
The Dynamics of a General Model of the Nonlinear Difference Equation and Its Applications


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Definitions and Preliminary Results
- S1.
- If for all there is a such that for all , for , with , then is said to be locally stable.
- S2.
- If is locally stable and there is such that for , with , then is said to be locally asymptotically stable.
- S3.
- If for all , , then is said to be a global attractor.
- S4.
- If is locally stable and a global attractor, then it is said to be globally asymptotically stable.
- S5.
- If is not locally stable, then it is said to be unstable.
- (a)
- and , for all ,
- (b)
- The DIEhas no solutions of prime period two in .
3. Dynamics of Equation (1)
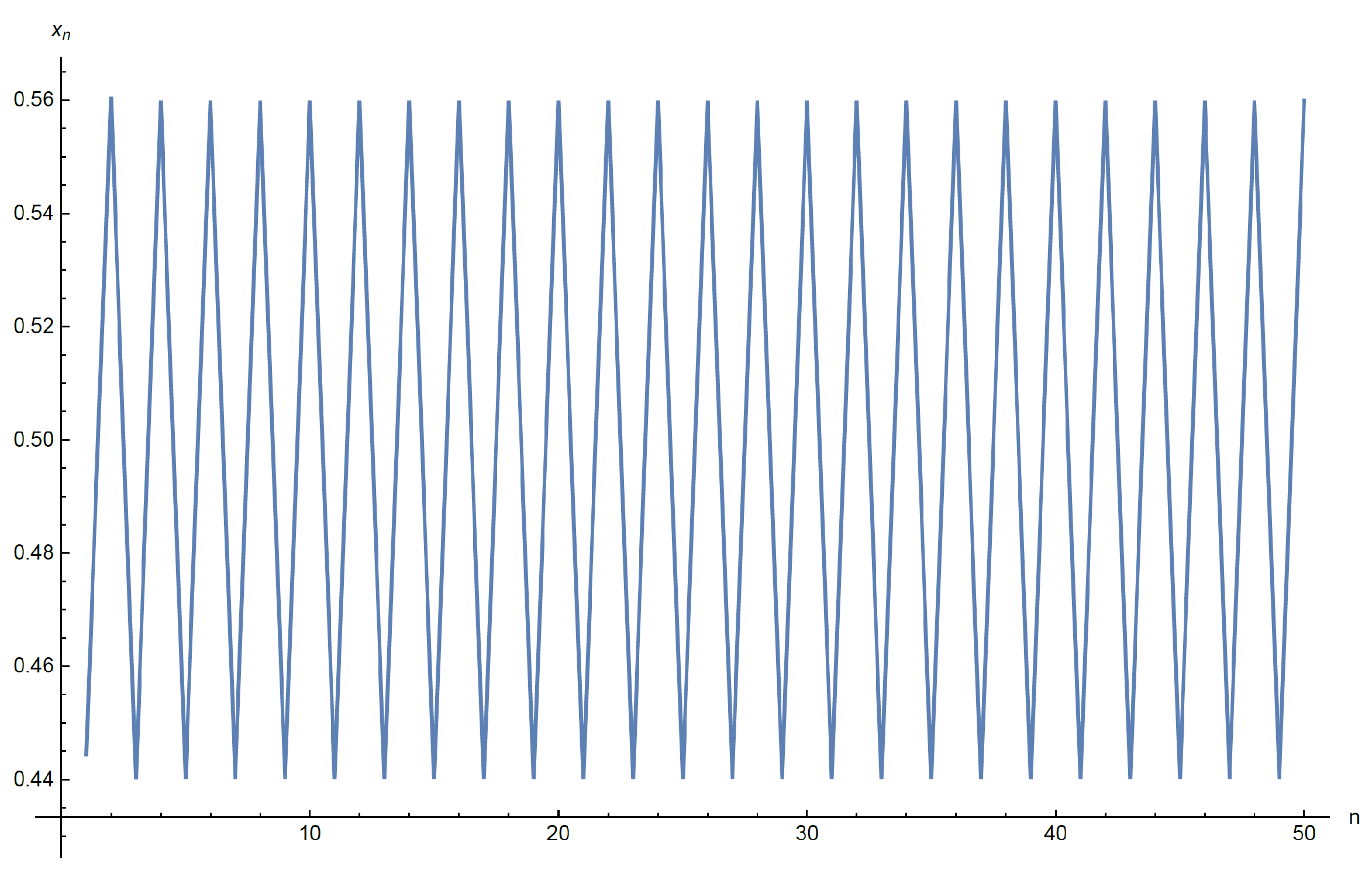
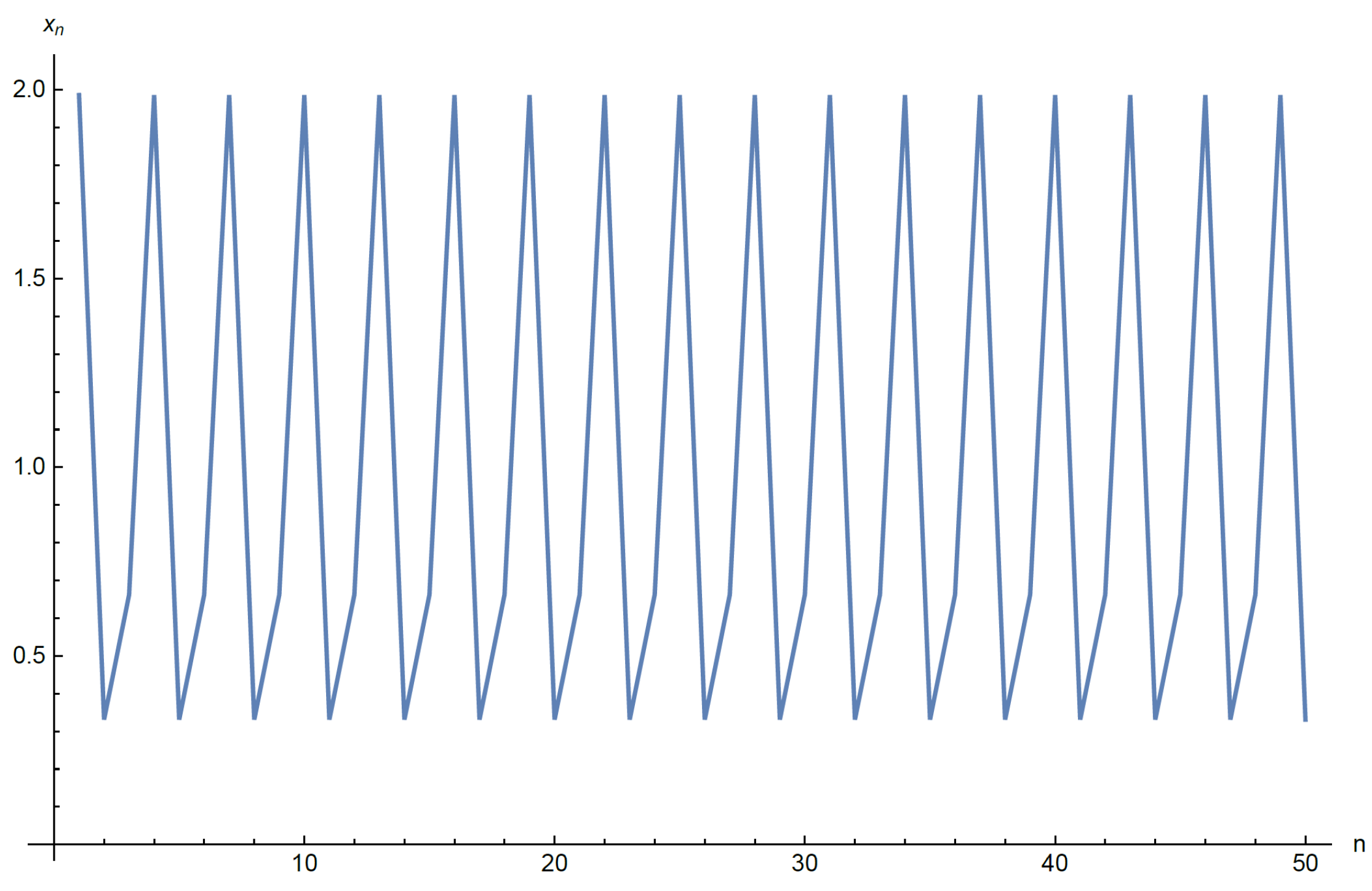
3.1. Periodic Behavior of Solutions
3.1.1. Existence of Prime Period-Two Solutions
3.1.2. Local Asymptotic Stability of a Two Cycle
3.1.3. Existence of Prime Period-Three Solutions
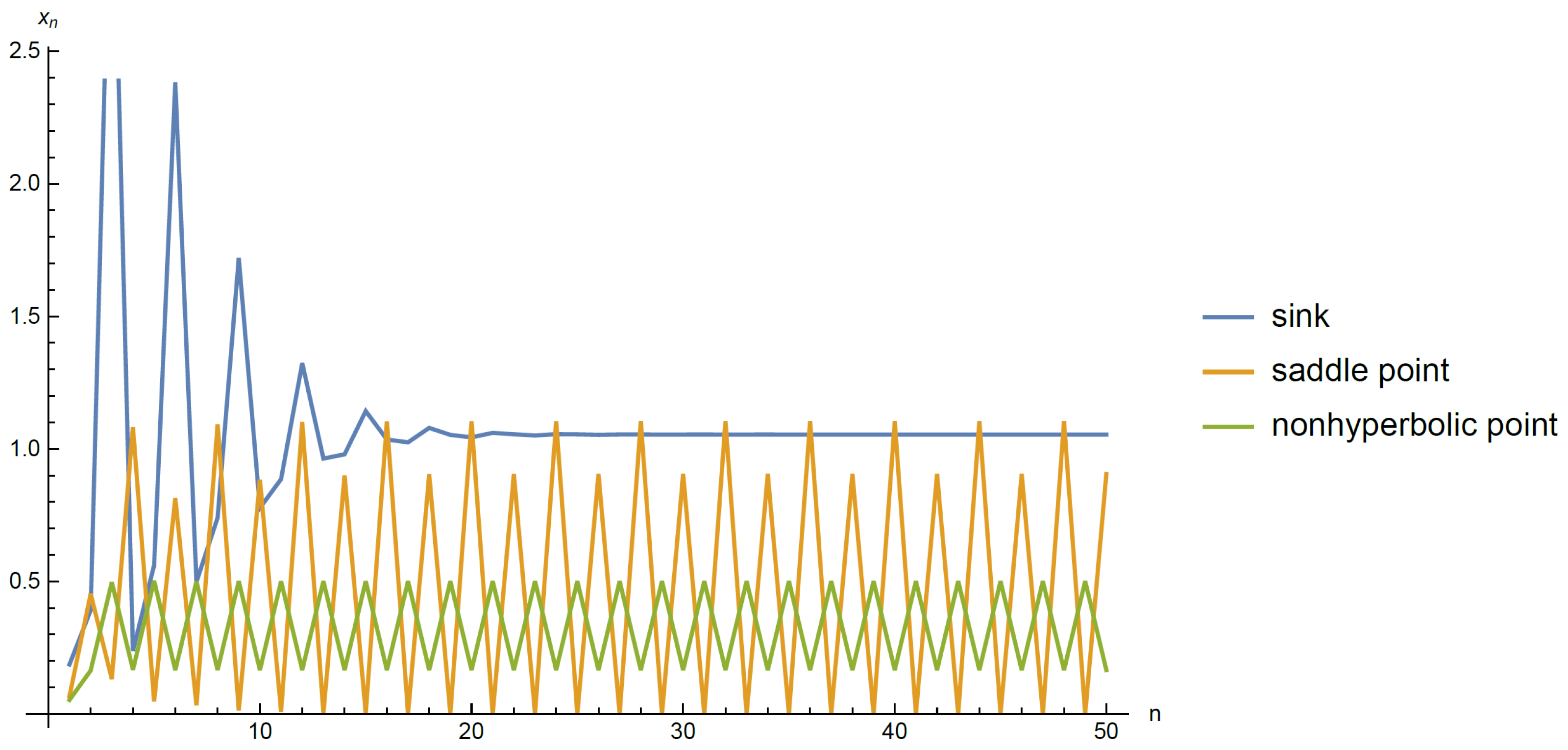
3.2. Stability Behavior of Solutions
- (a)
- is repeller if
- (b)
- is a saddle point if
- (c)
- is a nonhyperbolic point if
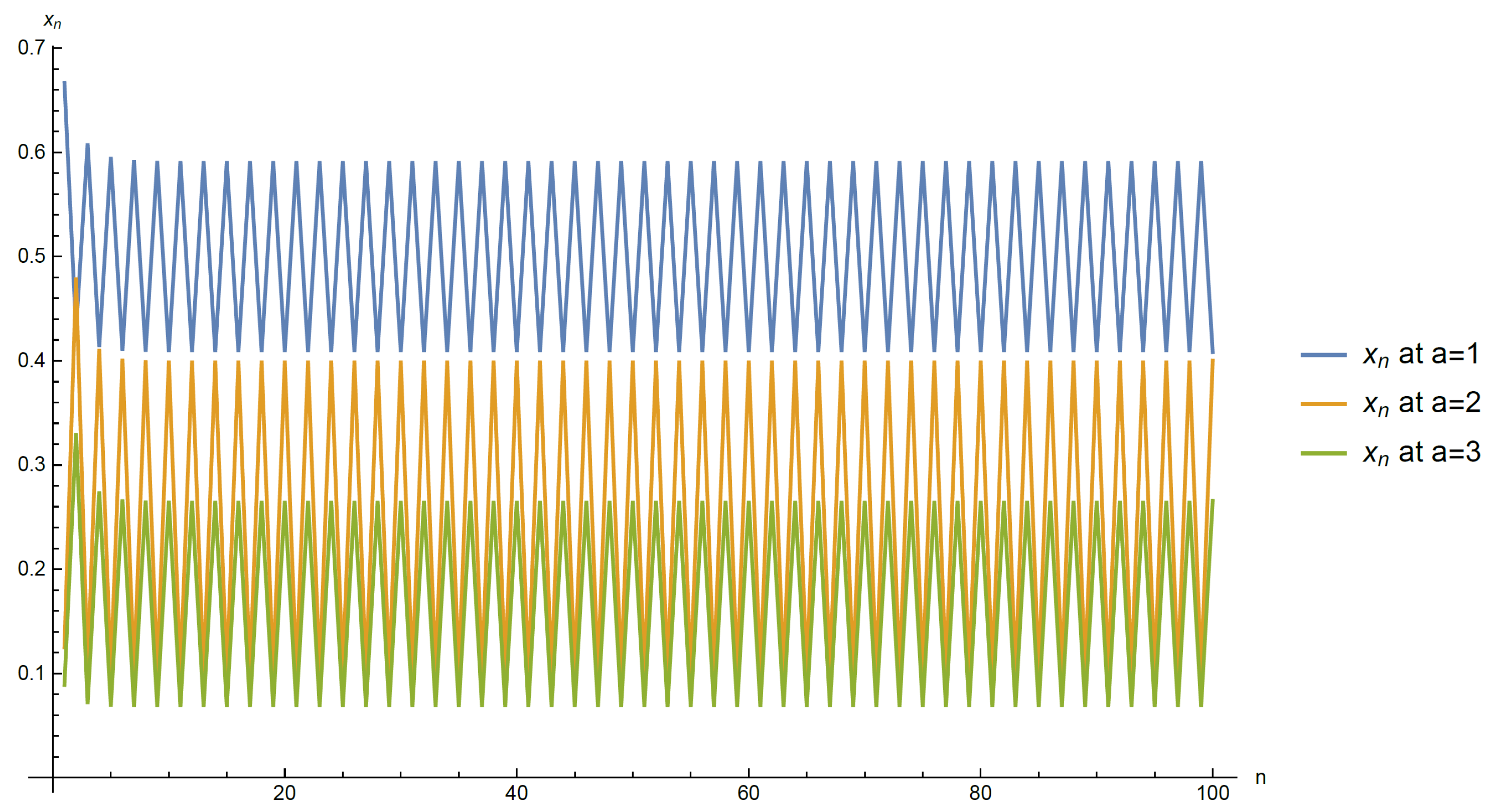
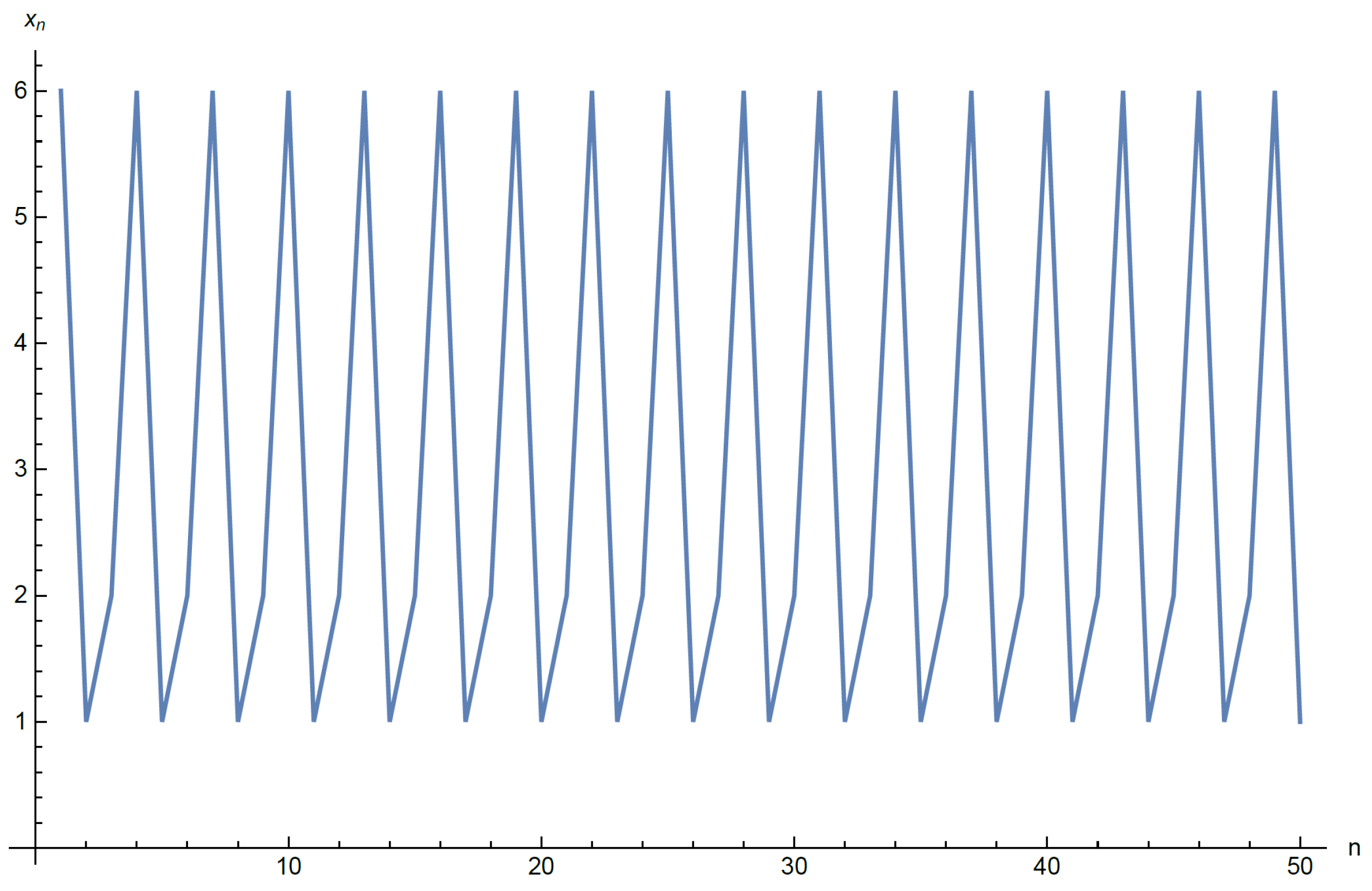
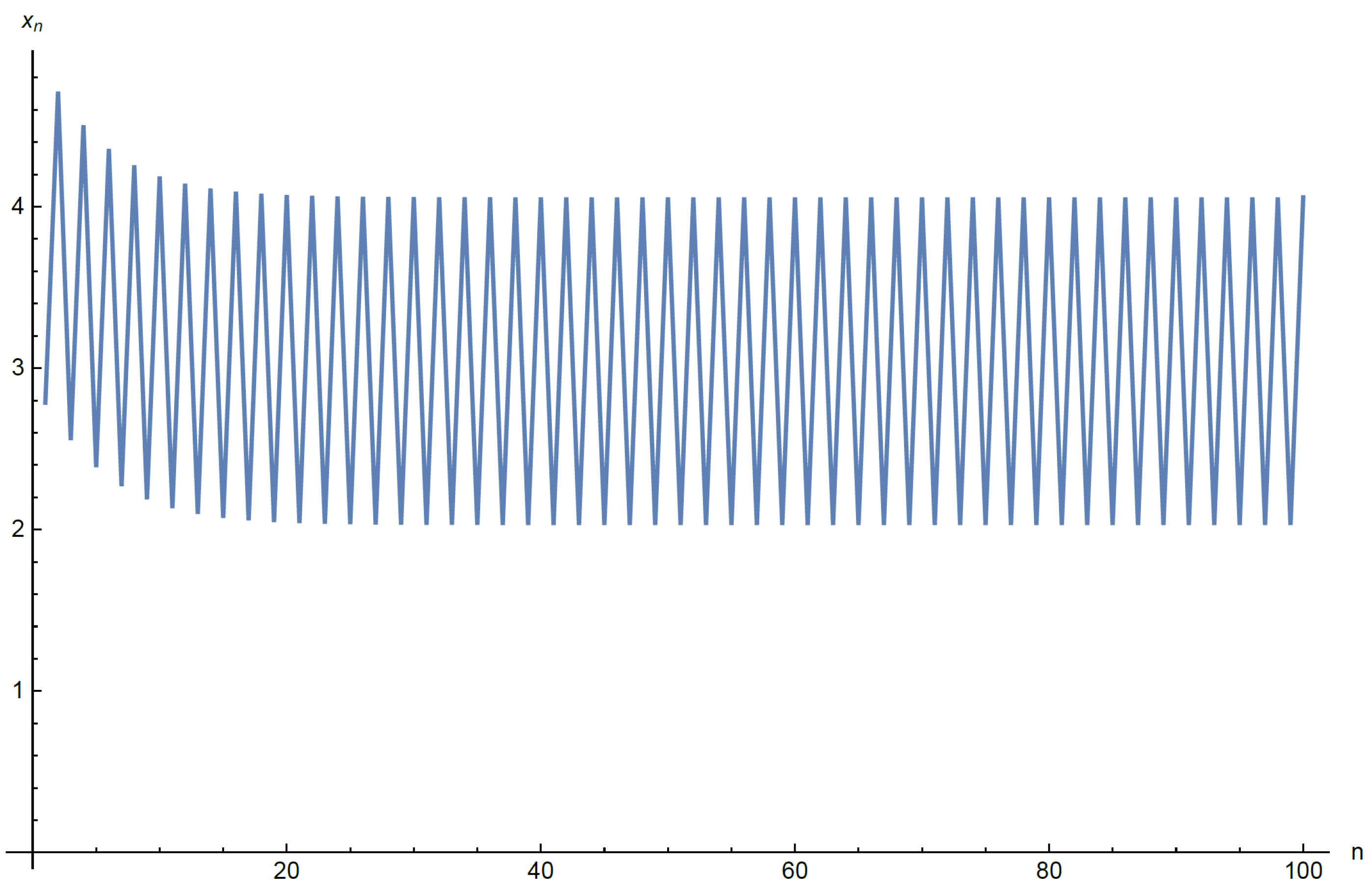
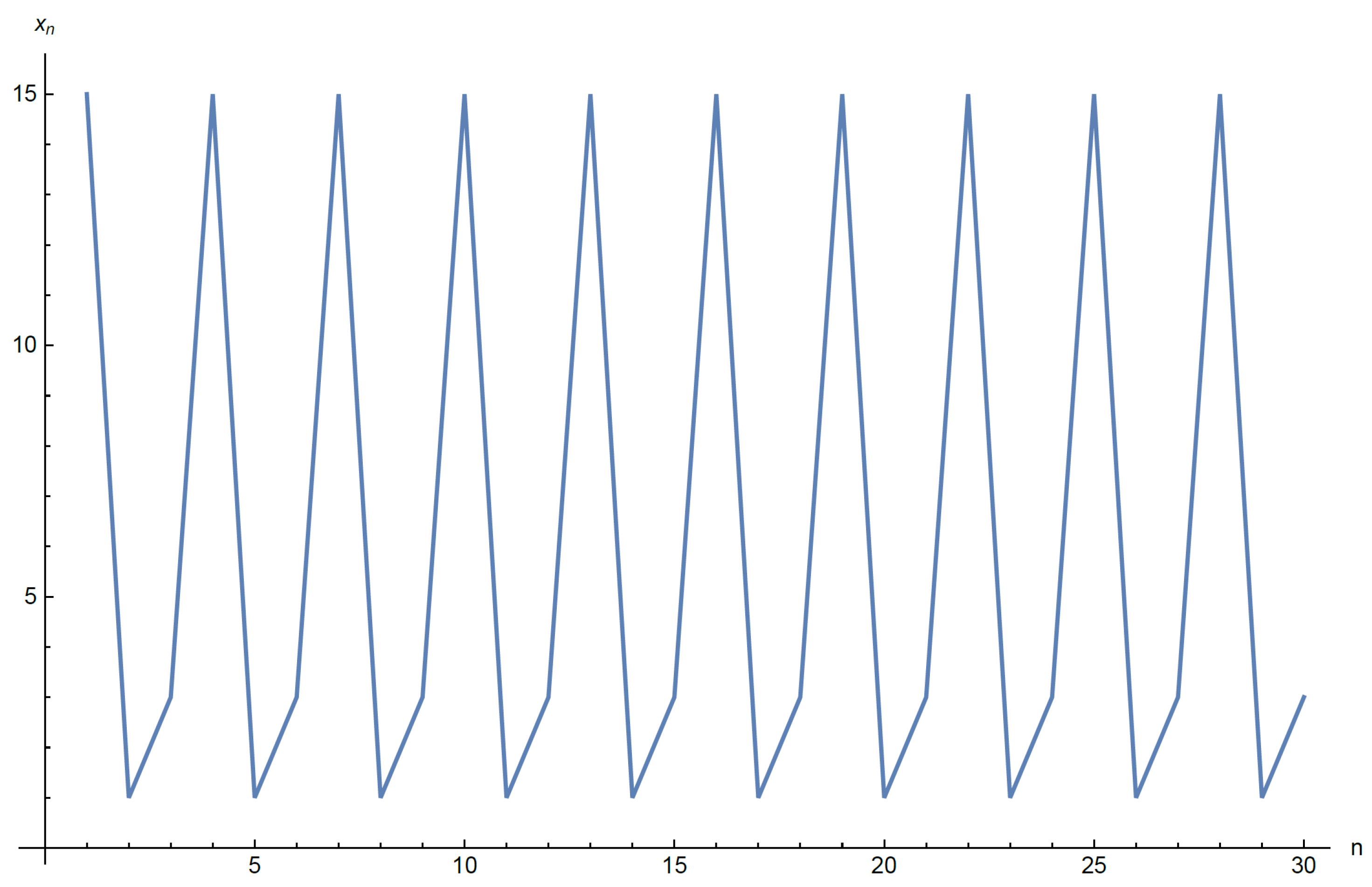
3.3. Examples and Numerical Simulations
3.3.1. Special Case 1
3.3.2. Special Case 2
- Assume that . We note that . Then, every solution of DIE (22) converges to if .
3.3.3. Special Case 3
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kiguradze, I.T.; Chaturia, T.A. Asymptotic Properties of Solutions of Nonatunomous Ordinary Differential Equations; Kluwer Academic Publishers: Drodrcht, The Netherlands, 1993. [Google Scholar]
- Agarwal, R.P. Difference Equations and Inequalities, Theory, Methods and Applications, 2nd ed.; Marcel Dekker: New York, NY, USA, 2000. [Google Scholar]
- Ahlabrandt, C.D.; Peterson, A.C. Discrete Hamiltonian Systems: Difference Equations, Continued Fractions and Reccati Equations; Kluwer Academic Publishers: Drodrcht, The Netherlands, 1996. [Google Scholar]
- Elaydi, S. An Introduction to Difference Equations; Springer: New York, NY, USA, 1999. [Google Scholar]
- Sharkovsky, A.N.; Maistrenko, Y.L.; Romanenko, E.Y. Difference Equations and Their Applications; Springer: Dordrecht, The Netherlands, 1993. [Google Scholar]
- Diekmann, O.; Verduyn Lunel, S.M.; Gils, S.A.; Walther, H.-O. Delay Equations, Functional, Complex and Nonlinear Analysis; Springer: New York, NY, USA, 1995. [Google Scholar]
- Kolmonovskii, V.; Myshkis, A. Introduction to the Theory and Applications of Functional Differential Equations; Kluwer Academic Publishers: Drodrcht, The Netherlands, 1999. [Google Scholar]
- Kelley, W.G.; Peterson, A.C. Difference Equations; An Introduction with Applications, 2nd ed.; Academic Press: New York, NY, USA, 2000. [Google Scholar]
- Allman, E.S.; Rhodes, J.A. Mathematical Models in Biology: An Introduction; Cambridge University Press: New York, NY, USA, 2003. [Google Scholar]
- Beverton, R.J.H.; Holt, S.J. On the Dynamics of Exploited Fish Populations; Springer: Dordrecht, The Netherlands, 1993; Volume 11. [Google Scholar]
- Cooke, K.L.; Calef, D.F.; Level, E.V. Stability or chaos in discrete epidemic models. In Nonlinear Systems and Applications; Academic Press: New York, NY, USA, 1977. [Google Scholar]
- Cull, P.; Flahive, M.; Robson, R. Difference Equations, From Rabbits to Chaos; Undergraduate Texts in Mathematics; Springer: New York, NY, USA, 2005. [Google Scholar]
- Din, Q. A novel chaos control strategy for discrete-time Brusselator models. J. Math. Chem. 2018, 56, 3045–3075. [Google Scholar] [CrossRef]
- Din, Q. Bifurcation analysis and chaos control in discrete-time glycolysis models. J. Math. Chem. 2018, 56, 904–931. [Google Scholar] [CrossRef]
- Din, Q.; Elsayed, E.M. Stability analysis of a discrete ecological model. Comput. Ecol. Softw. 2014, 4, 89–103. [Google Scholar]
- Elsayed, E.M. New method to obtain periodic solutions of period two and three of a rational difference equation. Nonlinear Dyn. 2015, 79, 241–250. [Google Scholar] [CrossRef]
- Moaaz, O. Comment on New method to obtain periodic solutions of period two and three of a rational difference equation [Nonlinear Dyn 79: 241–250]. Nonlinear Dyn. 2017, 88, 1043–1049. [Google Scholar] [CrossRef]
- Kulenovic, M.R.S.; Ladas, G. Dynamics of Second Order Rational Difference Equations with Open Problems and Conjectures; Chapman & Hall/CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Kuruklis, S.; Ladas, G. Oscillation and global attractivity in a discrete delay logistic model. Quart. Appl. Math. 1992, 50, 227–233. [Google Scholar] [CrossRef] [Green Version]
- Pielou, E.C. An Introduction to Mathematical Ecology; John Wiley & Sons: New York, NY, USA, 1965. [Google Scholar]
- May, R.M. Nonlinear problems in ecology and resource management. Chaotic Behav. Determ. Syst. 1983, 389–439. [Google Scholar]
- Kuang, Y.K.; Cushing, J.M. Global stability in a nonlinear difference-delay equation model of flour beetle population growth. J. Differ. Equ. Appl. 1996, 2, 31–37. [Google Scholar] [CrossRef]
- Stevo, S. The recursive sequence un+1 = g(un,un−1)/(A + un). Appl. Math. Lett. 2002, 15, 305–308. [Google Scholar] [CrossRef] [Green Version]
- Karakostas, G.L.; Stevic, S. On the recursive sequence un+1 = α + un−k/f(un,un−1,⋯,un−k+1). Demonstr. Math. 2005, 38, 595. [Google Scholar]
- Sun, S.; Xi, H. Global behavior of the nonlinear difference equation un+1 = f(un−s,un−t). J. Math. Anal. Appl. 2005, 311, 760–765. [Google Scholar] [CrossRef] [Green Version]
- Moaaz, O. Dynamics of difference equation un+1 = f(un−l,un−k). Adv. Differ. Equ. 2018, 2018, 447. [Google Scholar] [CrossRef] [Green Version]
- Elsayed, E.M.; Alofi, B.S. Dynamics and solutions structures of nonlinear system of difference equations. Math. Method. Appl. Sci. 2022, 2022, 1–18. [Google Scholar] [CrossRef]
- Elsayed, E.M.; Aloufi, B.S.; Moaaz, O. The behavior and structures of solution of fifth-order rational recursive sequence. Symmetry 2022, 14, 641. [Google Scholar] [CrossRef]
- Elsayed, E.M.; Alofi, B.S. The periodic nature and expression on solutions of some rational systems of difference equations. Alex. Eng. J. 2023, 74, 269–283. [Google Scholar] [CrossRef]
- Al-Basyouni, K.S.; Elsayed, E.M. On some solvable systems of some rational difference equations of third order. Mathematics 2023, 11, 1047. [Google Scholar] [CrossRef]
- Kara, M.; Yazlik, Y. On the solutions of three-dimensional system of difference equations via recursive relations of order two and applications. J. Appl. Anal. Comput. 2022, 12, 736–753. [Google Scholar] [CrossRef] [PubMed]
- Al-Khedhairi, A.; Elsadany, A.A.; Elsonbaty, A. On the dynamics of a discrete fractional-order cournot–bertrand competition duopoly game. Math. Probl. Eng. 2022, 2022, 8249215. [Google Scholar] [CrossRef]
- Khaliq, A.; Mustafa, I.; Ibrahim, T.F.; Osman, W.M.; Al-Sinan, B.R.; Dawood, A.A.; Juma, M.Y. Stability and bifurcation analysis of fifth-order nonlinear fractional difference equation. Fractal Fract. 2023, 7, 113. [Google Scholar] [CrossRef]
- Amleh, A.M.; Georgiou, D.A.; Grove, E.A.; Ladas, G. On the recursive sequence un+1 = α+un−1/un. J. Math. Anal. Appl. 1999, 233, 790–798. [Google Scholar] [CrossRef] [Green Version]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moaaz, O.; Altuwaijri, A.A. The Dynamics of a General Model of the Nonlinear Difference Equation and Its Applications. Axioms 2023, 12, 598. https://doi.org/10.3390/axioms12060598
Moaaz O, Altuwaijri AA. The Dynamics of a General Model of the Nonlinear Difference Equation and Its Applications. Axioms. 2023; 12(6):598. https://doi.org/10.3390/axioms12060598
Chicago/Turabian StyleMoaaz, Osama, and Aseel A. Altuwaijri. 2023. "The Dynamics of a General Model of the Nonlinear Difference Equation and Its Applications" Axioms 12, no. 6: 598. https://doi.org/10.3390/axioms12060598