


New Estimation Method of an Error for J Iteration

Abstract
:1. Introduction
2. Preliminaries
3. Estimation of an Error for J Scheme
- (i)
- If or , then the errors estimation of (1) is bounded and cannot exceed the number N;
- (ii)
- If and, then random errors of (1) are controllable.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abbas, M.; Nazir, T. A new faster iteration process applied to constrained minimization and feasibility problems. Mat. Vesn 2014, 66, 223–234. [Google Scholar]
- Liu, L.S. Ishikawa and Mann iterative process with errors for nonlinear strongly accretive mappings in Banach spaces. J. Math. Anal. Appl. 1995, 194, 114–125. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, R.P.; Regan, D.O.; Sahu, D.R. Iterative construction of fixed points of nearly asymptotically nonexpansive mappings. J. Nonlinear Convex Anal. 2007, 8, 61–79. [Google Scholar]
- Rhoades, B.E. Some Fixed point iteration procedures. J. Nonlinear Convex Anal. 2007, 8, 61–79. [Google Scholar] [CrossRef] [Green Version]
- Karakaya, V.; Gursoy, F.; Erturk, M. Comparison of the speed of convergence among various iterative schemes. arXiv 2014, arXiv:1402.6080. [Google Scholar]
- Xu, Y. Ishikawa and Mann iterative process with errors for nonlinear strongly accretive operator equations. J. Math. Anal. Appl. 1998, 224, 91–101. [Google Scholar] [CrossRef] [Green Version]
- Chugh, R.; Kumar, V.; Kumar, S. Strong Convergence of a new three step iterative scheme in Banach spaces. Am. J. Comp. Math. 2012, 2, 345–357. [Google Scholar] [CrossRef] [Green Version]
- Karahan, I.; Ozdemir, M. A general iterative method for approximation of fixed points and their applications. Adv. Fixed. Point. Theor. 2013, 3, 510–526. [Google Scholar]
- Khan, A.R.; Gursoy, F.; Dogan, K. Direct Estimate of Accumulated Errors for a General Iteration Method. MAPAS 2019, 2, 19–24. [Google Scholar]
- BBerinde, V. Iterative Approximation of Fixed Points; Springer: Berlin, Germany, 2007. [Google Scholar]
- Hussain, N.; Ullah, K.; Arshad, M. Fixed point Approximation of Suzuki Generalized Nonexpansive Mappings via new Faster Iteration Process. JLTA 2018, 19, 1383–1393. [Google Scholar]
- BBhutia, J.D.; Tiwary, K. New iteration process for approximating fixed points in Banach spaces. JLTA 2019, 4, 237–250. [Google Scholar]
- Hussain, A.; Ali, D.; Karapinar, E. Stability data dependency and errors estimation for general iteration method. Alexandra Eng. J. 2021, 60, 703–710. [Google Scholar] [CrossRef]
- Noor, M.A. New approximation schemes for general variational inequalities. J. Math. Anal. Appl. 2000, 251, 217–229. [Google Scholar] [CrossRef] [Green Version]
- Mann, W.R. Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4, 506–510. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpensaive mappings. Bull. Am. Math. Soc. 1967, 73, 595–597. [Google Scholar] [CrossRef] [Green Version]
- Ullah, K.; Arshad, M. New three-step iteration process and fixed point approximation in Banach spaces. JLTA 2018, 7, 87–100. [Google Scholar]
- Thakur, B.S.; Thakur, D.; Postolache, M. A new iterative scheme for numerical reckoning fixed points of Suzuki’s generalized nonexpansive mappings. App. Math. Comp. 2016, 275, 147–155. [Google Scholar] [CrossRef]
- Ullah, K.; Arshad, M. New Iteration Process and numerical reckoning fixed points in Banach. U.P.B. Sci. Bull. Ser. A 2017, 79, 113–122. [Google Scholar]
- Ullah, K.; Arshad, M. Numerical reckoning fixed points for Suzuki’s generalized nonexpansive mappings via new iteration process. Filomat 2018, 32, 187–196. [Google Scholar] [CrossRef]
- Alqahtani, B.; Aydi, H.; Karapinar, E.; Rakocevic, V. A Solution for Volterra Fractional Integral Equations by Hybrid Contractions. Mathematics 2019, 7, 694. [Google Scholar] [CrossRef] [Green Version]
- Goebel, K.; Kirk, W.A. Topic in Metric Fixed Point Theory Application; Cambridge Universty Press: Cambridge, UK, 1990. [Google Scholar]
- Harder, A.M. Fixed Point Theory and Stability Results for Fixed Point Iteration Procedures. Ph.D Thesis, University of Missouri-Rolla, Parker Hall, USA, 1987. [Google Scholar]
- Weng, X. Fixed point iteration for local strictly pseudocontractive mapping. Proc. Am. Math. Soc. 1991, 113, 727–731. [Google Scholar] [CrossRef]
- Soltuz, S.M.; Grosan, T. Data dependence for Ishikawa iteration when dealing with contractive like operators. Fixed Point Theory Appl. 2008, 2008, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Liu, Z. On estimation and control of errors of the Mann iteration process. J. Math. Anal. Appl. 2003, 286, 804–806. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Liu, Z.; Kang, S.M. Accumulation and control of random errors in the Ishikawa iterative process in arbitrary Banach space. Comput. Math. Appl. 2011, 61, 2217–2220. [Google Scholar] [CrossRef]
- Suantai, S.; Phuengrattana, W. On the rate of convergence of Mann, Ishikawa, Noor and SP iterations for continuous functions on an arbitrary interval. J. Comput. Appl. Math. 2011, 235, 3006–3014. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
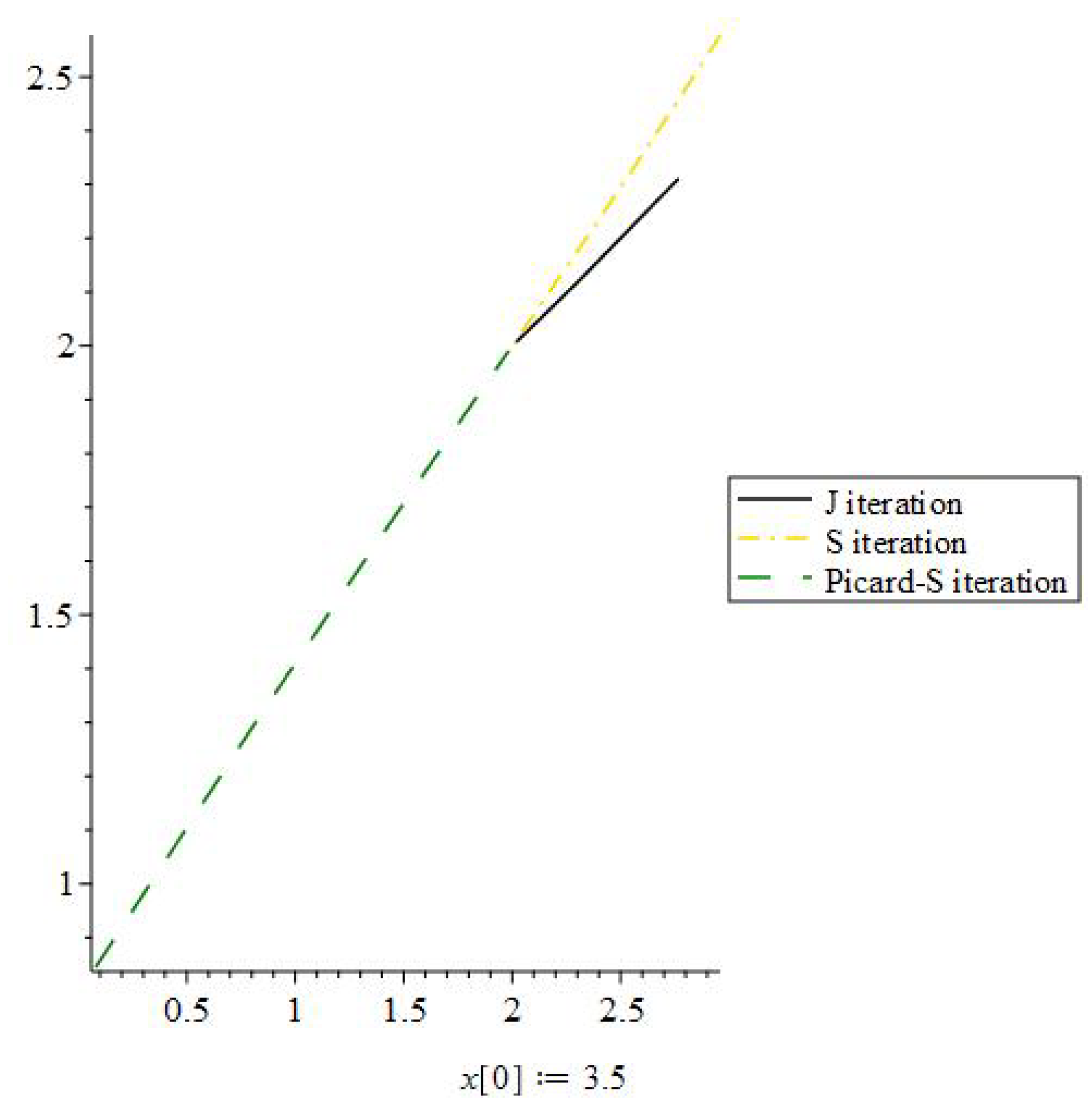
| S | Picard-S | J | |
|---|---|---|---|
| 3.5 | 3.5 | 3.5 | |
| 3.2 | 2.96 | 2.31142 | |
| 2.9024 | 2.57754 | 2.12239 | |
| 2.66692 | 2.34146 | 2.04751 | |
| 2.48921 | 2.20038 | 2.05893 | |
| 2.35737 | 2.1171 | 2.01832 | |
| 2.26037 | 2.06825 | 2.00703 | |
| 2.18935 | 2.03971 | 2.00269 | |
| 2.13752 | 2.02307 | 2.00102 | |
| 2.09977 | 2.01339 | 2.00039 | |
| 2.07233 | 2.00777 | 2.00014 | |
| 2.05248 | 2.00456 | 2.00005 | |
| 2.03794 | 2.00261 | 2.00002 | |
| 2.02746 | 2.00151 | 2 | |
| 2.01987 | 2.00087 | 2 | |
| 2.01437 | 2.00051 | 2 | |
| 2.01039 | 2.00029 | 2 | |
| 2.00751 | 2.00017 | 2 | |
| 2.00543 | 2.0001 | 2 | |
| 2.00392 | 2.00006 | 2 | |
| 2.00283 | 2.00003 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, A.; Ali, D.; Hussain, N. New Estimation Method of an Error for J Iteration. Axioms 2022, 11, 677. https://doi.org/10.3390/axioms11120677
Hussain A, Ali D, Hussain N. New Estimation Method of an Error for J Iteration. Axioms. 2022; 11(12):677. https://doi.org/10.3390/axioms11120677
Chicago/Turabian StyleHussain, Aftab, Danish Ali, and Nawab Hussain. 2022. "New Estimation Method of an Error for J Iteration" Axioms 11, no. 12: 677. https://doi.org/10.3390/axioms11120677