
Global Fixed-Time Sliding Mode Trajectory Tracking Control Design for the Saturated Uncertain Rigid Manipulator
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- For the sake of eliminating the effect of external environment disturbance and uncertainty on the system, the novel adaptive fixed-time sliding mode disturbance observer (AFSMDO) is presented while guaranteeing the fixed-time convergence of the observer. This method can not only break the limitation that the disturbance observer depends on a constant upper bound of the disturbance’s change rate but also improve the disturbance estimation accuracy of the observer by adjusting the parameters adaptively.
- (2)
- The nonlinear functions considering the tracking error of the manipulator are introduced into the nonlinear fixed-time sliding mode control (NFSMC) to solve the singularity problem of FTSMC. Based on the FTSMC, the tracking error of the manipulator converges to the arbitrarily small zero region in the fixed time by effective combination with the designed AFSMDO.
- (3)
- In view of the situation that the input torque of the manipulator trajectory tracking control system is too large, leading to the supersaturation of the manipulator, the fixed-time saturation compensator (FTSC) is designed in this paper. When the manipulator’s actuator torque occurs saturation, the FTSC can efficiently adjust the control input by introducing a saturation function so that the designed control strategy can maintain the operation of the manipulator normally and protect the manipulator from damage. Additionally, compared to the other saturation compensators in previous literature, the NFSMC-AFSMDO combined with the proposed saturation compensator can effectively improve the manipulator trajectory tracking speed and reduce joint chattering.
2. Preliminaries and Notions
2.1. Preliminaries
2.2. Notions
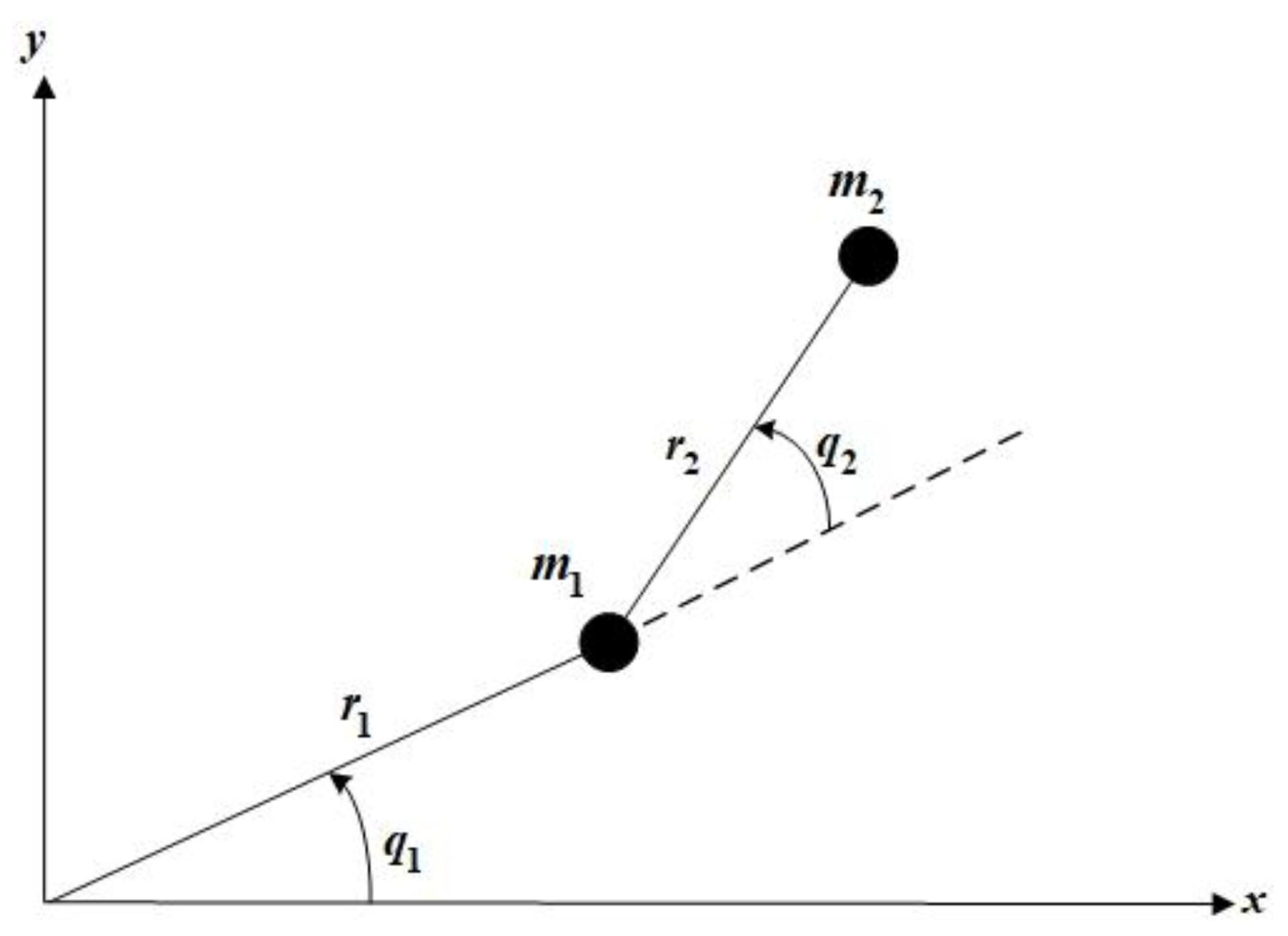
2.3. Dynamic Model of the Manipulator
3. System Control Scheme Design
3.1. The Design of the Adaptive Fixed-Time Sliding Mode Disturbance Observer
3.2. Nonsingular Fixed-Time Sliding Mode Controller Design
3.3. Fixed-Time Saturation Compensator Design
4. Stability Analysis
4.1. Analysis of Stability in the Reaching Phase
4.2. Analysis of Stability in the Sliding Phase
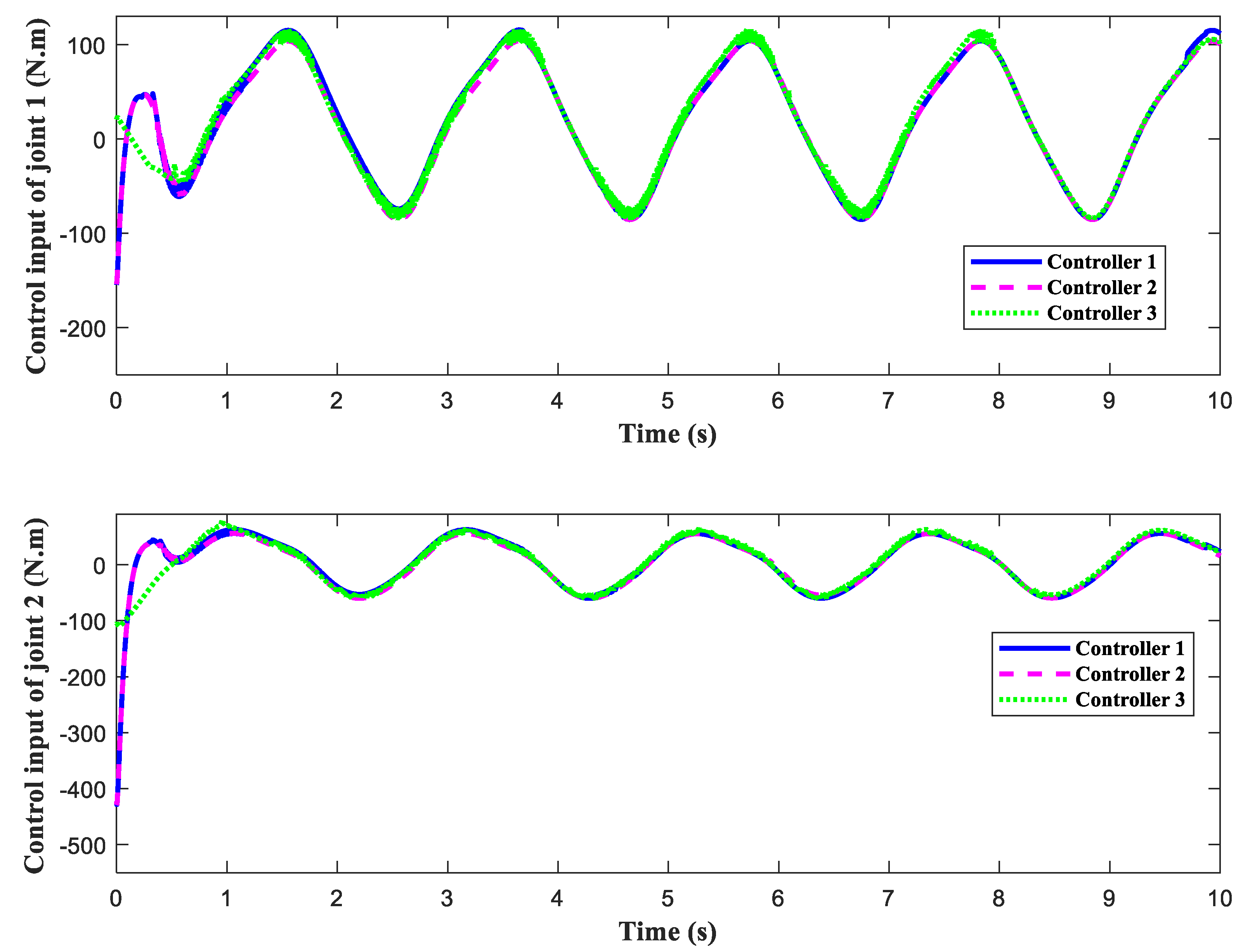
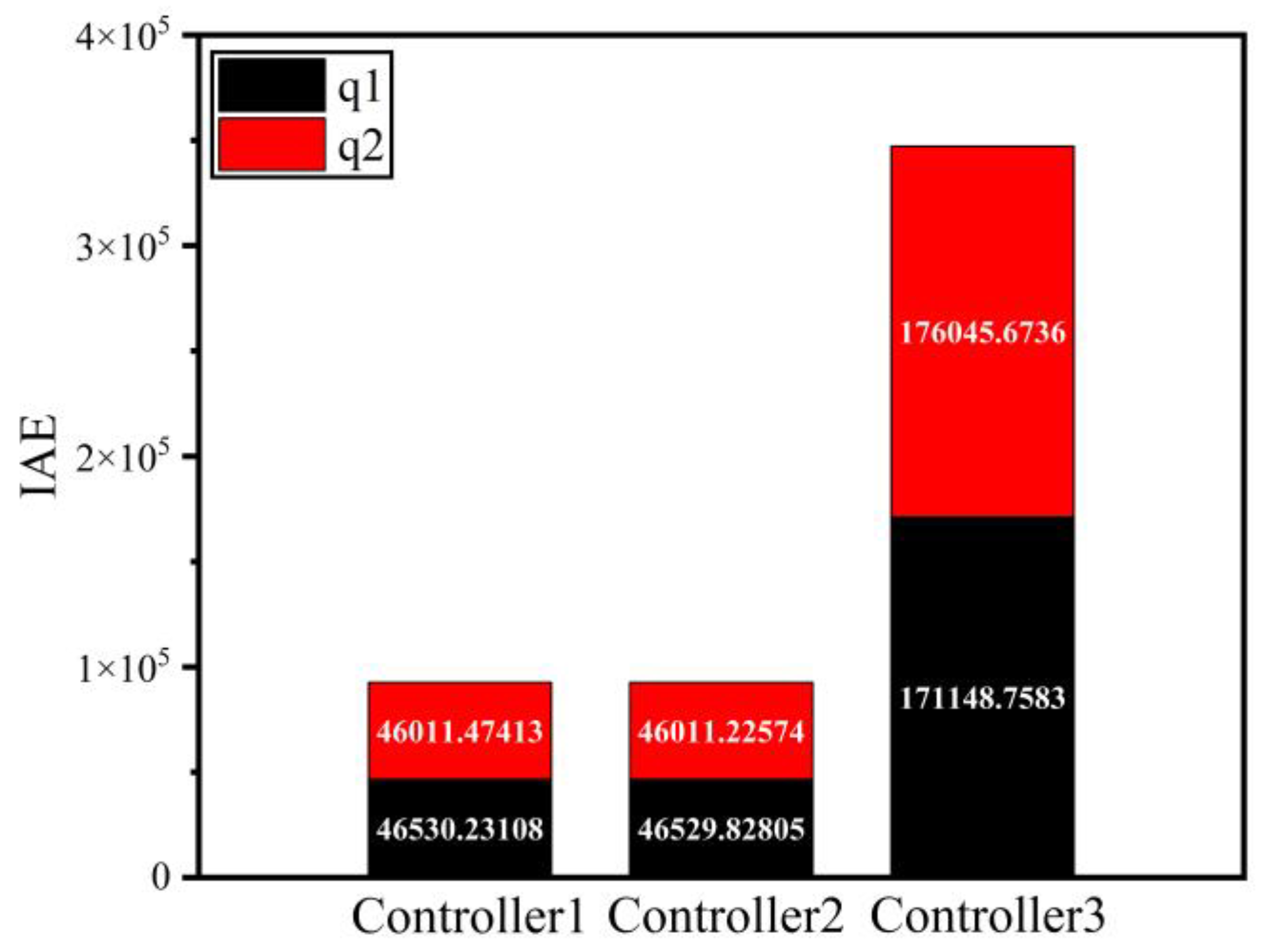
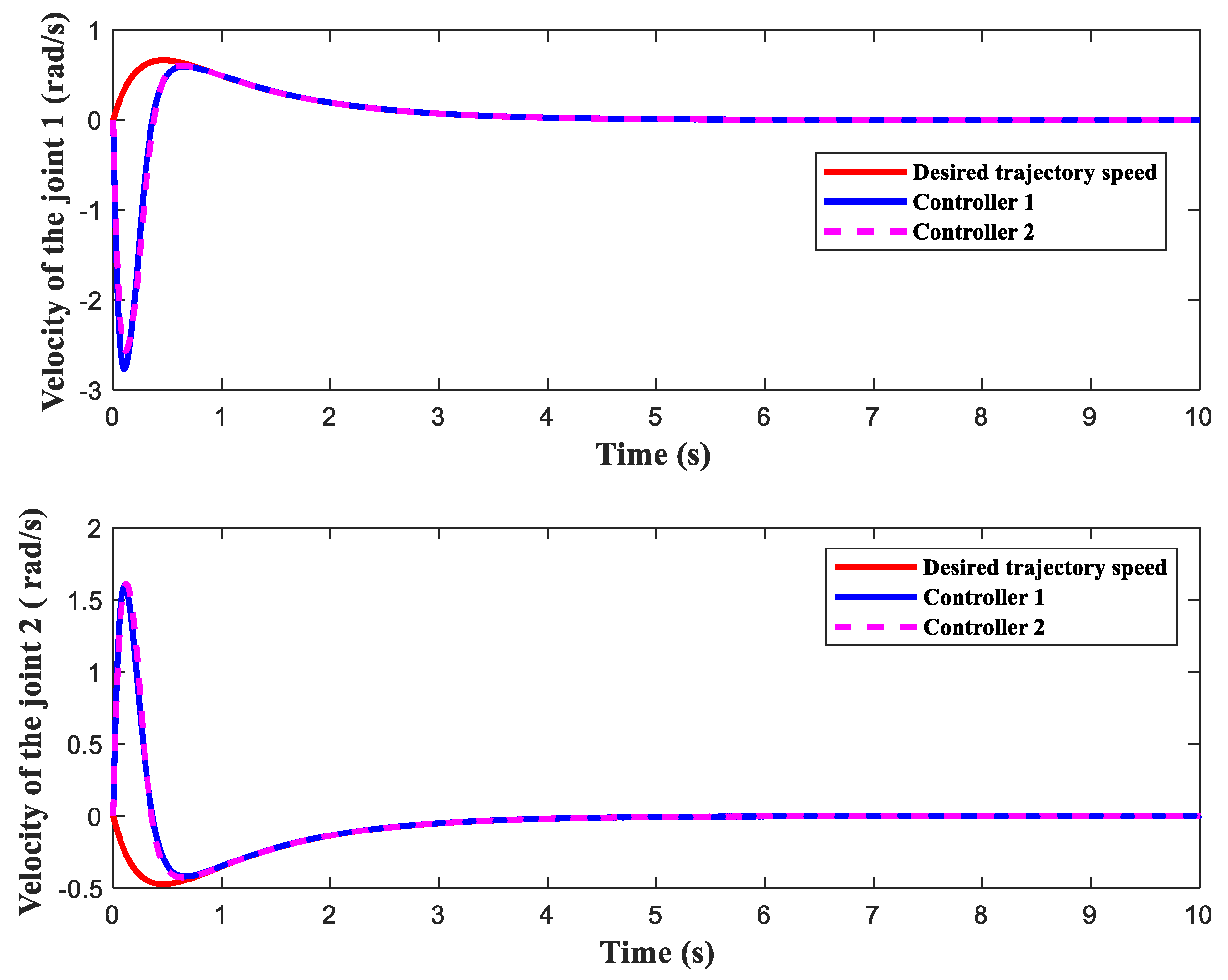
5. Simulation Comparisons
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aner, E.A.; Awad, M.I.; Shehata, O.M. Modeling and Trajectory Tracking Control for a Multi-Section Continuum Manipulator. J. Intell. Robot. Syst. 2023, 108, 49. [Google Scholar] [CrossRef]
- Pan, Q.; Li, Y.; Ma, B.; An, T.; Zhou, F. Event-triggered-based Decentralized Optimal Control of Modular Robot Manipulators Using RNN Identifier. J. Intell. Robot. Syst. 2022, 106, 55. [Google Scholar] [CrossRef]
- Cai, W.; Liu, Z.; Zhang, M.; Wang, C. Cooperative Artificial Intelligence for underwater robotic swarm. Robot. Auton. Syst. 2023, 164, 104410. [Google Scholar] [CrossRef]
- Yang, Y.; Cui, K.; Shi, D.; Mustafa, G.; Wang, J. PID control with PID event triggers: Theoretic analysis and experimental results. Control. Eng. Pract. 2022, 128, 105322. [Google Scholar] [CrossRef]
- Zhao, C.; Guo, L. Towards a theoretical foundation of PID control for uncertain nonlinear systems. Automatica 2022, 142, 110360. [Google Scholar] [CrossRef]
- Hernandez-Gonzalez, M.; Hernandez-Vargas, E. Discrete-time super-twisting controller using neural networks. Neurocomputing 2021, 447, 235–243. [Google Scholar] [CrossRef]
- Gassara, H.; Boukattaya, M.; El Hajjaji, A. Polynomial Adaptive Observer-Based Fault Tolerant Control for Time Delay Polynomial Fuzzy Systems Subject to Actuator Faults. Int. J. Fuzzy Syst. 2023, 25, 1327–1337. [Google Scholar] [CrossRef]
- Sun, C. Robust Finite Time Tracking Control for Robotic Manipulators Based on Nonsingular Fast Terminal Sliding Mode. Int. J. Control. Autom. Syst. 2022, 20, 3285–3295. [Google Scholar] [CrossRef]
- Yu, H.-P.; Wang, M.; Yang, J.; Xiong, J.-J. A Parallel-Structure-Based Sliding Mode Control for Trajectory Tracking of a Quadrotor UAV. J. Electr. Eng. Technol. 2023, 18, 3911–3924. [Google Scholar] [CrossRef]
- Ding, C.; Ding, S.; Wei, X.; Mei, K. Output feedback sliding mode control for path-tracking of autonomous agricultural vehicles. Nonlinear Dyn. 2022, 110, 2429–2445. [Google Scholar] [CrossRef]
- Chen, Y.; Jiang, C.; Dong, J.; Zhao, Z. Output feedback sliding mode control based on non-singular terminal sliding mode observer. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2023, 237, 939–949. [Google Scholar] [CrossRef]
- Yin, Z.; Yan, W.; Bintao, Z.; He, Z. Velocity-free adaptive nonsingular fast terminal sliding mode finite-time attitude tracking control for spacecraft. Asian J. Control. 2023, 25, 3687–3698. [Google Scholar] [CrossRef]
- Lian, S.; Meng, W.; Lin, Z.; Shao, K.; Zheng, J.; Li, H.; Lu, R. Adaptive Attitude Control of a Quadrotor Using Fast Nonsingular Terminal Sliding Mode. IEEE Trans. Ind. Electron. 2022, 69, 1597–1607. [Google Scholar] [CrossRef]
- Yao, M.; Xiao, X.; Tian, Y.; Cui, H. A fast terminal sliding mode control scheme with time-varying sliding mode surfaces. J. Frankl. Inst.-Eng. 2021, 358, 5386–5407. [Google Scholar] [CrossRef]
- Zhai, J.; Xu, G. A Novel Non-Singular Terminal Sliding Mode Trajectory Tracking Control for Robotic Manipulators. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 391–395. [Google Scholar] [CrossRef]
- Lian, S.; Meng, W.; Shao, K.; Zheng, J.; Zhu, S.; Li, H. Full Attitude Control of a Quadrotor Using Fast Nonsingular Terminal Sliding Mode With Angular Velocity Planning. IEEE Trans. Ind. Electron. 2022, 70, 3975–3984. [Google Scholar] [CrossRef]
- Han, Q.; Tuo, X.; Tang, Y.; He, P. Finite-Time Attitude Cooperative Control of Multiple Unmanned Aerial Vehicles via Fast Nonsingular Terminal Sliding Mode Control. Wirel. Commun. Mob. Comput. 2022, 2022, 4324626. [Google Scholar] [CrossRef]
- Ding, S.; Park, J.H.; Chen, C.-C. Second-order sliding mode controller design with output constraint. Automatica 2020, 112, 108704. [Google Scholar] [CrossRef]
- Mi, W.; Luo, L.; Zhong, S. Fixed-Time Consensus Tracking for Multi-Agent Systems With a Nonholomonic Dynamics. IEEE Trans. Autom. Control 2023, 68, 1161–1168. [Google Scholar] [CrossRef]
- Cai, Z.; Huang, L.; Wang, Z. Novel Fixed-Time Stability Criteria for Discontinuous Nonautonomous Systems: Lyapunov Method With Indefinite Derivative. IEEE Trans. Cybern. 2022, 52, 4286–4299. [Google Scholar] [CrossRef]
- Ji, Y.; Chen, L.; Zhang, J.; Zhang, D.; Shao, X. Non-singular fixed-time pose tracking control for spacecraft with dead-zone input. Aircr. Eng. Aerosp. Technol. 2022, 94, 1390–1408. [Google Scholar] [CrossRef]
- Tian, Y.; Du, C.; Lu, P.; Jiang, Q.; Liu, H. Nonsingular fixed-time attitude coordinated tracking control for multiple rigid spacecraft. ISA Trans. 2022, 129, 243–256. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Xu, F.; Liu, X.; Gu, S.; Geng, H. Fixed-Time Dynamic Surface Control for Pneumatic Manipulator System With Unknown Disturbances. IEEE Robot. Autom. Lett. 2022, 7, 10890–10897. [Google Scholar] [CrossRef]
- Wei, X.; You, L.; Zhang, H.; Hu, X.; Han, J. Disturbance observer based control for dynamically positioned ships with ocean environmental disturbances and actuator saturation. Int. J. Robust Nonlinear Control. 2022, 32, 4113–4128. [Google Scholar] [CrossRef]
- Razmjooei, H.; Shafiei, M.H.; Palli, G.; Arefi, M.M. Non-linear Finite-Time Tracking Control of Uncertain Robotic Manipulators Using Time-Varying Disturbance Observer-Based Sliding Mode Method. J. Intell. Robot. Syst. 2022, 104, 36. [Google Scholar] [CrossRef]
- Sun, L.; Sun, G.; Jiang, J. Disturbance observer-based saturated fixed-time pose tracking for feature points of two rigid bodies. Automatica 2022, 144, 110475. [Google Scholar] [CrossRef]
- Ma, C.; Tang, Y.; Lei, M.; Jiang, D.; Luo, W. Trajectory tracking control for autonomous underwater vehicle with disturbances and input saturation based on contraction theory. Ocean Eng. 2022, 266, 112731. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, M.; Zhang, C.; Zeng, J. Decentralized formation trajectory tracking control of multi-AUV system with actuator saturation. Ocean Eng. 2022, 255, 111423. [Google Scholar] [CrossRef]
- Guo, G.; Li, P.; Hao, L.-Y. A New Quadratic Spacing Policy and Adaptive Fault-Tolerant Platooning With Actuator Saturation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1200–1212. [Google Scholar] [CrossRef]
- Huang, S.; Yang, Y.; Yan, Y.; Zhang, S.; Liu, Z. Observer-Based Robust Finite-Time Trajectory Tracking Control for a Stratospheric Satellite Subject to External Disturbance and Actuator Saturation. Int. J. Aerosp. Eng. 2022, 2022, 1601771. [Google Scholar] [CrossRef]
- Sai, H.; Xu, Z.; He, S.; Zhang, E.; Zhu, L.; Wang, C.; Li, X.; Cui, L.; Wang, Y.; Liang, M.; et al. Adaptive nonsingular fixed-time sliding mode control for uncertain robotic manipulators under actuator saturation. ISA Trans. 2022, 123, 46–60. [Google Scholar] [CrossRef] [PubMed]
- Lin, X.; Nie, J.; Jiao, Y.; Liang, K.; Li, H. Nonlinear adaptive fuzzy output-feedback controller design for dynamic positioning system of ships. Ocean Eng. 2018, 158, 186–195. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Hou, Y.; Li, H. Fixed-Time Sliding Mode Control for Uncertain Robot Manipulators. IEEE Access 2019, 7, 149750–149763. [Google Scholar] [CrossRef]
- Shi, R.; Zhang, X. Adaptive Fractional-order Non-singular Fast Terminal Sliding Mode Control Based on Fixed Time Observer. Proc. Inst. Mech. Eng. Part C-J. Eng. Mech. Eng. Sci. 2022, 236, 7006–7016. [Google Scholar] [CrossRef]
- Wu, C.; Yan, J.; Lin, H.; Wu, X.; Xiao, B. Fixed-time disturbance observer-based chattering-free sliding mode attitude tracking control of aircraft with sensor noises. Aerosp. Sci. Technol. 2021, 111, 106565. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.; Zhao, Z.; Tang, X.; Yang, J.; Chen, I.-M. Finite-time disturbance observer-based trajectory tracking control for flexible-joint robots. Nonlinear Dyn. 2021, 106, 459–471. [Google Scholar] [CrossRef]

























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, J.; Hao, L.; Lu, X.; Wang, H.; Sheng, C. Global Fixed-Time Sliding Mode Trajectory Tracking Control Design for the Saturated Uncertain Rigid Manipulator. Axioms 2023, 12, 883. https://doi.org/10.3390/axioms12090883
Nie J, Hao L, Lu X, Wang H, Sheng C. Global Fixed-Time Sliding Mode Trajectory Tracking Control Design for the Saturated Uncertain Rigid Manipulator. Axioms. 2023; 12(9):883. https://doi.org/10.3390/axioms12090883
Chicago/Turabian StyleNie, Jun, Lichao Hao, Xiao Lu, Haixia Wang, and Chunyang Sheng. 2023. "Global Fixed-Time Sliding Mode Trajectory Tracking Control Design for the Saturated Uncertain Rigid Manipulator" Axioms 12, no. 9: 883. https://doi.org/10.3390/axioms12090883