


An Analytic Solution for the Dynamic Behavior of a Cantilever Beam with a Time-Dependent Spring-like Actuator

Abstract
:1. Introduction
- (1)
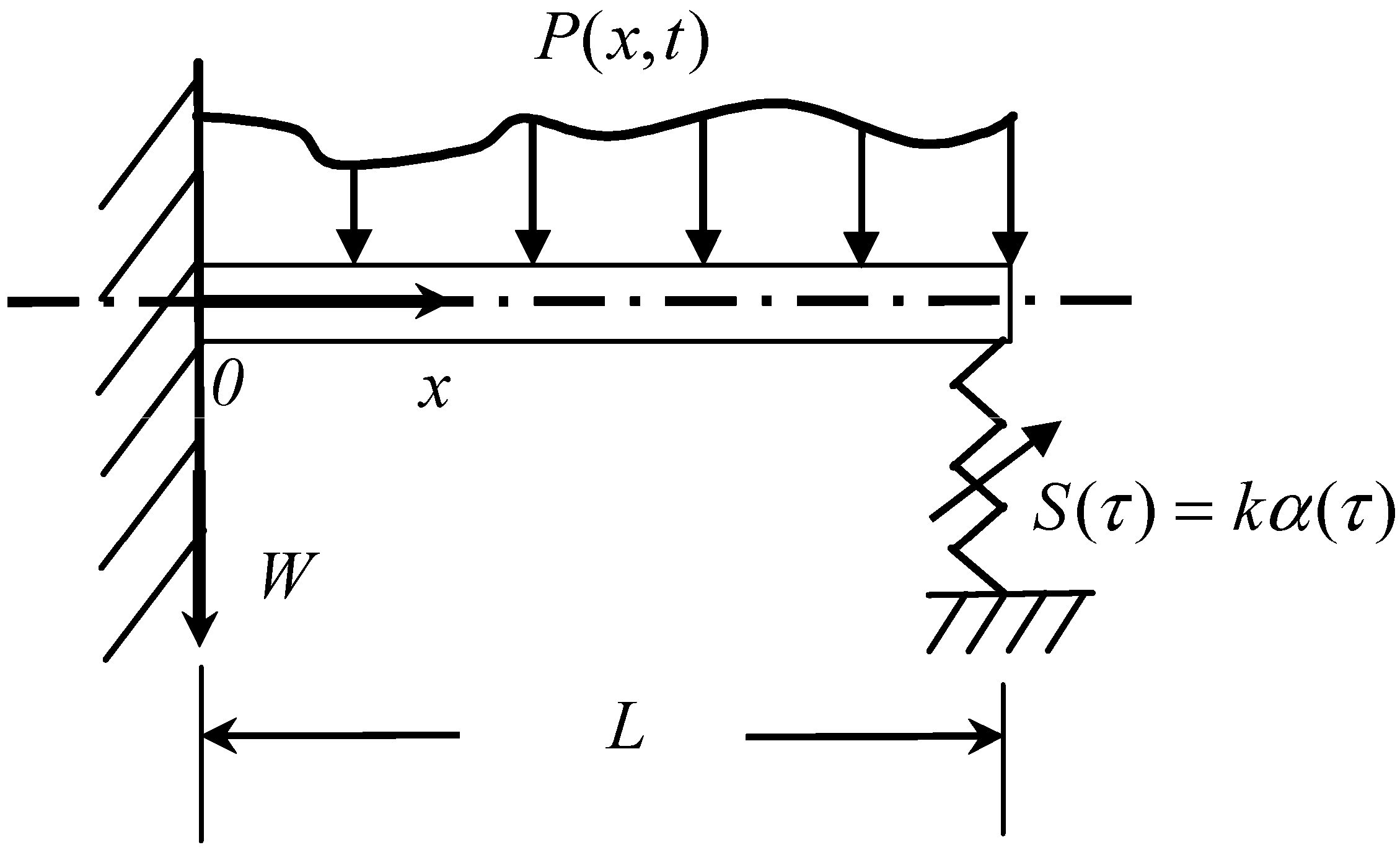
- The novelty of this study comes from the fact this is the first investigation of the dynamic behavior of a cantilever beam with a time-dependent spring support at the free end.
- (2)
- The proposed method, combining the shifting function method with the expansion theorem method, can efficiently find the analytic solution to the dynamic problem of a time-dependent spring-supported cantilever beam.
- (3)
- The influence of time-dependent spring coefficients on the beam system has been obtained and discussed.
2. Mathematical Modeling
3. The Solution Methodology
3.1. The Shifting Function Method
3.2. The Expansion Theorem Method
3.3. The Complete Solution and the Extreme Case Study
- (A)
- When considering a constant spring coefficient, i.e., , Equation (38) becomes
- (B)
- If the spring stiffness is equal to zero, i.e., the cantilever beam is only subjected to external loads, then Equation (53) becomes
4. Harmonic Excitation and Harmonic Type of a Time-Dependent Spring Support
- (1)
- When the time is an odd multiple of , there is
- (2)
- When the time is an even multiple of , there is
5. Numerical Results and Discussions
6. Conclusions
- (1)
- The proposed approach, combining the shifting function method and the expansion theorem method, can obtain an analytical solution to the dynamic behavior of a cantilever beam with a time-dependent spring-like actuator.
- (2)
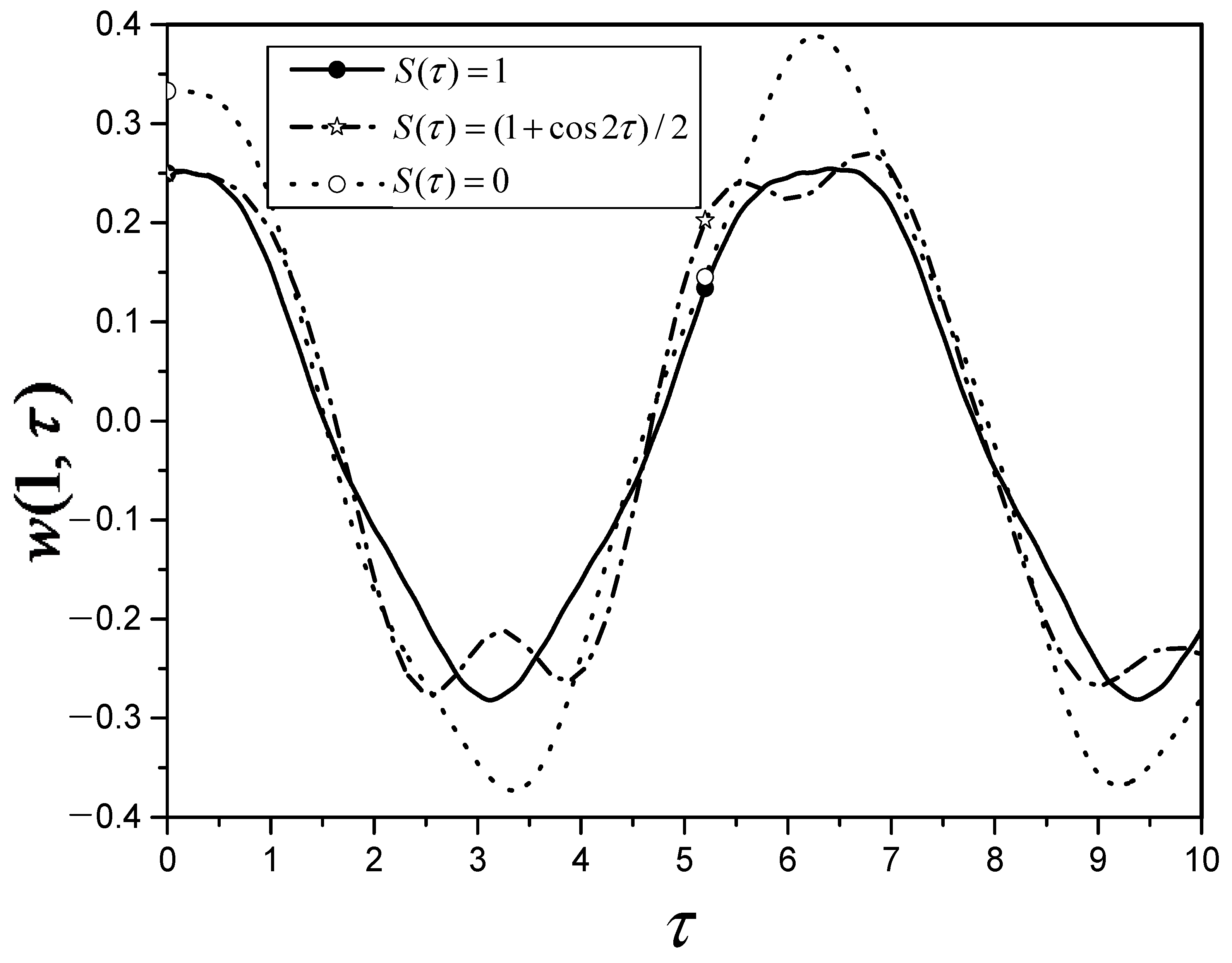
- The deflection of the cantilever beam with a time-dependent spring support is between the two extreme cases of a pure cantilever beam and a cantilever beam with a constant spring coefficient.
- (3)
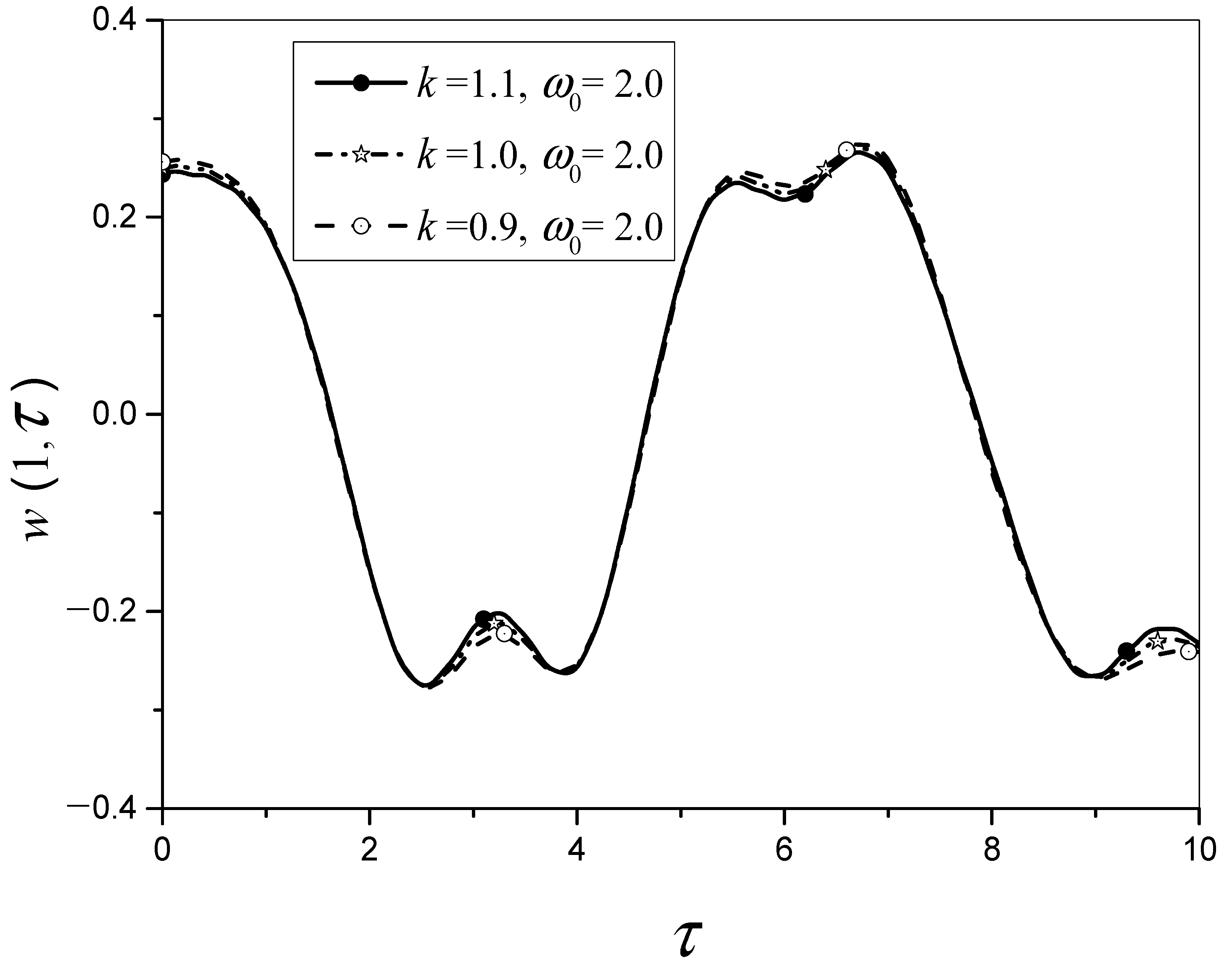
- In the sensitivity analysis, the error in the spring frequency has a greater effect on the variation in the cantilever deflection than that in the spring magnitude.
- (4)
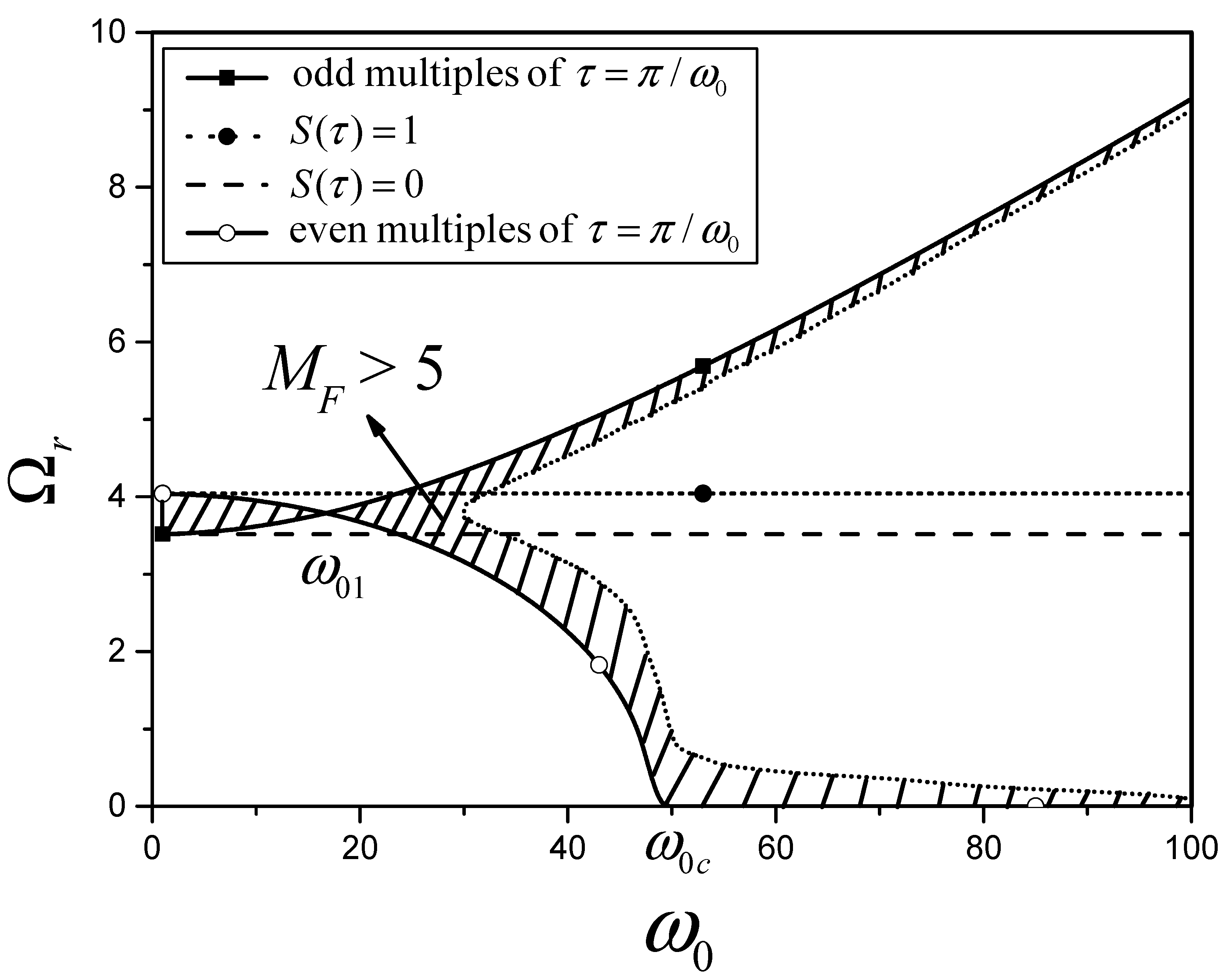
- When the magnitude or the frequency of the spring stiffness is greater than a critical value, the divergence instability occurs in the first mode at even multiples of .
- (5)
- The important new finding is that the resonance frequency depends significantly on the magnitude and the frequency of the spring-like actuator in the first two modes. The magnitude and/or the frequency of the time-dependent spring stiffness can be adjusted to distribute the first two modes to avoid causing unsafe vibrations or even resonances of the beam system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Cross-sectional area () | |
| Young’s modulus () | |
| Auxiliary function | |
| Shifting function | |
| Auxiliary function | |
| Area moment of inertia () | |
| A constant spring stiffness magnitude | |
| Time-dependent spring stiffness () | |
| Length of beam () | |
| Magnification factor | |
| Dimensionless forcing term | |
| Time-dependent generalized coordinate | |
| Amplitude of | |
| Time-dependent spring function | |
| t | Time variable () |
| Phase angle of | |
| Transformed function | |
| Dimensionless flexural displacement of beam | |
| Dimensionless initial displacement and initial velocity | |
| Flexural displacement of beam | |
| Initial displacement and initial velocity | |
| Longitudinal coordinate of the beam () |
Greek Symbols
| A unit dimensionless time-dependent spring stiffness function | |
| Auxiliary function | |
| Delta function used in Equation (58) | |
| Auxiliary function | |
| Kronecker delta | |
| Eigenfunction | |
| Norm of eigenfuction | |
| Auxiliary integration variable | |
| , , | Auxiliary functions |
| , | Characteristic values |
| Dimensionless time variable | |
| Frequency of time-dependent spring stiffness | |
| Critical spring stiffness frequency | |
| Frequency in forcing term | |
| Dimensionless coordinate | |
| Auxiliary function |
References
- Jia, X.L.; Ke, L.L.; Feng, C.B.; Yang, J.; Kitipornchai, S. Size effect on the free vibration of geometrically nonlinear functionally graded micro-beams under electrical actuation and temperature change. Compos. Struct. 2015, 133, 1137–1148. [Google Scholar] [CrossRef]
- Zhang, B.; Sui, Y.; Bu, Q.; He, X. Remaining useful life estimation for micro switches of railway vehicles. Control Eng. Pract. 2019, 84, 82–91. [Google Scholar] [CrossRef]
- Scornec, J.L.; Guiffarda, B.; Sevenoa, R.; Cam, V.L. Frequency tunable, flexible and low cost piezoelectric micro-generator for energy harvesting. Sens. Actuators A Phys. 2020, 312, 112148. [Google Scholar] [CrossRef]
- Wang, T.; Zhu, Z.-W. A new type of piezoelectric self-excited vibration energy harvester for micro-actuator’s energy storage. J. Energy Storage 2022, 46, 103519. [Google Scholar] [CrossRef]
- Wang, H.; Yamada, S.; Tanaka, S. Moving coil type electromagnetic microactuator using metal/silicon driving springs and parylene connecting beams for pure in-plane large motion in three axes. Sens. Actuators A Phys. 2022, 342, 113606. [Google Scholar] [CrossRef]
- Xie, Y.; Lei, J.; Guo, S.; Han, S.; Ruan, J.; He, Y. Size-dependent vibration of multi-scale sandwich micro-beams: An experimental study and theoretical analysis. Thin Walled Struct. 2022, 175, 109115. [Google Scholar] [CrossRef]
- Onoda, J.; Watanabe, N. Vibration suppression by variable-stiffness members. AIAA J. 1991, 29, 977–983. [Google Scholar] [CrossRef]
- Giirdal, Z.; Olmedo, R. In-plane response of laminates with spatially varying fiber orientations: Variable stiffness concept. AIAA J. 1993, 31, 751–758. [Google Scholar] [CrossRef]
- Kuder, I.K.; Arrieta, A.F.; Raither, W.E.; Ermanni, P. Variable stiffness material and structural concepts for morphing applications. Prog. Aerosp. Sci. 2013, 63, 33–55. [Google Scholar] [CrossRef]
- Sun, S.; Yang, J.; Li, W.; Deng, H.; Du, H.; Alici, G. Development of a novel variable stiffness and damping magnetorheological fluid damper. Smart Mater. Struct. 2015, 24, 085021. [Google Scholar] [CrossRef]
- Kumar, D.; Sarangi, S. Variable stiffness modeling of smart cantilever beam under the electrical loading condition. Procedia Comput. Sci. 2018, 133, 697–702. [Google Scholar] [CrossRef]
- Zhao, Y.; Meng, G. A bio-inspired semi-active vibration isolator with variable-stiffness dielectric elastomer: Design and modeling. J. Sound Vib. 2020, 485, 115592. [Google Scholar] [CrossRef]
- Baniasadi, M.; Foyouzat, A.; Baghani, M. Multiple shape memory effect for smart helical springs with variable stiffness over time and temperature. Int. J. Mech. Sci. 2020, 182, 105742. [Google Scholar] [CrossRef]
- Balachandran, B.; Magrab, E.B. Vibrations; Cambridge University Press: New York, NY, USA, 2018; Chapter 9; pp. 547–565. [Google Scholar]
- Meirovitch, L. Analytical Methods in Vibrations; The Macmillan Company: London, UK, 1967; Chapter 7; pp. 300–308. [Google Scholar]
- Nothmann, G.A. Vibration of a cantilever beam with prescribed end motion. ASME J. Appl. Mech. 1948, 15, 327–334. [Google Scholar] [CrossRef]
- Lee, S.Y.; Yan, Q.Z. An analytical solution for out-of-plane deflection of a curved Timoshenko beam with strong nonlinear boundary conditions. Acta Mech. 2015, 226, 3679–3694. [Google Scholar] [CrossRef]
- Yen, T.C.; Kao, S. Vibration of beam-mass systems with time-dependent boundary conditions. ASME J. Appl. Mech. 1959, 26, 353–356. [Google Scholar] [CrossRef]
- Mindlin, R.D.; Goodman, L.E. Beam vibrations with time-dependent boundary conditions. ASME J. Appl. Mech. 1950, 17, 377–380. [Google Scholar] [CrossRef]
- Edstrom, C.R. The vibrating beam with nonhomogeneous conditions. ASME J. Appl. Mech. 1981, 48, 669–670. [Google Scholar] [CrossRef]
- Grant, D.A. Beam vibrations with time-dependent boundary conditions. J. Sound Vib. 1983, 89, 519–522. [Google Scholar] [CrossRef]
- Herrmann, G. Forced motions of Timoshenko beam theory. ASME J. Appl. Mech. 1955, 22, 53–56. [Google Scholar] [CrossRef]
- Berry, J.G. and Nagdhi, On the vibration of elastic bodies having time-dependent boundary conditions. Q. Appl. Math. 1956, 14, 43–50. [Google Scholar] [CrossRef]
- Epstein, H.I. Vibrations with time-dependent internal conditions. J. Sound Vib. 1975, 39, 297–303. [Google Scholar] [CrossRef]
- Aravamudan, K.S.; Murthy, P.N. Nonlinear vibration of beams with time-dependent boundary conditions. Int. J. Nonlinear Mech. 1973, 8, 195–212. [Google Scholar] [CrossRef]
- Lee, S.Y.; Lin, S.M. Dynamic analysis of nonuniform beams with time-dependent elastic boundary conditions. ASME J. Appl. Mech. 1996, 63, 474–478. [Google Scholar] [CrossRef]
- Lee, S.Y.; Lin, S.M. Nonuniform Timoshenko beams with time-dependent elastic boundary conditions. J. Sound Vib. 1998, 217, 223–238. [Google Scholar] [CrossRef]
- Lin, S.M.; Lee, S.Y. The forced vibration and boundary control of pretwisted Timoshenko beams with general time-dependent elastic boundary conditions. J. Sound Vib. 2002, 254, 69–90. [Google Scholar] [CrossRef]
- Lin, S.M. Pretwisted nonuniform beams with time-dependent elastic boundary conditions. Am. Inst. Aeronaut. Astronaut. J. 1998, 36, 1516–1523. [Google Scholar] [CrossRef]
- Lee, S.Y.; Wang, W.R.; Chen, T.Y. A general approach on the mechanical analysis of nonuniform beams with nonhomogeneous elastic boundary conditions. ASME J. Appl. Mech. 1998, 120, 164–169. [Google Scholar] [CrossRef]
- Sajjadi, M.; Pishkenari, H.N.; Vossoughi, G. On the nonlinear dynamics of trolling-mode AFM: Analytical solution using multiple time scales method. J. Sound Vib. 2018, 423, 263–286. [Google Scholar] [CrossRef]
- Horssen, W.T.V.; Wang, Y.; Cao, G. On solving wave equations on fixed bounded intervals involving Robin boundary conditions with time-dependent coefficients. J. Sound Vib. 2018, 424, 263–271. [Google Scholar] [CrossRef]
- Ahmad, M.; Ansari, R.; Darvizeh, M. Free and forced vibrations of atomic force microscope piezoelectric cantilevers considering tip-sample nonlinear interactions. Thin Walled Struct. 2019, 145, 106382. [Google Scholar] [CrossRef]
- Wang, J.; Horssen, W.T.V.; Wang, J.-M. On resonances in transversally vibrating strings induced by an external force and a time-dependent coefficient in a Robin boundary condition. J. Sound Vib. 2021, 512, 116356. [Google Scholar] [CrossRef]
- Wang, X.; Meng, L.; Yao, Y.; Li, H. A vibration-driven locomotion robot excited by time-varying stiffness. Int. J. Mech. Sci. 2023, 243, 108009. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 Term | 2 Terms | 3 Terms | 4 Terms | 5 Terms | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| A | B | A | B | A | B | A | B | A | B | |
| 0 | 0.2393 | 0.2402 | 0.2455 | 0.2485 | 0.2463 | 0.2495 | 0.2465 | 0.2498 | 0.2466 | 0.2499 |
| 1 | 0.1507 | 0.148 | 0.1572 | 0.1525 | 0.1577 | 0.1531 | 0.1578 | 0.1532 | 0.1578 | 0.1533 |
| 2 | −0.1032 | −0.1030 | −0.1086 | −0.1064 | −0.1089 | −0.1069 | −0.1089 | −0.1070 | −0.1089 | −0.1070 |
| 3 | −0.2716 | −0.2674 | −0.2780 | −0.2756 | −0.2788 | −0.2767 | −0.2790 | −0.2770 | −0.2791 | −0.2771 |
| 4 | −0.1508 | −0.1531 | −0.1590 | −0.1586 | −0.1596 | −0.1593 | −0.1598 | −0.1594 | −0.1599 | −0.1595 |
| 5 | 0.0689 | 0.0692 | 0.0728 | 0.0715 | 0.0729 | 0.0718 | 0.073 | 0.0719 | 0.073 | 0.0719 |
| 6 | 0.236 | 0.2358 | 0.2426 | 0.2438 | 0.2433 | 0.2448 | 0.2437 | 0.2451 | 0.2438 | 0.2452 |
| 7 | 0.2127 | 0.2086 | 0.2201 | 0.2148 | 0.2209 | 0.2156 | 0.2211 | 0.2158 | 0.2212 | 0.2159 |
| 8 | −0.0491 | −0.0469 | −0.0513 | −0.0481 | −0.0512 | −0.0483 | −0.0513 | −0.0483 | −0.0513 | −0.0483 |
| 9 | −0.2387 | −0.2367 | −0.2455 | −0.2443 | −0.2463 | −0.2453 | −0.2465 | −0.2455 | −0.2466 | −0.2456 |
| 10 | −0.1997 | −0.2005 | −0.2071 | −0.2075 | −0.2080 | −0.2083 | −0.2082 | −0.2086 | −0.2083 | −0.2087 |
| 0 | 2.53% | 0.325% | 0.0811% | 0.0376% |
| 1 | 4.13% | 0.317% | 0.0634% | 0% |
| 2 | 4.97% | 0.275% | 0% | 0% |
| 3 | 2.30% | 0.287% | 0.0717% | 0.0358% |
| 4 | 5.16% | 0.376% | 0.125% | 0.0625% |
| 5 | 5.36% | 0.137% | 0.137% | 0% |
| 6 | 2.72% | 0.288% | 0.164% | 0.0410% |
| 7 | 3.36% | 0.362% | 0.0905% | 0.0452% |
| 8 | 4.29% | 0.195% | 0.195% | 0% |
| 9 | 2.77% | 0.325% | 0.0811% | 0.0406% |
| 10 | 3.57% | 0.437% | 0.096% | 0.0480% |
| Parameter | Sensitivity |
|---|---|
| , | a |
| 0.0463~13.5% | |
| 0.0566~13.1% | |
| , | b |
| 0.0~58.0% | |
| 0.0~63.9% |
| Mode I | Mode II | |||
| 0 | 3.516 | 4.038 | 22.034 | 22.126 |
| (comparison) | 3.516 (ES a) | 4.040 (SVM b) | 22.034 (ES a) | 22.126 (SVM b) |
| 1 | 3.517 | 4.037 | 22.034 | 22.126 |
| 2 | 3.520 | 4.035 | 22.034 | 22.127 |
| 5 | 3.541 | 4.016 | 22.031 | 22.130 |
| 10 | 3.616 | 3.950 | 22.020 | 22.141 |
| 15 | 3.737 | 3.838 | 22.001 | 22.160 |
| 20 | 3.900 | 3.674 | 21.975 | 22.186 |
| 25 | 4.100 | 3.453 | 21.942 | 22.219 |
| 30 | 4.330 | 3.161 | 21.901 | 22.260 |
| 35 | 4.591 | 2.777 | 21.853 | 22.308 |
| 40 | 4.873 | 2.254 | 21.797 | 22.363 |
| 45 | 5.174 | 1.448 | 21.734 | 22.426 |
| 47 | 5.299 | 0.898 | 21.706 | 22.453 |
| 48 | 5.363 | 0.374 | 21.692 | 22.467 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, J.-R.; Tu, T.-W.; Huang, C.-J. An Analytic Solution for the Dynamic Behavior of a Cantilever Beam with a Time-Dependent Spring-like Actuator. Axioms 2023, 12, 500. https://doi.org/10.3390/axioms12050500
Chang J-R, Tu T-W, Huang C-J. An Analytic Solution for the Dynamic Behavior of a Cantilever Beam with a Time-Dependent Spring-like Actuator. Axioms. 2023; 12(5):500. https://doi.org/10.3390/axioms12050500
Chicago/Turabian StyleChang, Jer-Rong, Te-Wen Tu, and Chun-Jung Huang. 2023. "An Analytic Solution for the Dynamic Behavior of a Cantilever Beam with a Time-Dependent Spring-like Actuator" Axioms 12, no. 5: 500. https://doi.org/10.3390/axioms12050500