
Numerical Solutions of Second-Order Elliptic Equations with C-Bézier Basis
Abstract
:1. Introduction
2. Preliminaries
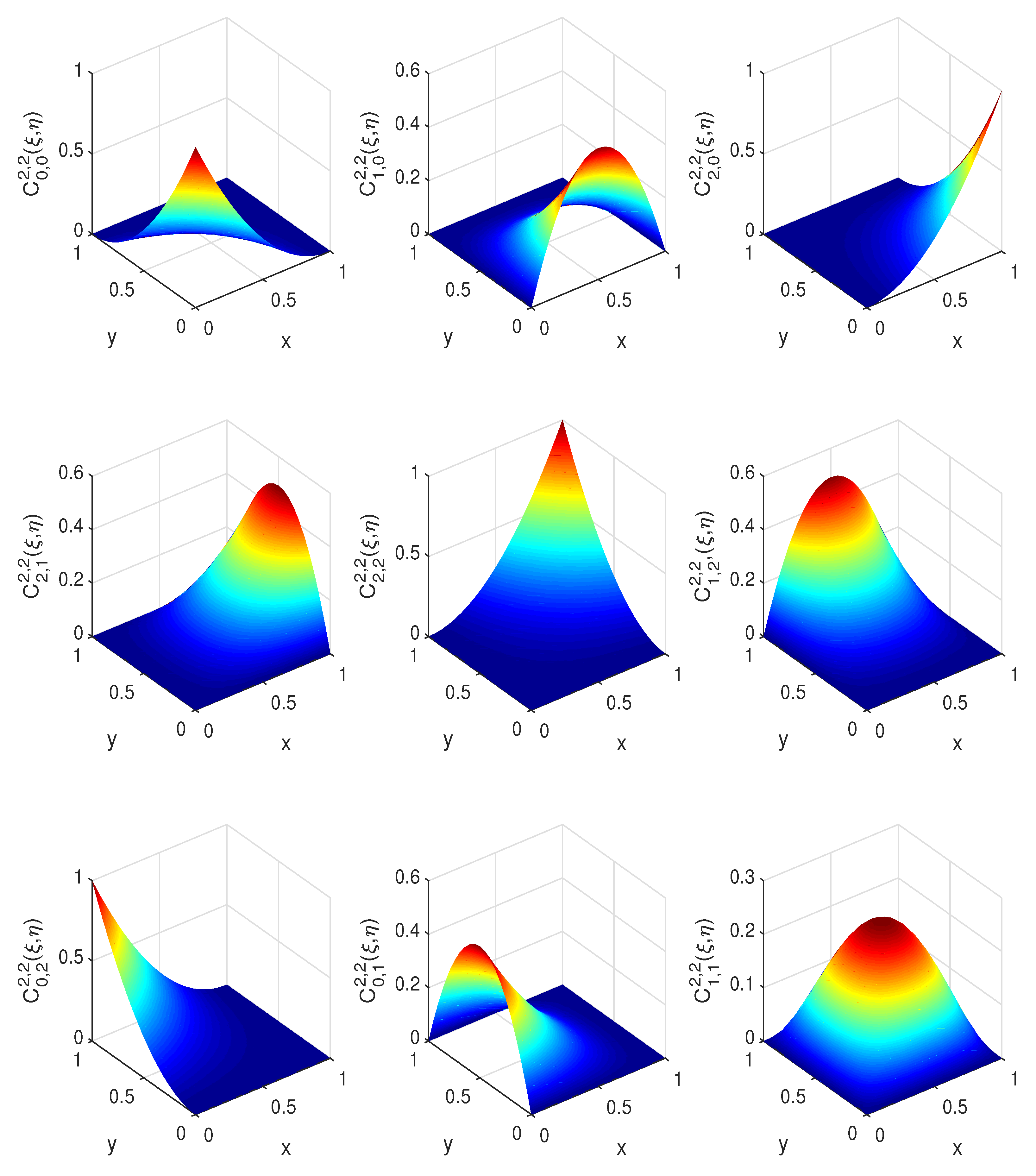
3. C-Bézier Basis, Curve, and Surface

4. C-Bézier Finite Element Schemes
| Algorithm 1 Steps of finite element method with C-Bézier basis functions |
|
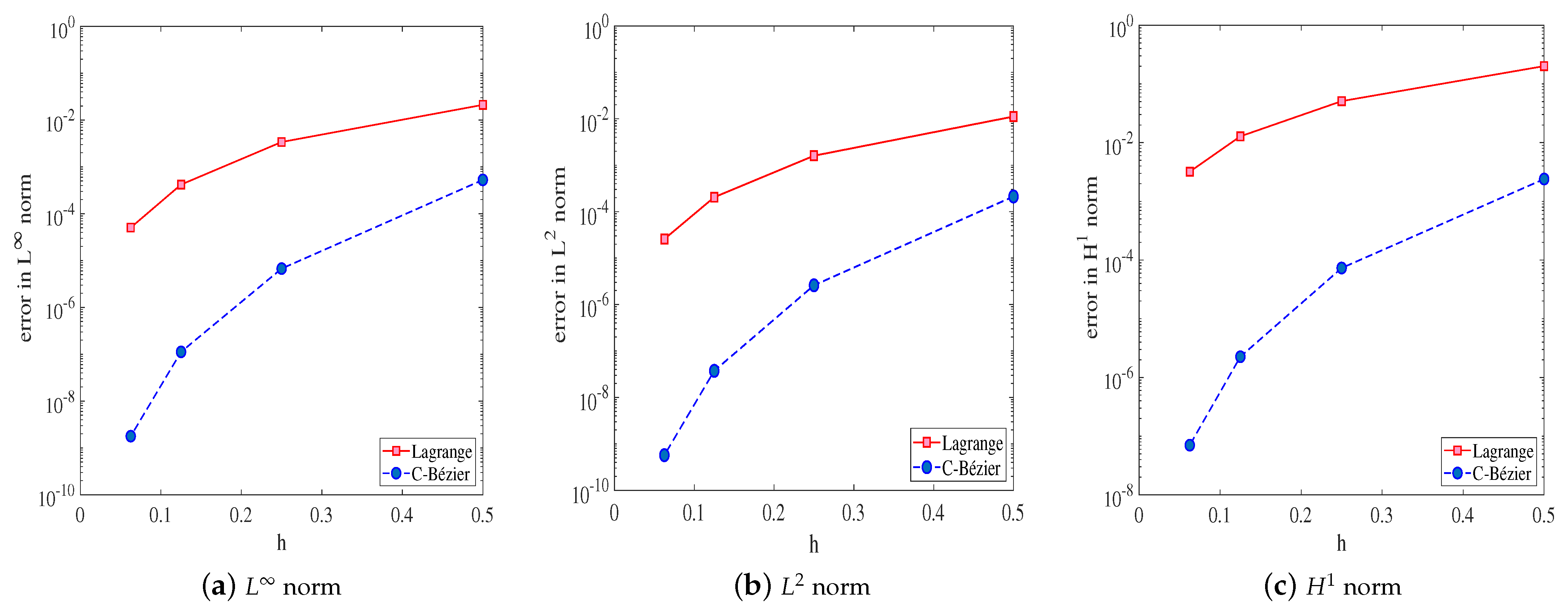
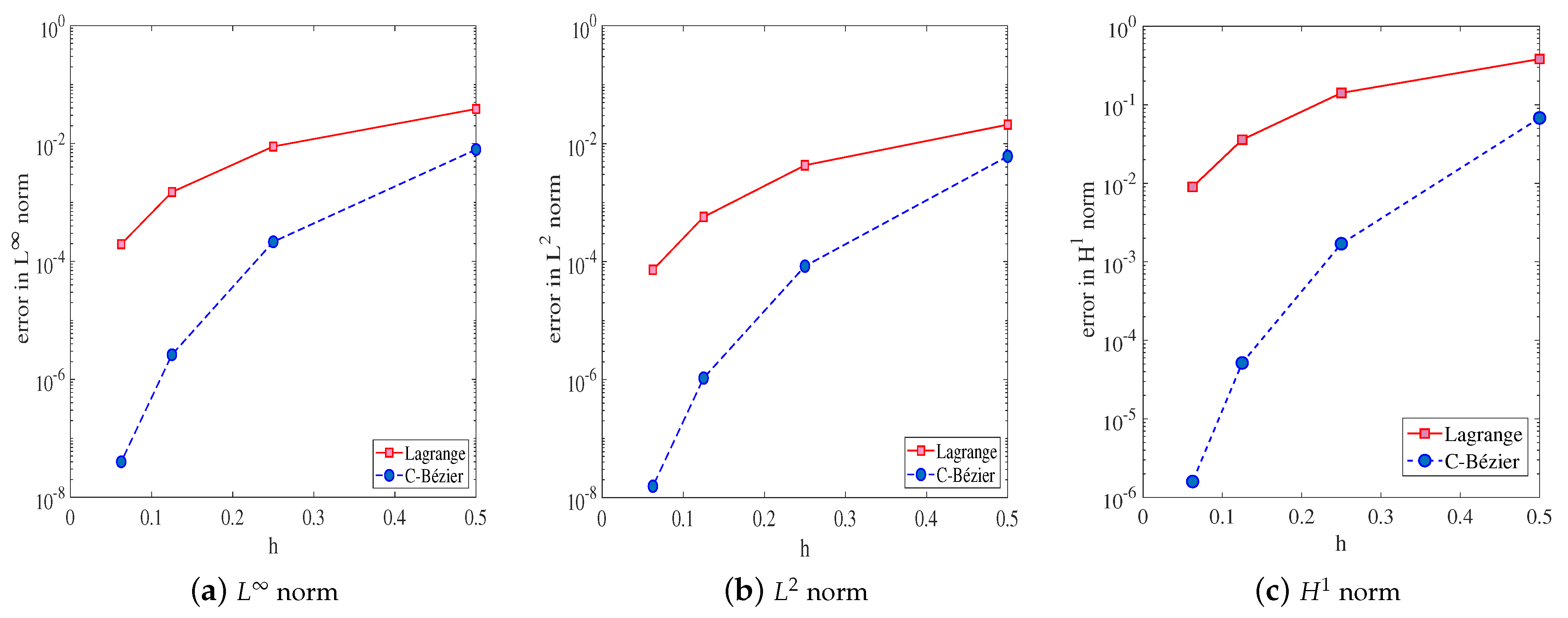
5. Approximation of Solutions with the C-Bézier Basis
6. Conclusions and Further Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, F. A Cascadic Adaptive Finite Element Method for Nonlinear Eigenvalue Problems in Quantum Physics. Multiscale Model. Simul. 2020, 18, 198–220. [Google Scholar] [CrossRef]
- Arora, R.; Zhang, X.; Acharya, A. Finite element approximation of finite deformation dislocation mechanics. Comput. Methods Appl. Mech. Eng. 2020, 367, 113076. [Google Scholar] [CrossRef]
- Fu, G.; Xu, Z. High-order space-time finite element methods for the Poisson-Nernst-Planck equations: Positivity and unconditional energy stability. Comput. Methods Appl. Mech. Eng. 2021, 395, 115031. [Google Scholar] [CrossRef]
- Courant, R. Variational Methods for the Solution of Problems of Equilibrium and Vibration. Bull. Am. Math. Soc. 1943, 49, 1–23. [Google Scholar] [CrossRef]
- Feng, K. Difference scheme based on variational principle. Appl. Comput. Math. 1965, 2, 238–262. [Google Scholar]
- Clough, R.L. Thoughts about the origin of the finite element method. Comput. Struct. 2001, 79, 2029–2030. [Google Scholar] [CrossRef]
- Clough, R.L. Early history of the finite element method from the view point of a pioneer. Int. J. Numer. Meth. Eng. 2004, 60, 283–287. [Google Scholar] [CrossRef]
- Hu, H. Correct application of generalized variational principle of elasticity to approximate solution. Siam. J. Multiscale. Model. Sim. 1989, 19, 1159–1166. [Google Scholar]
- Clough, R.W. The Finite Element Method in Plane Stress Analysis. In Proceedings of the Asce Conference on Electronic Computation, Pittsburgh, PA, USA, 8–10 September 1960. [Google Scholar]
- Babuka, I. Error-bounds for finite element method. Numer. Math. 1971, 16, 322–333. [Google Scholar] [CrossRef]
- Li, H.; Wang, D.; Song, Z.; Zhang, F. Numerical analysis of an unconditionally energy-stable reduced-order finite element method for the Allen-Cahn phase field model. Comput. Math. Appl. 2021, 96, 67–76. [Google Scholar] [CrossRef]
- Kawecki, E.L. Finite element theory on curved domains with applications to discontinuous Galerkin finite element methods. Numer. Methods Partial. Differ. Equ. 2020, 36, 1492–1536. [Google Scholar] [CrossRef]
- Csati, Z.; Moes, N.; Massart, T.J. A stable extended/generalized finite element method with Lagrange multipliers and explicit damage update for distributed cracking in cohesive materials. Comput. Methods Appl. Mech. Eng. 2020, 369, 113173. [Google Scholar] [CrossRef]
- Alcntara, A.A.; Carmo, B.A.; Clark, H.R.; Guardia, R.R.; Rincon, M.A. On a nonlinear problem with Dirichlet and Acoustic boundary conditions. Appl. Math. Comput. 2021, 411, 126514–126533. [Google Scholar] [CrossRef]
- Bhatti, M.I.; Bracken, B.P. Solutions of differential equations in a Bernstein polynomial basis. J. Comput. Appl. Math. 2007, 205, 272–280. [Google Scholar] [CrossRef]
- Tang, Y.; Yin, Z. Hermite Finite Element Method for a Class of Viscoelastic Beam Vibration Problem. Engineering 2021, 13, 463–471. [Google Scholar] [CrossRef]
- Ebrahimi, F. A C1 finite element method for axisymmetric lipid membranes in the presence of the Gaussian energy. Comput. Methods Appl. Mech. Eng. 2022, 391, 114472. [Google Scholar] [CrossRef]
- Pais, A.I.; Lves, J.L.; Belinha, J. Using a radial point interpolation meshless method and the finite element method for application of a bio-inspired remodelling algorithm in the design of optimized bone scaffold. J. Braz. Soc. Mech. Sci. 2021, 43, 557. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Cottrell, J.A.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Engineering 2005, 194, 4135–4195. [Google Scholar] [CrossRef]
- Zhu, C.; Kang, W. Numerical solution of Burgers-Fisher equation by cubic B-spline quasi-interpolation. Appl. Math. Comput. 2020, 216, 2679–2686. [Google Scholar] [CrossRef]
- Li, T.; Chen, F.; Du, Q. Adaptive finite element methods for elliptic equations over hierarchical T-meshes. J. Comput. Appl. Math. 2011, 236, 878–891. [Google Scholar]
- Kang, H.; Lai, M.; Li, X. An economical representation of PDE solution by using compressive sensing approach. Comput.-Aided Des. 2019, 115, 78–86. [Google Scholar] [CrossRef]
- Kacimi, A.E.; Ouazar, D.; Mohamed, M.S.; Seaid, M.; Trevelyan, J. Enhanced conformal perfectly matched layers for Bernstein-Bézier finite element modeling of short wave scattering. Engineering 2019, 355, 614–638. [Google Scholar]
- Peng, X.; Xu, G.; Zhou, O.; Yang, Y.; Ma, Z. An adaptive Bernstein-Bézier finite element method for heat transfer analysis in welding. Adv. Eng. Softw. 2020, 148, 102855. [Google Scholar] [CrossRef]
- Sevilla, R.; Fernández-Méndez, S.; Huerta, A. NURBS-enhanced finite element method (NEFEM). Arch. Comput. Methods Eng. 2011, 18, 441–484. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, G. A class of Bézier-like curves. Comput. Aided Geom. Des. 2003, 20, 29–39. [Google Scholar] [CrossRef]
- Sun, L.; Su, F. Application of C-Bézier and H-Bézier basis in solving heat conduction problems. J. Xinyang Norm. Univ. (Nat. Sci. Ed.) 2022, 35, 1–6. [Google Scholar]
- Sun, L.; Su, F. Application of C-Bézier and H-Bézier basis functions to numerical solution of convection-diffusion equations. Bound. Value. Probl. 2022, 2022, 66. [Google Scholar] [CrossRef]
- Sun, L.; Pang, K. Numerical solution of unsteady elastic equations with C-Bézier basis functions. AIMS Math. 2024, 9, 702–722. [Google Scholar] [CrossRef]
- Badia, S.; Verdugoand, F.; Alberto, F. The aggregated unfitted finite element method for elliptic problems. Comput. Methods Appl. Mech. Eng. 2021, 336, 533–553. [Google Scholar] [CrossRef]
- Guan, Q.; Gunzburger, M.; Zhao, W. Weak-Galerkin finite element methods for a second-order elliptic variational inequality. Comput. Methods Appl. Mech. Eng. 2018, 337, 677–688. [Google Scholar] [CrossRef]
- Bramble, J.H.; Xu, J. Some estimates for a weighted L2 projection. Math. Comput. 1991, 56, 463–470. [Google Scholar]
- Chen, Z.; Tuo, R.; Zhang, W. A finite element method for elliptic problems with observational boundary data. Comput. Appl. Math. 2020, 38, 355–372. [Google Scholar]
- Li, R.; Liu, B. Numerical Solutions for Differential Equations; Academic Press: Cambridge, MA, USA, 1997; pp. 252–253. [Google Scholar]
- Wang, J.; Ye, X. A weak Galerkin Finite Element Method for Second-Order Elliptic Problems. J. Comput. Appl. Math. 2013, 241, 103–115. [Google Scholar] [CrossRef]
- Coelho, K.O.; Devloo, P.; Gomes, S.M. Error estimates for the Scaled Boundary Finite Element Method. Comput. Math. 2021, 379, 113765. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, Y.; Yi, N. Error analysis of a decoupled, linear and stable finite element method for Cahn–Hilliard–Navier–Stokes equations. Appl. Math. Comput. 2022, 421, 126928. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basis | CPU Time (s) | |||||||
|---|---|---|---|---|---|---|---|---|
| Lagrange | - | - | 0.614 | |||||
| - | - | 0.295 | ||||||
| - | - | 1.026 | ||||||
| - | - | 4.414 | ||||||
| C-Bézier | 0.239 | |||||||
| 0.285 | ||||||||
| 1.050 | ||||||||
| 4.316 |
| Basis | CPU Time (s) | |||||||
|---|---|---|---|---|---|---|---|---|
| Lagrange | - | - | 0.209 | |||||
| - | - | 0.321 | ||||||
| - | - | 1.236 | ||||||
| - | - | 4.226 | ||||||
| C-Bézier | 0.084 | |||||||
| 0.345 | ||||||||
| 1.152 | ||||||||
| 4.339 |
| Basis | CPU Time (s) | |||||||
|---|---|---|---|---|---|---|---|---|
| Lagrange | - | - | 0.227 | |||||
| - | - | 0.291 | ||||||
| - | - | 1.123 | ||||||
| - | - | 4.243 | ||||||
| C-Bézier | 0.076 | |||||||
| 0.287 | ||||||||
| 1.059 | ||||||||
| 4.459 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Su, F.; Pang, K. Numerical Solutions of Second-Order Elliptic Equations with C-Bézier Basis. Axioms 2024, 13, 84. https://doi.org/10.3390/axioms13020084
Sun L, Su F, Pang K. Numerical Solutions of Second-Order Elliptic Equations with C-Bézier Basis. Axioms. 2024; 13(2):84. https://doi.org/10.3390/axioms13020084
Chicago/Turabian StyleSun, Lanyin, Fangming Su, and Kunkun Pang. 2024. "Numerical Solutions of Second-Order Elliptic Equations with C-Bézier Basis" Axioms 13, no. 2: 84. https://doi.org/10.3390/axioms13020084