1. Introduction
The International Energy Agency (IEA) points out that despite the growth of low-carbon emission fuels in recent decades, coal still dominates the global energy market. Today, the world’s coal consumption is 65% higher than that in 2000, and it still accounts for about 40% of the world’s power generation [
1]. As the depth of coal mining continues to increase, the difficulty of coal mining also increases sharply [
2]. Natural disasters such as high dust concentration, high ground temperature, and high rock pressure under deep conditions are more serious [
3]. To achieve the safe and efficient mining of coal, the robotization of mining equipment has become a research hotspot in the field of unmanned mining. Roadway tunneling is the front part of coal mining. However, the unmanned roadway tunneling face has been developing slowly due to the narrow working space, cumbersome process flow, and complex environment [
4,
5,
6]. The real-time perception of the position and attitude parameters of the roadheader in the process of cutting the coal wall is a key issue for realizing the unmanned tunneling face.
In cutting coal and rock, the roadheader is affected by many factors. The dislocation and attitude deviation of the whole machine will occur [
7]. Furthermore, the position and attitude of the fuselage are constantly changing. Even more serious phenomena such as “sideslip” and “tail swing” appear, which seriously affects the directional tunneling of the roadheader, reduces the quality of roadway forming and tunneling efficiency [
8]. Therefore, it is necessary to detect the position and attitude state of the roadheader during the cutting process, which will provide a parameter basis for the roadheader’s autonomous navigation and unmanned control. Fu et al. [
9,
10] proposed a detection system based on ultra-wideband technology and realized the continuous measurement of parameters of position and attitude of roadheader. Tao [
11] used a fully automatic total station to detect the spatial position of multiple prisms installed on the fuselage to calculate the position and attitude of the roadheader in the roadway. Jia [
12] applied the indoor positioning system (iGPS) to underground coal mines to realize the absolute position and attitude measurement of the roadheader. Du [
13] realized the real-time measurement of the roadheader’s position and attitude based on the machine vision method. The above methods are carried out during the traveling or static state of the roadheader. However, in the cutting process, the cutting head rotates at high speed to cut the coal-rock wall, and the severe impact will drive the vibration of the fuselage. Moreover, the harsh environment of the roadway tunneling face, the poor light environment, and the serious dust suspension make the above methods subject to strong disturbances, so that accurate attitude and position parameters of the roadheader cannot be obtained.
Strapdown inertial navigation technology is based on Newton’s law of inertia to measure the attitude and position information of the carrier [
14]. The strapdown inertial navigation system (SINS) does not need to interact with external information during the work process and is particularly suitable for the harsh working environment of the tunneling face. However, SINS is extremely sensitive to the vibration of the carrier, which will cause serious drifting of the mathematical platform, resulting in calculation errors and affecting measurement accuracy. Miller [
15] proposed a three-subsample optimization algorithm for equivalent rotation vectors in a coning motion environment; On this basis, Musoff [
16] proposed the optimization index of the coning compensation algorithm; Savage [
17,
18] has performed a systematic study on the error compensation of sculling motion effect and scrolling motion effect. These studies have a certain generality, the compensation for errors is only based on a single frequency, and it cannot achieve suitable results for complex mechanical vibrations in specific environments.
To precisely compensate for the calculation error of SINS in a specific vibration environment, it is necessary to obtain the accurate vibration form of the carrier. Yang [
19] established the dynamic model of the double-drum shearer based on the force analysis of the shearer and compensated the SINS error according to the shearer’s vibration characteristics. Lai et al. [
20] analyzed the unmanned aerial vehicle’s vibration environment and compensated for the coning error of SINS under the conditions of sinusoidal vibration and random vibration, respectively. During the cutting process of the roadheader, various forms of complex angular vibration and linear vibration appear on its body. To obtain its specific form, a dynamic analysis of the roadheader is required. Li et al. [
21] used Lagrangian equations to derive the dynamic differential equation of the roadheader and obtained the mathematical model of the roadheader’s lateral and longitudinal vibration response. Hou [
22] obtained the vibration form of the roadheader in three directions based on the dynamic analysis of the cutting head based on ADAMS software. Scholars’ research on the vibration response of roadheaders only involves linear vibration, but the angular vibration, which is serious interference of SINS precision, is rarely studied.
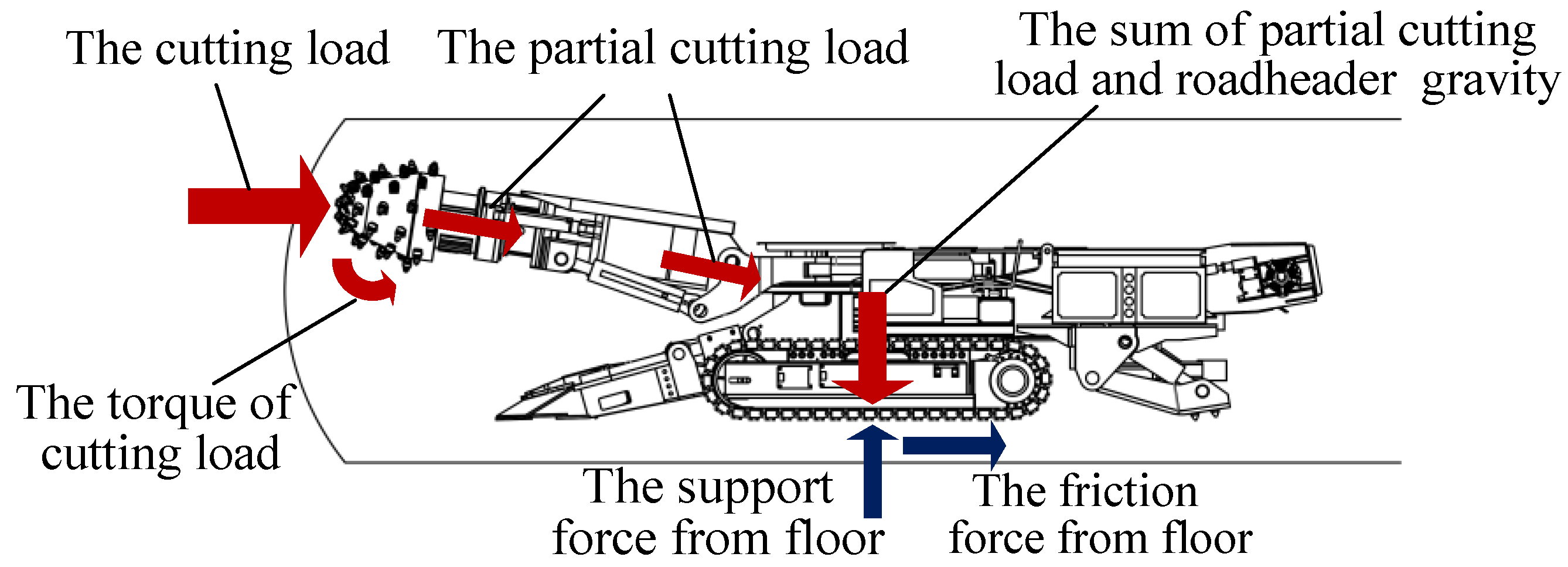
This paper proposes a compensation strategy for the SINS calculation error of the boom-type roadheader under a complex vibration environment. The force analysis of the roadheader and its cutting head is carried out, and a discrete calculation method is used to calculate its cutting load. On the above basis, the Lagrangian method is used to establish its dynamic model, and the characteristics of angular vibration and linear vibration are obtained. According to the angular vibration and linear vibration characteristics of the fuselage, multiple sub-samples compensation algorithms of the coning error and sculling error are constructed. The proposed SINS error compensation model is simulated and analyzed under different subsample compensation algorithms, different coal and rock characteristics, and different types of roadheaders, respectively. The main innovation of this paper is that through the force analysis of the roadheader and the construction of a multi-rigid body dynamic model, a multi-sample error compensation method of SINS based on the angular vibration and linear vibration of the roadheader body is proposed, which improves the accuracy of SINS applied to the roadheader in different situations.
The rest of this paper is organized as follows: In
Section 2, the dynamics of the roadheader are analyzed, and the vibration form is obtained.
Section 3 proposes the SINS calculation error compensation model. Simulation and analysis were carried out in
Section 4. Conclusions are drawn in
Section 5.
4. Simulation and Analysis for Compensation Algorithms
4.1. Simulation for Calculation Error Using Multi-Samples Compensation Algorithms
To verify the compensation effect of the method proposed in this paper on the linear vibration error and angular vibration error of the SINS in the process of cutting the coal wall of the boom-type roadheader, one-subsample, three-subsample, and four-subsample compensation algorithms were used for simulation and analysis, respectively. The vibration of the roadheader is highly arbitrary, and the changes are complex. It can be known from the third part of this paper that it is only an approximate method to fit the vibration of the roadheader with a certain curve during the update cycle. In view of the fact that the large calculation burden affects the real-time of the roadheader’s position and attitude parameter perception, the three-subsample and four-subsample compensation algorithms are selected for comparison and analysis, and the one-subsample algorithm (without compensation) is used as a reference.
This simulation takes the EBZ-160 type boom-type roadheader as an example. In the process of cutting the coal wall horizontally of the roadheader, when the vertical swing angle of the cutting arm is 8°, and the inclination angle of the coal seam is 10°, the swing speed of the cutting arm is 0.1 m/s, the rotational speed of the cutting head is 46 r/min, and the force amplitude is 80 kN. Take FOSN-type fiber SINS produced by China Aerospace Science and Industry Corporation Limited as an example, and its basic parameters are: the constant drift of the fiber-optic gyroscope is 0.01°/h, and the random drift is 0.005°/h; the constant drift of the quartz accelerometer is 30 μg, and the random drift is 30 μg; the data sampling frequency is 100 Hz. The simulation location is 116°20′ east longitude and 39°56′ north latitude. The local acceleration of gravity is ; the radius of curvature of the meridian is RM = 6,361,840.46 m; the radius of curvature of the prime vertical is ; and the angular velocity of the earth rotation is . The simulation lasts for 150 s.
Figure 8 shows the coning error curves of SINS with the compensation algorithm of one-subsample (OS), three-subsample (TS), and four-subsample (FS) during the roadheader cutting the coal wall horizontally: (a) is the error curve in X-direction, (b) is the error curve in Y-direction, (c) is the error curve in Z-direction. It can be seen from the figures that the error curves of the three compensation algorithms all vary periodically over time, and there are slight changes in a single period. Compared with the one-subsample algorithm, the improvement of compensation accuracy of the three-subsample and four-subsample compensation algorithm is more obvious. The compensation accuracy between the three-subsample and the four-subsample is relatively close. Since the one-sample compensation algorithm replaces the equivalent rotation vector by the angular increment directly, the third-sample and fourth-sample compensation algorithms use quadratic function and cubic function, respectively, to fit the equivalent rotation vector, which can effectively reduce the non-commutativity error.
The statistical properties of the simulation results of the coning error are shown in
Table 2. As the number of compensation sub-samples increases, the statistical values of the angular vibration error are all decreasing. The accuracy of the four-subsample algorithm is slightly improved compared with the three-subsample algorithm, while the calculation amount of the four-subsample algorithm is more than that of the three-subsample algorithm. The maximum values of the coning error in the X -direction, Y-direction, and Z-direction with the three-subsample compensation algorithms are
°, 0.0019°, and
°, respectively. It meets the accuracy requirements of the attitude and position detection of the roadheader. Therefore, it is more appropriate to use the three-sample compensation algorithm to compensate the angular vibration error of the SINS in the process of cutting the coal wall by the roadheader.
Figure 9 shows the sculling error curves of SINS with the compensation algorithms of one-subsample (OS), three-subsample (TS), and four-subsample (FS) during the roadheader is cutting the coal wall horizontally: (a) is the error curve in X-direction, (b) is the error curve in Y-direction, (c) is the error curve in Z-direction. It can be seen that the trend of the error curves of the roadheader SINS in those three directions with each subsample compensation algorithm is similar. As the number of sub-samples of the compensation algorithm increases, the amplitude of the linear vibration error decreases accordingly. The compensation effect of the three-subsample and the four-subsample algorithms are better than that of the one-subsample. The accuracy of the linear vibration error of the four-subsample is not significantly improved compared with the three-subsample. The statistical properties of the simulation results of the sculling error are shown in
Table 3. According to the above analysis of the coning error, comparing the one-subsample compensation algorithm with the three-subsample compensation algorithm, it can be obtained that the compensation accuracy of the three-subsample compensation algorithm relative to the one-subsample compensation algorithm is improved by 42.89% in the X-direction, 46.65% in the Y-direction, and 60.00% in the Z-direction.
4.2. Simulation for Calculation Error under Different Coal and Rock Characteristics
The coal wall contains gangue and hard inclusions with different compositions. Their contents, shapes, physical and mechanical properties are different. In addition, there are cracks in the coal structure, such as bedding and joints, so the properties of the coal wall are different. These natural factors make the cutting head of the roadheader bear the influence of varying loads in the process of coal breaking. From the analysis of
Section 2, it can be seen that the vibration characteristics of roadheader under different cutting loads are different, so it has important significance for the SINS calculation error analysis of roadheader under different coal and rock characteristics. The composition of the coal wall is roughly divided into three categories: coal, coal-gangue (the mixture of coal and gangue), and gangue. To analyze the error compensation characteristics of the roadheader when cutting coal walls with different compositions, simulation experiments were carried out under these three types of working environments.
Setting the roadheader to cut horizontally, the vertical swing angle of the cutting arm is 8°, the roadway inclination is 10°, the swing speed of the cutting arm is 0.1 m/s, and the speed of the cutting head is 46 r/min. As the hardness of coal, coal-gangue, and gangue increased successively, the reaction force on the cutting head during the cutting process also increases. According to the relationship between coal hardness coefficient and cutting force, the force amplitude of the cutting head is set to 80, 90, and 110 kN, respectively.
Other conditions are the same as simulation 4.1. The simulation results are shown in
Figure 10 and
Figure 11.
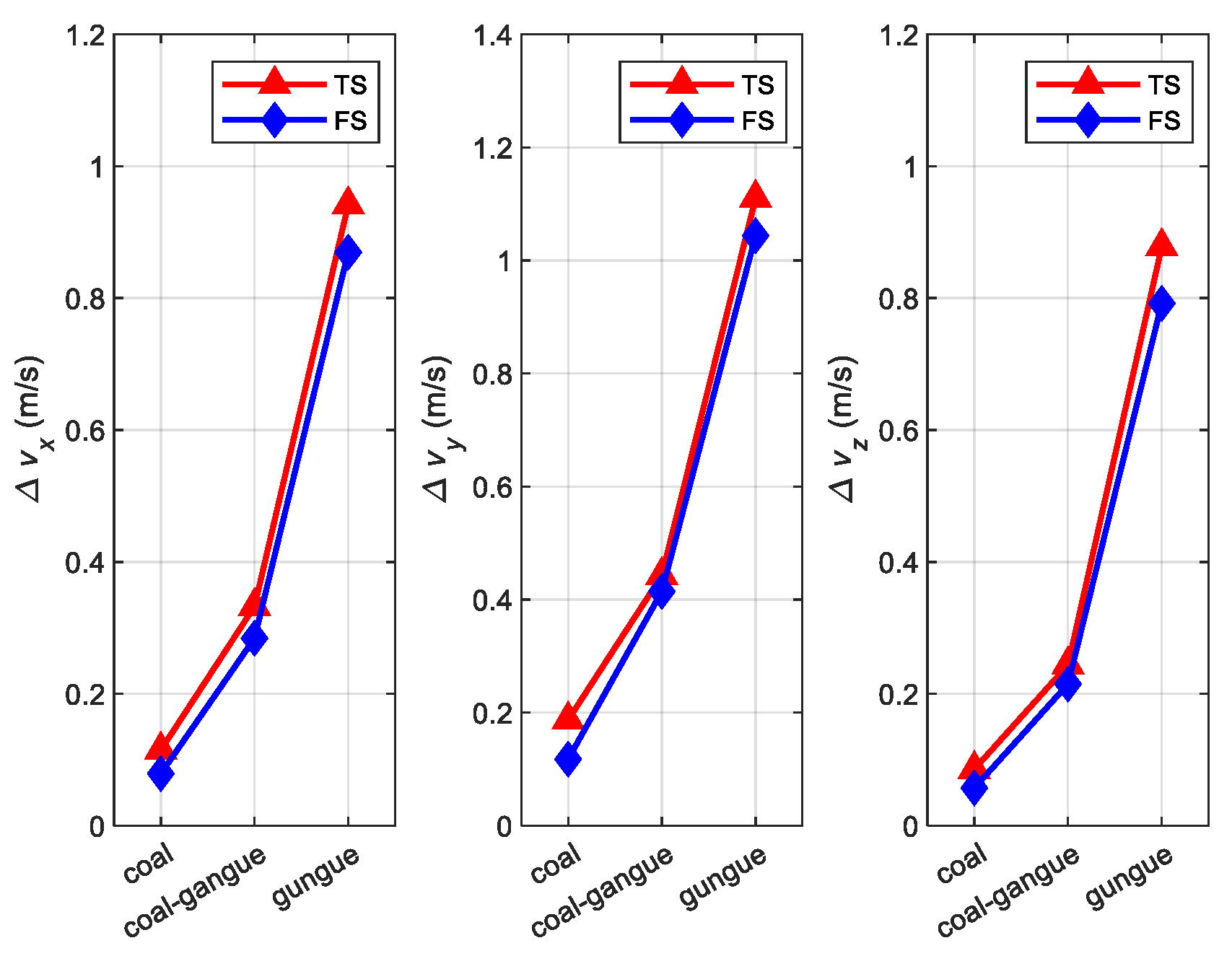
Figure 10 is the coning error statistics using the three-subsample (TS) compensation algorithm and four-subsample (FS) compensation algorithm under different coal and rock characteristics.
Figure 11 is the sculling error statistics using the three-subsample (TS) compensation algorithm and four-subsample (FS) compensation algorithm under different coal and rock characteristics. Both the coning error and the sculling error of the SINS vary with the vary of coal-rock characteristics and increase with the increase in coal-rock hardness. The error of cutting coal is the smallest, and the error of cutting gangue is the largest. Meanwhile, the increased amplitude of SINS error when roadheader cutting coal-gangue is nearly twice as high as when cutting gangue. The SINS error of the four-subsample compensation algorithm is slightly smaller than that of the three-subsample compensation algorithm.
4.3. Simulation for Calculation Error under Different Types of Roadheaders
For different types of roadheaders, the technical parameters such as the rated cutting power, the mass of the fuselage, and the external dimensions are different. The corresponding stiffness and damping coefficients are different, which results in different dynamic vibration characteristics of the roadheader. To analyze the vibration error of the roadheader SINS under different vibration characteristics, three types of roadheaders(EBZ160, EBZ260, and EBZ320) were selected as the research objects. The technical parameters of these three types of roadheader are, respectively, introduced into the dynamic model of roadheader established in
Section 2 above to obtain its dynamic characteristics, as shown in
Table 4. Based on this, the simulation experiments of angular vibration error and linear vibration of roadheader are carried out. Other conditions are the same as simulation 4.1. The simulation results are shown in
Figure 12 and
Figure 13.
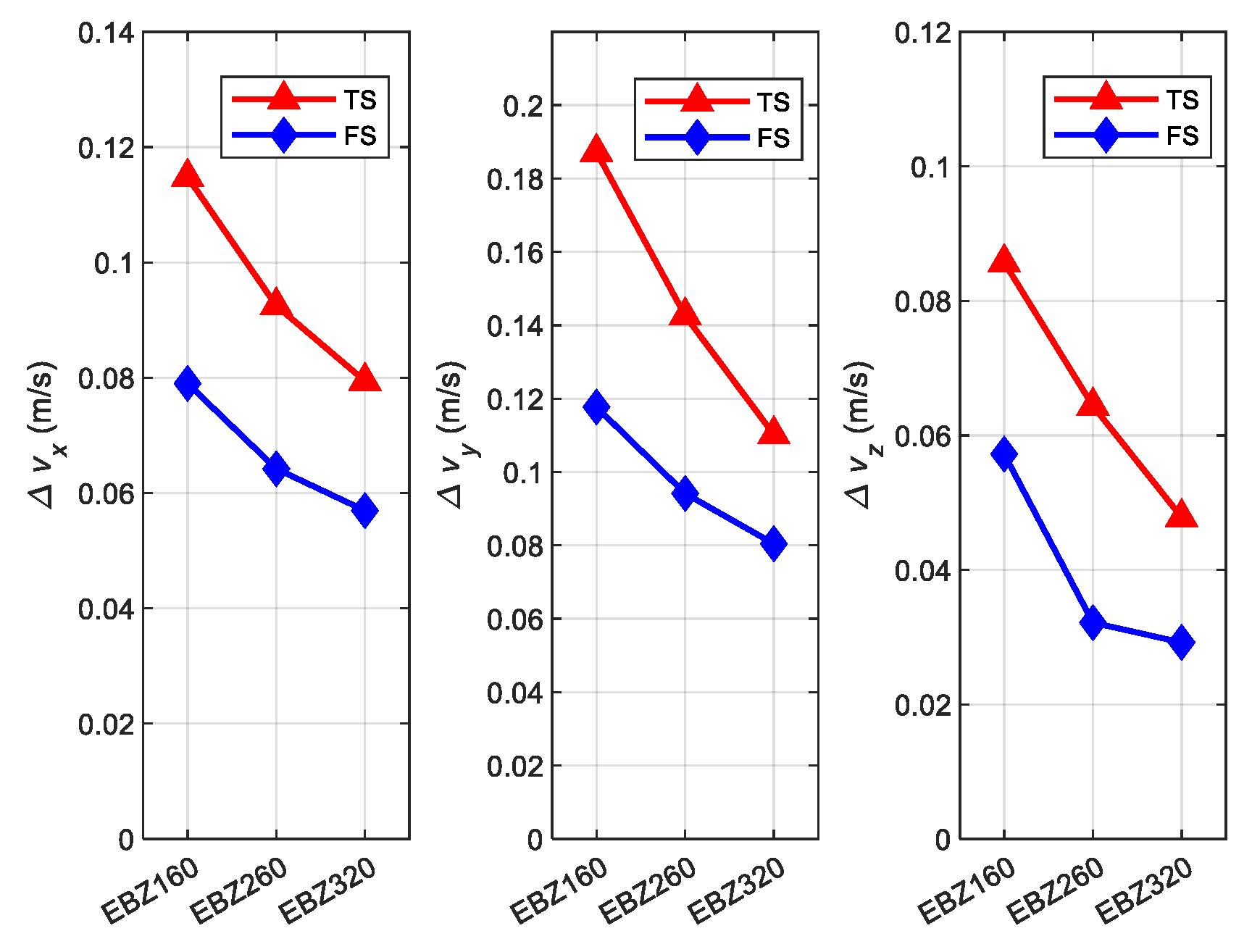
Figure 12 is the coning error statistics using the three-subsample (TS) compensation algorithm and four-subsample (FS) compensation algorithm under different types of roadheaders.
Figure 13 is the sculling error statistics using the three-subsample (TS) compensation algorithm and four-subsample (FS) compensation algorithm under different types of roadheaders. It can be seen from the two figures that the coning error and sculling error of the EBZ160-type roadheader are the lowest, while the coning error and sculling error of the EBZ320-type roadheader are the highest. With the increase in the rated cutting power of the roadheader, their coning error and sculling error are decreasing. The roadheader with large cutting power has a strong ability to withstand disturbances under the same external excitation, and its fuselage vibration frequency is smaller under the same external excitation. For the coning error and sculling error of the three types of roadheaders, the compensation effects of the three-subsample compensation algorithm and the four-subsample compensation algorithm are similar. Considering that the four-sample algorithm will greatly increase the computational burden, the three-sample compensation algorithm is applicable to all three kinds of roadheader. However, for the sculling error of the EBZ260-type roadheader in three directions, the compensation effect of the four-sample compensation algorithm is significantly improved than that of the three-subsample compensation algorithm, so the four-sample compensation algorithm is given priority when the system computing capacity allows.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}