
Towards the Dependence on Parameters for the Solution of the Thermostatted Kinetic Framework


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
- the coefficient , a function defined on , expressing the interaction rate of the particles whose state is with the particles whose state is , i.e.,— roughly speaking—the number of their interactions per unit time;
- 2.
- the coefficient , a function defined on , expressing the transition probability, i.e., the probability (density) that any individual in the state , when interacting with a particle in the state , falls in the state u.
2. The Basic Equations
2.1. The Continuous Activity Framework
- ;
- with the property:
- .
- is the interaction rate between the particles that are in the state and the particles in the state ;
- is the transition probability density i.e., the probability (density) that a particle in the state falls into the state u after interacting with a particle in the state ;
- is the value of the external force field acting on the system ;
- is the density, is the linear momentum and is the global energy;
- is the gain-term operator and is the loss-term operator.
2.2. The Discrete Activity Framework
- H1
- There exist , such that , for , and , for .
- H2
- , for all ,
- H3
- , for all ,
- H4
- 1.
- The evolution equation of takes the form
- 2.
- as ,
- 3.
- Denoting by the initial data of the Cauchy problem related to (4), one haswhere c is a constant depending on the system.
- the function , for , denotes the distribution function of the i-th functional subsystem;
- the function is the external force field acting on the whole system;
- The termrepresents the thermostat term, which allows for keeping constant the quantity :
- the term is the interaction rate related to the encounters between the functional subsystem h and the functional subsystem k, for ;
- the function denotes the transition probability density that the functional subsystem h falls into the i after interacting with the functional subsystem k, for ;
- the operator , for , models the net flux to the i-th functional subsystem; denotes the gain term operator (incoming flux) and the loss term operator (outgoing flux).
3. The Continuous Dependence on the Parameters
3.1. The Continuous Activity Framework
- (1)
- (2)
- a first attempt towards the instability of the solutions of Equation (1) for certain values of the two classes of parameters and .
- 1.
- the assumption is an estimate of the distance between the interaction rates;
- 2.
- the assumption is an estimate on the distance between the transition probability densities, “weighted” by the interaction rates.
3.2. The Discrete Activity Framework
4. A First Attempt towards the Instability with Respect to the Parameters
4.1. The Continuous Activity Framework
4.2. The Discrete Activity Framework
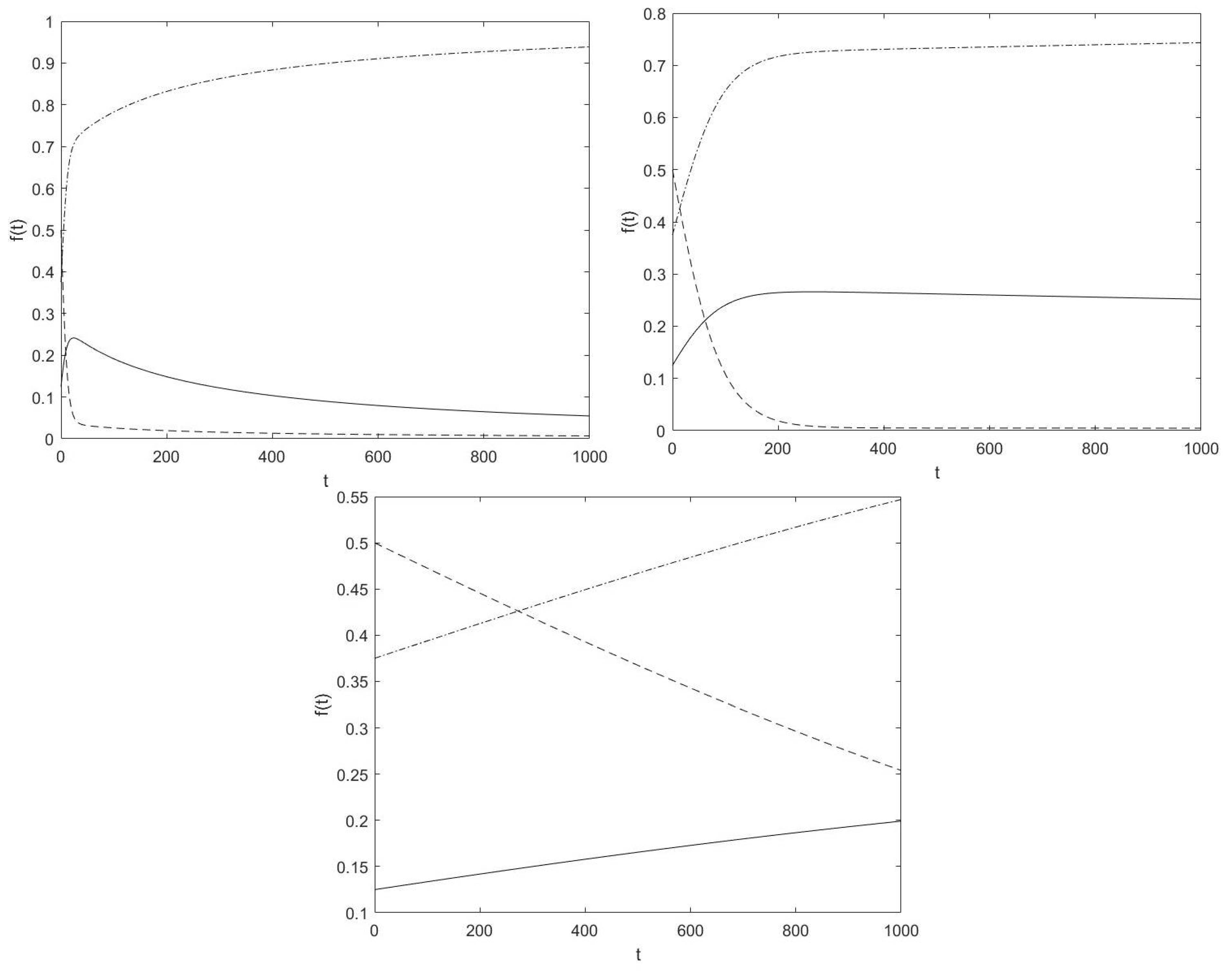
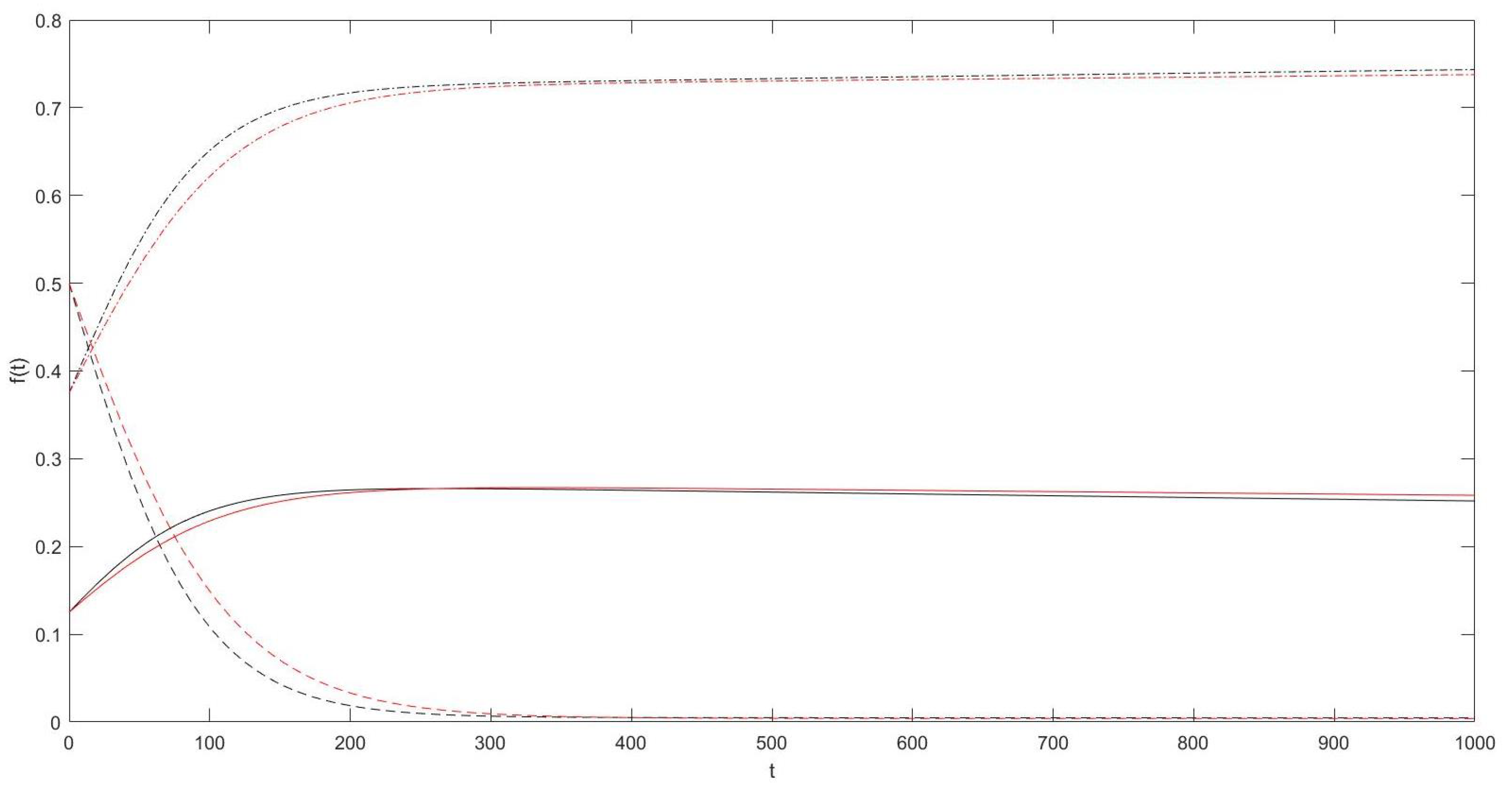
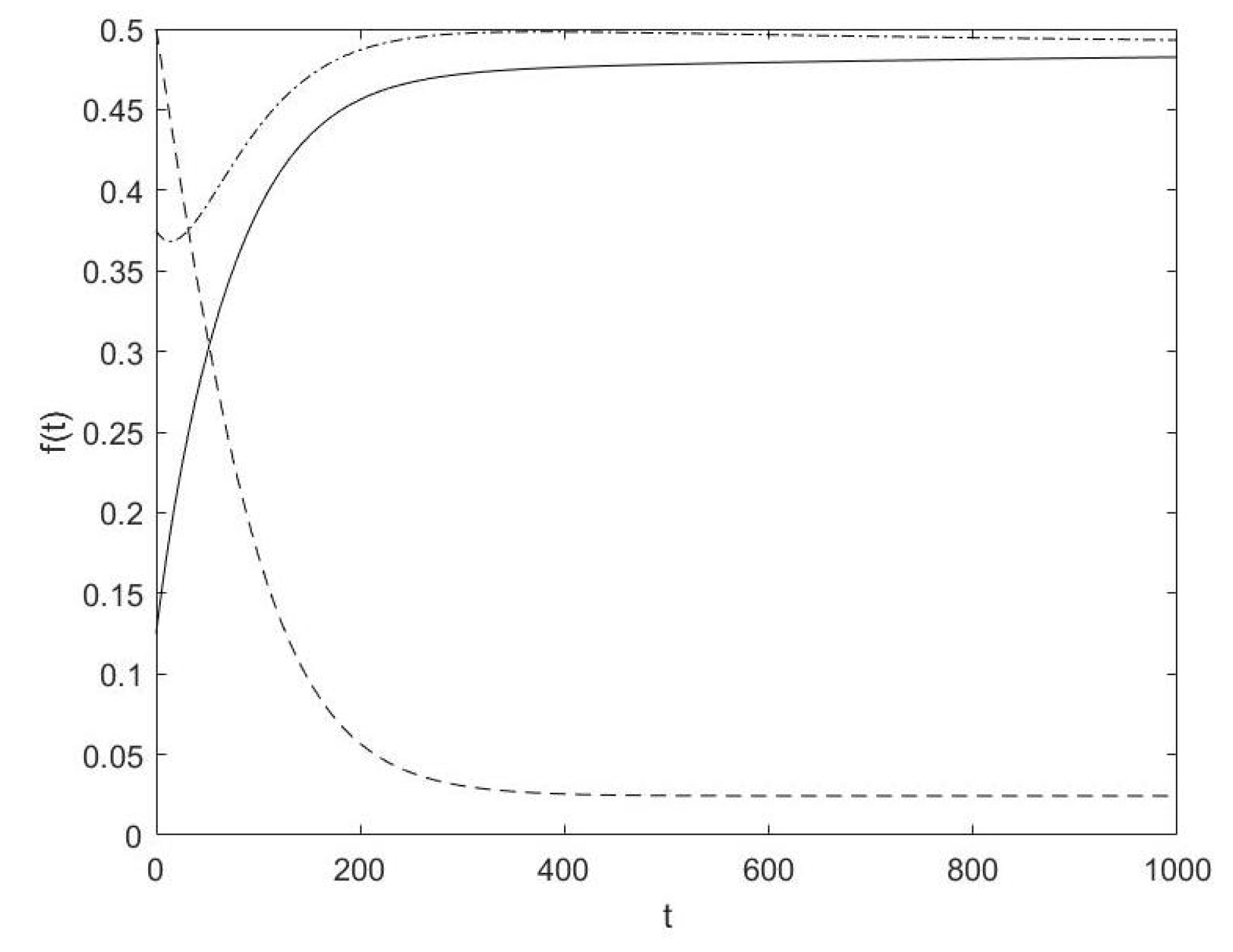
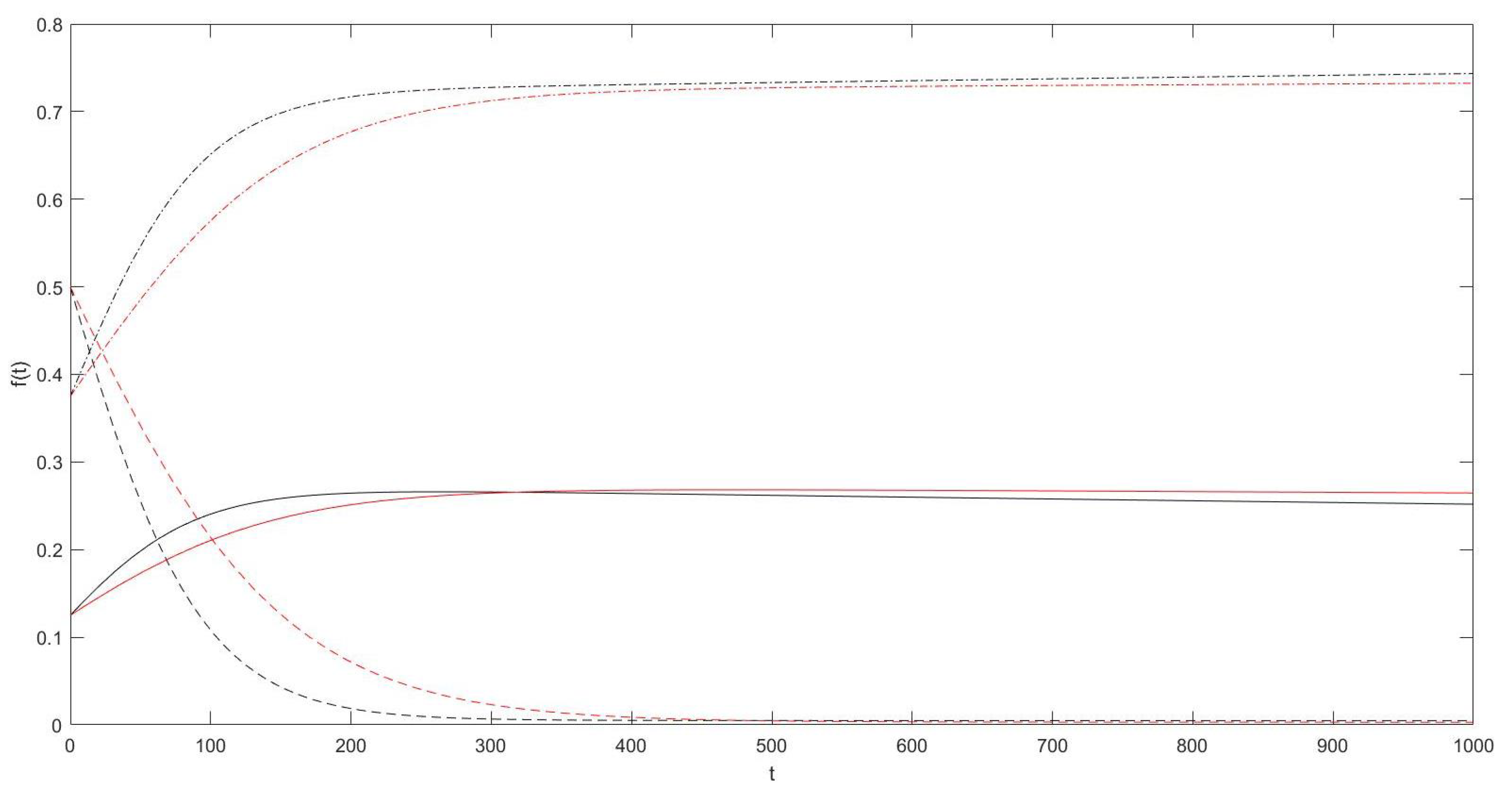
4.3. Numerical Simulations
- ;
- ;
- .
- where g is a non-increasing function of and s, and the parameters , for , are positive real numbers, depending on the particular system taken into account;
- that differs from only for and ;
- uniform.
5. Conclusions and Research Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bar-Yam, Y. Dynamics of Complex Systems; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Bianca, C. Modeling complex systems by functional subsystems representation and thermostatted-KTAP methods. Appl. Math. Inf. Sci. 2021, 6, 495–499. [Google Scholar]
- Cilliers, P. Complexity and Postmodernism: Understanding Complex Systems. S. Afr. J. Philos. 1999, 18, 275–278. [Google Scholar] [CrossRef]
- Morriss, G.P.; Dettmann, C.P. Thermostats: Analysis and application. Chaos Interdiscip. J. Nonlinear Sci. 1998, 8, 321–336. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bobylev, A.V.; Cercignani, C. Exact eternal solutions of the Boltzmann equation. J. Stat. Phys. 2002, 106, 1019–1038. [Google Scholar] [CrossRef]
- Cercignani, C. The boltzmann equation. In The Boltzmann Equation and Its Applications; Springer: New York, NY, USA, 1988; pp. 40–103. [Google Scholar]
- Cercignani, C.; Gabetta, E. Transport Phenomena and Kinetic Theory: Applications to Gases, Semiconductors, Photons, and Biological Systems; Springer Science & Business Media: Basel, Switzerland, 2007. [Google Scholar]
- Cercignani, C.; Illner, R.; Pulvirenti, M. The Mathematical Theory of Dilute Gases; Springer Science & Business Media: Basel, Switzerland, 2013; Volume 106. [Google Scholar]
- Bonabeau, E.; Theraulaz, G.; Deneubourg, J.L. Mathematical model of self-organizing hierarchies in animal societies. Bull. Math. Biol. 1996, 58, 661–717. [Google Scholar] [CrossRef]
- Thieme, H.R. Mathematics in Population Biology; Princeton University Press: Princeton, NJ, USA, 2018; Volume 12. [Google Scholar]
- Giorno, V.; Román-Román, P.; Spina, S.; Torres-Ruiz, F. Estimating a non-homogeneous Gompertz process with jumps as model of tumor dynamics. Comput. Stat. Data Anal. 2017, 107, 18–31. [Google Scholar] [CrossRef]
- Masurel, L.; Bianca, C.; Lemarchand, A. On the learning control effects in the cancer-immune system competition. Phys. A Stat. Mech. Its Appl. 2018, 506, 462–475. [Google Scholar] [CrossRef] [Green Version]
- Pappalardo, F.; Palladini, A.; Pennisi, M.; Castiglione, F.; Motta, S. Mathematical and computational models in tumor immunology. Math. Model. Nat. Phenom. 2012, 7, 186–203. [Google Scholar] [CrossRef] [Green Version]
- Poleszczuk, J.; Macklin, P.; Enderling, H. Agent-based modeling of cancer stem cell driven solid tumor growth. In Stem Cell Heterogeneity; Human Press: New York, NY, USA, 2016; pp. 335–346. [Google Scholar]
- Spina, S.; Giorno, V.; Román-Román, P.; Torres-Ruiz, F. A stochastic model of cancer growth subject to an intermittent treatment with combined effects: Reduction in tumor size and rise in growth rate. Bull. Math. Biol. 2014, 76, 2711–2736. [Google Scholar] [CrossRef]
- Bianca, C.; Kombargi, A. On the inverse problem for thermostatted kinetic models with application to the financial market. Appl. Math. Inf. Sci. 2017, 11, 1463–1471. [Google Scholar] [CrossRef]
- Bisi, M.; Spiga, G.; Toscani, G. Kinetic models of conservative economies with wealth redistribution. Commun. Math. Sci. 2009, 7, 901–916. [Google Scholar] [CrossRef] [Green Version]
- Carbonaro, B.; Serra, N. Towards mathematical models in psychology: A stochastic description of human feelings. Math. Model. Methods Appl. Sci. 2002, 12, 1453–1490. [Google Scholar] [CrossRef]
- Carbonaro, B.; Giordano, C. A second step towards a stochastic mathematical description of human feelings. Math. Comput. Model. 2005, 41, 587–614. [Google Scholar] [CrossRef]
- Bronson, R.; Jacobson, C. Modeling the dynamics of social systems. Comput. Math. Appl. 1990, 19, 35–42. [Google Scholar] [CrossRef] [Green Version]
- Buonomo, B.; Della Marca, R. Modelling information-dependent social behaviors in response to lockdowns: The case of COVID-19 epidemic in Italy. medRxiv 2020. [Google Scholar] [CrossRef]
- Fryer, R.G., Jr.; Roland, G. A model of social interactions and endogenous poverty traps. Ration. Soc. 2007, 19, 335–366. [Google Scholar] [CrossRef]
- Kacperski, K. Opinion formation model with strong leader and external impact: A mean field approach. Phys. A Stat. Mech. Its Appl. 1999, 269, 511–526. [Google Scholar] [CrossRef]
- Bianca, C.; Carbonaro, B.; Menale, M. On the Cauchy Problem of Vectorial Thermostatted Kinetic Frameworks. Symmetry 2020, 12, 517. [Google Scholar] [CrossRef] [Green Version]
- Bianca, C. An existence and uniqueness theorem to the Cauchy problem for thermostatted-KTAP models. Int. J. Math. Anal. 2012, 6, 813–824. [Google Scholar]
- Bianca, C.; Mogno, C. Qualitative analysis of a discrete thermostatted kinetic framework modeling complex adaptive systems. Commun. Nonlinear Sci. Numer. Simul. 2018, 54, 221–232. [Google Scholar] [CrossRef]
- Bianca, C.; Menale, M. A Convergence Theorem for the Nonequilibrium States in the Discrete Thermostatted Kinetic Theory. Mathematics 2019, 7, 673. [Google Scholar] [CrossRef] [Green Version]
- Bianca, C.; Menale, M. Existence and uniqueness of nonequilibrium stationary solutions in discrete thermostatted models. Commun. Nonlinear Sci. Numer. Simul. 2019, 73, 25–34. [Google Scholar] [CrossRef]
- Carbonaro, B.; Menale, M. Dependence on the Initial Data for the Continuous Thermostatted Framework. Mathematics 2019, 7, 612. [Google Scholar] [CrossRef] [Green Version]
- Carbonaro, B.; Menale, M. The mathematical analysis towards the dependence on the initial data for a discrete thermostatted kinetic framework for biological systems composed of interacting entities. AIMS Biophys. 2020, 7, 204. [Google Scholar]
- Bianca, C. Existence of stationary solutions in kinetic models with Gaussian thermostats. Math. Methods Appl. Sci. 2013, 2013, 1768–1775. [Google Scholar] [CrossRef]
- Bianca, C.; Menale, M. On the convergence towards nonequilibrium stationary states in thermostatted kinetic models. Math. Methods Appl. Sci. 2019, 42, 6624–6634. [Google Scholar] [CrossRef]
- Bianca, C. Thermostated kinetic equations as models for complex systems in physics and life sciences. Phys. Life Rev. 2012, 9, 359–399. [Google Scholar] [CrossRef] [PubMed]
- Bianca, C.; Mogno, C. Modelling pedestrian dynamics into a metro station by thermostatted kinetic theory methods. Math. Comput. Model. Dyn. Syst. 2018, 24, 207–235. [Google Scholar] [CrossRef]
- Bianca, C.; Menale, M. Mathematical Analysis of a Thermostatted Equation with a Discrete Real Activity Variable. Mathematics 2020, 8, 57. [Google Scholar] [CrossRef] [Green Version]
- Walter, W. Differential and Integral Inequalities; Springer-Verlag: Berlin/Heidelberg, Germany, 2012; Volume 55. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carbonaro, B.; Menale, M. Towards the Dependence on Parameters for the Solution of the Thermostatted Kinetic Framework. Axioms 2021, 10, 59. https://doi.org/10.3390/axioms10020059
Carbonaro B, Menale M. Towards the Dependence on Parameters for the Solution of the Thermostatted Kinetic Framework. Axioms. 2021; 10(2):59. https://doi.org/10.3390/axioms10020059
Chicago/Turabian StyleCarbonaro, Bruno, and Marco Menale. 2021. "Towards the Dependence on Parameters for the Solution of the Thermostatted Kinetic Framework" Axioms 10, no. 2: 59. https://doi.org/10.3390/axioms10020059