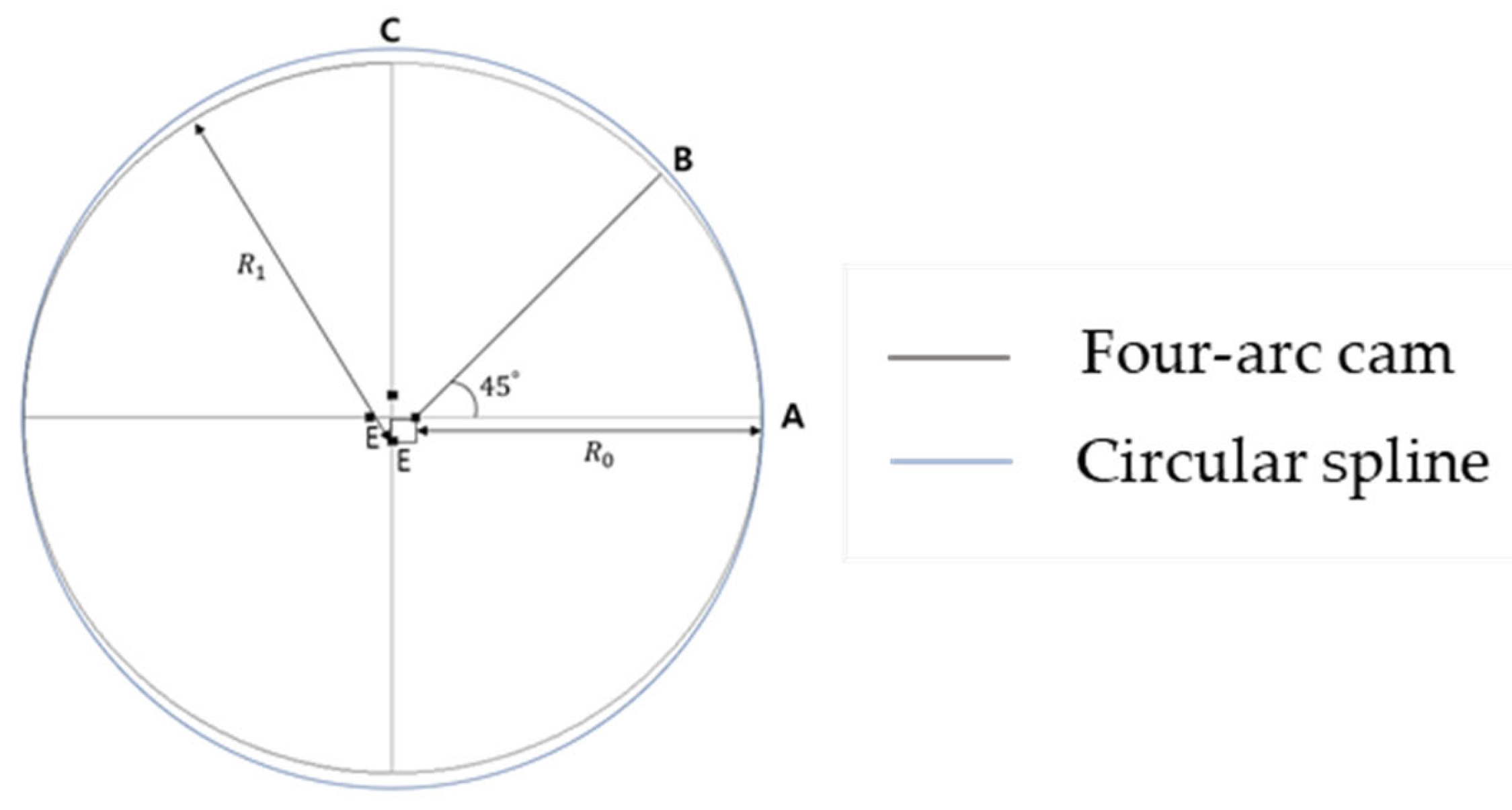
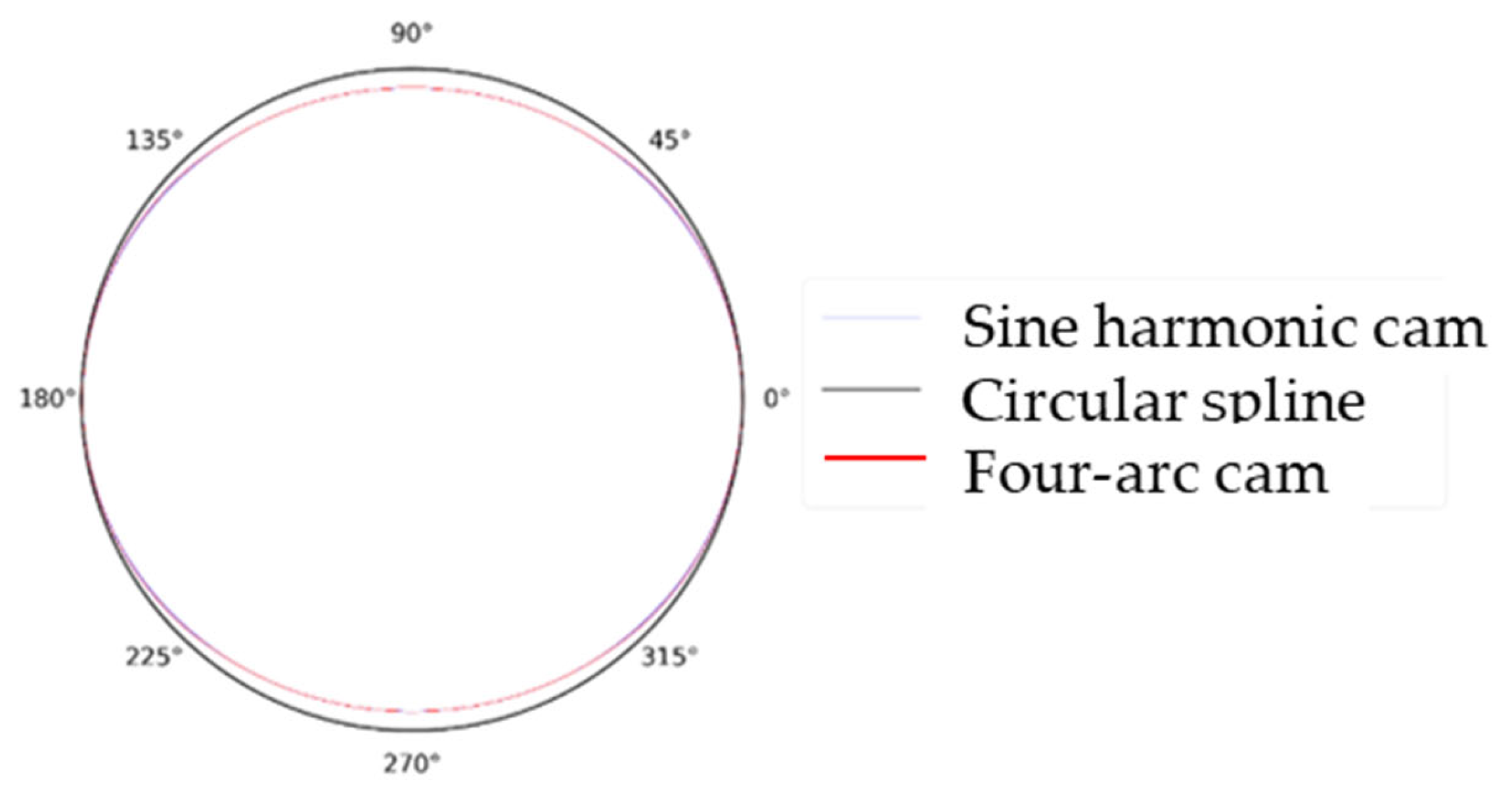
2.2. Four-Arc Combination Cam
3. Harmonic Drive Design Guide
3.1. Proposed Guide for Harmonic Drive Design with Cycloid Gear
- 1.
- Define the number ratio of lobes of the flex and circular splines,
- 2.
- DefineCalculate the equivalent number of teeth in Equation (18)
- 3.
- Define the neutral line diameter and offset =Calculate in Equation (9)Calculate the equivalent module in Equation (19)
- (1)
- Arc AB: Arrange teeth into the circumferential pitch
- (2)
- Arc BC: Arrange teeth into the circumferential pitchIf the teeth overlap in section B (Figure 6), arrange the teeth using Equation (20).where is the angle up to the last tooth arrangement of the B-point reference arc AB, and is the starting angle of the arrangement of arc BC based on point B.
3.2. Proposed Guide for Harmonic Drive Design with Involute Gear
- (1)
- Define the number ratio of lobes of the flex and circular splines,
- (2)
- DefineCalculate the equivalent number of teeth in Equation (18)
- (3)
- Define neutral line diameter and offset =Calculate in Equation (9)Calculate equivalent module in Equation (19)
- (4)
- Adjust the involute gearThe internal gear equation iswhere is the tool pressure angle, is the engagement pressure angle, are the profile shift coefficients, and are the number of lobeswhere E is the eccentricity.If the profile shifted gear is not used, becomesAccording to the harmonic drive design guide with the cycloid gear, is
4. Gear Design
5. Design of Harmonic Drive
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Musser, C.W. Strain Wave Gearing. U.S. Patent No. 2.906, 1959. [Google Scholar]
- Musser, C.W. Spline and Rotary Table. U.S. Patent No. 2,959,065, 1960. [Google Scholar]
- Musser, C.W. The harmonic drive. Mach. Des. 1960, 14, 160–173. [Google Scholar]
- Brighton, D.K. Harmonic Drives. U.S. Patent No. 3,996,816, 1976. [Google Scholar]
- Kayabasi, O.; Fehmi, E. Shape optimization of tooth profile of a flexspline for a harmonic drive by finite element modelling. Mater. Des. 2007, 28, 441–447. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y.; Xing, J.; Lin, S.; Ma, M. A novel method based on mechanical analysis for the stretch of the neutral line of the flexspline cup of a harmonic drive. Mech. Mach. Theory 2014, 76, 1–19. [Google Scholar] [CrossRef]
- Jeon, H.S.; Oh, S.H. A study on stress and vibration analysis of a steel and hybrid flexspline for harmonic drive. Compos. Struct. 1999, 47, 827–833. [Google Scholar] [CrossRef]
- Maiti, R. A Novel Harmonic Drive With Pure Involute Tooth Gear Pair. J. Mech. Des. 2004, 126, 178–182. [Google Scholar] [CrossRef]
- Bamnote, A.J.; Mahale, P.; Gulhane, R. Meshing Analysis of Teeth of Harmonic Drives: A Computer Based Approach; Dept. of Mechanical Engg., YC College of Engg.: Nagpur, India, 2000; pp. 1–8. [Google Scholar]
- Ishikawa, S. The gear geometry of tooth engagement in harmonic drive. Proceedings of [the JSME] 1967 Semi-international Symposium; 1967. [Google Scholar]
- Ishikawa, S. Tooth Profile of Spline of Strain Wave Gearing. U.S. Patent No. 4,823,638, 1989. [Google Scholar]
- Kiyosawa, Y. Performance of a strain wave gearing using a new tooth profile. In ASME International Power Transmission and Gearing Conference; American Society of Mechanical Engineers: New York, NY, USA, 1989; Volume 11, p. 607. [Google Scholar]
- Xin, H.B.; Mo, H.N.; Gao, J.C.; Wang, W.J.; Cui, D.Q.; Liu, L.; Wang, T.; Xin, Y.F. Study on the Gear Tooth Influence Coefficients of Flexspline of Harmonic Drive. Adv. Mater. Res. 2013, 774–776, 144–147. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y.; Xing, J.; Lin, S.; Xu, W. The parametric design of double-circular-arc tooth profile and its influence on the functional backlash of harmonic drive. Mech. Mach. Theory 2014, 73, 1–24. [Google Scholar] [CrossRef]
- Dong, H.; Ting, K.-L.; Wang, D. Kinematic Fundamentals of Planar Harmonic Drives. J. Mech. Des. 2011, 133, 011007. [Google Scholar] [CrossRef]
- Sahoo, V.; Maiti, R. Load sharing by tooth pairs in involute toothed harmonic drive with conventional wave generator cam. Meccanica 2018, 53, 373–394. [Google Scholar] [CrossRef]
- Song, C.; Li, X.; Yang, Y.; Sun, J. Parameter design of double-circular-arc tooth profile and its influence on meshing characteristics of harmonic drive. Mech. Mach. Theory 2021, 167, 104567. [Google Scholar] [CrossRef]
- Wang, S.; Li, D.; Mao, S.; Chen, B. Design and Analysis of Cam Wave Generator Based on Free Deformation in Non-Working Area of the Flexspline. Appl. Sci. 2021, 11, 6049. [Google Scholar] [CrossRef]
- Gravagno, F.; Mucino, V.H.; Pennestrì, E. Influence of wave generator profile on the pure kinematic error and centrodes of harmonic drive. Mech. Mach. Theory 2016, 104, 100–117. [Google Scholar] [CrossRef]
- Li, X.; Song, C.; Yang, Y.; Zhu, C.; Liao, D. Optimal design of wave generator profile for harmonic gear drive using support function. Mech. Mach. Theory 2020, 152, 103941. [Google Scholar] [CrossRef]
- Mahanto, B.S.; Sahoo, V.; Maiti, R. Effect of Cam Insertion on Stresses in Harmonic Drive in Industrial Robotic Joints. Procedia Comput. Sci. 2018, 133, 432–439. [Google Scholar] [CrossRef]
- Jia, H.; Li, J.; Xiang, G.; Wang, J.; Xiao, K.; Han, Y. Modeling and analysis of pure kinematic error in harmonic drive. Mech. Mach. Theory 2020, 155, 104122. [Google Scholar] [CrossRef]
- Lee, C.W.; Oh, S.H.; Kim, J.C.; Jeon, H.S. Development of Harmonic Drive Using Cycloide Tooth Profile. Trans. Korean Soc. Mech. Eng. A 1997, 21, 1166–1173. [Google Scholar]
- Jang, D.-J.; Kim, Y.-C.; Hong, E.-P.; Kim, G.-S. Geometry design and dynamic analysis of a modified cycloid reducer with epitrochoid tooth profile. Mech. Mach. Theory 2021, 164, 104399. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Input data | Lobes of circular spline, | 74 |
| Lobes of flex spline, | 72 | |
| Deviation coefficient, | 0.99 | |
| Diameter of flex spline, (mm) | 100 | |
| Offset distance, (mm) | 1 | |
| Results | Radii , (mm) | 47.8876 |
| Radii , (mm) | 52.1124 | |
| Eccentricity distance, (mm) | 2.9874 | |
| Module, | 1.4179 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, T.; Lee, J.; Jeong, W.; Jeon, H.; Oh, S. Development of Harmonic Drive Combining Four Arcs for Conventional Kinematic Application. Machines 2022, 10, 1058. https://doi.org/10.3390/machines10111058
Kim T, Lee J, Jeong W, Jeon H, Oh S. Development of Harmonic Drive Combining Four Arcs for Conventional Kinematic Application. Machines. 2022; 10(11):1058. https://doi.org/10.3390/machines10111058
Chicago/Turabian StyleKim, Taesu, Jongseok Lee, Wonhyeong Jeong, Hansu Jeon, and Sehoon Oh. 2022. "Development of Harmonic Drive Combining Four Arcs for Conventional Kinematic Application" Machines 10, no. 11: 1058. https://doi.org/10.3390/machines10111058