
A Hierarchical Energy Management Strategy for 4WD Plug-In Hybrid Electric Vehicles
Abstract
:1. Introduction
- A hierarchical structure of the energy management strategy, namely, the H-EMS for a 4WD PHEV, is used for suitably separating the complexity of energy management, leading to obtaining the reasonable sequence of control variables to release the energy-saving potential of the 4WD PHEV with multiple degrees of power freedom.
- The MPC is used for establishing the high-level framework of the H-EMS to solve the separated problem of energy management, aiming at reasonably distributing the power between engine and battery and decreasing the number of control variables to meet the calculating capacity of the vehicle controller.
- The ECMS is adopted to establish the low-level framework of the H-EMS to innovatively solve the subproblem of energy management with regard to the distribution of electricity, aiming at obtaining a suitable distribution between the motor in the front axle and rear axle.
2. Models
2.1. The Studied 4WD PHEV
2.2. Vehicle Dynamics Model
2.3. Engine Model
2.4. Motor/Generator Model
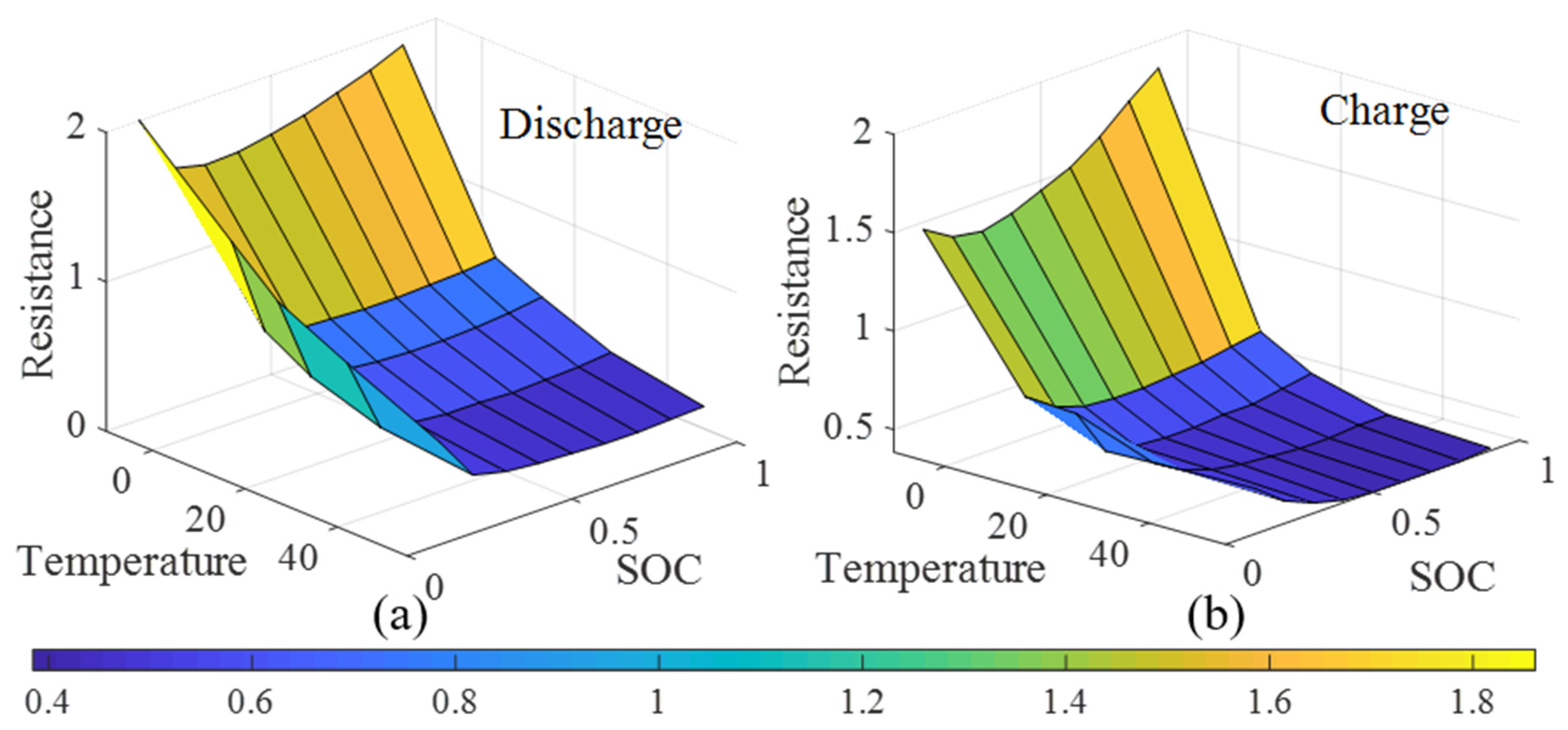
2.5. Battery Model
3. Methodology
3.1. Vehicle Speed Prediction Based on GRNN
3.2. Optimal Management of Power Sources Based on MPC
3.3. Optimal Management of Power Components between the Front Motor and the Rear Motor Based on ECMS
4. Simulation Results and Analysis
4.1. Comparison and Analysis of Predictive Speed
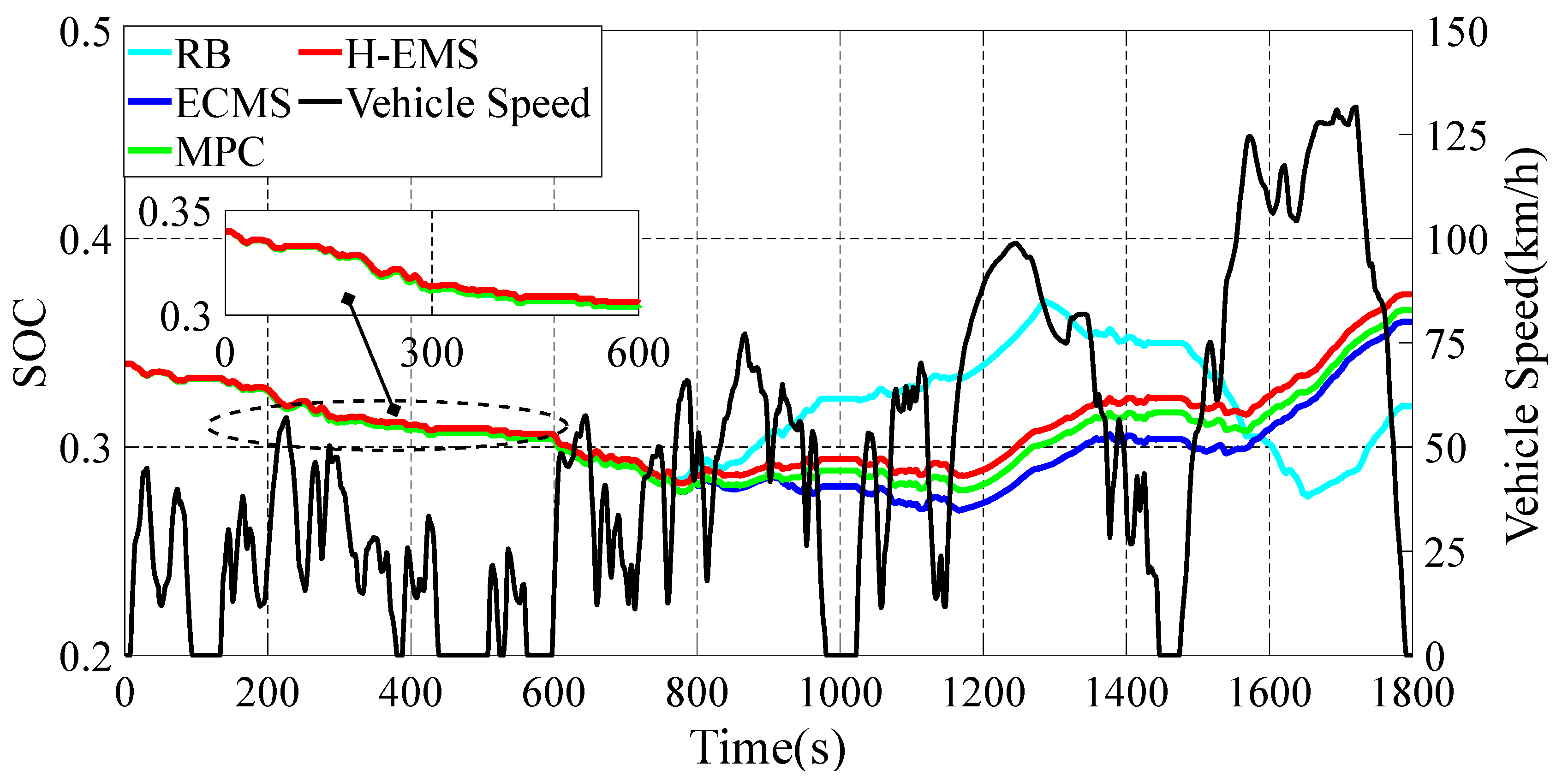
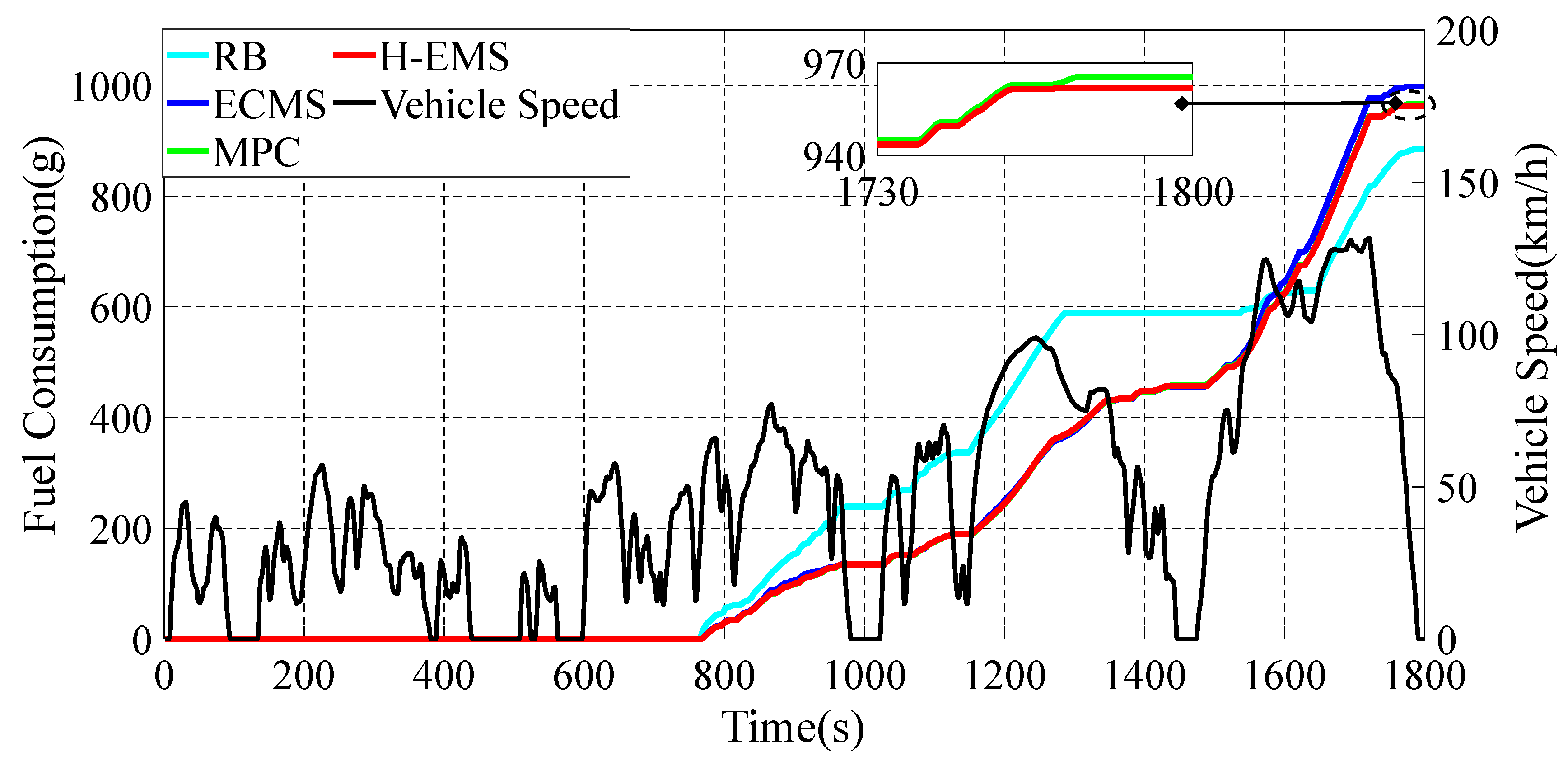
4.2. Comparison and Analysis of SOC, Fuel Consumption, and Equivalent Fuel Consumption
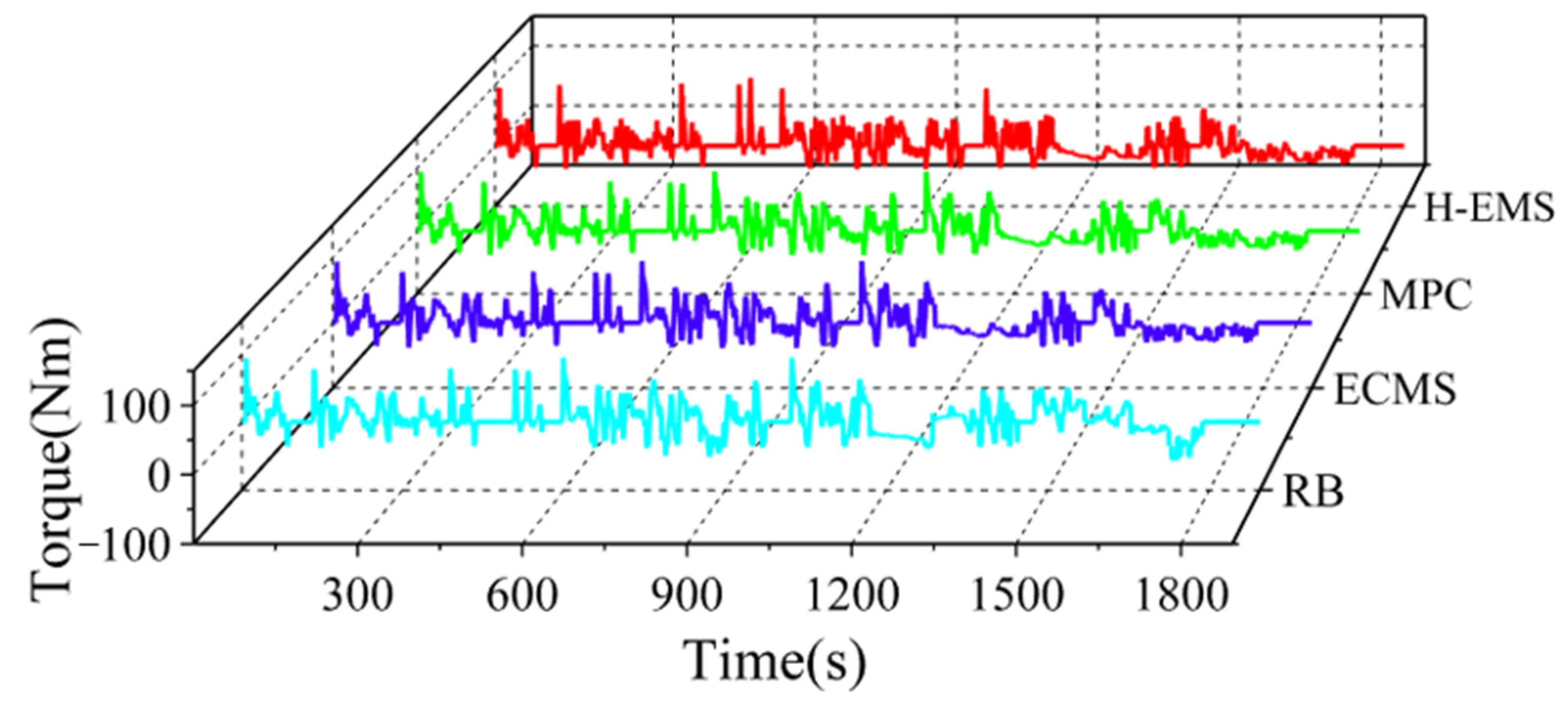
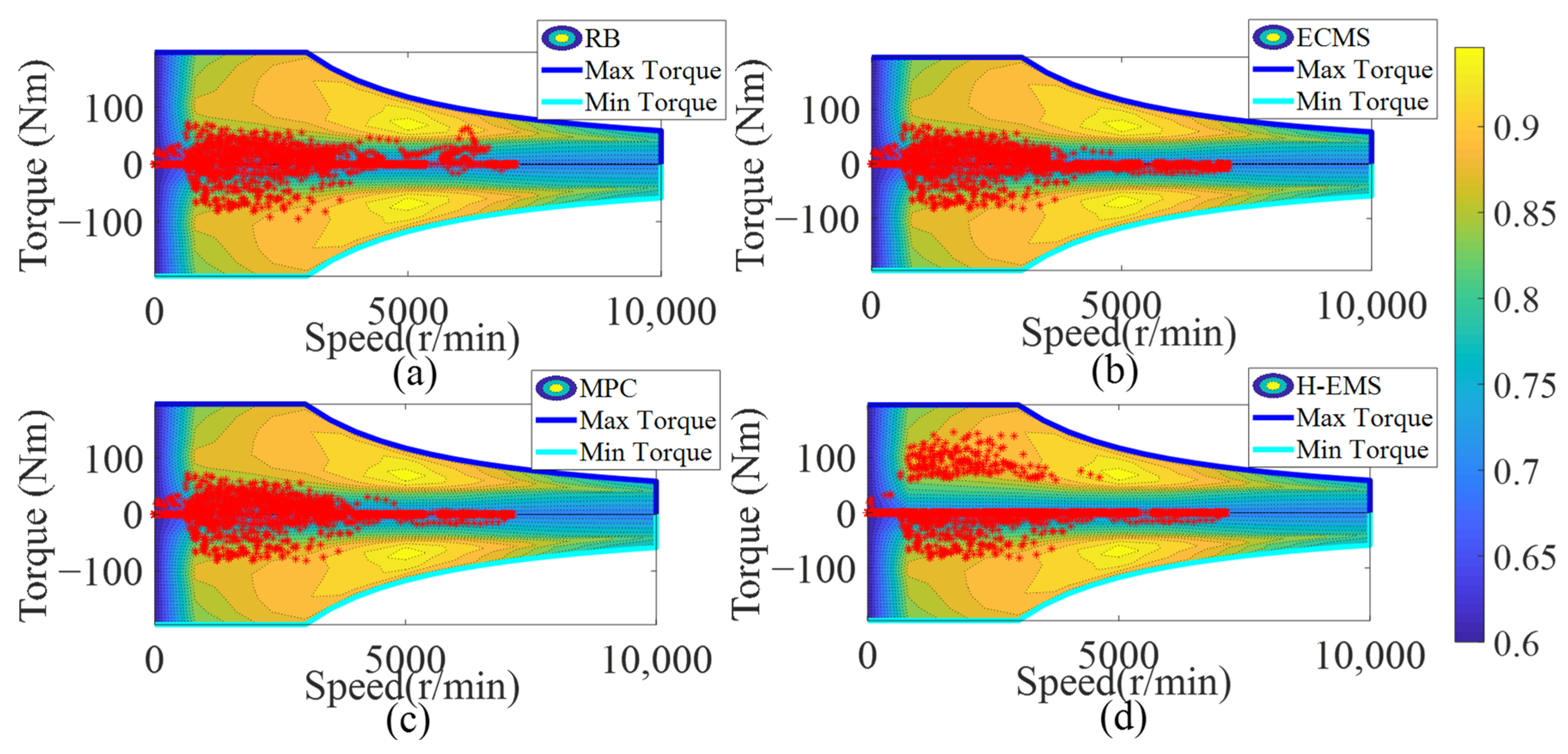
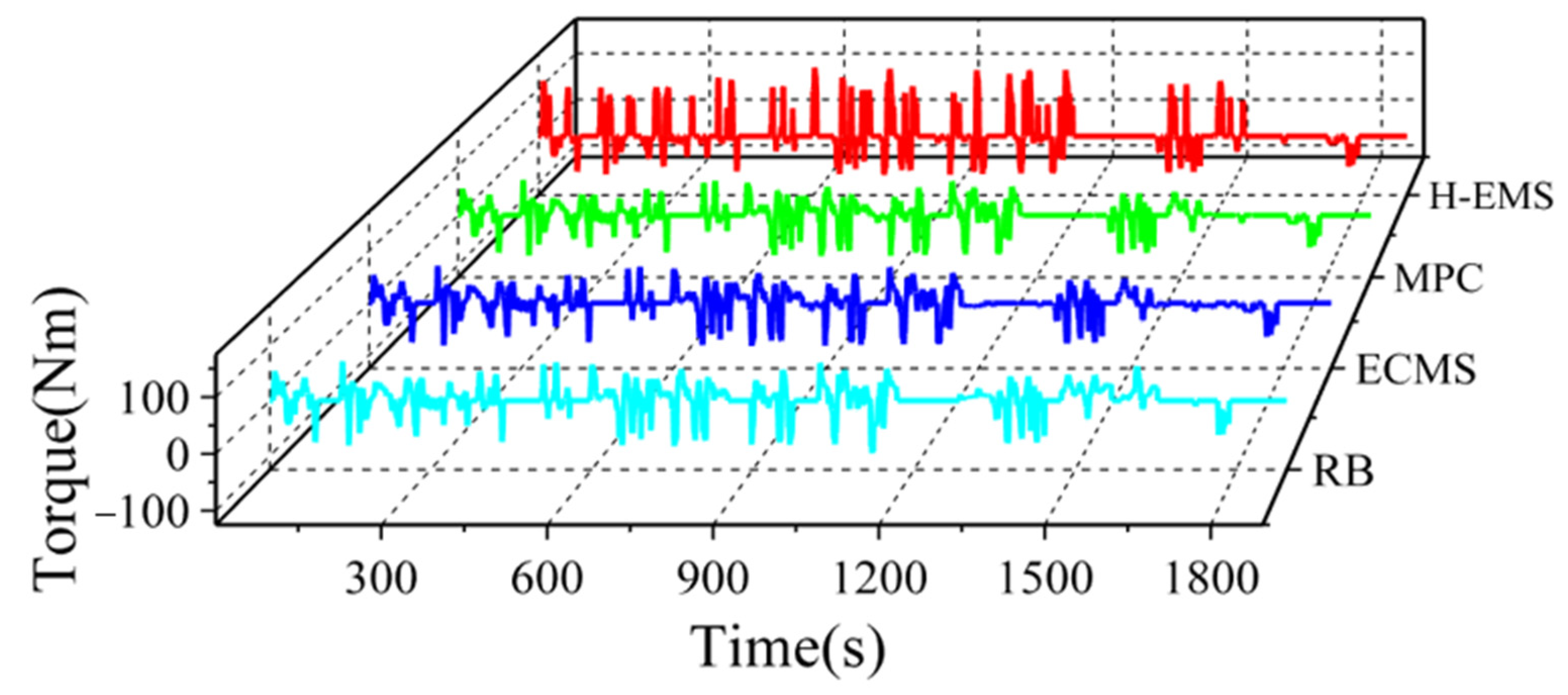
4.3. Qualitative Comparison and Analysis of Component Performance
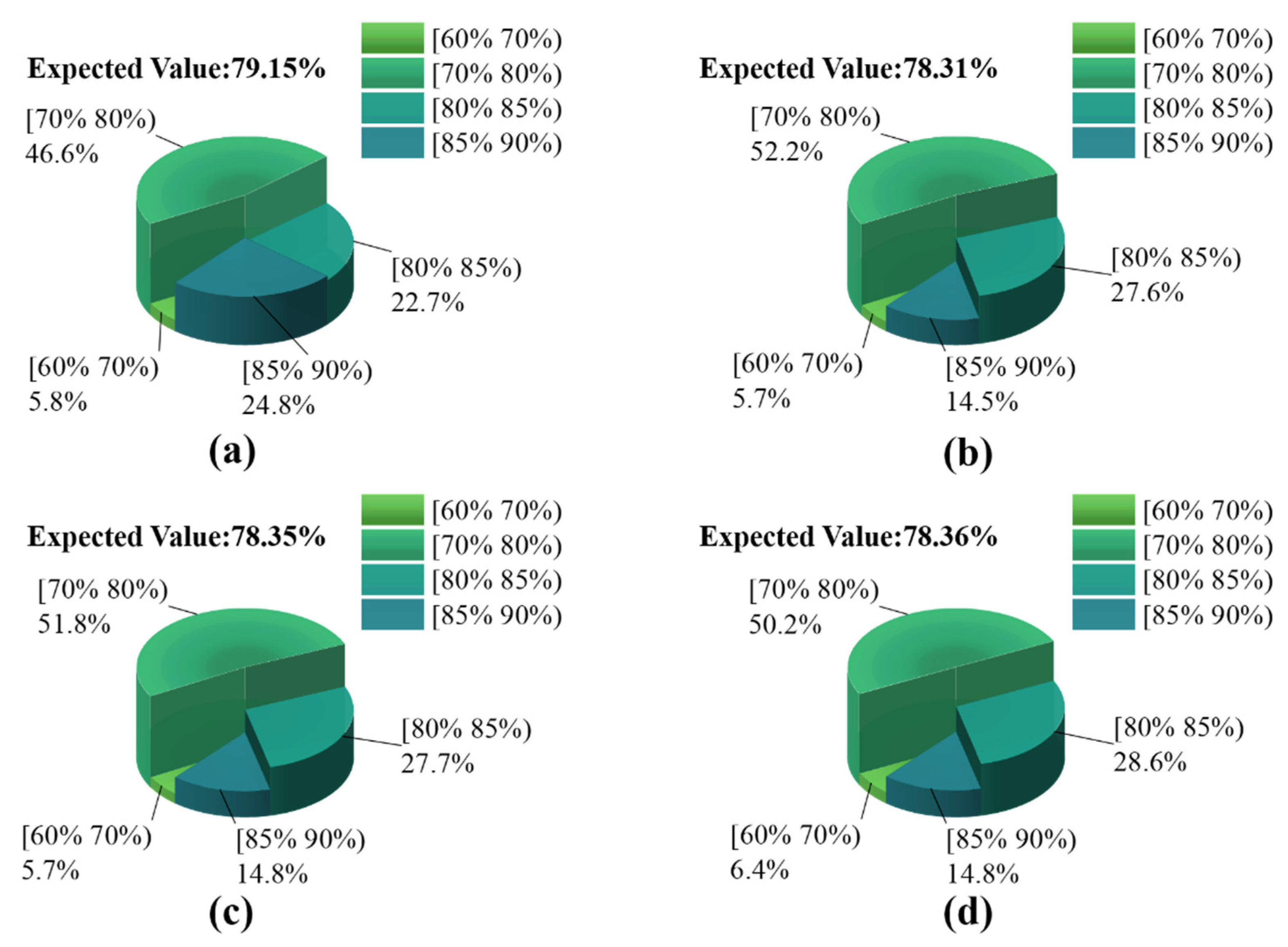
4.4. Quantitative Comparison and Analysis of Component Performance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mohr, S.H.; Ward, J.; Ellem, G.; Giurco, D. Projection of world fossil fuels by country. Fuel 2015, 141, 120–135. [Google Scholar] [CrossRef]
- West, J.G.W. DC, induction, reluctance and pm motors for electric vehicles. Power Eng. J. 1994, 77, 77–88. [Google Scholar] [CrossRef]
- Wyczalek, F.A. Hybrid electric vehicles: Year 2000 status. IEEE Aerosp. Electron. Syst. Mag. 2001, 16, 15–25. [Google Scholar] [CrossRef]
- Zeng, Y.; Cai, Y.; Kou, G.; Gao, W.; Qin, D. Energy Management for Plug-In Hybrid Electric Vehicle Based on Adaptive Simplified-ECMS. Sustainability 2018, 10, 2060. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Zha, M.; Wang, W.; Liu, K.; Xiang, C. Efficient energy management strategy for hybrid electric vehicles/plug-in hybrid electric vehicles: Review and recent advances under intelligent transportation system. IET Intell. Transp. Syst. 2020, 14, 702–711. [Google Scholar] [CrossRef]
- Zhang, Y.; Chu, L.; Fu, Z.; Xu, N.; Guo, C.; Zhang, X.; Chen, Z.; Wang, P. Optimal energy management strategy for parallel plug-in hybrid electric vehicle based on driving behavior analysis and real time traffic information prediction. Mechatronics 2017, 46, 177–192. [Google Scholar] [CrossRef]
- Wu, G.; Boriboonsomsin, K.; Barth, M. Development and Evaluation of Intelligent Energy Management Strategy for Plug-in Hybrid Electric Vehicle. In Proceedings of the Transportation Research Board Meeting, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Deng, T.; Lu, R.; Li, Y.; Lin, C. Adaptive energy control strategy of hev based on driving cycle recognition by lvq algorithm. China Mech. Eng. 2016, 27, 420. [Google Scholar]
- Wang, Y.; Qian, L.; Niu, L. Multi-objective optimization of control strategies for four-wheel drive phev based on immune algorithm. China Mech. Eng. 2017, 28, 1683. [Google Scholar]
- Bayindir, K.A.; Gözüküçük, M.A.; Teke, A. A comprehensive overview of hybrid electric vehicle: Powertrain configurations, powertrain control techniques and electronic control units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Zhang, B.; Mi, C.; Zhang, M. Charge-depleting control strategies and fuel optimization of blended-mode plug-in hybrid electric vehicles. IEEE Trans. Veh. Technol. 2011, 60, 1516–1525. [Google Scholar] [CrossRef]
- Mirko, S.; Rashad, M.; Benjamin, T.; Peter, E.; Ferit, K. Energy management in a parallel hybrid electric vehicle for different driving conditions. SAE Int. J. Altern. Powertrains 2014, 3, 193–212. [Google Scholar]
- Ahn, K.; Papalambros, P.Y. Engine optimal operation lines for power-split hybrid electric vehicles. Proceedings of the Institution of Mechanical Engineers. Part D J. Automob. Eng. 2009, 223, 1149–1162. [Google Scholar] [CrossRef]
- Chen, J.; Xu, C.; Wu, C.; Xu, W. Adaptive fuzzy logic control of fuel-cell-battery hybrid systems for electric vehicles. IEEE Trans. Ind. Inform. 2016, 14, 292–300. [Google Scholar] [CrossRef]
- Xu, Q.; Luo, X.; Jiang, X.; Zhao, M. Research on double fuzzy control strategy for parallel hybrid electric bus. In Advanced Computational Methods in Energy, Power, Electric Vehicles, and Their Integration; Springer: Singapore, 2017. [Google Scholar]
- Zi, X.; Du, C.; Zhang, Z.; Yan, F. Fuzzy Logic-Based Energy Management Strategies for Hybrid Electric Vehicles. J. Wuhan Univ. Technol. (Inf. Manag. Eng.) 2008, 133, 200–205. [Google Scholar]
- Lempert, J.; Vadala, B.; Arshad-Aliy, K.; Roeleveld, J.; Emadi, A. Practical Considerations for the Implementation of Dynamic Programming for HEV Powertrains. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 755–760. [Google Scholar]
- Chen, Z.; Mi, C.C.; Xu, J.; Gong, X.; You, C. Energy management for a power-split plug-in hybrid electric vehicle based on dynamic programming and neural networks. IEEE Trans. Veh. Technol. 2014, 63, 1567–1580. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R. Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming. Appl. Energy 2015, 155, 68–78. [Google Scholar] [CrossRef]
- Zhang, N.; Ma, X.; Jin, L. Energy management for parallel HEV based on PMP algorithm. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017. [Google Scholar]
- Lee, W.; Jeoung, H.; Park, D.; Kim, N. An adaptive concept of pmp-based control for saving operating costs of extended-range electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 11505–11512. [Google Scholar] [CrossRef]
- Wu, T.; Ding, Y.; Xu, Y. Energy optimal control strategy of phev based on pmp algorithm. J. Control Sci. Eng. 2017, 2017, 6183729. [Google Scholar] [CrossRef] [Green Version]
- Rezaei, A.; Burl, J.B.; Solouk, A.; Zhou, B.; Rezaei, M.; Shahbakhti, M. Catch energy saving opportunity (ceso), an instantaneous optimal energy management strategy for series hybrid electric vehicles. Appl. Energy 2017, 208, 655–665. [Google Scholar] [CrossRef]
- Wu, J.; Ruan, J.; Zhang, N.; Walker, P.D. An optimized real-time energy management strategy for the power-split hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2018, 27, 1194–1202. [Google Scholar] [CrossRef]
- Wang, J.; Jiao, Z. Energy management strategy of four-wheel drive hybrid electric vehicle based on ecms algorithm. DEStech Trans. Environ. Energy Earth Sci. (Iceee) 2019, 2475–8833. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Xin, Z.; Li, L. Time-efficient stochastic model predictive energy management for a plug-in hybrid electric bus with adaptive reference state-of-charge advisory. IEEE Trans. Veh. Technol. 2018, 67, 5671–5682. [Google Scholar] [CrossRef]
- Guo, L.; Gao, B.; Ying, G.; Hong, C. Optimal energy management for hevs in eco-driving applications using bi-level mpc. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2153–2162. [Google Scholar] [CrossRef]
- Sun, C.; Moura, S.J.; Hu, X.; Hedrick, J.K.; Sun, F. Dynamic traffic feedback data enabled energy management in plug-in hybrid electric vehicles. IEEE Trans. Control. Syst. Technol. 2015, 23, 1075–1086. [Google Scholar]
- Zeng, Y.; Jing, S.; Ming, L. Adaptive real-time energy management strategy for plug-in hybrid electric vehicle based on simplified-ecms and a novel driving pattern recognition method. Math. Probl. Eng. 2018, 2018, 5816861. [Google Scholar] [CrossRef]
- Xie, S.; Chen, H.; Liu, T.; Wei, L. A research on energy management strategy for a plug-in hybrid electric bus based on dp-ecms strategy. Qiche Gongcheng/Automot. Eng. 2017, 39, 736–741, 781. [Google Scholar]
- Li, J.; Liu, Y.; Qin, D.; Li, G.; Chen, Z. Research on equivalent factor boundary of equivalent consumption minimization strategy for phevs. IEEE Trans. Veh. Technol. 2020, 69, 6011–6024. [Google Scholar] [CrossRef]
- Zhou, W.; Chen, Y.; Zhai, H.; Zhang, N. Predictive energy management for a plug-in hybrid electric vehicle using driving profile segmentation and energy-based analytical soc planning. Energy 2020, 220, 119700. [Google Scholar] [CrossRef]
- Lian, J.; Liu, S.; Li, L.; Liu, X.; Zhou, Y.; Yang, F.; Yuan, L. A Mixed Logical Dynamical-Model Predictive Control (MLD-MPC) Energy Management Control Strategy for Plug-in Hybrid Electric Vehicles (PHEVs). Energies 2017, 10, 74. [Google Scholar] [CrossRef]
- Guo, J.; He, H.; Peng, J.; Zhou, N. A novel mpc-based adaptive energy management strategy in plug-in hybrid electric vehicles. Energy 2019, 175, 378–392. [Google Scholar]
- Qiu, L.; Qian, L.; Zomorodi, H. Global optimal energy management control strategies for connected four-wheel-drive hybrid electric vehicles. Iet Intell. Transp. Syst. 2017, 11, 264–272. [Google Scholar] [CrossRef]
- Ju, F.; Zhuang, W.; Wang, L.; Zhang, Z. Optimal sizing and adaptive energy management of a novel four-wheel-drive hybrid powertrain. Energy 2019, 187, 116008. [Google Scholar] [CrossRef]
- Qiu, L.H.; Qian, L.J.; Hesam, Z.; Pierluigi, P. Design and optimization of equivalent consumption minimization strategy for 4wd hybrid electric vehicles incorporating vehicle connectivity. Sci. China Technol. Sci. 2018, 61, 147–157. [Google Scholar] [CrossRef]
- Ju, F.; Zhuang, W.; Wang, L.; Jiang, Y. A novel four-wheel-drive hybrid electric sport utility vehicle with double planetary gears. IFAC-Pap. 2018, 51, 81–86. [Google Scholar] [CrossRef]
- Nguyen, C.T.P.; Nguyễn, B.H.; Trovão, J.P.F.; Ta, M.C. Optimal drivetrain design methodology for enhancing dynamic and energy performances of dual-motor electric vehicles. Energy Convers. Manag. 2021, 252, 115054. [Google Scholar] [CrossRef]
- Santini, S. Distributed nonlinear model predictive control for connected autonomous electric vehicles platoon with distance-dependent air drag formulation. Energies 2021, 14, 5122. [Google Scholar]
- Maia, R.; Silva, M.; Araujo, R.; Nunes, U. Electrical vehicle modeling: A fuzzy logic model for regenerative braking. Expert Syst. Appl. 2015, 42, 8504–8519. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Vehicle curb weight | kg | 1860 |
| Vehicle weight | kg | 2370 |
| Vehicle maximum velocity | km/h | 170 |
| Wheel rolling radius | m | 0.35 |
| Frontal area | m2 | 2 |
| Engine maximum power | kW @ rpm | 110 @ 5200 |
| Engine maximum torque | Nm @ rpm | 200 @ 5200 |
| Front motor maximum power | kW | 60 |
| Front motor maximum torque | Nm | 137 |
| Rear motor maximum power | kW | 61 |
| Rear motor maximum torque | Nm | 195 |
| Battery capacity | kWh | 15 |
| Battery rated voltage | V | 300 |
| Transmission Ratio Parameters | Value |
|---|---|
| Front axle engine transmission ratio | = 3.425 |
| Front axle motor transmission ratio | = 9.663 |
| Rear axle motor transmission ratio | = 7.065 |
| Front axle engine-generator transmission ratio | = 2.736 |
| Operating Modes | Illustration |
|---|---|
| Pure electric mode | The battery provides all the power for the front/rear motors to drive the vehicle, and the engine and generator are in shutdown state. |
| Series mode | The engine drives the generator to provide electric energy for the front/rear motors, and the battery also provides electric energy output. |
| Parallel mode | The clutch is closed, and the engine directly drives the vehicle. The front/rear motors assist the engine to drive the vehicle. |
| Method | Error Type | Future_1 s | Future_2 s | Future_3 s | Future_4 s | Future_5 s |
|---|---|---|---|---|---|---|
| RF | RMSE | 0.5485 | 1.8764 | 3.5222 | 5.0659 | 6.4615 |
| MSE | 0.3009 | 3.5208 | 12.4060 | 25.6625 | 41.7512 | |
| MAE | 0.1925 | 1.4398 | 2.6971 | 3.9259 | 5.0814 | |
| SVM | RMSE | 0.5480 | 1.2754 | 2.5912 | 3.7971 | 4.8743 |
| MSE | 0.3003 | 1.6266 | 6.7142 | 14.4183 | 23.7588 | |
| MAE | 0.3543 | 1.5684 | 2.8285 | 4.0516 | 5.1991 | |
| GRNN | RMSE | 0.5461 | 1.2748 | 2.5959 | 3.8034 | 4.8855 |
| MSE | 0.2982 | 1.6252 | 6.7387 | 14.4660 | 23.8681 | |
| MAE | 0.3560 | 1.5670 | 2.8274 | 4.0497 | 5.1976 |
| Control Strategy | Fuel Consumption (g) | Terminal SOC | Equivalent Fuel Consumption (g) | Economy (Relative to RB) |
|---|---|---|---|---|
| RB | 884.4 | 0.320 | 972.7 | |
| ECMS | 997.9 | 0.360 | 897.6 | 7.72% |
| MPC | 965.5 | 0.366 | 888.0 | 8.71% |
| H-CMS | 962.0 | 0.373 | 857.2 | 11.87% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Guo, J.; Chu, L.; Guo, C.; Hu, J.; Hou, Z. A Hierarchical Energy Management Strategy for 4WD Plug-In Hybrid Electric Vehicles. Machines 2022, 10, 947. https://doi.org/10.3390/machines10100947
Guo Z, Guo J, Chu L, Guo C, Hu J, Hou Z. A Hierarchical Energy Management Strategy for 4WD Plug-In Hybrid Electric Vehicles. Machines. 2022; 10(10):947. https://doi.org/10.3390/machines10100947
Chicago/Turabian StyleGuo, Zhiqi, Jianhua Guo, Liang Chu, Chong Guo, Jincheng Hu, and Zhuoran Hou. 2022. "A Hierarchical Energy Management Strategy for 4WD Plug-In Hybrid Electric Vehicles" Machines 10, no. 10: 947. https://doi.org/10.3390/machines10100947