1. Introduction
Currently, several control-engineering academics have been interested in fractional-order systems. It is demonstrated that fractional-order equations may more accurately capture the exact model of the majority of dynamic systems [
1,
2,
3,
4,
5]. On the other hand, it has been recognized during the past several years that certain living creatures have a propensity for swarming activity. These multi-agent systems include, for instance, herds of animals, schools of fish, flocks of birds, and bacterial colonies. The configuration distinction between multi-agent systems and isolated dynamic systems makes their stability unique [
6,
7,
8].
In addition, when the model of agents is in fractional-order form, researchers appreciate the relevance of studying behavior analysis and control of FOMASs and the distributed coordination of networked fractional-order systems, which have a range of technical applications [
9,
10,
11]. Refs. [
12,
13] as pioneering works initially began researching the distributed control issue in FOMASs. However, for now, it is among the most popular subjects in the multi-agent systems space.
In [
14], using fractional-order iterative learning control, the consensus problem in leader–follower multi-agent fractional-order systems with time delays is investigated. The concept of inverse-optimal consensus is addressed in [
15]. Single-integral dynamics are taken into consideration in this study for both continuous and discrete-time FOMASs, and the ultimate consensus solution is derived. Furthermore, by employing the optimum state-feedback gain matrices, consensus is firmly established [
15]. Some necessary and sufficient conditions to reach consensus are derived in the context of a particular example of interconnected positive fractional-order multi-agent systems connected through a directed graph [
16]. In terms of linear-matrix inequalities, sufficient criteria of non-fragile consensus have been attained for fractional-order nonlinear MASs. [
17]. In this reference, state-time delay is also considered for agents and it is also shown that the presented methodology can be used to some other kinds of FOMASs [
17]. Finite-time consensus for nonlinear FOMASs is studied in [
18], where the order of agents is incommensurate and graph topology can also be switched.
Event-triggered strategies were used in [
19] in order to achieve exponential leader–follower consensus in FOMASs as defined by the Mittag–Leffler stability formula. In addition, in [
20] a similar strategy based on an event trigger is used to achieve consensus in a FOMAS with intermittent agent communication in a finite time.
The majority of the necessary and sufficient requirements for reaching consensus described in the literature relies on certain presumptions. For example, the assumption in [
21] that any agent’s motion is towards the convex hull produced by its neighbors is rather restrictive. This premise is violated by many swarm systems that may attain consensus. The authors in [
22,
23] even supposed that the dynamics of the agents should be stable. Ref. [
24] recently proposed necessary and sufficient requirements for achieving consensus even when the dynamic matrix of agents is unstable.
Recently, the concept of a parametric interval has been used to explain the parametric variations in fractional-order uncertain dynamical systems [
25,
26]. The interval ranges of the eigenvalues were established using a matrix perturbation theory in [
26] and the conservatism was decreased using the Lyapunov inequality in [
25]. The findings in [
25,
26] only offer sufficient circumstances, though. The reliable stability of fractional-order linear-interval systems has already been demonstrated via necessary and sufficient criteria [
27]. However, in their model, they only took into account real matrices with fractional 1 ≤ α < 2.
This study proposes a necessary and sufficient criterion to achieve consensus in FOMAS with interval uncertainties, even if the dynamic matrices of agents have complex coefficients.
The structure of this article is as follows: FOMAS and definitions of asymptotic swarm stability (consensus) are addressed in
Section 2. Swarm robust asymptotic stability and the primary findings of this study are described in
Section 3, and simulation results are utilized to support the suggested technique in
Section 4.
Section 5 then provides a conclusion.
2. FOMAS with Interval Uncertainties
The FOMAS system discussed in this paper consists of the fractional-order dynamic agents with linear-time invariant models that are connected via a directed graph. In the literature, this model is also referred to as a fractional-order linear-time invariant swarm system [
2,
3]. It is important to note that “asymptotic swarm stability” is another term for “consensus,” which is often used in the context of swarm systems.
The dynamics of the N agents in the model of these systems are given by pseudo state space models [
2,
3,
4] with dimension d. In the rest, the state vector of ith agent is shown by
. The communication between agents is modeled via an N order weighted directed graph G in which each agent is a vertex of the graph. In addition, the weight of graph G between the ith and jth agents is represented by
, the value of which is used to assess the intensity and strength of the information transfer between two agents. A graph G is represented by its adjacency matrix
W as follows
which is symmetric if G is not directed; else, it is asymmetric. Now we are ready to express the fractional-order dynamic model of each agent in the FOMAS as follows:
where
,
, and the notation
stand for the Caputo fractional derivative, which is defined as follows [
5,
11]
It is important to note that the FOMAS expressed in Equation (1) is a fractionalized version of the integer-order swarm systems in [
24], which was first introduced as a fractional-order swarm system (FOMAS) in [
2].
It should be noted that there are other definitions for fractional-order derivatives, including Riemann–Liouville and Grünwald–Letnikov. However, the reason why we used Caputo’s definition to express the fractional-order derivative is that it is only by using Caputo’s definition that the initial conditions of the fractional-order system are the same as the initial conditions of its integer-order counterpart. This is why the Caputo’s derivative is more useful in the definition of fractional-order format of real dynamic systems.
In this paper, it is assumed that matrices A and F are interval uncertain parameter-wise. Consequently, matrices A and F are defined in the forms and , respectively, where and are lower and upper bounded, i.e., and , respectively.
The dynamic of each agent is shown by matrix A in the swarm-system model of Equation (1). As a result, if an agent does not have any neighbors, its dynamics will be characterized by . In addition, F represents the interaction dynamics between two neighboring agents, which is intuitively related to attraction/repulsion coupling. If F is Hurwitz, this relationship might be considered attractive.
In order to distinguish the concept of stability among multi-agent systems from the Lyapunov stability of isolated systems, which often refers to cohesiveness, the idea of stability needs to be reinterpreted in terms of the relative movements among agents [
2,
3,
4,
5,
6].
Definition 1. (Asymptotic swarm stability) [11]: Take into consideration that FOMAS consists of N agents andas the agent pseudo states. If the system achieves consensus, that is, fors.t. when,, it is therefore referred to as being full-state consensus or, in other words, asymptotically swarm stable. If the agents’ pseudo state vector is specified as
, then the FOMAS dynamic in Equation (1) can be rewritten as
where
is the graph G’s Laplacian matrix, and
stands for the Kronecker product operator. The characteristics of the Laplacian matrix are covered in Lemma 1 as follows.
Lemma 1. [14]: The Laplacian matrix L of a directed graph with N vertices has exactly a single zero eigenvaluewith the related eigenvectorif G includes a spanning tree. In addition, the remained eigenvaluesare all located in the right half plane. Suppose that J stands for the Jordan canonical form of L and that its eigenvalues are.Hence, J has the following form:
where
may either be 1 or 0. It is evident that matrix T is discovered in a way that
. By assumption
, Equation (2) is transformed into
The structure
is in the form
where each × is a
block that may either be −
F or 0 [
5,
11].
3. Swarm Robust Asymptotic Stability (Robust Consensus)
This section’s primary goal is to provide the necessary and sufficient conditions in order to achieve the consensus in FOMASs with interval uncertainty. To this end, some preliminaries are needed.
Definition 2. Matrixis said to be-Hurwitz if and only ifis met for all of the eigenvalues (λ) of the matrix A.
Theorem 1. [28]: An FO-LTI system represented by pseudo state-space formis asymptotically stable if and only if matrix A is-Hurwitz. This theorem may be used to simply expand the stability conditions given for integer swarm systems in [
21] to the fractional swarm system introduced in Equation (1).
Theorem 2. [24]: Considering the FOMAS described in Equation (1), whenare the eigenvalues of Laplacian matrix L(G). Then, even if A is not Hurwitz, the system achieves consensus if and only if both of the following conditions are satisfied. 1. In the graph topology G, a spanning tree is present.
2. The matrices are all -Hurwitz.
Let us define new interval matrices as follows:
Then, according to Lemma 1 that
, the vertex matrices of
can be defined as
where
and matrices
and
are defined as
Theorem 3. [29]: Suppose that the matrixis a Hermitian interval matrix wheresuch that, and H[
P,
Q]
denote the set of Hermitian interval matrices satisfying, andfor,. Ifdenotes the set of all Hermitian vertex matrices T such thator, thenis obtained at one of thevertex matrices in. Remark 1. In [29], it was proven thatis obtained at a special subset ofwhich consists of onlyvertex matrices (for more information about this special subset, see Section 2 of [29]). Lemma 2. [27,30](Lyapunov Inequality): Letbe a given complex matrix and letdenote a given open region of the complex plane. Matrix A has all its eigenvalues in region D if and only if For there are two matrices
and
such that
where
.
For there is a matrix
such that
where
.
Now we express the following theorem in light of Lemma 2 and Theorems 2 and 3:
Theorem 4. An interval FOMAS system with a non-Hurwitz matrix A in the form of Equation (1) is swarm robust asymptotic stable (achieving consensus) if and only if the graph G includes a spanning tree and for all vertex matrices within the vertex set defined in Equation (6):
Case 1. when, there exists a positive definite Hermitian matrixsuch thatfor all of the individualmatrices in the vertex set; i.e.,where,
Case 2. when, there exist two matricesandsuch thatwhere.
Proof.
(Sufficient): Assume that for all matrices of vertex matrices within the vertex set defined in Equation (6) the conditions of the theorem are satisfied. Now, we will prove that the interval FOMAS is asymptoticly robust stable.
Case 1. when: Based on Lemma 2, since is valid for one of the vertex matrices of , all its eigenvalues are located in-Hurwitz region. For convenience, let us replace. Then,is an interval complex matrix. Now, consider. Then conditionbecomeswhereis the complex conjugate matrix transposed of A′. Given thatis an interval Hermitian matrix, the eigenvalues ofare all real, and therefore we can draw the conclusion that the system is robustly asymptotic stable if the maximum eigenvalue ofis negative. Based on Theorem 3, a maximum eigenvalue ofis obtained at one of its vertex matrices, so eigenvalues of all the matricesare located in the-Hurwitz region, and when in the graph topology G a spanning tree is present, if there exists positive definite Hermitian matricessuch thatholds for all, then the interval FO-LTI system achieves consensus using Theorem 2.
Case 2. whenby replacingand, conditionbecomesand the proof is similar to the previous case.
(Necessary): Assume that the FOMAS system is swarm robust asymptotic stable (achieves consensus) and a spanning tree is included in the graph topology G. Therefore, the system in Equation (1) achieves consensus (or is swarm robust asymptotic stable) if eigenvalues of all the matrices are located in the -Hurwitz region. Based on Lemma 2 for all matrices of vertex matrices within the vertex set defined in Equation (6), its equivalent to existence positive definite Hermitian matrices such that for case 1 when and there exist two matrices and such that in case 2 when . □
We can dampen necessary and sufficient conditions in Theorem 4 to a more conservative condition in which we should only solve one Lyapunov inequality instead of
N + 1 (for
inequalities. It should also be noted that there are other similar techniques that have been used in the study of robust network stability, for example [
31].
The vertex matrices can be defined as follows:
The sufficient condition of robust consensus in the interval FOMAS is expressed in Theorem 5 as follows:
Theorem 5. The interval swarm FOMAS achieves robust consensus if in the graph topology G a spanning tree is included and for allmatrices ofvertex matrices within the vertex set defined in Equation (9):
Case 1. when, there exists a positive definite Hermitian matrixsuch thatwhere
Case 2. when, there exist two matricesandsuch thatwhere.
Proof. The interval matrices of vertex set defined in Equation (9) includes all interval matrices of the vertex set defined in Equation (6). Therefore, if the graph topology G has a spanning tree and for all matrices of vertex matrices within the vertex set defined in Equation (9) the condition of theorem 5 for Case 1 and Case 2 is satisfied, similar to the proof presented in Theorem 3, the eigenvalues of all the matrices located in the -Hurwitz region and the interval FOMAS system are robust and stable asymptotically. □
Remark 2. It is worth mentioning that ifthe dynamic matrices of the agents have complex coefficients, meaning that the elements of the matrices A and F are complex, there is no change in the form of interval or vertex matrices in the format of Equations (5) and (6). Therefore, we can say that the methodology of this paper is also valid for FOMAS in which the dynamic matrices of agents have complex coefficients.
4. Simulation Results
In this section some numerical examples are presented as simulation results in order to show the validity and effectiveness of the proposed theorems.
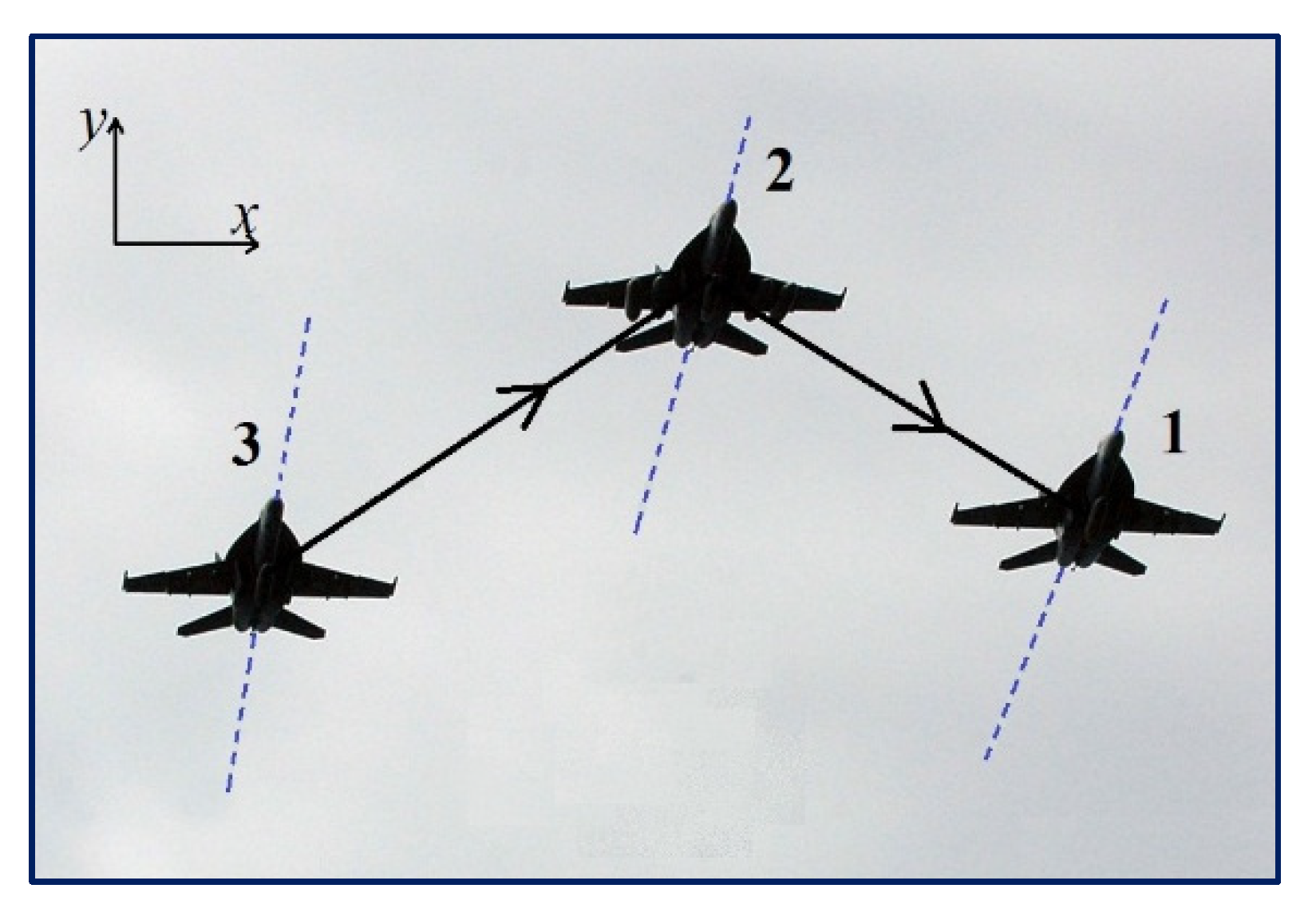
Example 1
For the first example, a triangular formation of three high-speed airplanes when flying in rainy or snowy weather, as in
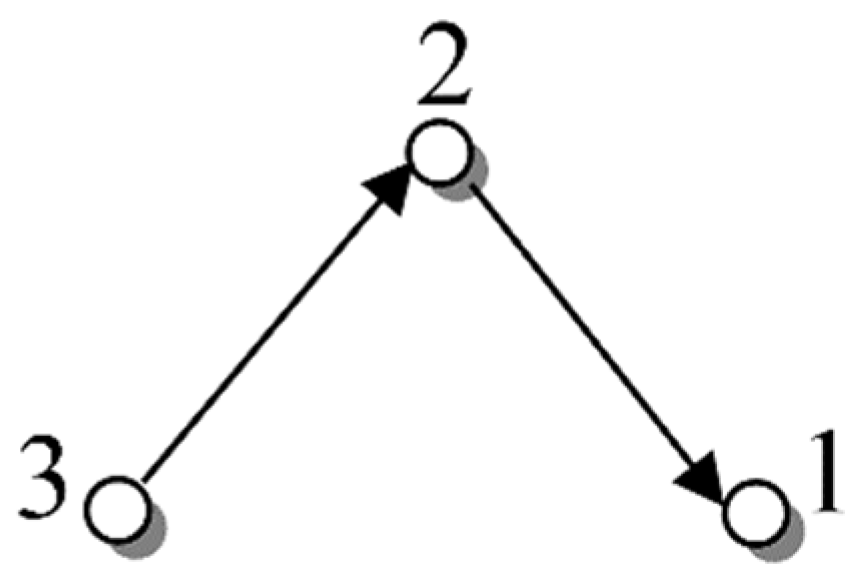
Figure 1, and communicated using graph
, as in
Figure 2, was considered. The aim in this case was to achieve consensus on the orientation of these airplanes in two dimensions. This example was first introduced in [
5] as a fractional-order multi-agent system.
Due to the communications among airplanes, the orientation of each one depends on the differences between its own orientation and that of others. Therefore, the following fractional-order multi-agent model can describe the orientation of each airplane:
Graph
shown in
Figure 1 is concerned with
The graph’s Laplacian matrix has the following eigenvalues:
where
, which makes
and
and
with
The interval matrices of all matrices in the form of Equation (5) are
with
It is easy to check that all eigenvalues of vertex matrices in Equation (6) lay in the stable region. In addition, the existence of and can be checked by the LMI formulation or Lyapunov matrix equation, and one can find that and exists, such that the inequality in Equation (7) holds for all , which establishes the robust asymptotic stability of the fractional-order interval swarm system (10).
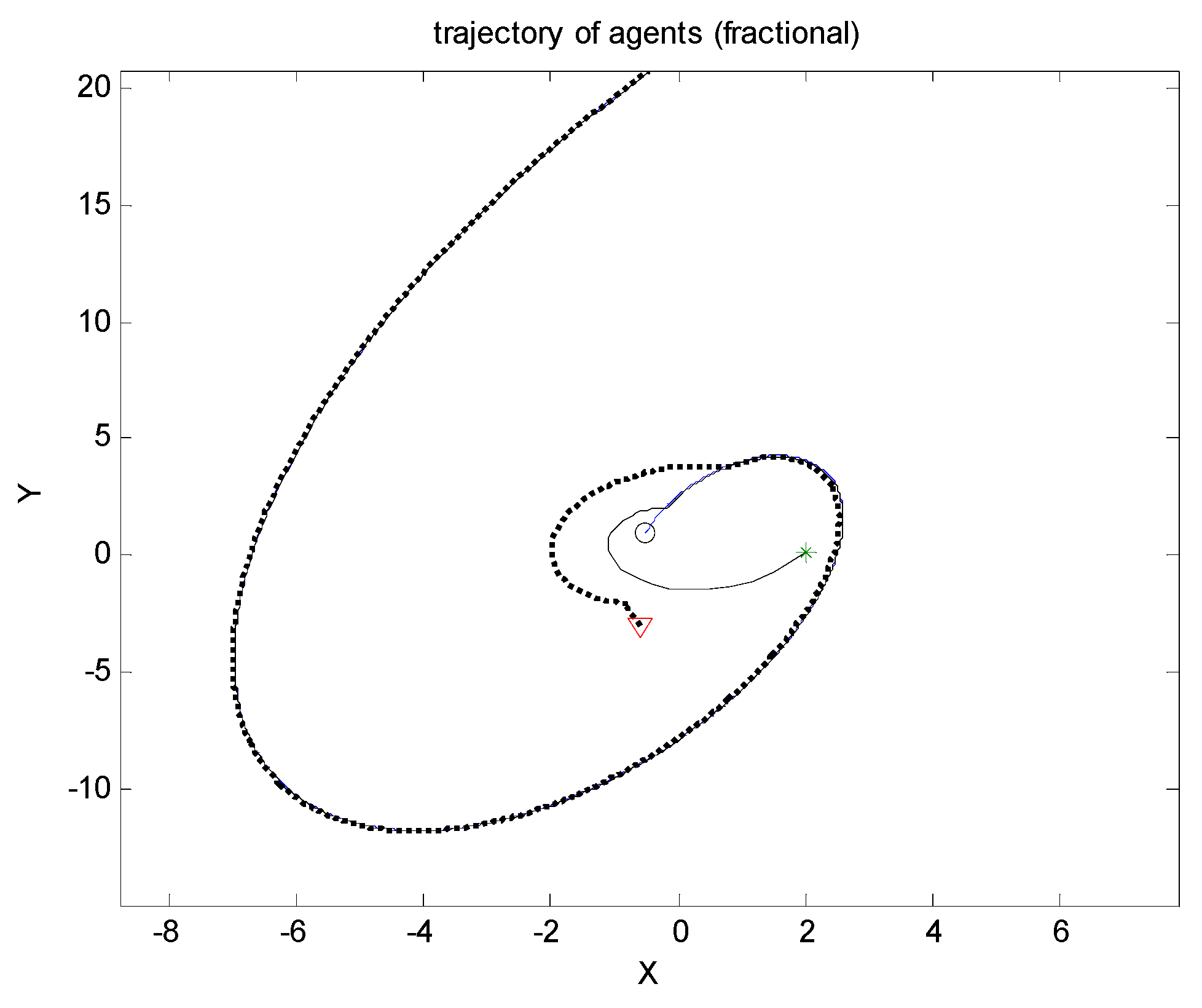
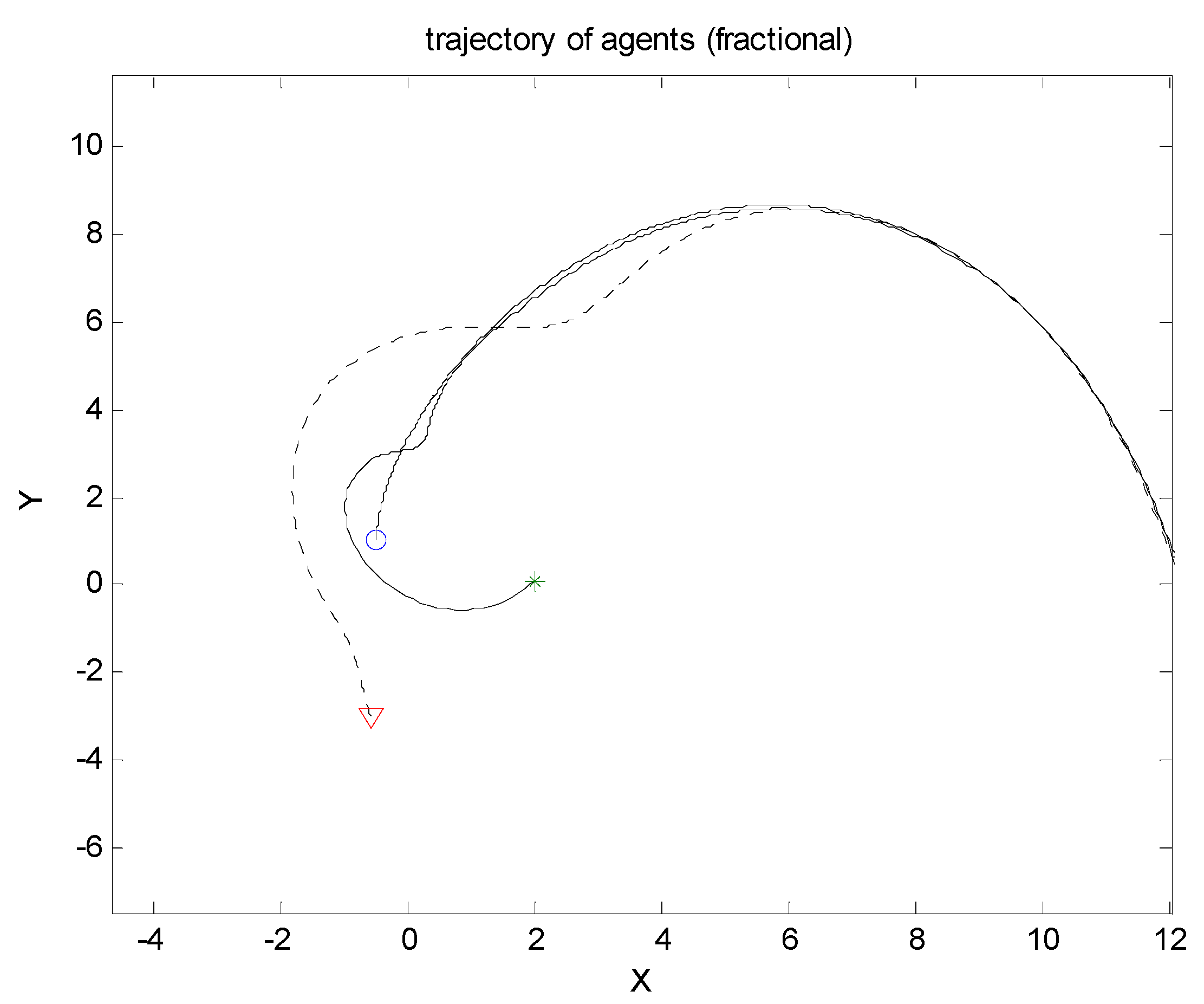
Figure 3 demonstrates the three agent trajectories in the Plane phase. The agents converged, and they achieved consensus.
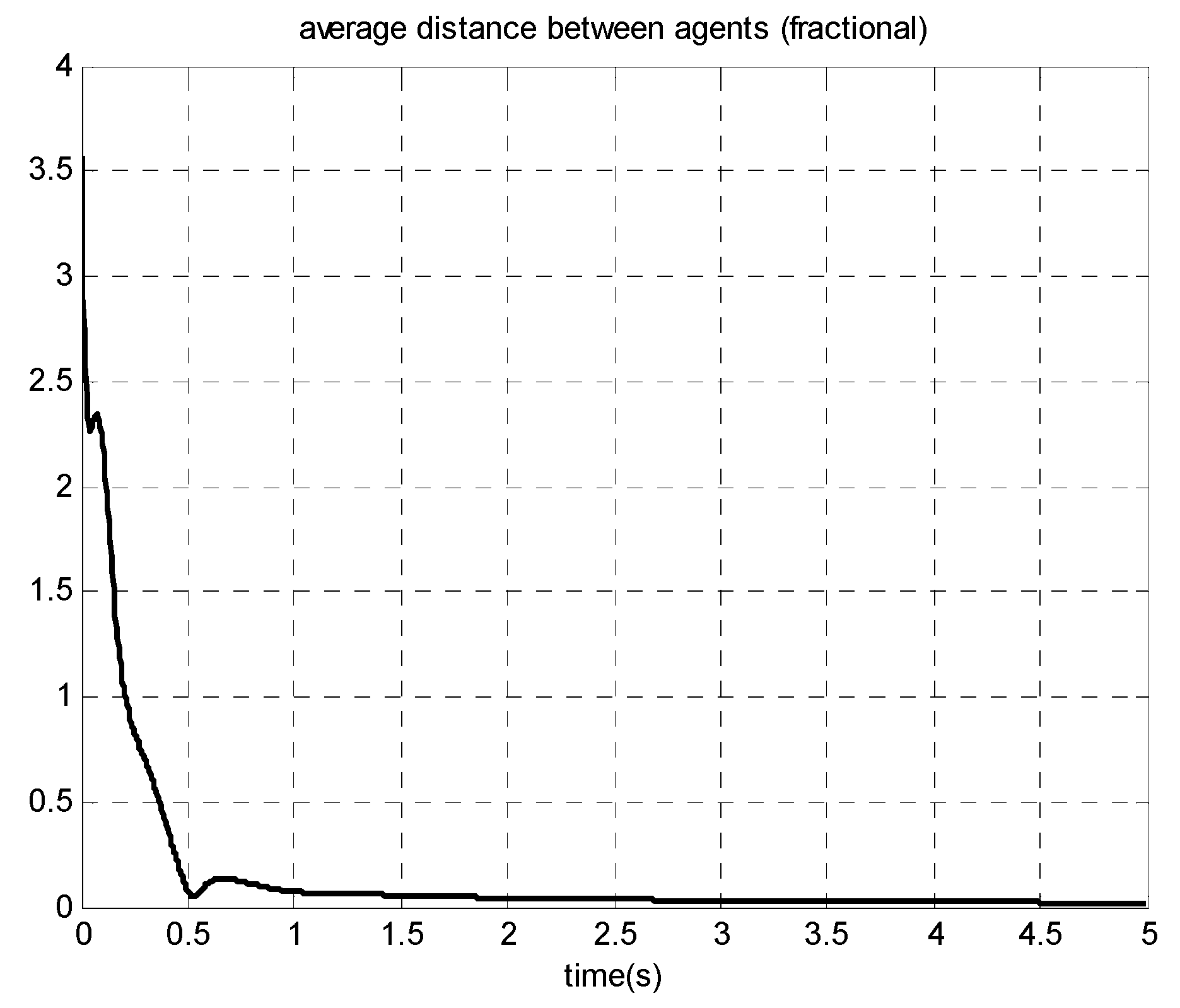
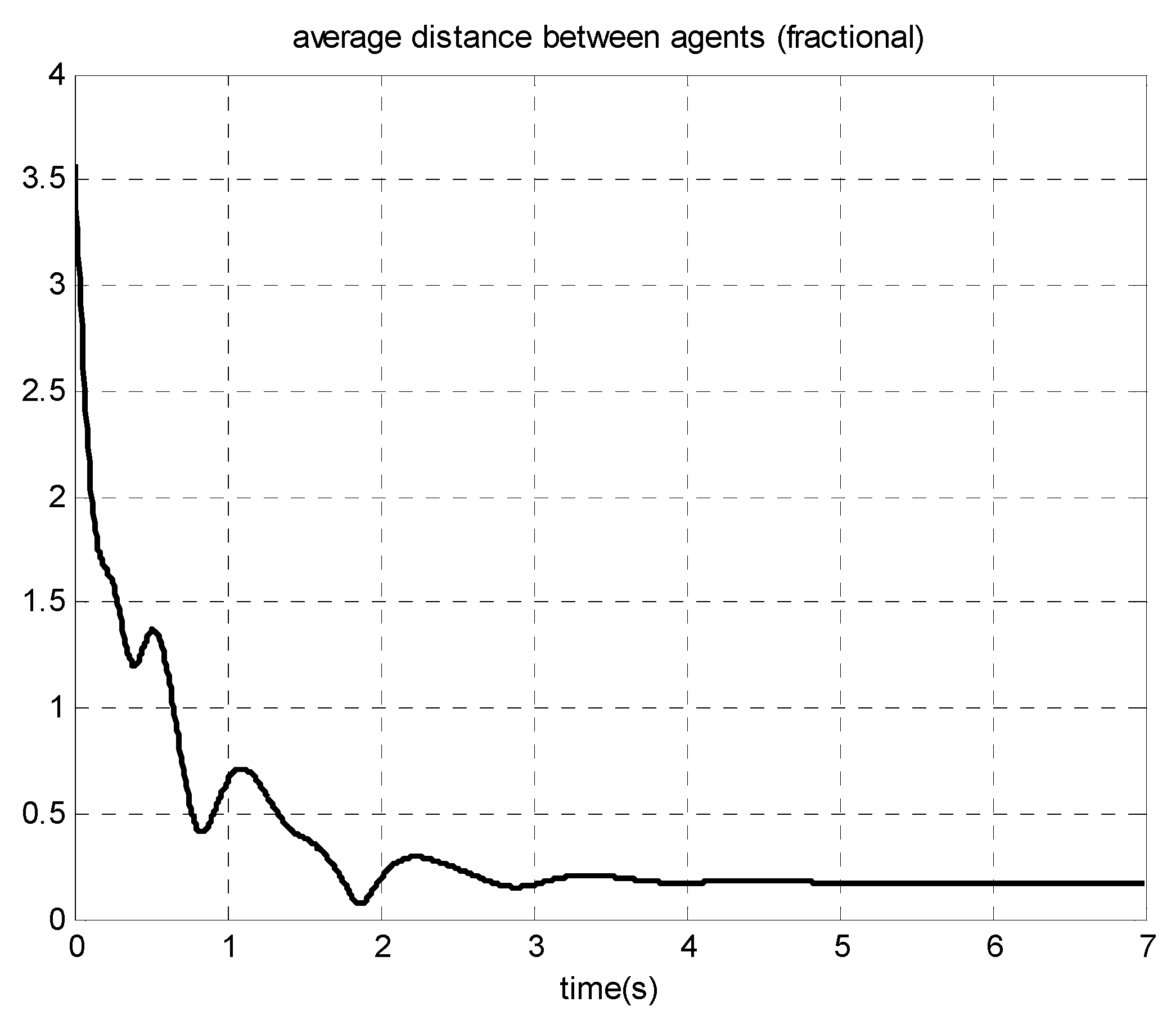
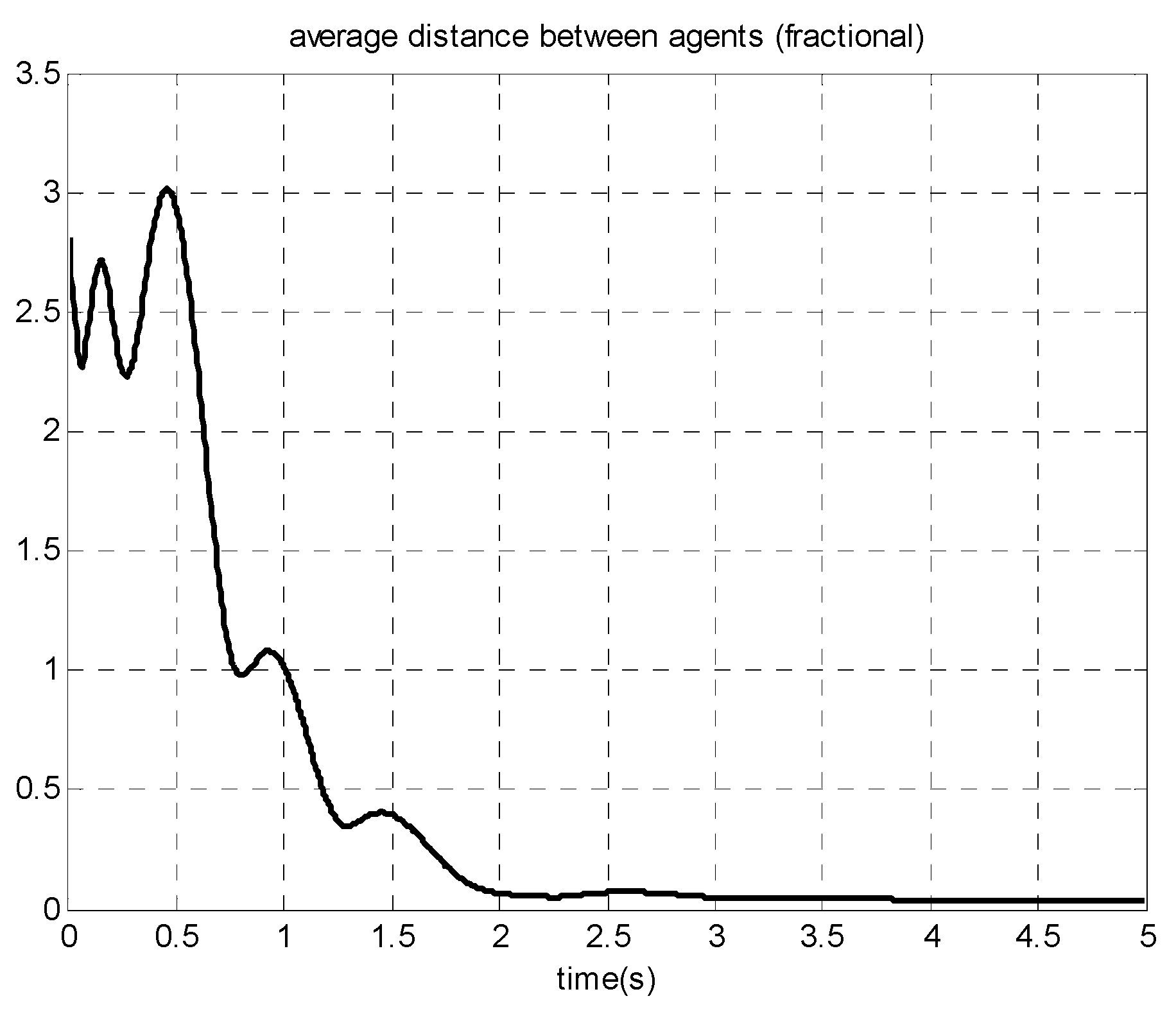
Figure 4 displays the average distance between agents, indicating the relative movements, which is
. It is evident that the relative movements were Lyapunov asymptotically stable, which serves as another demonstration of the agents’ convergence and the robust consensus of the interval FOMAS (10).
Example 2
We then considered system (10) in the previous example where
, which makes
and
and
with
The trajectories of the agents are shown in
Figure 5, and
Figure 6 shows the average distance between agents. The agents converged and system was robust swarm asymptotically stable.
Example 3
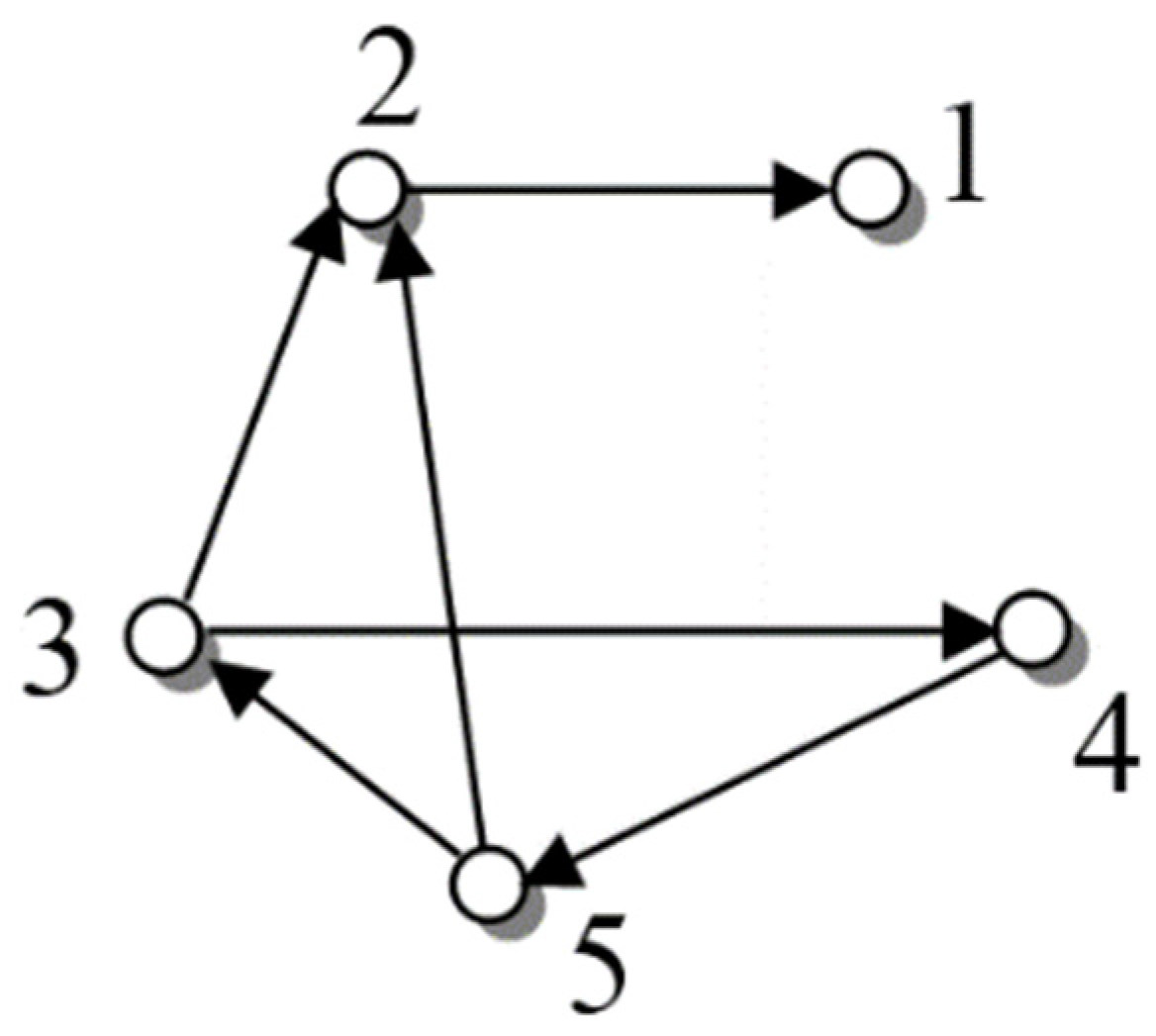
We then considered Example 1 with graph Gb of five agents shown in
Figure 7, which is concerned with
The eigenvalues of the Laplacian matrix for the graph are
We have
, which makes
and
and
, where
,
,
and
are the same as for Example 1. The interval matrices of all matrices in the form of Equation (9) are
with
That means that
and
. We can easily check that all eigenvalues of vertex matrices lay in the stable region. The existence of
and
can be evaluated using the LMI formulation.
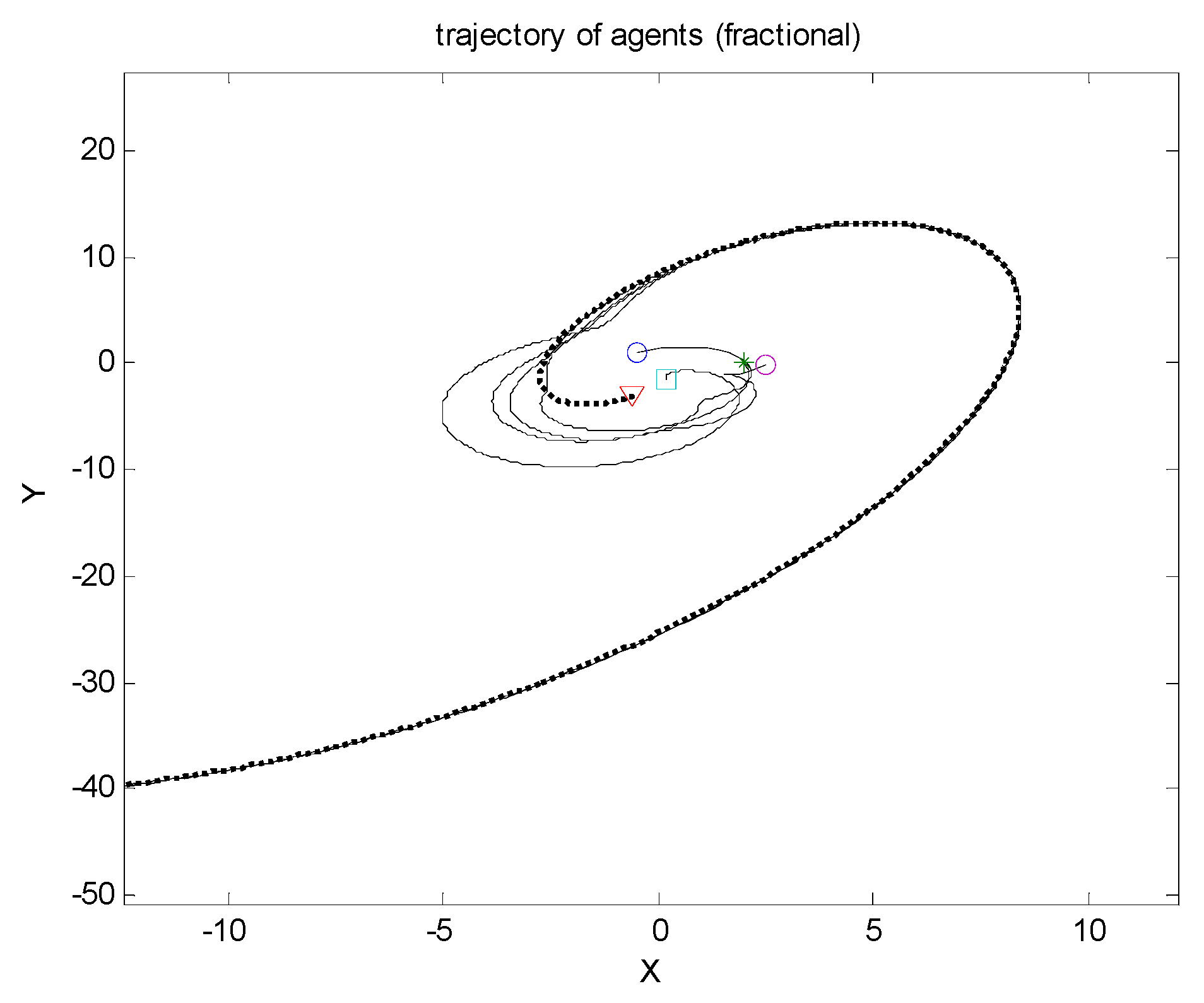
Figure 7 shows the trajectories of the agents in the x–y plane. As is evident, although each agent was not stable, the whole FOMAS achieved consensus.
Figure 8 is showing the trajectory of agents in X-Y plane and
Figure 9 shows the average distance between agents, which is calculated according to the formulation
. It is evident that the relative movements were Lyapunov asymptotically stable, which again prove that the agents converged and the interval FOMAS in Equation (10) along with the graph in
Figure 7 reached robust consensus. As can be seen from
Figure 8 and
Figure 9, the dynamic of each agent was not stable. However, the average distance among the agents converged to zero, which means consensus.
5. Discussion
If we want to briefly discuss the idea presented in this paper, it should be said that if the dynamic matrices of agents in a FOMAS are stable, they all tend to zero and consensus is achieved. However, this consensus is due to the fact that the state variables of the agents are zero, and as a result, it is an obvious consensus regardless of the communication between agents.
However, if the dynamics of the agents are unstable, that is, the agents take a divergent path over time, it is still possible to converge together, which is discussed in Theorem 2. Unstable agents can still reach consensus if first, the graph between the agents has a spanning tree (conceptually, this means that all the agents should be related to each other) and second, the matrices are all -Hurwitz.
Now, the problem is what should be done when the dynamics of individual agents, i.e., matrix A, and the interactive dynamics of agents, i.e., matrix F, have internal uncertainties. To achieve consensus according to Theorem 1, it is necessary to check the stability of the infinite matrix, which is not possible. In this paper, the idea is that it is not necessary to check the stability of countless matrices.
In Theorem 4, it is shown that if the dynamic matrix of agents has internal uncertainties, the consensus condition is that first, the graph between the agents has a spanning tree, and second, instead of countless matrices, only a limited number of vertex matrices need to be used in Lyapunov inequalities in Theorem 4 to find some Hermitian matrices for and and for .
In Examples 1 to 3, as can be seen, despite the fact that the agents were all unstable and the dynamics of the agents had internal uncertainties, because the conditions of Theorem 4 were satisfied for them, consensus was achieved and the average distance among the agents converged to zero.
6. Conclusions
The consensus problem of high-order fractional-order multi-agent systems with interval uncertainties is addressed in this paper for both fractional orders and . In order to achieve consensus, this article provided a precise robust stability requirement for interval FOMAS. It is established that the fractional-order interval linear multi-agent system achieves consensus if and only if there are Hermitian matrices such that some specific types of complex Lyapunov inequalities are met for all of the system vertex matrices using the existence condition of the Hermitian. The efficiency of the suggested strategy is proven by the simulation results.
Developing the dynamic model of agents in FOMAS in nonlinear form instead of a linear one; considering other types of uncertainties, such as non-parametric uncertainties instead of internal uncertainties; examining the conditions for reaching consensus in the presence of faults and defects, external disturbances, unmolded dynamics, or unknown inputs; and finally, the design of the input controller to achieve consensus in the presence of various uncertainties in FOMAS can be considered as future works for the current research.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








