
Fabric Inflatable Soft Actuators for Soft Wearable Devices: The MOSAR Case
 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. FISAs Design
2.2. FISAs Fabrication
- FISAs chamber’s (a) profile is drawn and then cut in laser using 200D TPU-coated Oxford nylon blue (Rockywoods)® to reach high-pressure values.
- T plastic connectors (b) are inserted at the top of each chamber for airflow circulation and tight with nuts to avoid air leaks. Then, chambers are folded and their edges are heat sealed.
- Inelastic fabric material (c) is used for the base layer to cover the target limb that will be moved. Likewise, fabric layers (d) are separately sewn to contain FISAs chambers along the base layer depending on the gap. They allow chambers to be easily removed or replaced, and also avoid twisting and radial expansion.
- Air tubing (e) is connected in all chambers for airflow circulation along the path.
2.3. FISAs Electro-Pneumatic Integration
- For air supply, a commercial compressor unit (a) was used and connected to a maintenance unit (b) (152894T106, FESTO™) for fluid purification during the inflation process. Then, the air is directed towards a 2/2-way Proportional Valve (c), (PFV-W24E05-M100C-0500, Enfield Technologies™) for accurate adjusting pressure.
- The Proportional Valve is connected to a reference pressure sensor (d) (577020, FESTO™) only to monitor the inlet pressure. At the same time, the PV is connected to a 3/2-way solenoid valve (e) (MHE3-MS1H-3/2G-A/8-K, FESTO™) which has a spring return and fast switching time. Additionally, a Power Supply (f) of 24 V has been used to energize all these components.
- To control flow regulation of the Proportional Valve, it is necessary to condition the analog signal from 0 to 5 V for opening it. Therefore, a non-inverting operational amplifier (g) (LM358P, Texas Instruments™) of 1.5 gain and (510 ) was used for the Digital Analog Converter (DAC) at the output of the microcontroller from 0 to 3.3 V.
- The air at the output of the Solenoid Valve enters directly to FISAs actuators (h) during the inflation-deflation process. At the same time, it is connected to a (ASDXAVX100PGAA5 Honeywell International Inc.™) pressure sensor (i) of 5 V to measure the current value. Moreover, a MOSFET transistor (j) (IRF3205) has been used to activate the solenoid valve to purge the air into the atmosphere only by switching the gnd connection.
- An electronic NUCLEO-STM32F767ZI™ board (k) was used to control the digital outputs of the MOSFET and the DAC, as well as, for reading the Analog Digital Converter (ADC) output of the pressure sensor. This microcontroller was programmed in C code using IDE System Workbench for STM32 with a baud rate of 38,400 and a sampling frequency of 125 Hz. Simultaneously, the NUCLEO board communicates with a PC (l) through a serial protocol, and by implementing a serial terminal the user can set the desired air pressure values.
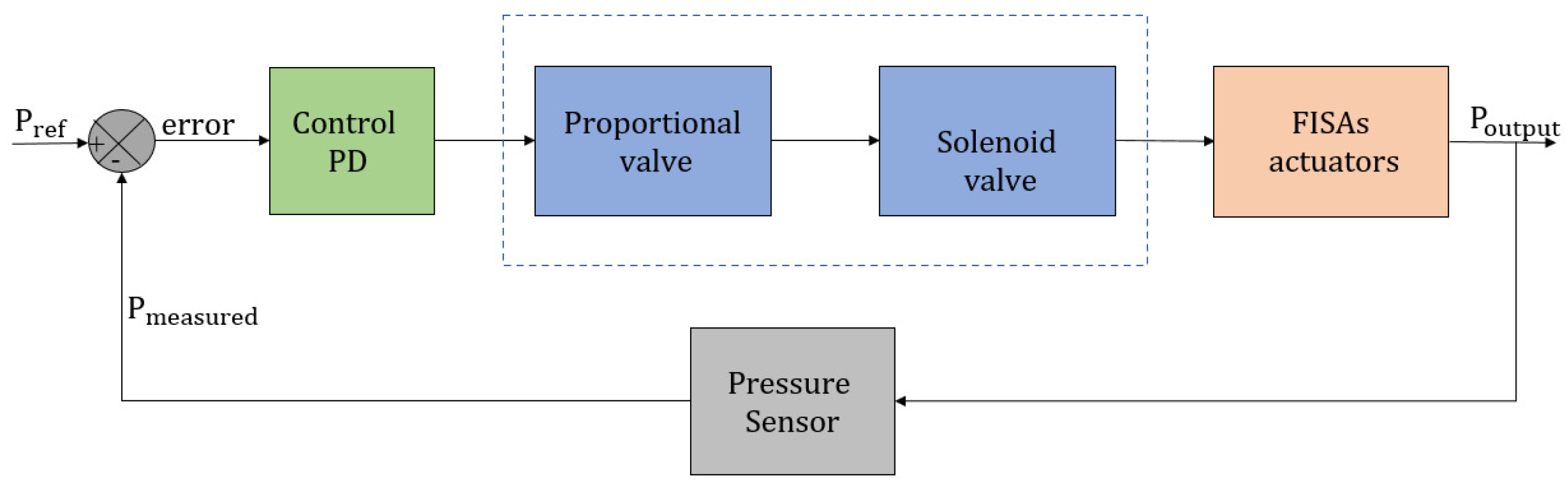
2.4. FISAs Control Design
2.4.1. Pressure Sensor Characterization
2.4.2. Determining PWM Frequency and Sampling Time
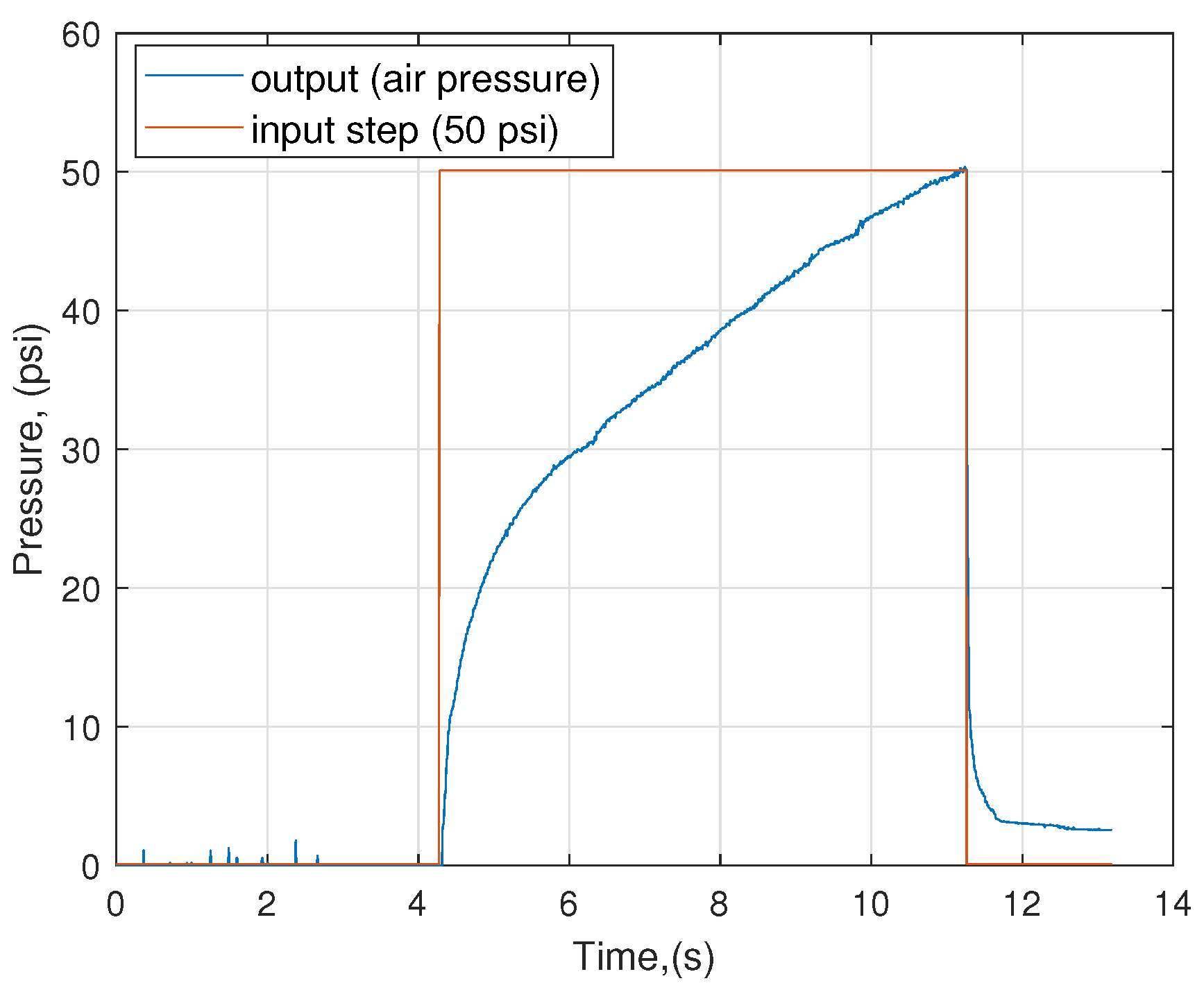
2.4.3. Transient Response and Transfer Function of the System
2.4.4. PD Controller Design Approach
3. Experimental Results
3.1. Inflation-Deflation Time
3.2. Range of Motion
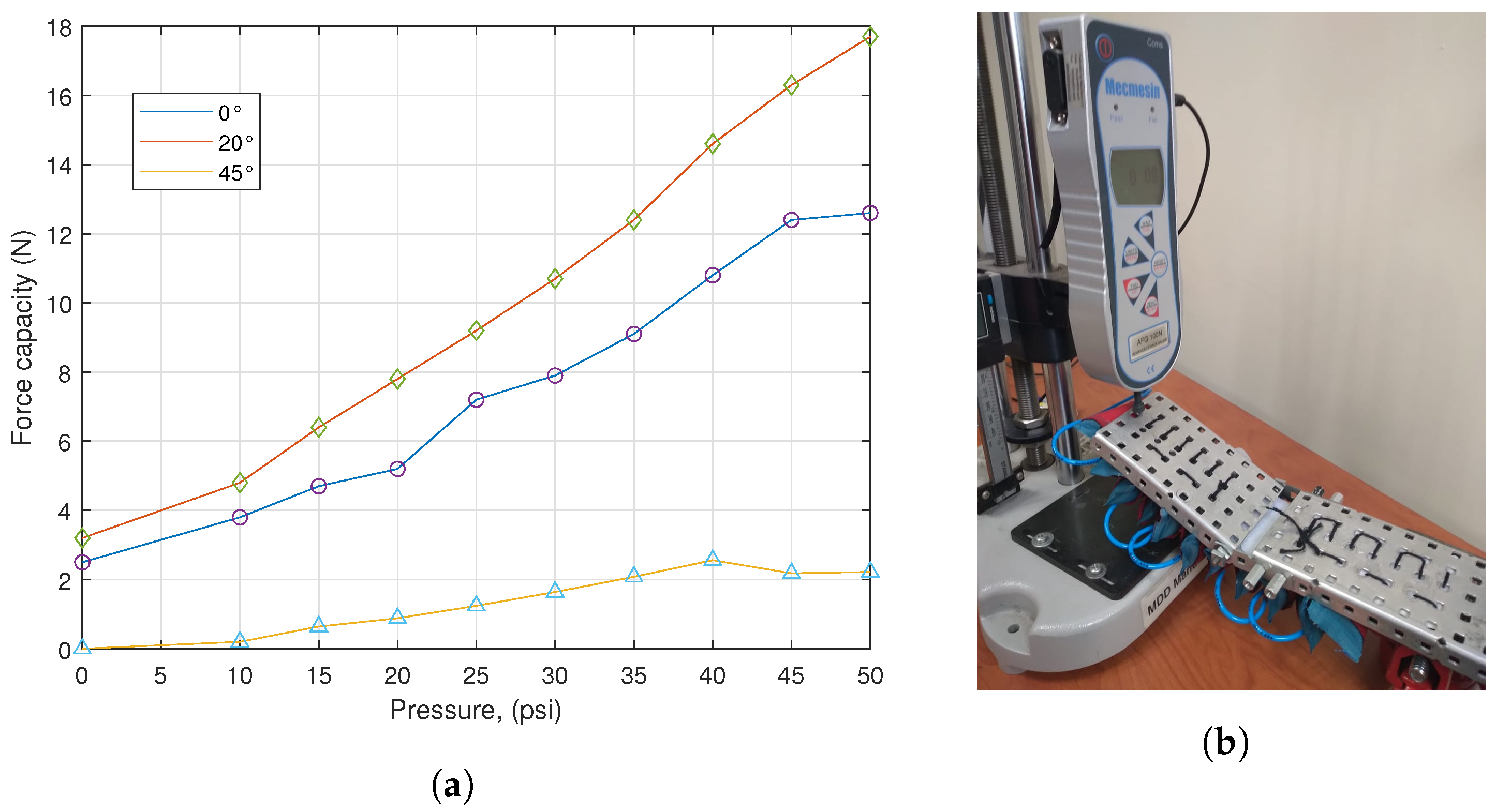
3.3. Output Force
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog Digital Converter |
| DAC | Digital Analog Converter |
| DIY | Do It Yourself |
| DOF | Degrees of Freedom |
| ESD | Electrostatic Discharge |
| FEAs | Fluid Elastomer actuators |
| FEM | Finite Element Method |
| FISAs | Fabric Inflatable Soft Actuators |
| LDPE | Low Density Polyethylene |
| PAMs | Pneumatic Artificial Muscles |
| PD | Proportional-Derivative |
| PID | Proportional-Integral-Derivative |
| PV | Proportional Valves |
| PVC | Polymerizing Vinyl Chloride |
| RCP | Rapid Control Prototyping |
| ROM | Range of Motion |
| SPAs | Soft Pneumatic Actuators |
| SV | Solenoid Valves |
| SWD | Soft Wearable Soft Devices |
| TPU | Themoplastic Polyurethane |
References
- Polygerinos, P.; Correll, N.; Morin, S.A.; Mosadegh, B.; Onal, C.D.; Petersen, K.; Cianchetti, M.; Tolley, M.T.; Shepherd, R.F. Soft Robotics: Review of Fluid Driven Intrinsically Soft Devices; Manufacturing, Sensing, Control, and Applications in Human-Robot Interaction. Adv. Eng. Mater. 2017, 19, 1700016. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Sparks, C.; Nuthi, S.G.; Vale, N.M.; Polygerinos, P. Soft Poly-Limbs: Toward a New Paradigm of Mobile Manipulation for Daily Living Tasks. Soft Robot. 2019, 6, 38–53. [Google Scholar] [CrossRef] [PubMed]
- Dávila-Vilchis, J.M.; Ávila Vilchis, J.C.; Vilchis-González, A.H.; LAZ-Avilés. Design Criteria of Soft Exogloves for Hand Rehabilitation-Assistance Tasks. Appl. Bionics Biomech. 2020, 2020, 2724783. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, P.H.; Mohd, I.B.I.; Sparks, C.; Arellano, F.L.; Zhang, W.; Polygerinos, P. Fabric Soft Poly-Limbs for Physical Assistance of Daily Living Tasks. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar] [CrossRef]
- Kaspar, A. Antagonistic actuation and stiffness control in soft inflatable robots. Nat. Rev. Mater. 2018, 3, 76–77. [Google Scholar] [CrossRef]
- Miriyev, A.; Stack, K.; Lipson, H. Soft material for soft actuators. Nat. Commun. 2017, 8, 596. [Google Scholar] [CrossRef] [PubMed]
- Yap, H.K.; Lim, J.H.; Goh, J.C.H.; Yeow, C.H. Design of a Soft Robotic Glove for Hand Rehabilitation of Stroke Patients with Clenched Fist Deformity Using Inflatable Plastic Actuators. J. Med. Devices 2016, 10, 044504. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Sridar, S.; Amatya, S.; Thalman, C.M.; Polygerinos, P. Fabric-Based Soft Grippers Capable of Selective Distributed Bending for Assistance of Daily Living Tasks. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 404–409. [Google Scholar] [CrossRef]
- Gorissen, B.; Reynaerts, D.; Konishi, S.; Yoshida, K.; Kim, J.W.; Volder, M.D. Elastic Inflatable Actuators for Soft Robotic Applications. Adv. Eng. Mater. 2017, 29, 1604977. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Eng. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef] [Green Version]
- Polygerinos, P.; Lyne, S.; Wang, Z.; Nicolini, L.F.; Mosadegh, B.; Whitesides, G.M.; Walsh, C.J. Towards a soft pneumatic glove for hand rehabilitation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1512–1517. [Google Scholar] [CrossRef]
- Hofer, M.; D’Andrea, R. Design, Modeling and Control of a Soft Robotic Arm. In Proceedings of the International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 1456–1463. [Google Scholar] [CrossRef]
- Paez-Granados, D.; Yamamoto, T.; Kadone, H.; Suzuki, K. Passive Flow Control for Series Inflatable Actuators: Application on a Wearable Soft-Robot for Posture Assistance. IEEE Robot. Autom. Lett. 2021, 6, 4891–4898. [Google Scholar] [CrossRef]
- Nishioka, Y.; Uesu, M.; Tsuboi, H.; Kawamura, S.; Masuda, W.; Yasuda, T.; Yamano, M. Development of a pneumatic soft actuator with pleated inflatable structures. Adv. Robot. 2017, 31, 753–762. [Google Scholar] [CrossRef]
- Oguntosin, V.; Harwin, W.S.; Kawamura, S.; Nasuto, S.J.; Hayashi, Y. Development of a wearable assistive soft robotic device for elbow rehabilitation. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015. [Google Scholar] [CrossRef]
- Thalman, C.M.; Lam, Q.P.; Nguyen, P.H.; Sridar, S.; Polygerinos, P. A Novel Soft Elbow Exosuit to Supplement Bicep Lifting Capacity. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar] [CrossRef]
- O’Neill, C.T.; Phipps, N.S.; Cappello, L.; Paganoni, S.; Walsh, C.J. A soft wearable robot for the shoulder: Design, characterization, and preliminary testing. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1672–1678. [Google Scholar] [CrossRef]
- Wang, Y.; Lo, B. A Soft Inflatable Elbow-Assistive Robot for Children with Cerebral Palsy. In Proceedings of the 2021 IEEE 17th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Virtual, 27–30 July 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Park, S.H.; Yi, J.; Kim, D.; Lee, Y.; Koo, H.S.; Park, Y.L. A Lightweight, Soft Wearable Sleeve for Rehabilitation of Forearm Pronation and Supination. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019. [Google Scholar] [CrossRef]
- Sridar, S.; Qiao, Z.; Muthukrishnan, N.; Zhang, W.; Polygerinos, P. A soft-inflatable exosuit for knee rehabilitation: Assisting swing phase during walking. Front. Robot. AI 2018, 5, 44. [Google Scholar] [CrossRef] [Green Version]
- Thuruthel George, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control Strategies for Soft Robotic Manipulators: A Survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Wu, L.; Lin, J.; Fang, B.; Sun, F. A novel mode controllable hybrid valve pressure control method for soft robotic gripper. Int. J. Adv. Robot. Syst. 2018, 15, 1–12. [Google Scholar] [CrossRef]
- Li, X.; Guo, C.; Liu, T.; Hong, L. Design, modeling and characterization of a joint for inflatable robotic arms. Mechatronics 2020, 65, 102311. [Google Scholar] [CrossRef]
- Pipan, M.; Herakovič, N. Volume flow characterization of PWM-controlled fast-switching pneumatic valves. Strojniški Vestnik J. Mech. Eng. 2016, 62, 543–550. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Lohse, N.; Jackson, M. Bending angle prediction and control of soft pneumatic actuators with embedded flex sensors—A data-driven approach. Mechatronics 2018, 50, 234–247. [Google Scholar] [CrossRef]
- Qiao, Z.; Nguyen, P.H.; Polygerinos, P.; Zhang, W. Dynamic Modeling and Motion Control of a Soft Robotic Arm Segment. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 5438–5443. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; Thieffry, M.; Goury, O.; Kruszewski, A.; Guerra, T.M.; Duriez, C.; Rus, D. Dynamically Closed-Loop Controlled Soft Robotic Arm using a Reduced Order Finite Element Model with State Observer. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 717–724. [Google Scholar] [CrossRef]
- Largilliere, F.; Verona, V.; Coevoet, E.; Sanz-Lopez, M.; Dequidt, J.; Duriez, C. Real-time Control of Soft-Robots using Asynchronous Finite Element Modeling. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 25–30 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Moseley, P.; Florez, J.M.; Sonar, H.A.; Gunjan Agarwal, W.C.; Paik, J. Modeling, design, and development of soft pneumatic actuators with finite element method. Adv. Eng. Mater. 2016, 18, 978–988. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Lopez-Arellano, F.; Zhang, W.; Polygerinos, P. Design, Characterization, and Mechanical Programming of Fabric-Reinforced Textile Actuators for a Soft Robotic Hand. In Proceedings of the International Conference on Intelligent Robots and Systems, Macau, China, 4–8 November 2019. [Google Scholar] [CrossRef]
- Nguyen, P.H. and Zhang, W. Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices. Sci. Rep. 2020, 10, 9638. [Google Scholar] [CrossRef]
- Gil-Agudo, A.; del Ama-Espinosa, A.; De la Pena-González, A.; Bernal-Sahún, A.; Rocón, E. Applications of Upper Limb Biomechanical Models in Spinal Cord Injury Patients. Biomech. Appl. 2011, 1, 129–164. [Google Scholar] [CrossRef]
- Dávila-Vilchis, J.M.; LAZ-Avilés; Ávila Vilchis, J.C.; Vilchis-González, A.H. Design Methodology for Soft Wearable Devices—The MOSAR Case. Appl. Sci. 2019, 9, 4727. [Google Scholar] [CrossRef]
- Ozlem, U.; Yeginoglu Gulay, C.E.; Nur, K.S. Estimation of Stature from Upper Extremity Anthropometric Measurements. J. Clin. Diagn. Res. 2019, 13, 9–15. [Google Scholar] [CrossRef]
- Nassour, J.; Hamker, F.H.; Cheng, G. High-Performance Perpendicularly-Enfolded-Textile Actuators for Soft Wearable Robots: Design and Realization. IEEE Trans. Med. Robot. Bionics 2020, 2, 309–319. [Google Scholar] [CrossRef]
- Park, J.; Choi, J.; Kim, S.J.; Seo, K.H.; Kim, J. Design of an Inflatable Wrinkle Actuator With Fast Inflation/Deflation Responses for Wearable Suits. IEEE Robot. Autom. Lett. 2020, 5, 3799–3805. [Google Scholar] [CrossRef]
- Jacinto-Villegas, J.M.; Portillo-Rodríguez, O.; Martinez-Mendez, R.; Daza-Merino, C.; Vilchis-González, A.H.; Avila-Vilchis, J.C. Sistema para control de posición basado en Rapid Control Prototyping (RCP) usando Simulink y SWB32. Komput. Sapiens 2019, 3, 11–15. [Google Scholar]
- Le, M.Q.; Pham, M.T.; Moreau, R.; Redarce, T. Comparison of a PWM and a hybrid force control for a pneumatic actuator using on/off solenoid valves. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, QC, Canada, 6–9 July 2010; pp. 1146–1151. [Google Scholar] [CrossRef]
- Astrom, K.J.; Hägglund, T. Control PID Avanzado; Pearson: Madrid, Spain, 2019. [Google Scholar]
- Osterkamp, L.K. Current Perspective on Assessment of Human Body Proportions of Relevance to Amputees. J. Am. Diet. Assoc. 1995, 95, 215–218. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inflatable Actuators | Dimensions | Pressure | Material | Weight | Interface |
|---|---|---|---|---|---|
| Soft modules [15] | 100 mm × 60 mm | 0–50 kPa | EcoFlex0030® | 350 g | Arduino |
| Soft Actuator [16] | 50 mm × 50 mm | 300 kPa | TPU-nylon | – | Arduino |
| Inflatable bladders [12] | 110 mm × 90 mm | 450 kPa | Rivertex 842® | – | (DS1104R&D) |
| Serial Inflatable actuators [13] | 60 mm × 350 mm | 20–50 kPa | PVC | – | – |
| Inflatable structures [14] | 50 mm × 300 mm | 20 kPa | LDPE | 13.2 g | Arduino |
| FISAs | 35 mm × 70 mm | 300 kPa | 200D TPU-nylon | 100 g | NUCLEO-STM32F767ZI™ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dávila-Vilchis, J.-M.; Ávila-Vilchis, J.C.; Vilchis-González, A.H.; Zúñiga-Avilés, L.A.; Jacinto-Villegas, J.M. Fabric Inflatable Soft Actuators for Soft Wearable Devices: The MOSAR Case. Machines 2022, 10, 871. https://doi.org/10.3390/machines10100871
Dávila-Vilchis J-M, Ávila-Vilchis JC, Vilchis-González AH, Zúñiga-Avilés LA, Jacinto-Villegas JM. Fabric Inflatable Soft Actuators for Soft Wearable Devices: The MOSAR Case. Machines. 2022; 10(10):871. https://doi.org/10.3390/machines10100871
Chicago/Turabian StyleDávila-Vilchis, Juana-Mariel, Juan Carlos Ávila-Vilchis, Adriana Herlinda Vilchis-González, Luis Adrián Zúñiga-Avilés, and Juan Manuel Jacinto-Villegas. 2022. "Fabric Inflatable Soft Actuators for Soft Wearable Devices: The MOSAR Case" Machines 10, no. 10: 871. https://doi.org/10.3390/machines10100871