

Horizontal Bi-Stable Vibration Energy Harvesting Using Electromagnetic Induction and Power Generation Efficiency Improvement via Stochastic Resonance


Abstract
:1. Introduction
2. Material and Method
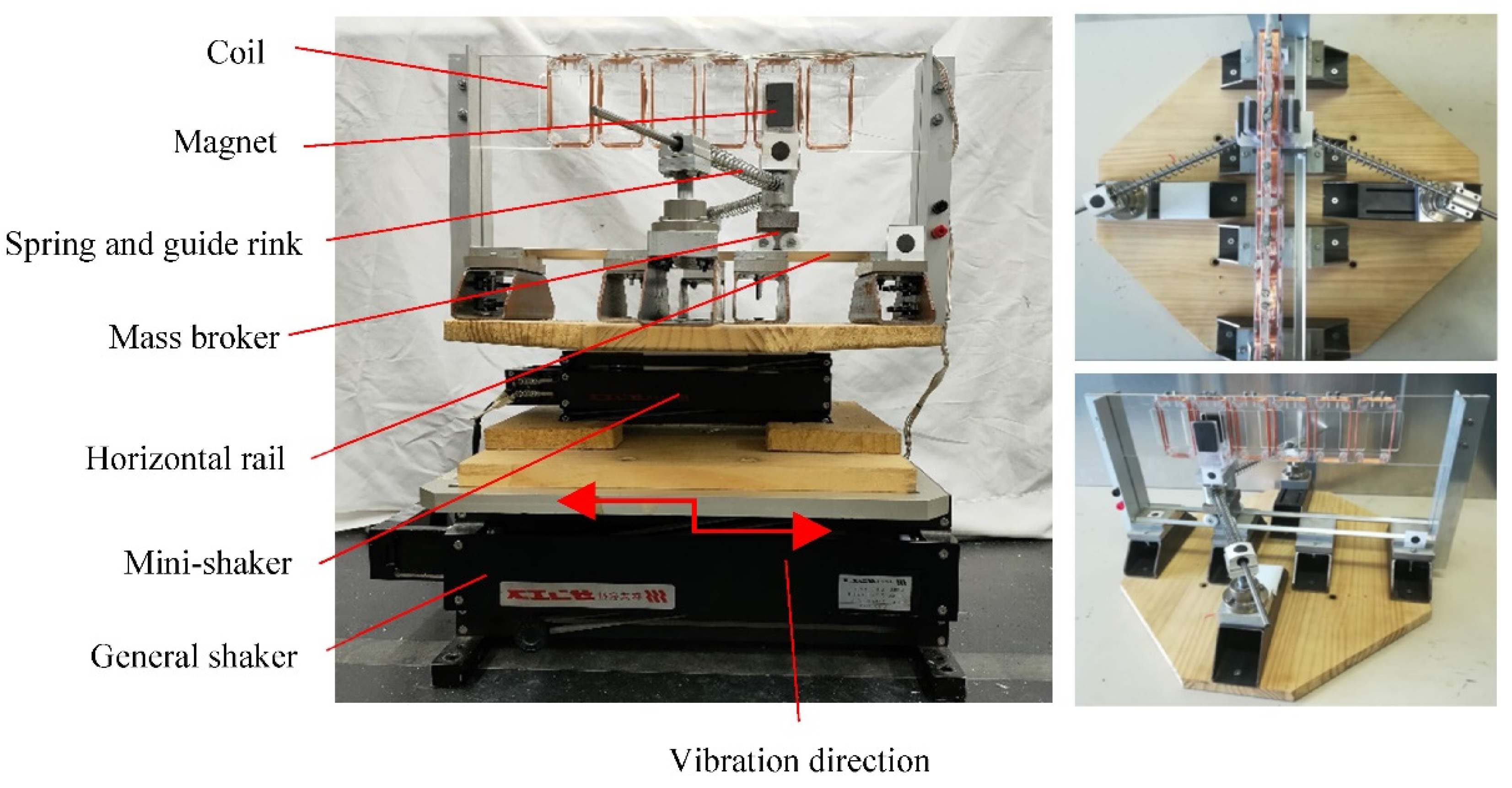
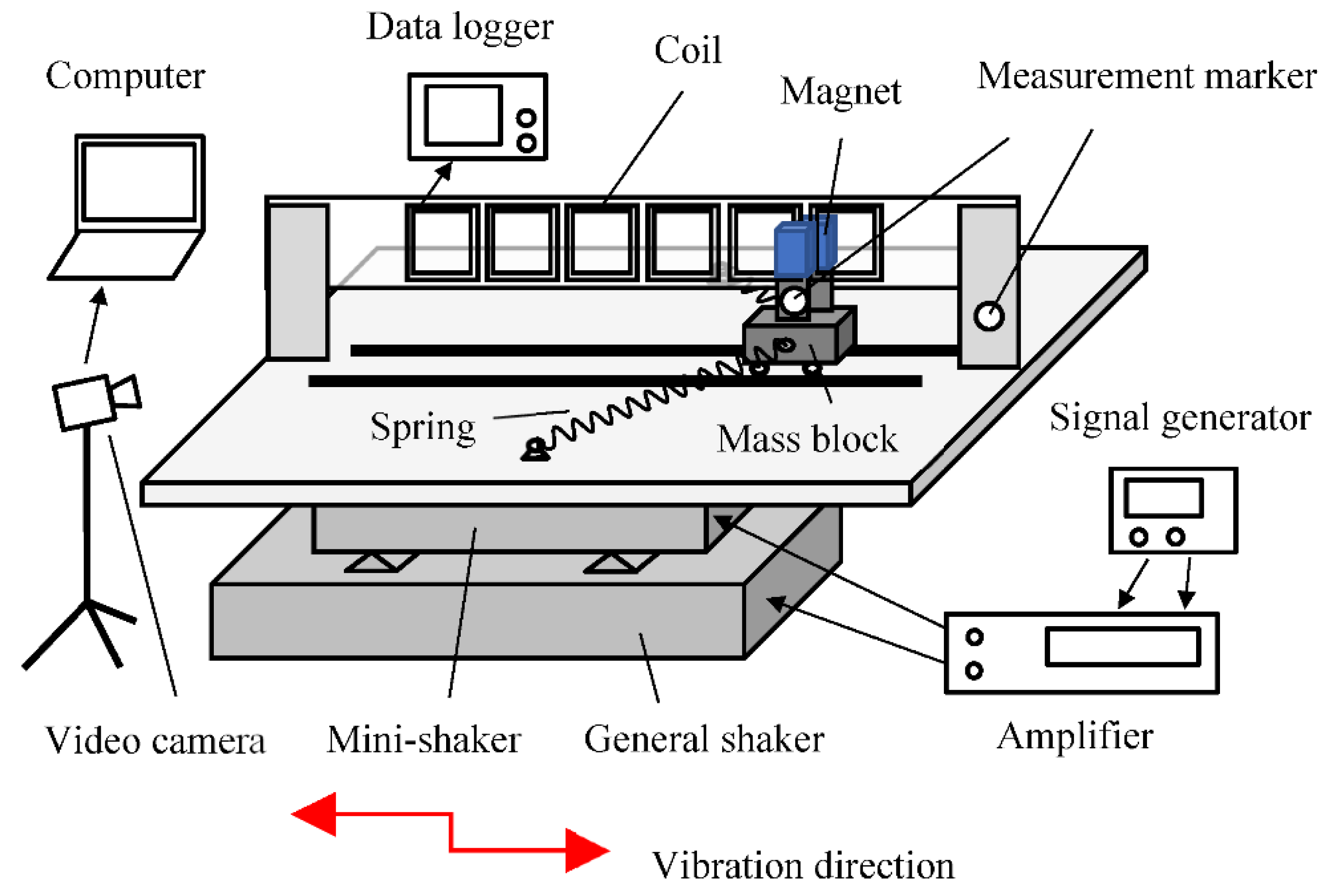
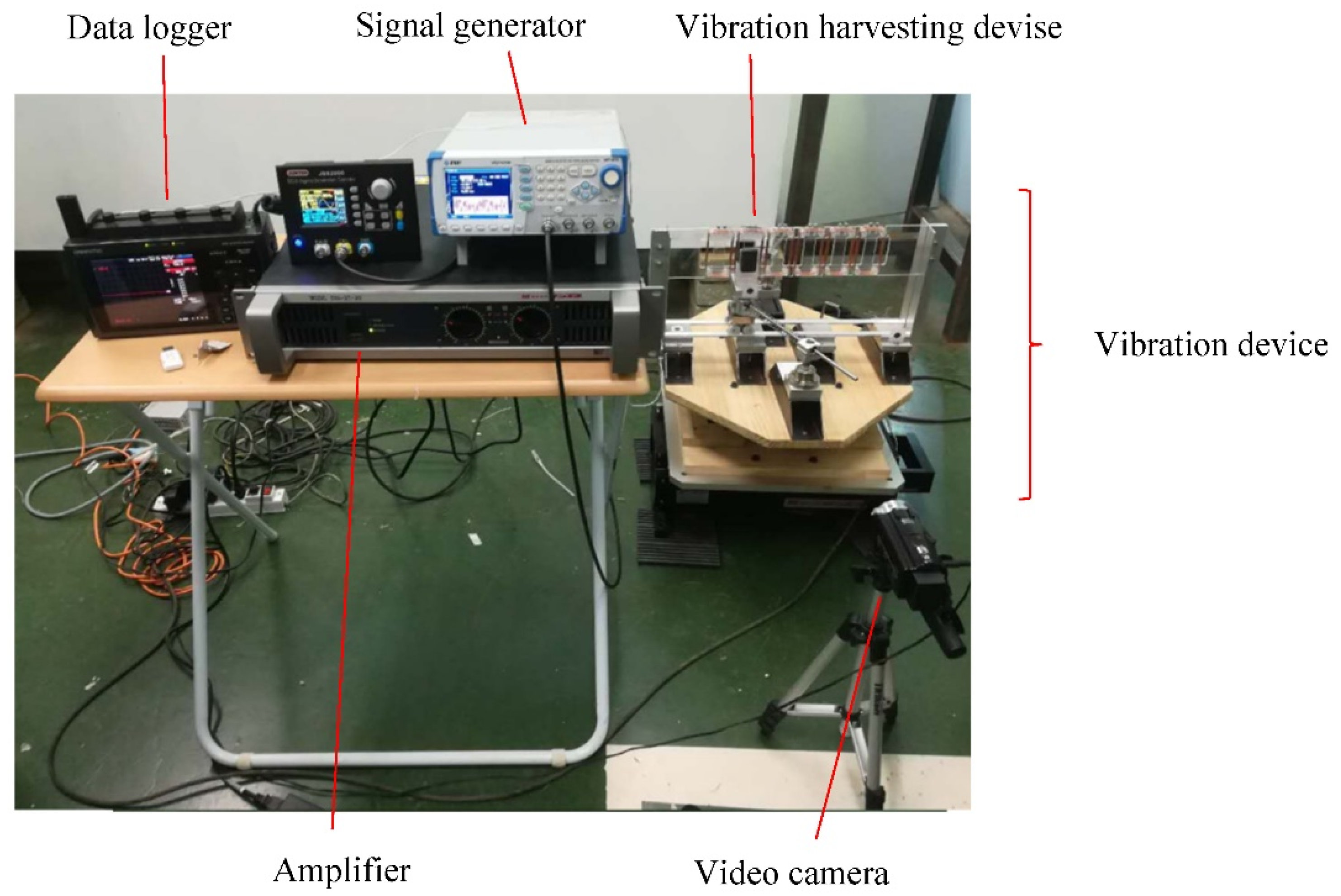
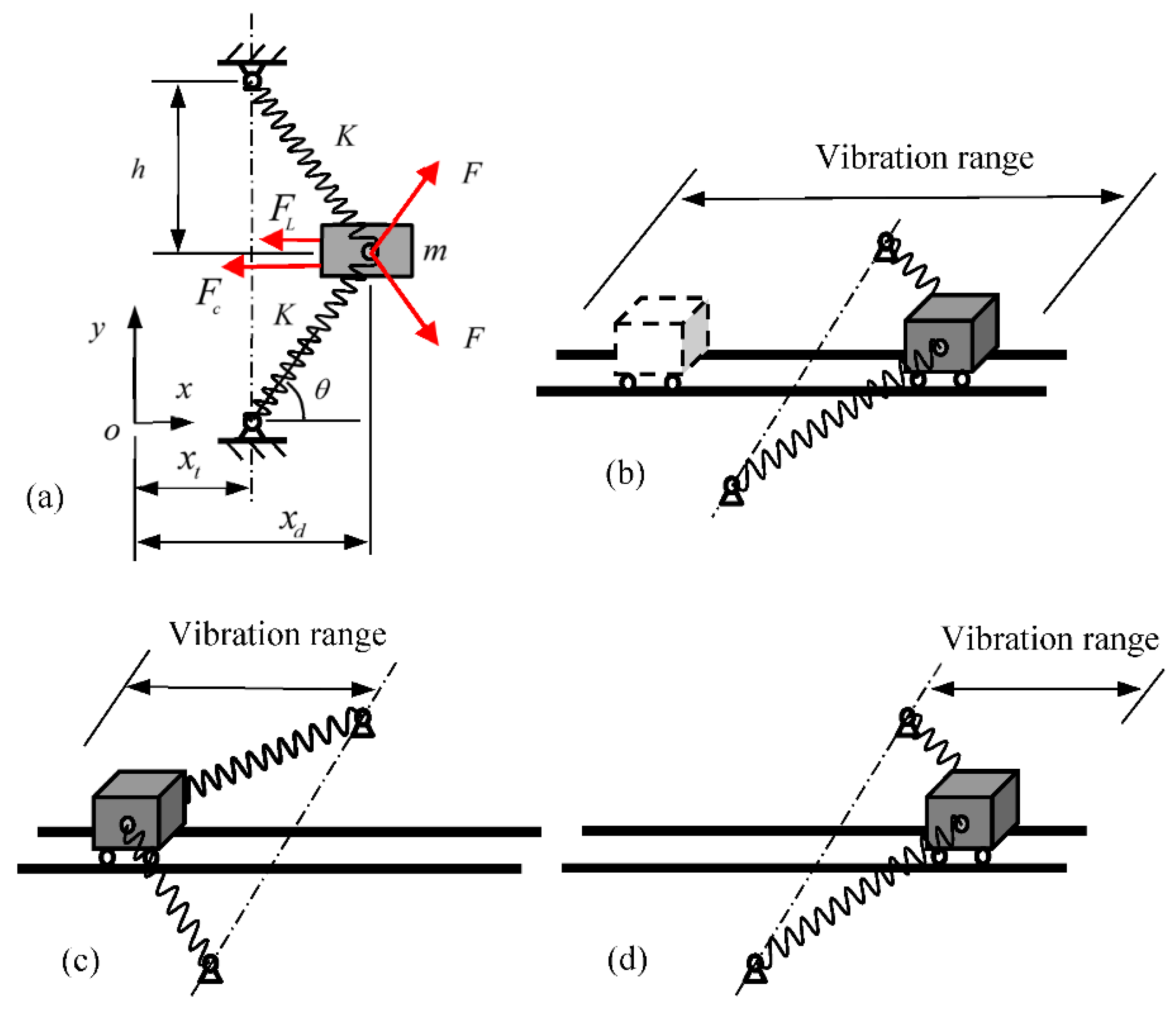
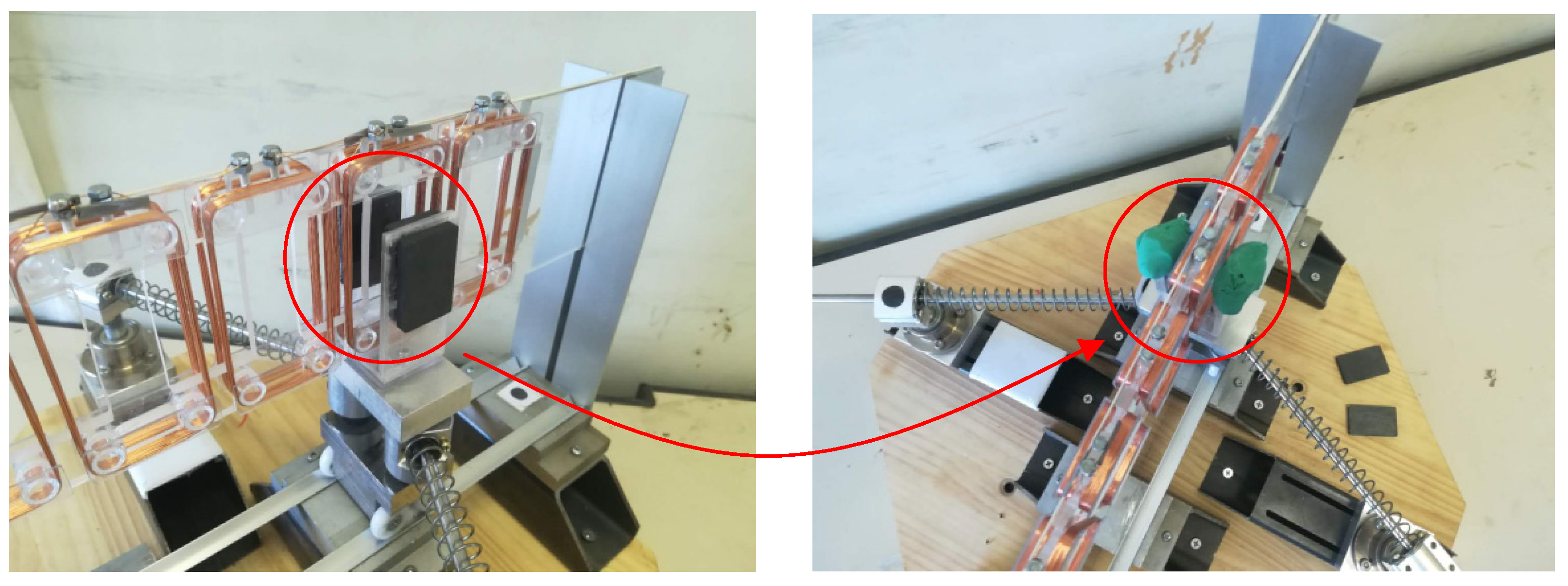
2.1. Horizontal Bi-Stable Vibration Harvesting System
2.2. Numerical Analysis
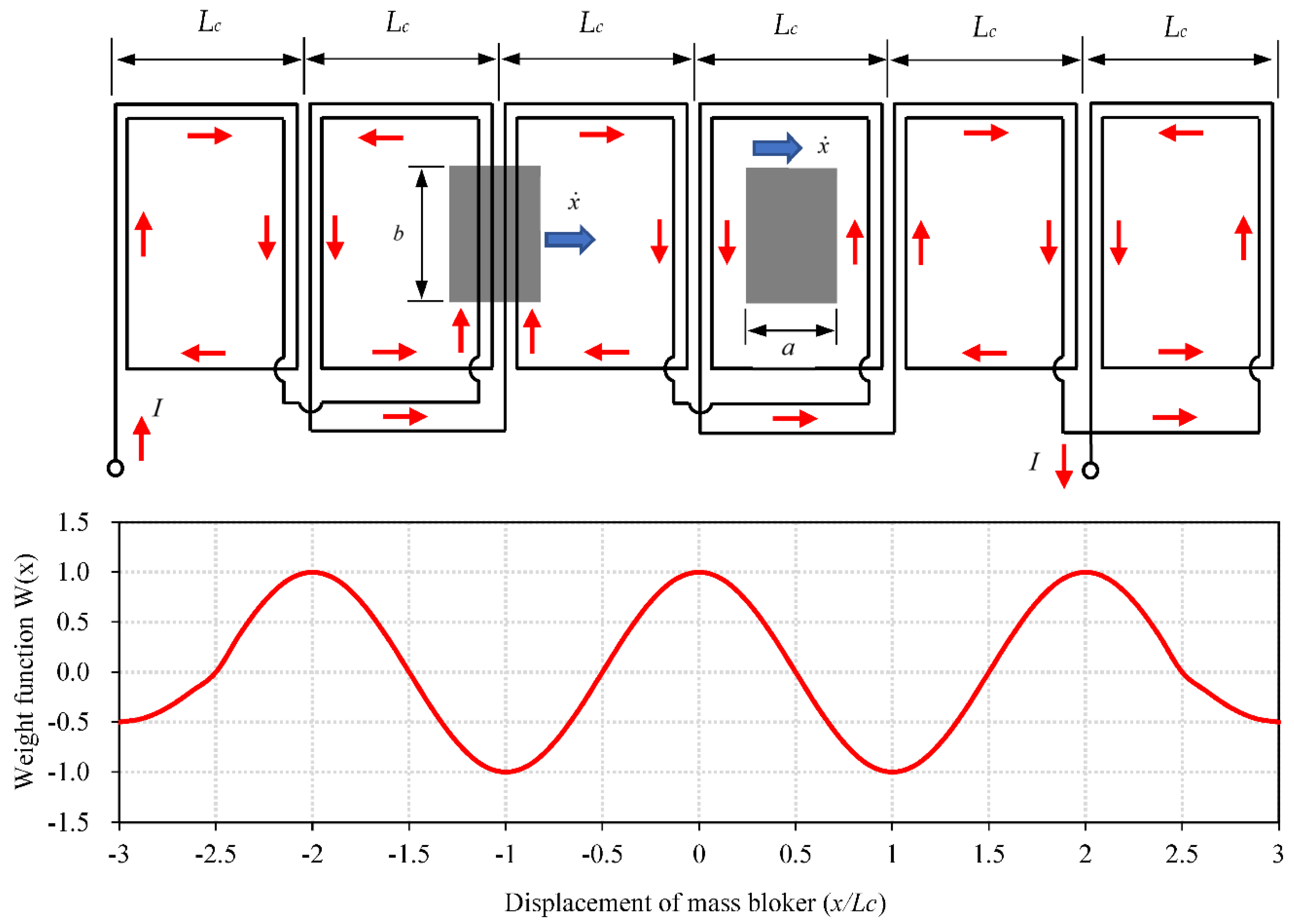
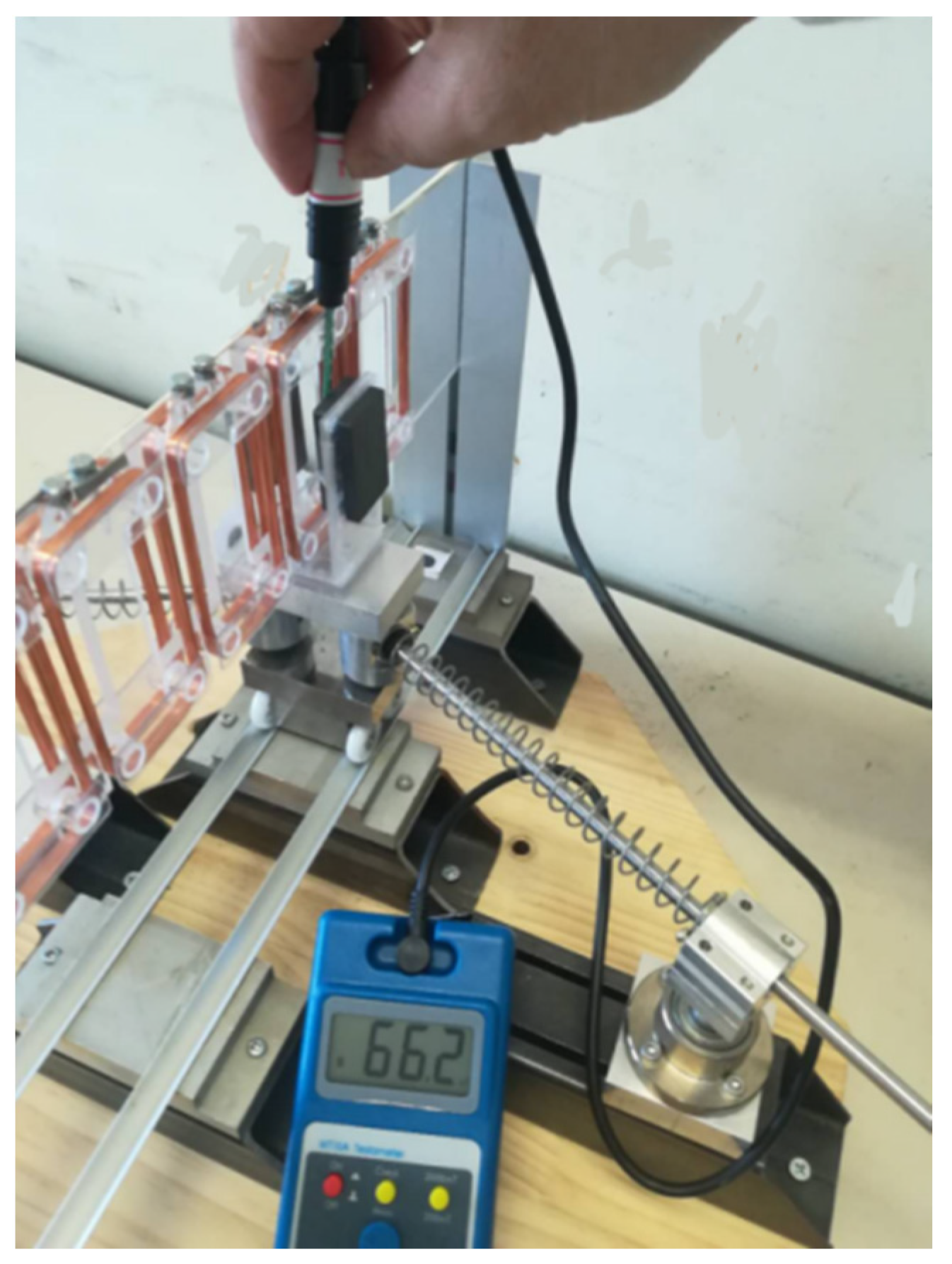
2.3. Magnetic Flux Density
2.4. Identifying Damping Coefficients and Confirming Accuracy of Analysis
- (1)
- The general shaker maintained stationary and measured using only the mini-shaker as the excitation source.
- (2)
- The bi-stable vibration model was vibrated with a sinusoidal wave of frequency 1.5 Hz. Subsequently, the vibration displacement and induced voltage were measured and recorded under conditions of electromagnetic inductive damping.
- (3)
- A damping coefficient c was assigned as a tentative value.
- (4)
- The vibration displacement xi and voltage Vi were estimated based on a numerical analysis method derived using the Runge–Kutta method.
- (5)
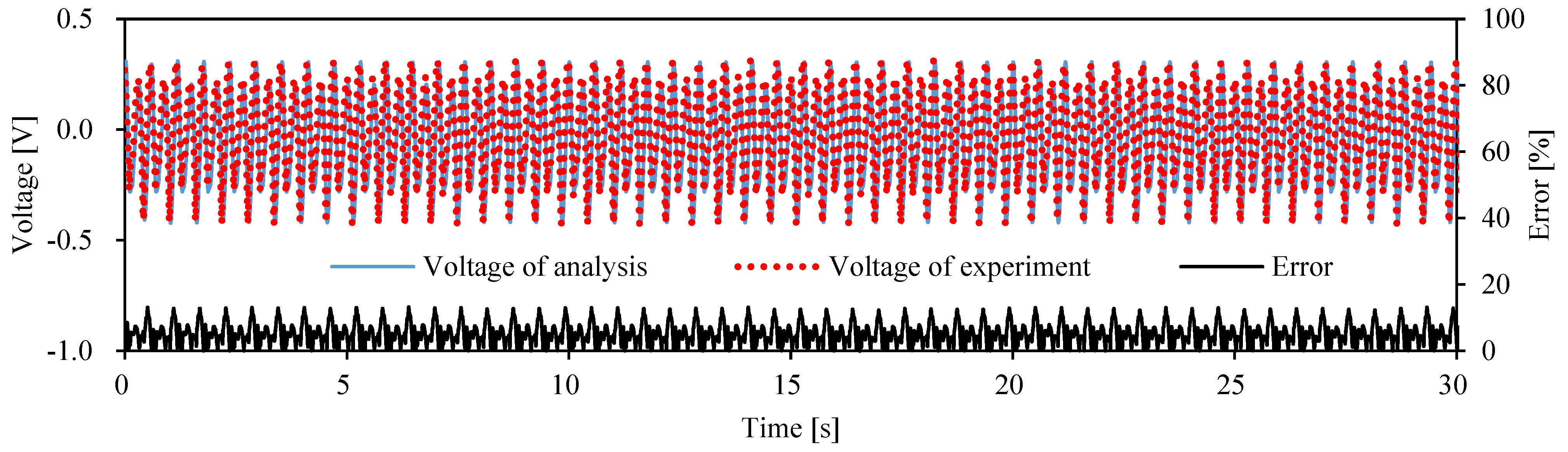
- The values of xi and Vi obtained numerically were compared with the values of and measured experimentally. If the errors are significant, then the damping factor is adjusted, and the analysis is continued by re-performing step (4) until both errors become adequately small. Finally, a damping coefficient c is obtained.
3. Results
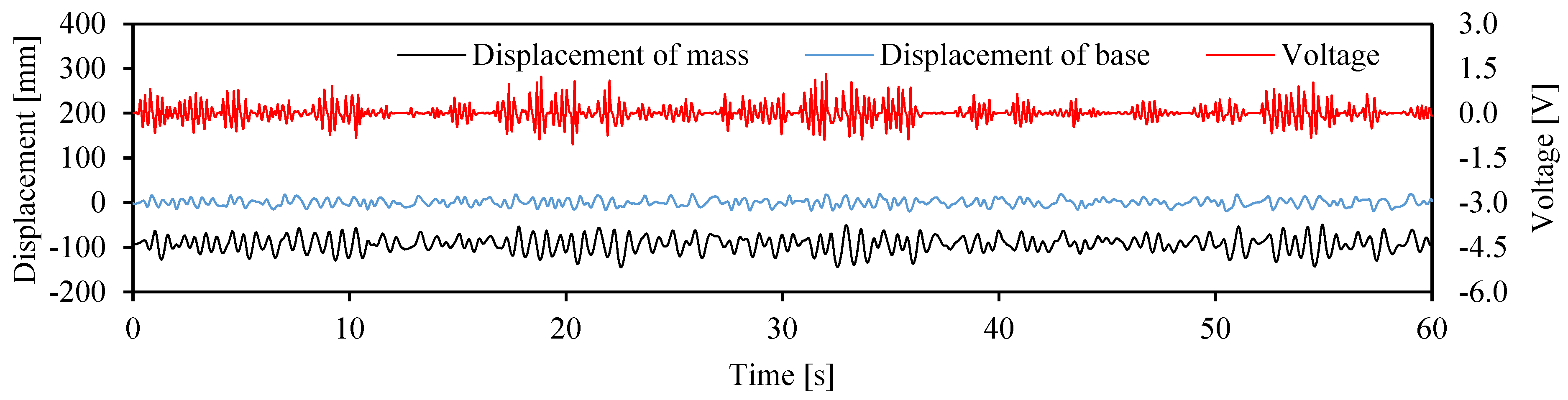
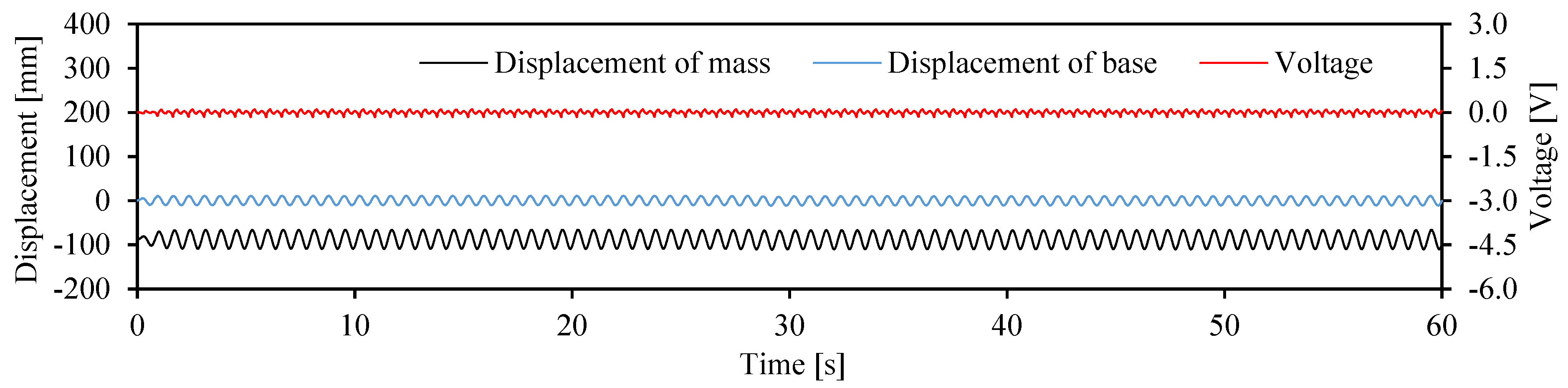
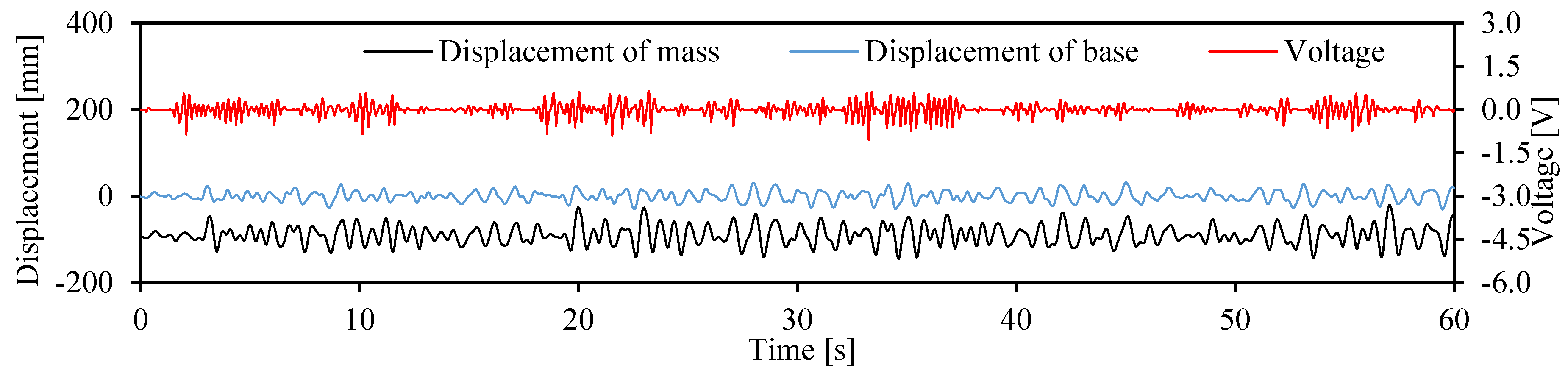
3.1. Measurement Results Yielded by Random Signal Excitation
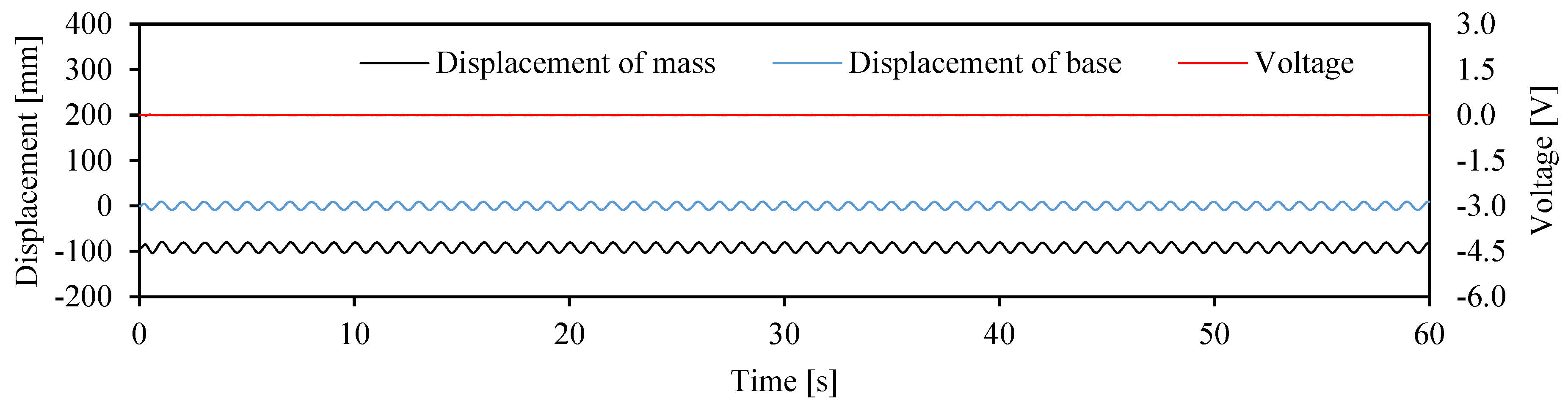
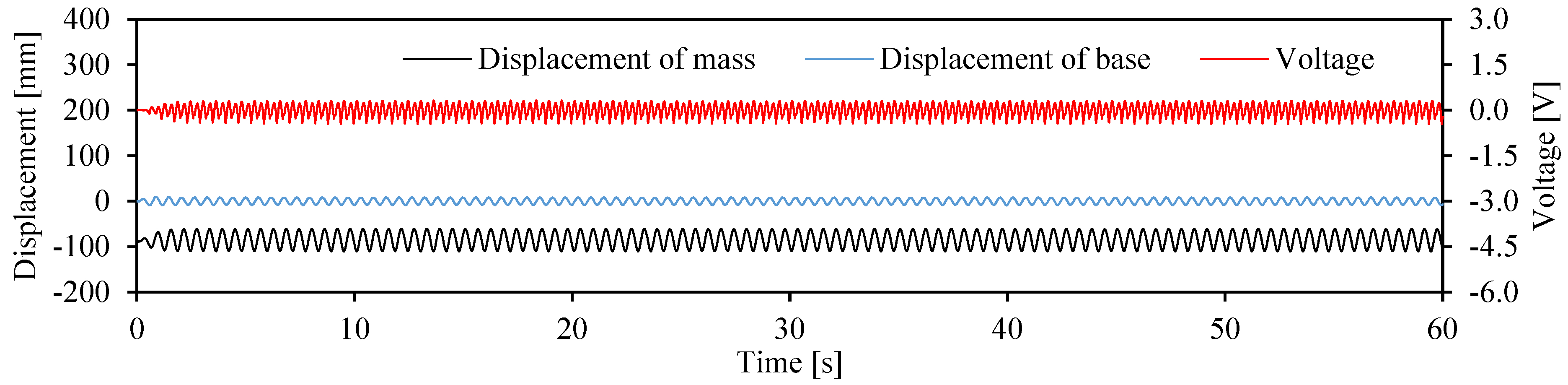
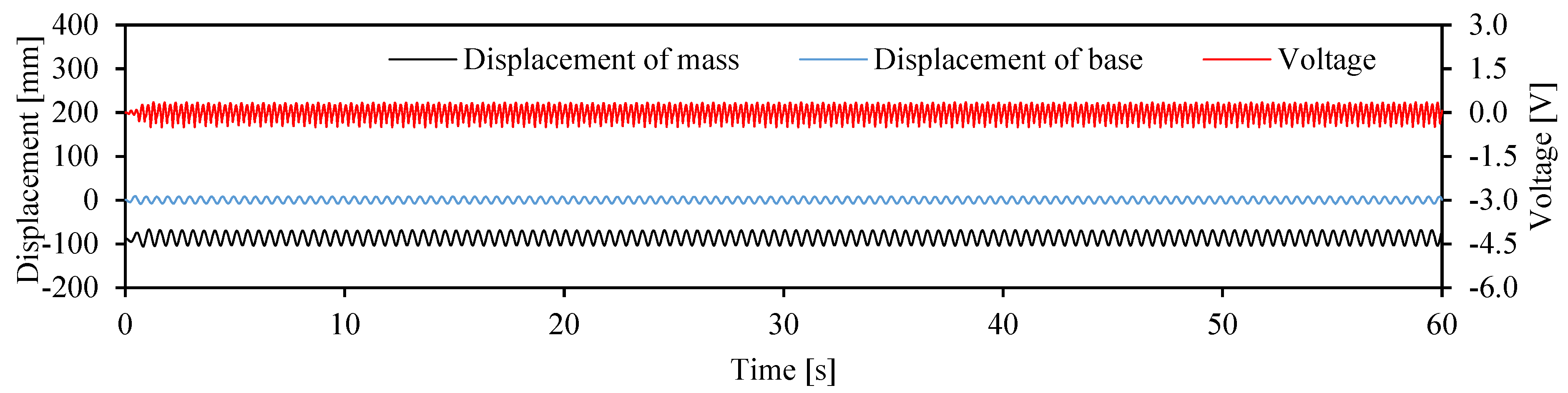
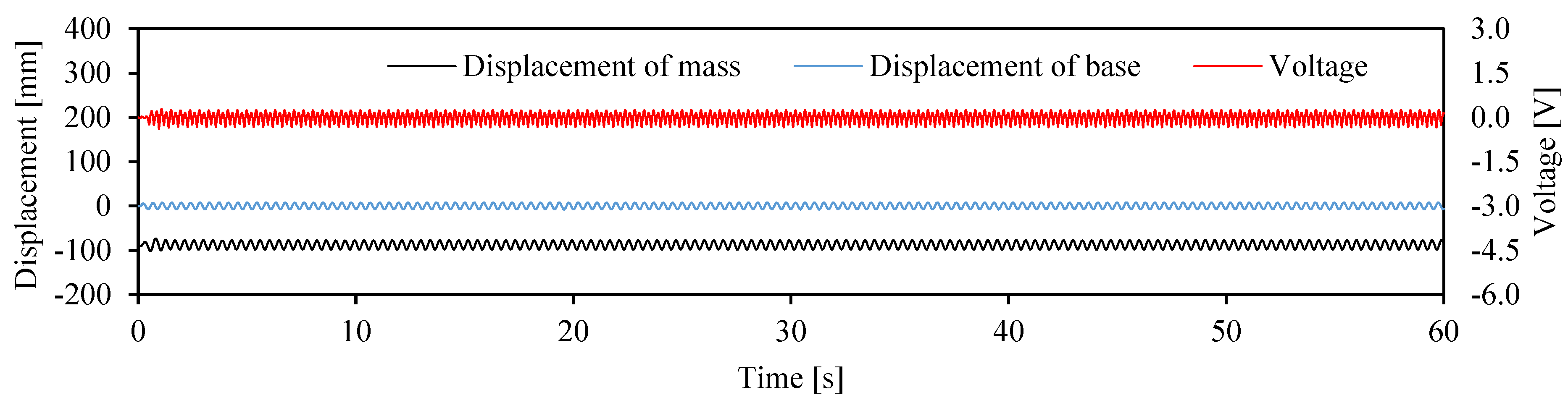
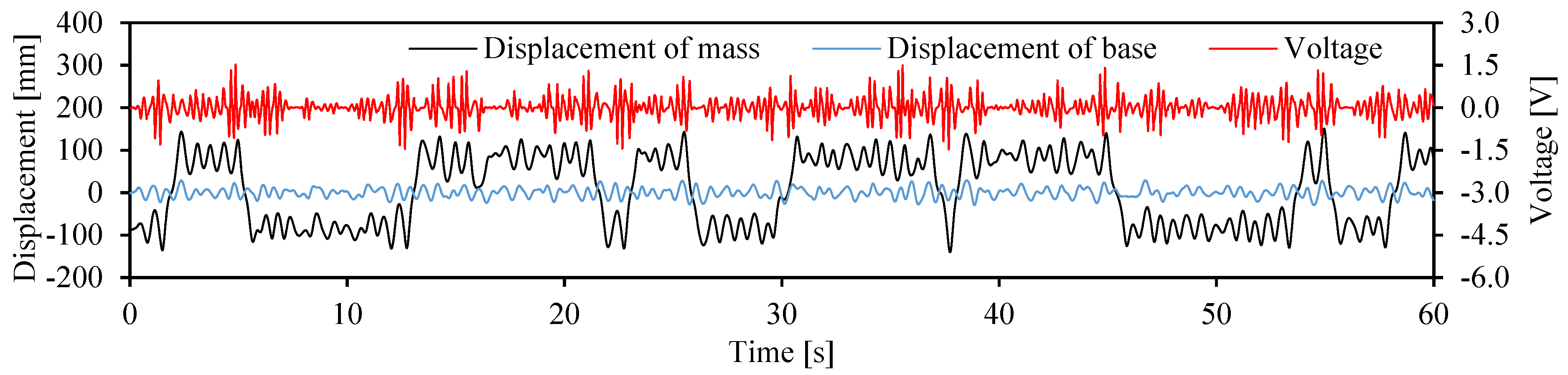
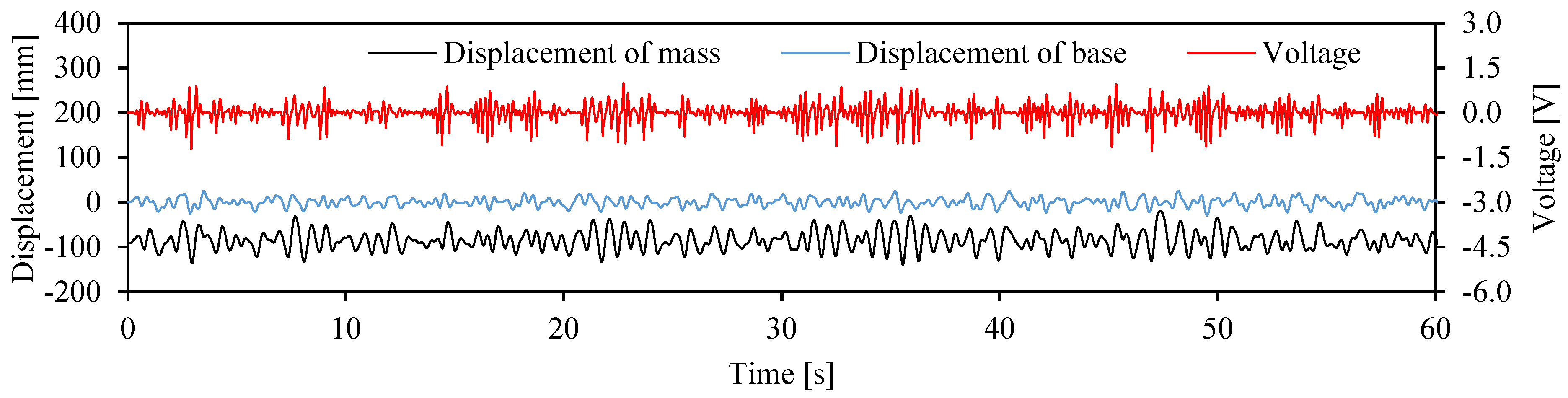
3.2. Measurement Results Yielded by Periodic Signal Excitation
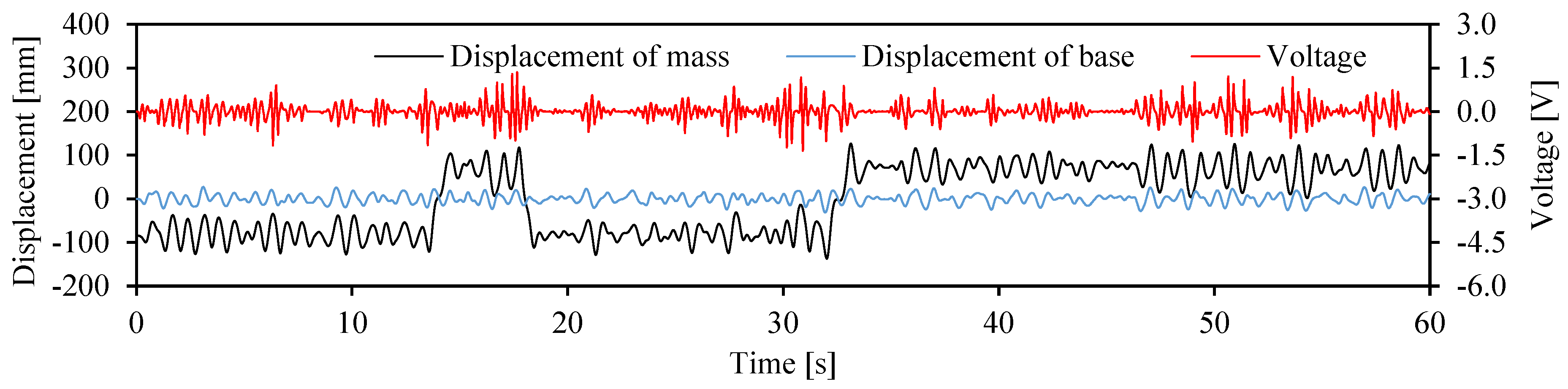
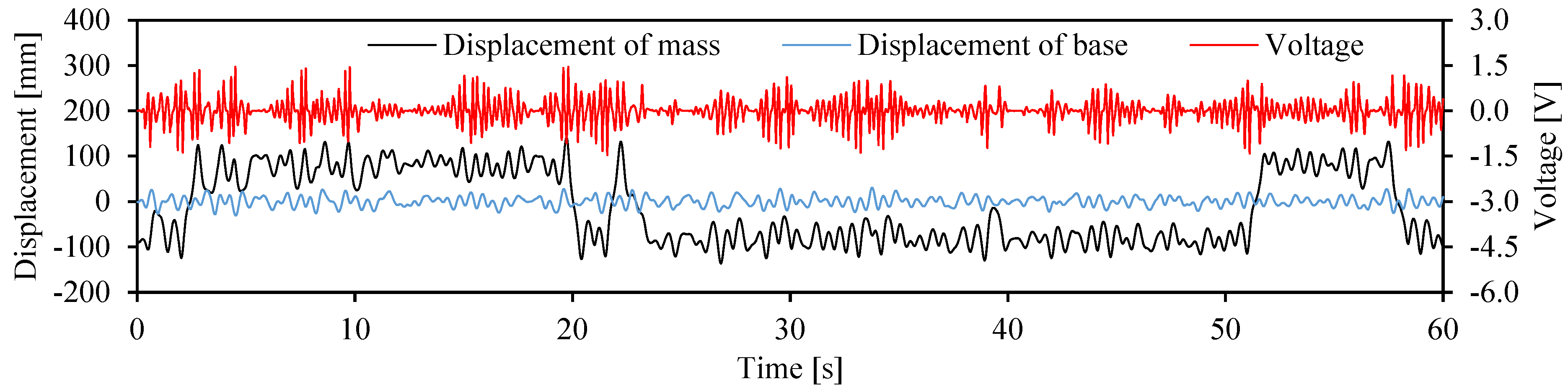
3.3. Measurement Results Yielded by Random and Periodic Signal Co-Excitation
4. Discussion
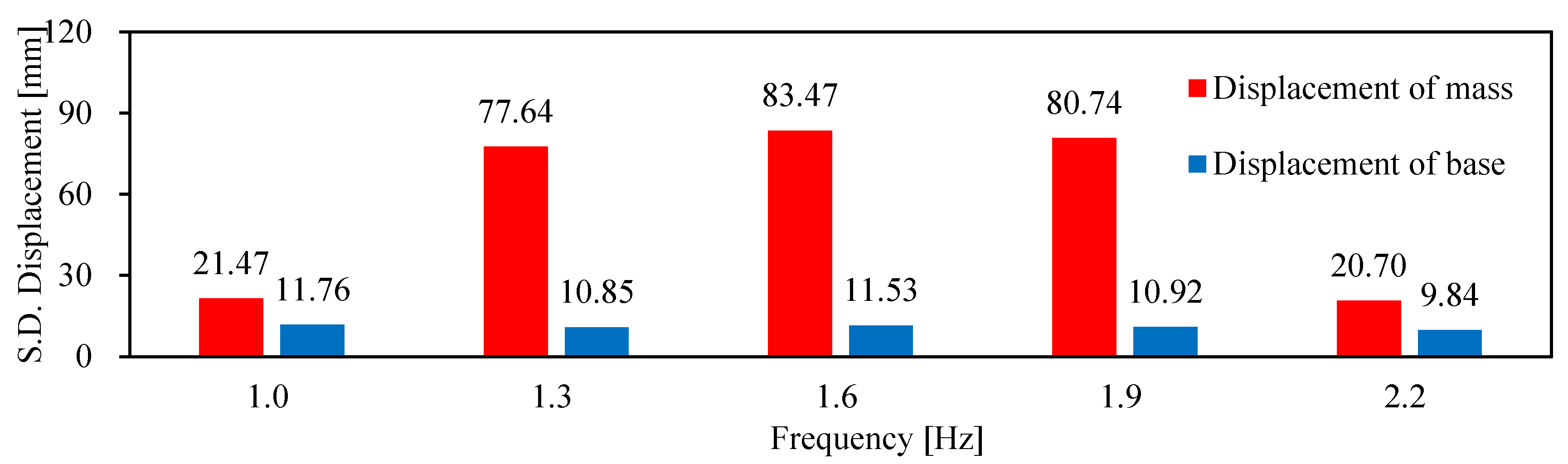
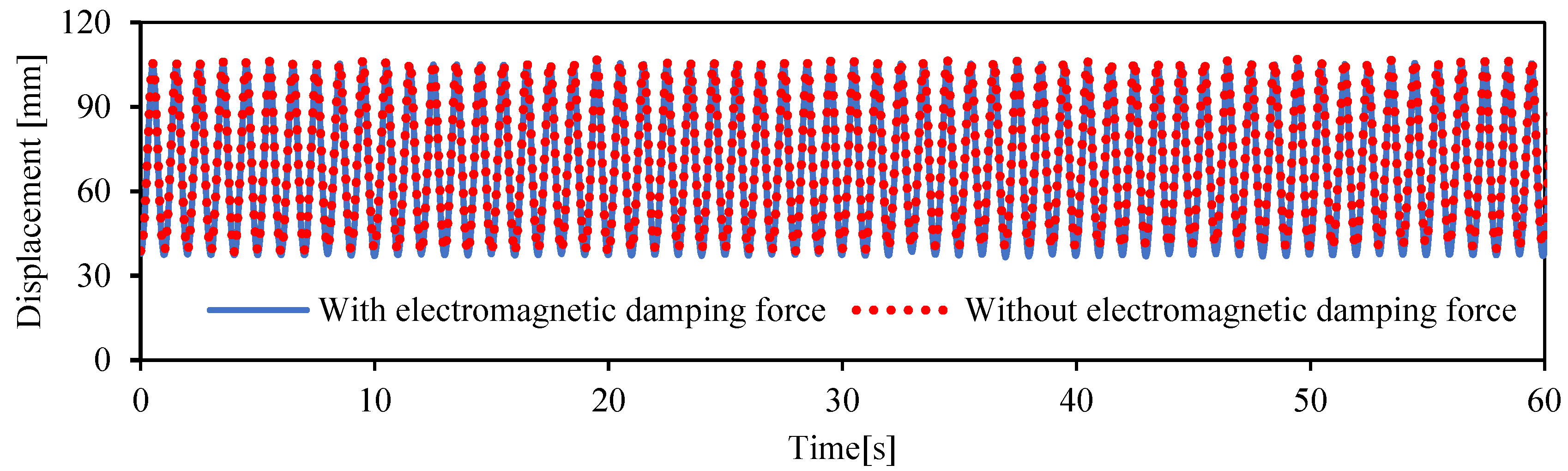
4.1. Effect of Electromagnetic Induction Damping on Vibration Displacement
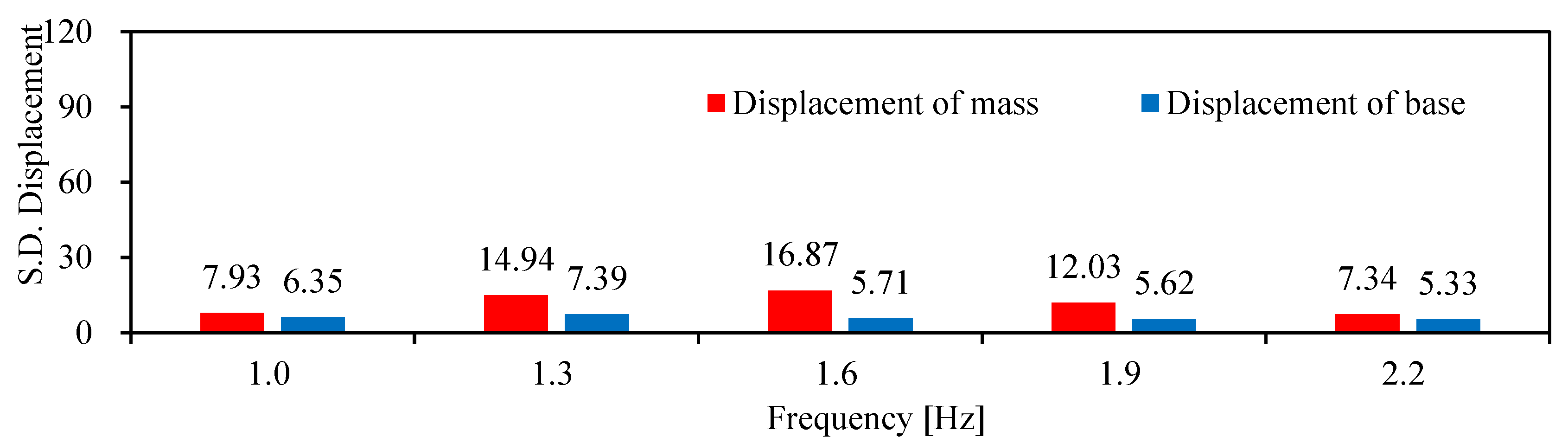
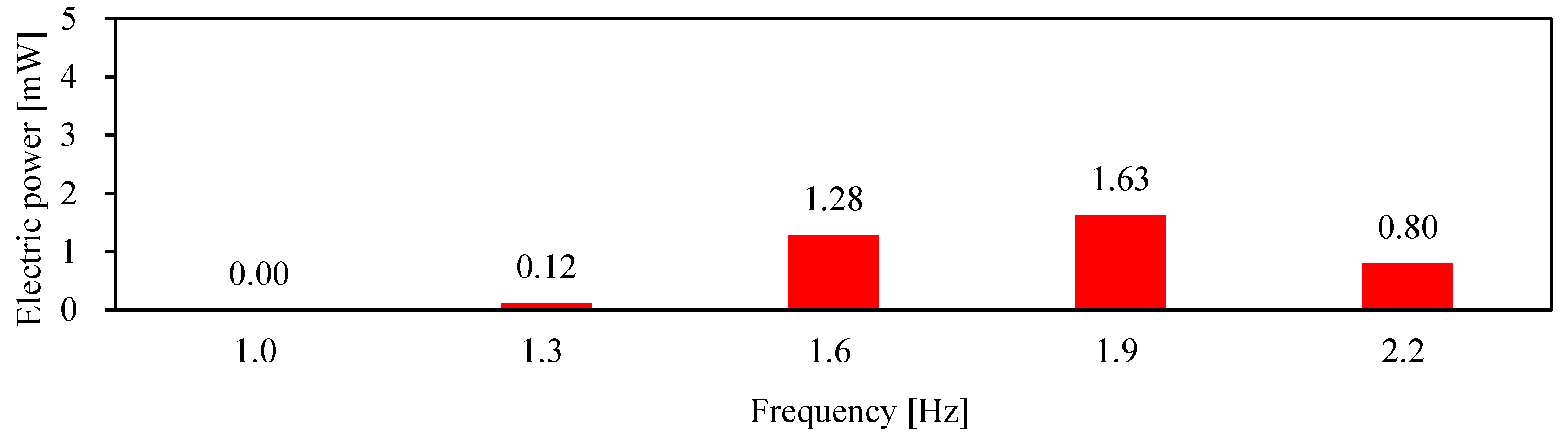
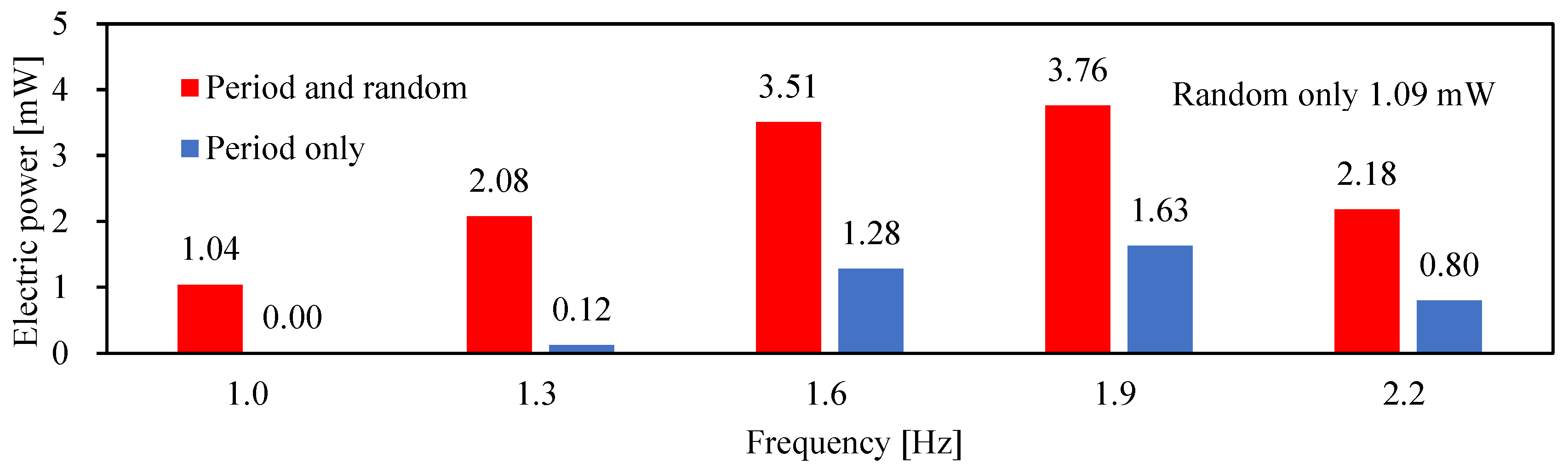
4.2. Forecasting the Most Likely Frequency at Which Stochastic Resonance Occurs
5. Conclusions
- (1)
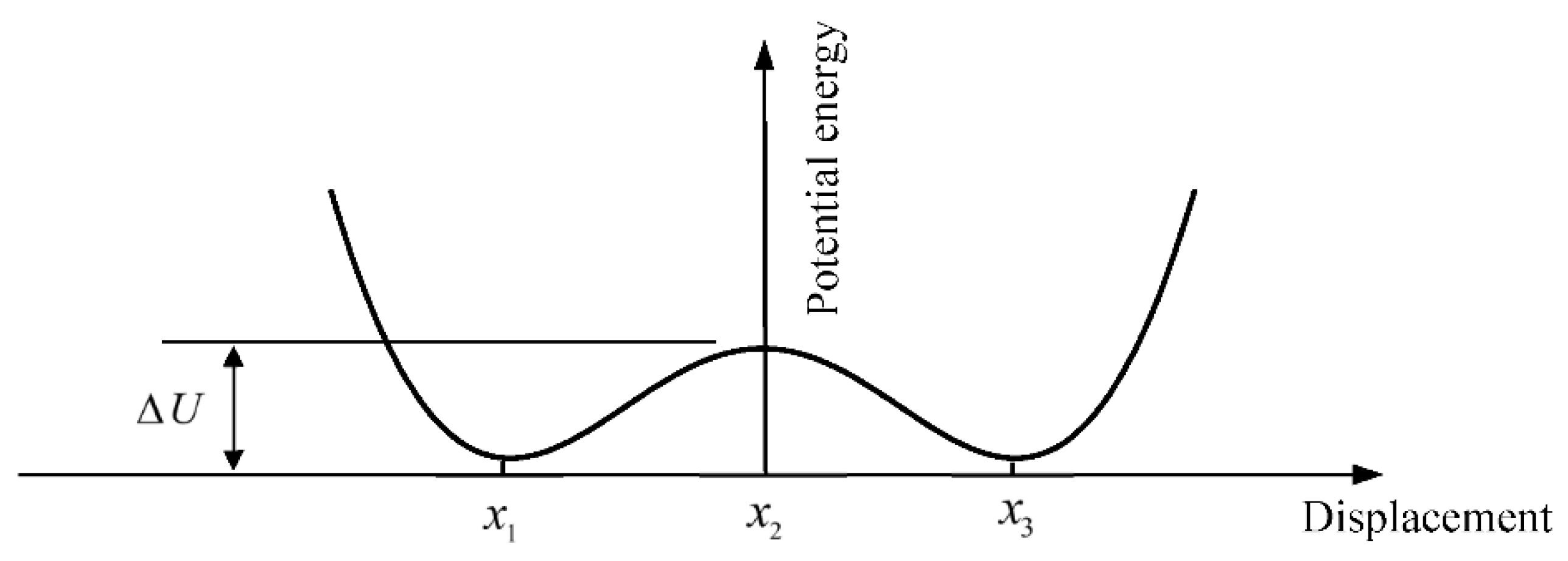
- An energy-harvesting system was proposed for application to random vibration environments by employing a vibration power generation unit comprising magnets and coils. By establishing a set of governing equations that simultaneously consider the elastic force of the spring and the Lorentz force of electromagnetic induction, the potential energy performance of the proposed system was analyzed, and the results showed that the system exhibited bi-stable vibrational characteristics over the entire range of motion. An arrangement weight function W(x) as proposed that incorporated the mutual positional relationship between the magnet and coil during the vibration process, thus enabling a quantitative analysis of the voltage generated in the coil. The analytical values of vibration displacement and voltage derived from numerical analysis were consistent with the measured experimental values.
- (2)
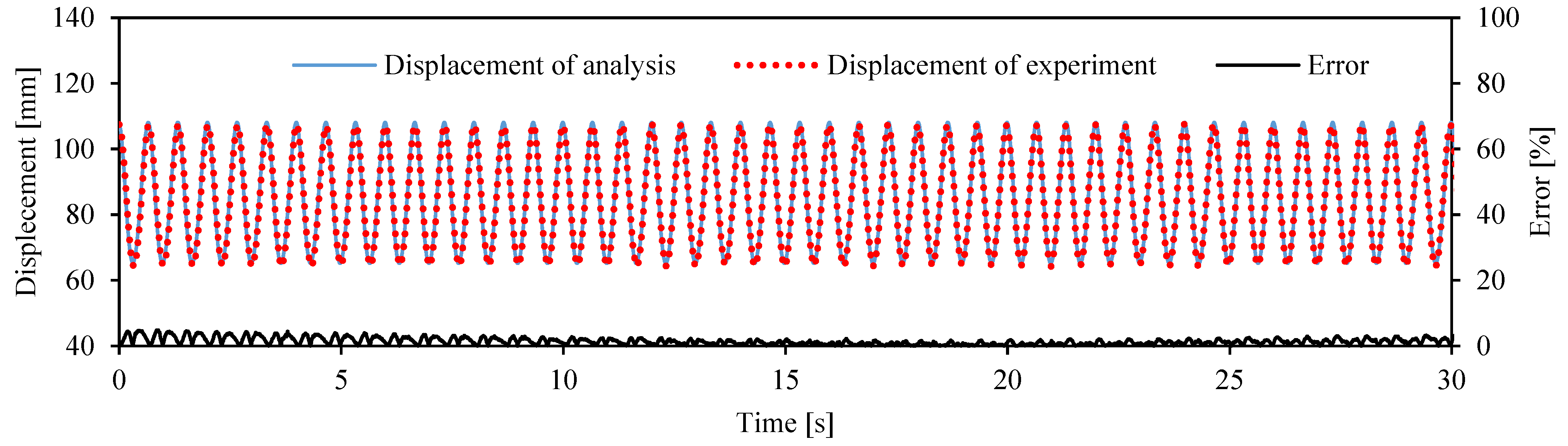
- To determine the friction damping and electromagnetic induction damping of the bi-stable vibration model, a damping coefficient identification method combining numerical analysis and experimental measurements was employed to analyze the actual damping coefficients. The results yielded showed agreement with the experimental values. The average error of the vibration displacement was 2.46%, and the average error of the voltage was 5.27%. To quantitatively investigate the effect of electromagnetic induction damping on the vibration power generated, the experiment results showed that the electromagnetic induction damping force was about 2% smaller than the normal friction damping force.
- (3)
- The appropriate frequency range of periodic signals were added to generate stochastic resonance. Subsequently, by investigating with Kramer’s rate, a prediction equation for the frequency range of periodic signals within which stochastic resonance can be generated easily was derived, and its validity was verified based on comparison with the results of experimental measurements. When random and periodic signals were excited simultaneously, the proposed bi-stable vibration energy-harvesting system effectively improved the vibration amplification and vibration power generation performance by ensuring the generation of stochastic resonance. Its average vibration displacement increased by 629.29%, and the average power generation increased by 52.75%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Corr, L.R.; Ma, T. Issues in vibration energy harvesting. J. Sound Vib. 2018, 2421, 79–90. [Google Scholar] [CrossRef]
- Halim, M.A.; Tao, K.; Towfighian, S.; Zhu, D. Vibration energy harvesting: Linear, nonlinear and rotational approaches. Shock. Vib. 2019, 2019, 5381756. [Google Scholar] [CrossRef]
- Stephen, N.G. On energy harvesting from ambient vibration. J. Sound Vib. 2006, 293, 409–425. [Google Scholar] [CrossRef] [Green Version]
- Khan, F.U.; Ahmad, I. Review of Energy Harvesters Utilizing Bridge Vibrations. Shock Vib. 2016, 2016, 1340402. [Google Scholar] [CrossRef] [Green Version]
- Lallart, M.; Anton, S.R.; Inman, D.J. Frequency self-tuning scheme for broadband vibration energy harvesting. J. Intell. Mater. Syst. Struct. 2010, 21, 897–906. [Google Scholar] [CrossRef]
- Kubba, A.E.; Jiang, K. Efficiency enhancement of a cantilever-based vibration energy harvester. Sensors 2014, 14, 188–211. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Grissom, M.; Fisher, F.T. Resonant frequency of mass-loaded membranes for vibration energy harvesting applications. AIMS Energy 2015, 3, 344–359. [Google Scholar] [CrossRef]
- Chen, Z.; He, J.; Wang, G. Vibration bandgaps of piezoelectric metamaterial plate with local resonators for vibration energy harvesting. Shock Vib. 2019, 2019, 1397123. [Google Scholar] [CrossRef]
- Dai, X. A vibration energy harvester with broadband and frequency-doubling characteristics based on rotary pendulums. Sens. Actuators A Phys. 2016, 241, 161–168. [Google Scholar] [CrossRef]
- Yang, W.; Towfighian, S. A hybrid nonlinear vibration energy harvester. Mech. Syst. Signal Process. 2017, 90, 317–333. [Google Scholar] [CrossRef]
- Gafforelli, G.; Corigliano, R.; Xu, R.; Kim, S. Experimental verification of a bridge-shaped, nonlinear vibration energy harvester. Appl. Phys. Lett. 2014, 105, 203901. [Google Scholar] [CrossRef] [Green Version]
- Gammaitoni, L.; Neri, I.; Vocca, H. Nonlinear oscillators for vibration energy harvesting. Appl. Phys. Lett. 2009, 94, 164102. [Google Scholar] [CrossRef] [Green Version]
- Jiang, W.; Chen, L. Stochastic averaging of energy harvesting systems. Int. J. Non-Linear Mech. 2016, 85, 174–187. [Google Scholar] [CrossRef]
- McInnes, C.R.; Gorman, D.G.; Cartmell, M.P. Enhanced vibrational energy harvesting using nonlinear stochastic resonance. J. Sound Vib. 2008, 318, 655–662. [Google Scholar] [CrossRef] [Green Version]
- Gammaitoni, L.; Hanggi, P.; Jung, P.; Marchesoni, F. Stochastic resonance. Rev. Mod. Phys. 1999, 70, 223–287. [Google Scholar] [CrossRef]
- Benzit, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. A Math. Gen. 1981, 14, 453–457. [Google Scholar] [CrossRef]
- McNamara, B.; Wiesenfeld, K. Theory of stochastic resonance. Phys. Rev. A 1989, 39, 4854–4869. [Google Scholar] [CrossRef] [PubMed]
- Tretyakov, M.V. Numerical technique for studying stochastic resonance. Phys. Rev. E 1998, 57, 4789–4794. [Google Scholar] [CrossRef] [Green Version]
- Rosas, A.; Pinto, L.D., II; Lindenberg, K. Kramers’ rate for systems with multiplicative noise. Phys. Rev. E 2016, 94, 012101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Harne, R.L.; Wang, K.W. A review of the recent research on vibration energy harvesting via bistable systems. Smart Mater. Struct. 2013, 22, 023001. [Google Scholar] [CrossRef]
- Pellegrini, S.P.; Tolou, N.; Schenk, M.; Herder, J.L. Bistable vibration energy harvesters: A review. J. Intell. Mater. Syst. Struct. 2012, 24, 1303–1312. [Google Scholar] [CrossRef]
- Baltana, J.P.; Lopez, L.; Blechman, I.I.; Landa, P.S.; Zaikin, A.; Kurths, J.; Sanjua MA, F. Experimental evidence, numerics, and theory of vibrational resonance in bistable systems. Phys. Rev. E 2003, 67, 066119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, C.; Liu, Y.; Zhan, M. Frequency-resonance-enhanced vibrational resonance in bistable systems. Phys. Rev. E 2011, 83, 061122. [Google Scholar] [CrossRef] [PubMed]
- Basquerotto, C.H.C.C.; Chavarette, F.R.; Silva, S.D. Analysis of bistable and chaotic piezoelectric energy harvesting device coupled with diode bridge rectifier. Indian J. Pure Appl. Math. 2015, 98, 275–289. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhou, S.; Litak, G. Uncertainty analysis of bistable vibration energy harvesters based on the improved interval extension. J. Vib. Eng. Technol. 2020, 8, 297–306. [Google Scholar] [CrossRef] [Green Version]
- Stanton, S.C.; McGehee, C.C.; Mann, B.P. Nonlinear dynamics for broadband energy harvesting: Investigation of a bistable piezoelectric inertial generator. Phys. D 2010, 239, 640–653. [Google Scholar] [CrossRef]
- Wang, K.; Dai, X.; Xiang, X.; Ding, G.; Zhao, X. Optimal potential well for maximizing performance of bi-stable energy harvester. Appl. Phys. Lett. 2019, 115, 143904. [Google Scholar] [CrossRef]
- Ibrahim, A.; Towfighian, S.; Younis, M.I. Dynamics of transition regime in bi-stable vibration energy harvesters. ASME J. Vib. Acoust. 2017, 139, 051008. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Sharma, A.; Vaish, R.; Kumar, R.; Jain, S.C. A numerical study on flexoelectric bistable energy harvester. Appl. Phys. A 2018, 124, 483. [Google Scholar] [CrossRef]
- Ali, S.F.; Adhikari, S.; Friswell, M.I.; Narayanan, S. The analysis of piezomagnetoelastic energy harvesters under broadband random excitations. J. Appl. Phys. 2011, 109, 074904. [Google Scholar] [CrossRef]
- Friswell, M.I.; Ali, S.F.; Bilgen, O.; Adhikari, S.; Lees, A.W.; Litak, G. Non-linear piezoelectric vibration energy harvesting from a vertical cantilever beam with tip mass. J. Intell. Mater. Syst. Struct. 2012, 23, 1505–1521. [Google Scholar] [CrossRef]
- Lan, C.B.; Qin, W.Y. Energy harvesting from coherent resonance of horizontal vibration of beam excited by vertical base motion. Appl. Phys. Lett. 2014, 105, 113901. [Google Scholar] [CrossRef]
- Bilgen, O.; Friswell, M.I.; Ali, S.F.; Litak, G. Broadband vibration energy harvesting from a vertical cantilever piezocomposite beam with tip mass. Int. J. Struct. Stab. Dyn. 2015, 15, 2. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Wang, W.; Liu, S.; Lin, J. Modeling and experimental verification of doubly nonlinear magnet-coupled piezoelectric energy harvesting from ambient vibration. Smart Mater. Struct. 2015, 24, 055008. [Google Scholar] [CrossRef]
- Gao, Y.; Leng, Y.; Javey, A.; Tan, D.; Liu, J.; Fan, S.; Lai, Z. Theoretical and applied research on bistable dual-piezoelectric-cantilever vibration energy harvesting toward realistic ambience. Smart Mater. Struct. 2016, 25, 115032. [Google Scholar] [CrossRef]
- Lan, C.; Tang, L.; Qin, W.; Xiong, L. Magnetically coupled dual-beam energy harvester: Benefit and trade-off. J. Intell. Mater. Syst. Struct. 2017, 29, 1216–1235. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, W.; Zuo, M.; Tan, H.; Fan, H.; Mao, Q.; Wan, X. An Arc-shaped piezoelectric bistable vibration energy harvester: Modeling and experiments. Sensors 2018, 18, 4472. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Podder, P.; Amann, A.; Roy, S. Combined effect of bistability and mechanical impact on the performance of a nonlinear electromagnetic vibration energy harvester. IEEE/ASME Trans. Mechatron. 2016, 21, 727–739. [Google Scholar] [CrossRef]
- Bouhedma, S.; Zheng, Y.; Lange, F.; Hohlfeld, D. Magnetic frequency tuning of a multimodal vibration energy harvester. Sensors 2019, 19, 1149. [Google Scholar] [CrossRef] [Green Version]
- Cottone, F.; Basset, P.; Vocca, H.; Gammaitoni, L.; Bourouina, T. Bistable electromagnetic generator based on buckled beams for vibration energy harvesting. J. Intell. Mater. Syst. Struct. 2013, 25, 1484–1495. [Google Scholar] [CrossRef]
- Huguet, T.; Lallart, M.; Badel, A. Orbit jump in bistable energy harvesters through buckling level modification. Mech. Syst. Signal Process. 2019, 128, 202–215. [Google Scholar] [CrossRef]
- Liu, W.Q.; Badel, A.; Formosa, F.; Wu, Y.P.; Agbossou, A. Novel piezoelectric bistable oscillator architecture for wideband vibration energy harvesting. Smart Mater. Struct. 2013, 22, 035013. [Google Scholar] [CrossRef]
- Liu, W.Q.; Badel, A.; Formosa, F.; Wu, Y.P.; Agbossou, A. Wideband energy harvesting using the combination of optimized synchronous electric charge extraction circuit and bistable harvester. Smart Mater. Struct. 2013, 22, 125038. [Google Scholar] [CrossRef]
- Zou, H.; Zhang, W.; Li, W.; Hu, K.; Wei, K.; Peng, Z.; Meng, G. A broadband compressive-mode vibration energy harvester enhanced by magnetic force intervention approach. Appl. Phys. Lett. 2017, 110, 163904. [Google Scholar] [CrossRef]
- Zou, H.; Zhang, W.; Li, W.; Wei, K.; Hu, K.; Peng, Z.; Meng, G. Magnetically coupled flextensional transducer for wideband vibration energy harvesting: Design, modeling and experiments. J. Sound Vib. 2018, 416, 55–79. [Google Scholar] [CrossRef]
- Mei, X.; Zhou, S.; Yang, Z.; Kaizuka, T.; Nakano, K. A tri-stable energy harvester in rotational motion: Modeling, theoretical analyses and experiments. J. Sound Vib. 2020, 469, 115142. [Google Scholar] [CrossRef]
- Mei, X.; Zhou, S.; Yang, Z.; Kaizuka, T.; Nakano, K. A passively self-tuning nonlinear energy harvester in rotational motion: Theoretical and experimental investigation. Smart Mater. Struct. 2020, 29, 045033. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Litak, G.; Lin, J. Numerical analysis and experimental verification of broadband tristable energy harvesters. Tech. Mess. 2018, 85, 9. [Google Scholar] [CrossRef]
- Cao, J.; Zhou, S.; Wang, W.; Lin, J. Influence of potential well depth on nonlinear tristable energy harvesting. Appl. Phys. Lett. 2015, 106, 173903. [Google Scholar] [CrossRef]
- Zheng, R.; Nakano, K.; Hu, H.; Su, D.; Matthew, P.C. An application of stochastic resonance for energy harvesting in a bistable vibrating system. J. Sound Vib. 2014, 333, 2568–2587. [Google Scholar] [CrossRef]
- Nakano, K.; Cartmell, M.; Hu, H.; Zheng, R. Feasibility of energy harvesting using stochastic resonance caused by axial periodic force. J. Mech. Eng. 2014, 60, 314–320. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zheng, R.; Ejiri, K.; Su, D.; Nakano, K. Modelling analysis for vibration energy harvesting excited by low-speed automobile tires. Trans. JSME 2016, 82, 840. (In Japanese) [Google Scholar]
- Zhang, Y.; Zheng, R.; Kaizuka, T.; Su, D.; Nakano, K.; Cartmell, M.P. Broadband vibration energy harvesting by application of stochastic resonance from rotational environments. Eur. Phys. J. Spec. Top. 2015, 224, 2687–2701. [Google Scholar] [CrossRef]
- Zuo, L.; Tang, X. Large-scale vibration energy harvesting. J. Intell. Mater. Syst. Struct. 2013, 21, 1405–1430. [Google Scholar] [CrossRef]
- Zhao, W.; Wu, Q.; Zhao, X.; Nakano, K.; Zheng, R. Development of large-scale bistable motion system for energy harvesting by application of stochastic resonance. J. Sound Vib. 2020, 473, 115213. [Google Scholar] [CrossRef]
- Mohanty, A.; Parida, S.; Behera, R.K.; Roy, T. Vibration energy harvesting: A review. J. Adv. Dielectr. 2019, 9, 4. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Detail | Parameter |
|---|---|---|
| Mass block | weight | 910 g |
| Horizontal rail | Length | 350 mm |
| Width | 50 mm | |
| Vertical distance | From rail to support base | 150 mm |
| Elastic spring | Spring coefficient | 157 N/m |
| Initial length | 180 mm | |
| Permanent magnet | Length | 40 mm |
| Width | 30 mm | |
| Thickness | 15 mm | |
| Surface magnetic flux density | 80 mT | |
| Conductor coil | Frame width | 50 mm |
| Frame height | 85 mm | |
| number of coil turns | 150 | |
| Electric resistance | 30 Ω | |
| Mini-Shaker | SSV-105 | SAN ESU Co., Ltd. |
| General Shaker | SSV-125 | SAN ESU Co., Ltd. |
| Amplifier | SVA-ST-30, two channels | SAN ESU Co., Ltd. |
| Video recording information | Video camera | GZ-E765, JVC Co., Ltd. |
| Frames per second (FPS) | 300 | |
| Dot per inch (DPI) | 1920 × 1080 | |
| Diameter of the marker | 10 mm | |
| General function Generator | NF-WF1973 | NF Corporation |
| Mini-function Generator | JDS2800 | Hangzhou Measurement Instrumentation Co. |
| Data logger | GL2000 | Graphtec Co. |
| Marker tracking software | MOVIS Neo V3.0 | NAC Image Technology Inc. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, L.; Zhao, W.; Guan, J.; Gomi, N.; Zhao, X. Horizontal Bi-Stable Vibration Energy Harvesting Using Electromagnetic Induction and Power Generation Efficiency Improvement via Stochastic Resonance. Machines 2022, 10, 899. https://doi.org/10.3390/machines10100899
Guo L, Zhao W, Guan J, Gomi N, Zhao X. Horizontal Bi-Stable Vibration Energy Harvesting Using Electromagnetic Induction and Power Generation Efficiency Improvement via Stochastic Resonance. Machines. 2022; 10(10):899. https://doi.org/10.3390/machines10100899
Chicago/Turabian StyleGuo, Linshi, Wei Zhao, Jingchao Guan, Nobuyuki Gomi, and Xilu Zhao. 2022. "Horizontal Bi-Stable Vibration Energy Harvesting Using Electromagnetic Induction and Power Generation Efficiency Improvement via Stochastic Resonance" Machines 10, no. 10: 899. https://doi.org/10.3390/machines10100899