
Global Attractivity of Symbiotic Model of Commensalism in Four Populations with Michaelis–Menten Type Harvesting in the First Commensal Populations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Main Results
3. Lemmas
4. Proof of the Main Results
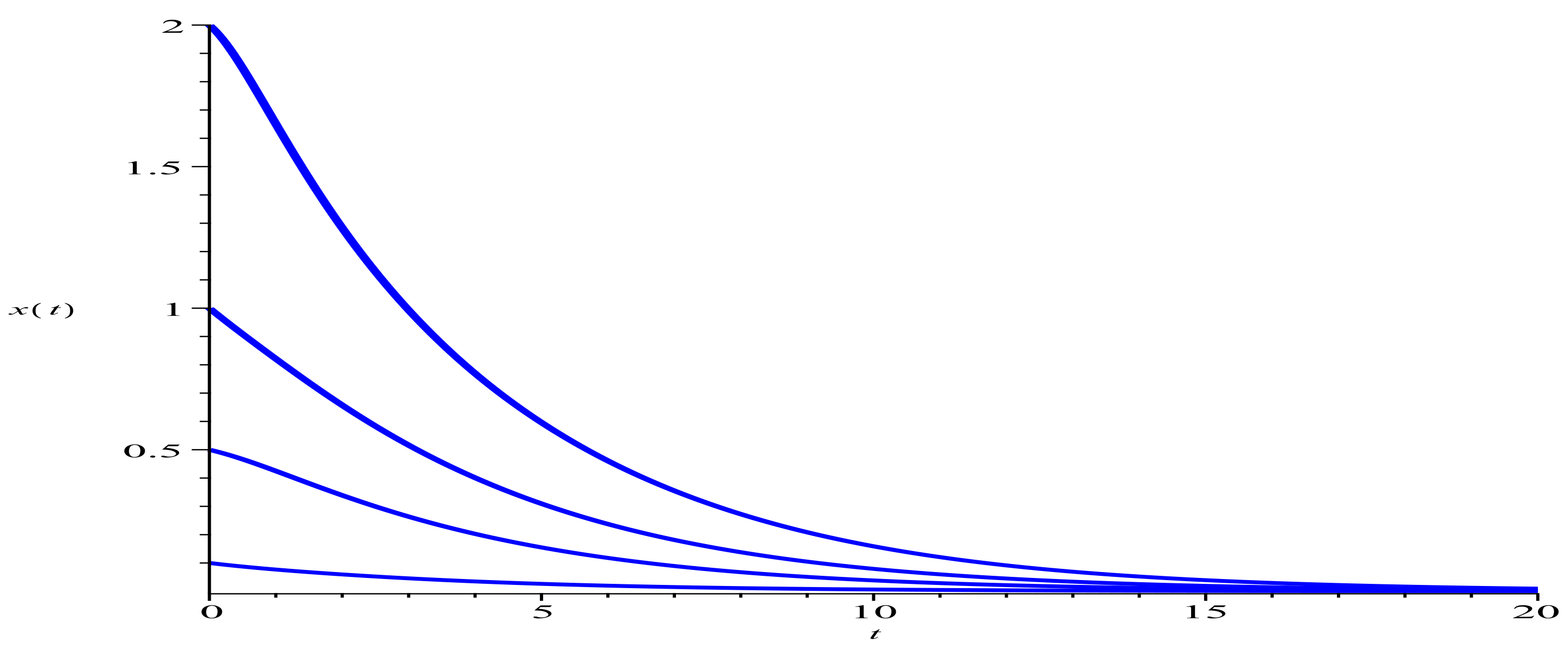
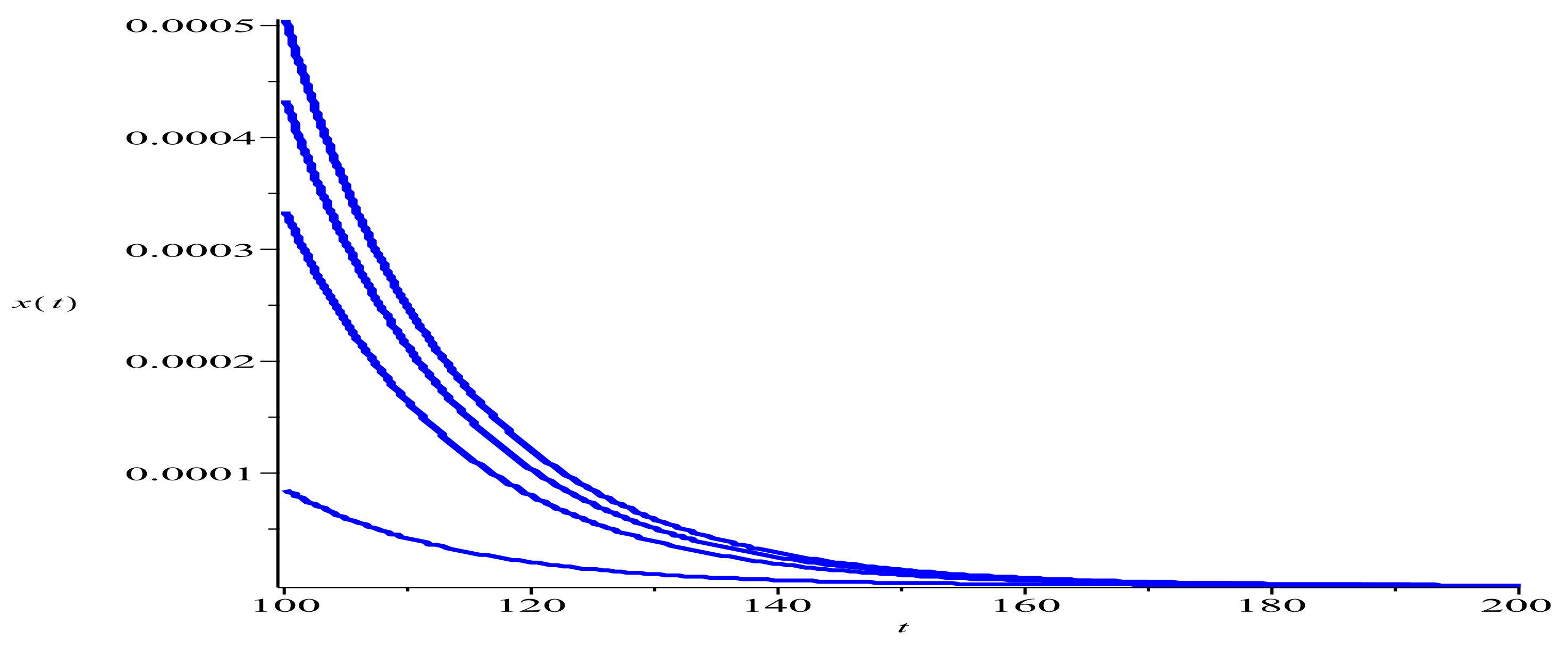
5. Numeric Simulations










6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deng, M. Stability of a stochastic delay commensalism model with Lvy jumps. Phys. A 2019, 527, 121061. [Google Scholar] [CrossRef]
- Wu, R.; Lin, L.; Zhou, X. A commensal symbiosis model with Holling type functional response. J. Math. Comput. Sci. 2016, 16, 364–371. [Google Scholar] [CrossRef] [Green Version]
- Wu, R.; Lin, L.; Zhou, X. Dynamic behaviors of a commensal symbiosis model with ratio-dependent functional response and one party can not survive independently. J. Math. Comput. Sci. 2016, 16, 495–506. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.C.; Sun, H. Analysis on symbiosis model of two populations. J. Weinan Norm. Univ. 2013, 28, 6–8. [Google Scholar]
- Su, Q.; Chen, F. The influence of partial closure for the populations to a non-selective harvesting Lotka-Volterra discrete amensalism model. Adv. Differ. Equ. 2019, 2019, 281. [Google Scholar] [CrossRef]
- Xue, Y.; Xie, X.; Chen, F.; Han, R. Almost periodic solution of a discrete commensalism system. Discret. Dyn. Nat. Soc. 2015, 2015, 295483. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Miao, Z.; Xue, Y. Positive periodic solution of a discrete Lotka-Volterra commensal symbiosis model. Commun. Math. Biol. Neurosci. 2015, 2015, 2. [Google Scholar]
- Xue, Y.; Xie, X.; Lin, Q. Almost periodic solutions of a commensalism system with Michaelis–Menten type harvesting on time scales. Open Math 2019, 17, 1503–1514. [Google Scholar] [CrossRef]
- Li, T.; Lin, Q.; Chen, J. Positive periodic solution of a discrete commensal symbiosis model with Holling II functional response. Commun. Math. Biol. Neurosci. 2016, 2016, 22. [Google Scholar]
- Lei, C. Dynamic behaviors of a stage-structured commensalism system. Adv. Differ. Equ. 2018, 2018, 301. [Google Scholar] [CrossRef] [Green Version]
- Lin, Q. Allee effect increasing the final density of the species subject to the Allee effect in a Lotka-Volterra commensal symbiosis model. Adv. Differ. Equ. 2018, 2018, 196. [Google Scholar] [CrossRef]
- Chen, B. Dynamic behaviors of a commensal symbiosis model involving Allee effect and one party can not survive independently. Adv. Differ. Equ. 2018, 2018, 212. [Google Scholar] [CrossRef]
- Wu, R.; Li, L.; Lin, Q. A Holling type commensal symbiosis model involving Allee effect. Commun. Math. Biol. Neurosci. 2018, 2018, 6. [Google Scholar]
- Lei, C. Dynamic behaviors of a Holling type commensal symbiosis model with the first species subject to Allee effect. Commun. Math. Biol. Neurosci. 2019, 2019, 3. [Google Scholar]
- Guan, X.; Chen, F. Dynamical analysis of a two species amensalism model with Beddington-DeAngelis functional response and Allee effect on the second species. Nonlinear Anal. Real World Appl. 2019, 48, 71–93. [Google Scholar] [CrossRef]
- Wei, Z.; Xia, Y.; Zhang, T. Stability and bifurcation analysis of a commensal model with additive Allee effect and nonlinear growth rate. Int. J. Bifurc. Chaos, 2021; 31, 2150204. [Google Scholar] [CrossRef]
- He, X.; Zhu, Z.; Chen, J.; Chen, F. Dynamical analysis of a Lotka Volterra commensalism model with additive Allee effect. Open Math. 2022, in press. [Google Scholar]
- Chen, L.; Liu, T.; Chen, F. Stability and bifurcation in a two-patch model with additive Allee effect. AIMS Math. 2022, 7, 536–551. [Google Scholar] [CrossRef]
- Xu, L.; Lin, Q.; Lei, C. Dynamic behavior of commensal symbiosis system with both feedback control and Allee effect. J. Shanghai Norm. Univ. Sci. 2022, 51, 391–396. [Google Scholar]
- Han, R.; Chen, F. Global stability of a commensal symbiosis model with feedback controls. Commun. Math. Biol. Neurosci. 2015, 2015, 15. [Google Scholar]
- Chen, F.; Chong, Y.; Lin, S. Global stability of a commensal symbiosis model with Holling II functional response and feedback controls. Wseas Trans. Syst. Contr. 2022, 17, 279–286. [Google Scholar] [CrossRef]
- Chen, J.; Wu, R. A commensal symbiosis model with non-monotonic functional response. Commun. Math. Biol. Neurosci. 2017, 2017, 5. [Google Scholar]
- Xu, L.; Xue, Y.; Xie, X.; Lin, Q. Dynamic behaviors of an obligate commensal symbiosis model with Crowley-Martin functional responses. Axioms 2022, 11, 298. [Google Scholar] [CrossRef]
- Li, T.; Wang, Q. Stability and Hopf bifurcation analysis for a two-species commensalism system with delay. Qual. Theory Dyn. Syst. 2021, 20, 83. [Google Scholar] [CrossRef]
- Zhang, J. Global existence of bifurcated periodic solutions in a commensalism model with delays. Appl. Math. Comput. 2012, 218, 11688–11699. [Google Scholar] [CrossRef]
- Ji, W.; Meng, L. Optimal harvesting of a stochastic commensalism model with time delay. Phys. A 2019, 527, 121284. [Google Scholar] [CrossRef]
- Chen, B. The influence of commensalism on a Lotka-Volterra commensal symbiosis model with Michaelis–Menten type harvesting. Adv. Differ. Equ. 2019, 2019, 43. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Xie, X.; Lin, Q. Permanence, partial survival, extinction, and global attractivity of a nonautonomous harvesting Lotka-Volterra commensalism model incorporating partial closure for the populations. Adv. Differ. Equ. 2018, 2018, 211. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Guan, X.; Xie, X.; Lin, Q. On the existence and stability of positive periodic solution of a nonautonomous commensal symbiosis model with Michaelis–Menten type harvesting. Commun. Math. Biol. Neurosci. 2019, 2019, 2. [Google Scholar]
- Deng, H.; Huang, X. The influence of partial closure for the populations to a harvesting Lotka-Volterra commensalism model. Commun. Math. Biol. Neurosci. 2018, 2018, 10. [Google Scholar]
- Puspitasari, N.; Kusumawinahyu, W.; Trisilowati, T. Dynamic analysis of the symbiotic model of commensalism and parasitism with harvesting in commensal populations. JTAM (J. Teor. Apl. Mat.) 2021, 5, 193–204. [Google Scholar] [CrossRef]
- Jawad, S. Study the dynamics of commensalism interaction with Michaels-Menten type prey harvesting. Al-Nahrain J. Sci. 2022, 25, 45–50. [Google Scholar] [CrossRef]
- Kumar, G.; Srinivas, M. Influence of spatiotemporal and noise on dynamics of a two species commensalism model with optimal harvesting. Res. J. Pharm. Technol. 2016, 9, 1717–1726. [Google Scholar] [CrossRef]
- Yu, X.; Zhu, Z.; Lai, L.; Chen, F. Stability and bifurcation analysis in a single-species stage structure system with Michaelis–Menten-type harvesting. Adv. Differ. Equ. 2020, 2020, 238. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, L.; Huang, X.; Deng, H. Stability and bifurcation analysis of two species amensalism model with Michaelis–Menten type harvesting and a cover for the first species. Adv. Differ. Equ. 2018, 2018, 295. [Google Scholar] [CrossRef]
- Zhu, Z.; Chen, F.; Lai, L.; Li, Z. Dynamic behaviors of a discrete May type cooperative system incorporating Michaelis–Menten type harvesting. IAENG Int. J. Appl. Math. 2020, 50, 1–10. [Google Scholar]
- Yu, X.; Zhu, Z.; Chen, F. Dynamic behaviors of a single species stage structure model with Michaelis–Menten-type juvenile population harvesting. Mathematics 2020, 8, 1281. [Google Scholar] [CrossRef]
- Zhu, Z.; Wu, R.; Chen, F.; Li, Z. Dynamic behaviors of a Lotka-Volterra commensal symbiosis model with non-selective Michaelis–Menten type harvesting. IAENG Int. J. Appl. Math. 2020, 50, 396–404. [Google Scholar]
- Puspitasari, N.; Kusumawinahyu, W.; Trisilowati, T. Dynamical analysis of the symbiotic model of commensalism in four populations with Michaelis–Menten type harvesting in the first commensal population. JTAM (J. Teor. Apl. Mat.) 2021, 5, 392–404. [Google Scholar]
- Chen, F.; Zhou, Q.; Lin, S. Global stability of symbiotic medel of commensalism and parasitism with harvesting in commensal populations. WSEAS Trans. Math. 2022, 21, 424–432. [Google Scholar] [CrossRef]
- Zhou, Q.; Lin, S.; Chen, F.; Wu, R. Positive periodic solution of a discrete Lotka-Volterra commensal symbiosis model with Michaelis–Menten type harvesting. WSEAS Trans. Math. 2022, 21, 515–523. [Google Scholar] [CrossRef]
- Martsenyuk, V.; Augustynek, K.; Urbas, A. On qualitative analysis of the nonstationary delayed model of coexistence of two-strain virus: Stability, bifurcation, and transition to chaos. Int. J. Nonlinear Mech. 2021, 128, 103630. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Palencia, E.; Francoise, J.P. On Predation-commensalism processes as models of bi-stability and constructive role of systemic extinctions. Acta Biotheor. 2021, 69, 497–510. [Google Scholar] [CrossRef] [PubMed]
- Seval, I. Stability and period-doubling Bifurcation in a modified commensal symbiosis model with Allee effect. Erzincan Univ. J. Sci. Technol. 2022, 15, 310–324. [Google Scholar]
- Akimenko, V. Stability analysis of delayed age-structured resource-consumer model of population dynamics with saturated intake rate. Front. Ecol. Evol. 2021, 9, 531833. [Google Scholar] [CrossRef]
- Lemes, P.; Barbosa, F.G.; Naimi, B.; Araujo, M.B. Dispersal abilities favor commensalism in animal-plant interactions under climate change. Sci. Total Environ. 2022, 835, 155157. [Google Scholar] [CrossRef]
- Chen, S.; Ren, Y. Small amplitude periodic solution of Hopf Bifurcation Theorem for fractional differential equations of balance point in group competitive martial arts. Appl. Math. Nonlinear Sci. 2021, 6. [Google Scholar] [CrossRef]
- Jiang, Q.; Liu, Z.; Wang, Q.; Tan, R.; Wang, L. Two delayed commensalism models with noise coupling and interval biological parameters. J. Appl. Math. Comput. 2022, 68, 979–1011. [Google Scholar] [CrossRef]
- Chen, F.D. On a nonlinear non-autonomous predator-prey model with diffusion and distributed delay. J. Comput. Appl. Math. 2005, 180, 33–49. [Google Scholar] [CrossRef] [Green Version]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Xue, Y.; Lin, Q.; Lei, C. Global Attractivity of Symbiotic Model of Commensalism in Four Populations with Michaelis–Menten Type Harvesting in the First Commensal Populations. Axioms 2022, 11, 337. https://doi.org/10.3390/axioms11070337
Xu L, Xue Y, Lin Q, Lei C. Global Attractivity of Symbiotic Model of Commensalism in Four Populations with Michaelis–Menten Type Harvesting in the First Commensal Populations. Axioms. 2022; 11(7):337. https://doi.org/10.3390/axioms11070337
Chicago/Turabian StyleXu, Lili, Yalong Xue, Qifa Lin, and Chaoquan Lei. 2022. "Global Attractivity of Symbiotic Model of Commensalism in Four Populations with Michaelis–Menten Type Harvesting in the First Commensal Populations" Axioms 11, no. 7: 337. https://doi.org/10.3390/axioms11070337