1. Introduction
As an efficient tool to generate smooth surfaces, subdivision schemes have been widely used in fields like computer graphics, animation, and games. In general, subdivision schemes can be divided into stationary and non-stationary ones, depending on whether the subdivision rules are relevant with the recursion level or not. Compared with the stationary ones, like the schemes in [
1], the non-stationary schemes have the advantage of being able to generate richer function spaces and more flexible surfaces with different shapes.
In connection with the design and application of non-stationary subdivision, there have been interesting works. In fact, apart from the non-stationary curve subdivision, like those in [
2,
3], there have been significant works on non-stationary surface subdivision. For this, Novara et al. [
4] proposed a non-stationary interpolatory scheme reproducing surfaces like the torus and the ellipsoid, which improves the smoothness and accuracy of the modified butterfly subdivision [
5]. Fang et al. [
6] presented a generalized order
d exponential spline surface subdivision which can generate surfaces like the torus and the sphere. Badoual et al. [
7] constructed a non-stationary generalized Loop subdivision for chemical imaging. For other non-stationary surface subdivisions, see also [
8,
9,
10,
11] and references therein.
The above schemes can be seen as being obtained based on a fixed point iteration coming from the generation of exponential polynomials [
10] and thus can generate this kind of polynomial. In fact, besides this kind of non-stationary subdivision, there are also non-stationary subdivisions which are based on other kinds of iterations, such as those in [
12,
13]. Yet, such schemes are curve but not surface subdivisions. Zhang et al. [
10] presented the first surface subdivision from this point of view and derived a non-stationary Catmull–Clark subdivision with shape control. However, the obtained non-stationary Catmull–Clark subdivision lacks further analysis like the analysis of the limit positions of initial points.
Therefore, in this paper, we try to construct and analyze a new non-stationary surface subdivision, i.e., a symmetric non-stationary Loop subdivision [
14]. This new scheme can adjust the shape of the limit surface due to its free parameter. For such a scheme, we show that it is
convergent in the regular part of the mesh and has tangent plane continuity at the limit positions of extraordinary points. Thus, this new scheme can generate surfaces with different shapes from a simple initial mesh while keeping a satisfactory smoothness property. Such a non-stationary subdivision is obtained in a way similar to the non-stationary scheme in [
10]. Specifically speaking, with a suitably chosen iteration and a function of this iteration, we properly modify the Loop subdivision rules in the regular part of the mesh and design the subdivision rules in the neighborhoods of extraordinary points in order to obtain the desired symmetric non-stationary Loop subdivision. More interestingly, in the spirit of the push-back operation [
15], we also derive the limit positions of the initial points, which generalizes the existing result and can be used to interpolate the initial points with certain valence. Furthermore, we also present a non-uniform generalization which can locally adjust the shape of the limit surface and also derive the corresponding limit positions of the initial points. With such limit positions, this non-uniform generalization can be used to interpolate points with different valences.
Therefore, the contribution of this paper is as follows: (1) a non-stationary Loop subdivision with a non-uniform generalization is presented. Such schemes can adjust the shapes of the limit surfaces freely, which cannot be achieved using Loop subdivision [
14] or other stationary schemes; (2) compared with the existing non-stationary schemes, like the one in [
10], the limit positions of the initial points are derived in this paper, and these generalize the results from the stationary case [
16] to non-stationary and even non-uniform cases; (3) compared with the existing methods used to interpolate initial points, like [
17], the new schemes in this paper can interpolate initial points directly and do not require additional adjustment of the initial points, making them more efficient.
The rest of this paper is organized as follows.
Section 2 is devoted to the review of some basic knowledge about subdivision.
Section 3 is devoted to the construction of this symmetric non-stationary Loop subdivision and its analysis, including smoothness analysis and the derivation of the limit positions of the initial points.
Section 4 is devoted to local control discussion of the symmetric non-stationary Loop subdivision. In
Section 5, we discuss the interpolation of control points with different valences.
Section 6 concludes this paper.
2. Preliminaries
This section is devoted to some basic knowledge about subdivision, which is needed in the rest of this paper.
Given the initial data sequence
, we consider the binary non-stationary subdivision scheme in this paper as
where
is the
k-level subdivision operator, and the sequence
is the
k-level mask with finite support. We denote this scheme by
, and the corresponding
k-level symbol is the Laurent polynomial
.
In order to present the discussion of the smoothness of the new non-stationary Loop subdivision clearly, we need the following definitions and results.
Definition 1 ([
18])
. A non-stationary subdivision scheme with the k-level mask is said to be asymptotically similar to the stationary subdivision scheme with the mask , if the k-level mask and the mask have the same support U and satisfy Definition 2 ([
19])
. A non-stationary subdivision scheme with the k-level symbol is said to satisfy approximate sum rules of order ifwith and satisfy With the above two definitions, the smoothness of non-stationary subdivision in the regular portion of the mesh can be investigated using the results from the following.
Theorem 1 ([
18])
. Assume that the non-stationary subdivision scheme satisfies approximate sum rules of order and is asymptotically similar to a convergent stationary subdivision scheme who is -convergent. Then, the non-stationary scheme is -convergent. As for the smoothness of the non-stationary scheme near the extraordinary points, we recall the definition of asymptotic equivalence as follows:
Definition 3 ([
20])
. The schemes and are asymptotically equivalent ifwherewith Ω
being the set of extreme vertices of . Remark 1. If the condition in (1) is replaced bythen the two schemes and are asymptotically equivalent of order 1.
To discuss the smoothness of the non-stationary schemes, let denote the initial mesh of arbitrary topology and consist of and , which denote the neighborhood of a regular vertex and an extraordinary vertex, respectively. Then, with Definition 3, we can analyze the smoothness of the new non-stationary Loop subdivision scheme in the neighborhoods of extraordinary points using the following result.
Theorem 2 ([
7])
. Let be a non-stationary subdivision scheme whose action in is described by the matrix sequence . Moreover, let be a stationary subdivision scheme that in is identified by the matrix S. Assume that- (i)
is -convergent in with symbol containing the factor and convergent in ;
- (ii)
is defined in by the symbol , where each contains the factor ;
- (iii)
is asymptotically equivalent of order 1 to in ;
- (iv)
In , the matrices and S satisfy, for all , , where C is some finite positive constant and with being the subdominant eigenvalue of S, which is double and non-defective.
Then, the subdivision surface generated by is convergent in and produces tangent plane continuous surfaces at the limit positions of the extraordinary points.
3. The Symmetric Non-Stationary Loop Subdivision
In this section, we construct and analyze the new symmetric non-stationary Loop subdivision. To this purpose, we first give a brief review on the Loop subdivision.
3.1. Review of Loop Subdivision
Let
denote the Loop subdivision scheme. In fact, in the regular part of the mesh, the Loop subdivision
can be given in terms of the following symmetric mask (symmetric about the origin)
with the corresponding symbol
For the subdivision rules in the neighborhood of an extraordinary point of valence
n, by
we denote the vector that collects the points in the 1-ring neighborhood of such an extraordinary point. Then, the Loop subdivision scheme can be described by
[
21]. Here,
is the local subdivision matrix
where
and
is the
circulant matrix
with
,
,
,
.
As is known, the Loop subdivision scheme is convergent in the regular part of the mesh and convergent at the limit positions of extraordinary points.
3.2. Construction of the Symmetric Non-Stationary Loop Subdivision
Now, we present the construction of the new symmetric non-stationary Loop subdivision, which is denoted by .
Since we see the non-stationary subdivision
as one based on some iteration and a function of this iteration, we first give the function
with the fixed point
. The corresponding iteration process is
Let
be the function of this iteration. Then, in the regular part of the mesh, the new non-stationary Loop subdivision
can be characterized in terms of the following
k-level symmetric mask (symmetric about the origin)
with the corresponding
k-level symbol
For the subdivision rules in the neighborhood of an extraordinary point of valence
n, the corresponding local subdivision matrix
can be written down as
where
with
, and
is the
circulant matrix
with
. The corresponding stencils used to generate a ‘vertex’ point with valence
n and an ‘edge’ point are as shown in
Figure 1.
Note that, when , the stencil used for generating new ‘vertex’ points reduces to the one used in the regular part. When , we have for . Thus, the k-level symbol in (4) and the local subdivision matrix in (5) are actually the stationary counterparts in (2) and (3), respectively, meaning that the new scheme becomes the classical Loop subdivision . Thus, since , the scheme reduces to the Loop subdivision as . Since , for the k-level mask , we have with . The local subdivision matrix has the same property. In this way, for the new scheme , it can actually be seen as the Loop subdivision plus some perturbation.
3.3. Smoothness Analysis
For the smoothness of the scheme , we first analyze its smoothness in the regular part of the mesh and then near the extraordinary points.
In fact, based on the definitions and theorems in
Section 2, we can show the following result for the smoothness of the scheme
in the regular part of the mesh.
Theorem 3. The new symmetric non-stationary Loop subdivision is convergent in the regular part of the mesh.
Proof. Since , it can be seen that . Thus, the scheme is asymptotically similar to .
Now, we show that the scheme has approximate sum rules of order 3, and then, by Theorem 1, it is convergent, since the Loop subdivision is convergent in the regular part of the mesh.
Let
. Then, from the
k level symbol
in (4), it can be computed that for
,
For the iteration
, we have
where
, and
is independent of
k. Therefore, it can be computed that
Thus, by Definition 2, the scheme
has approximate sum rules of order 3, and it is
convergent in the regular part of mesh. □
As for the smoothness of the new scheme near an extraordinary point of valence n, we have the following result:
Theorem 4. The scheme is tangent plane continuous at the limit position of the extraordinary point of valence n.
Proof. We prove this result by verifying all the conditions in Theorem 2. The Loop subdivision scheme is convergent in the regular part of the mesh and convergent in the neighborhood of extraordinary points. The symbol contains . Thus, condition (i) is verified. The k-level symbol also contains , and thus, condition (ii) is verified.
Now, we verify condition (iii). In fact, following (6), it can be seen that there exists a constant
independent of
k such that
. Thus, it can be computed that
where
is a constant independent of
k. Then, we have
Thus,
is asymptotically equivalent to
of order 1 and condition (iii) is verified.
Now, we verify condition (iv) of Theorem 6. Let
Then, the local subdivision matrices
and
can be transformed into the block-circulant ones [
21],
For
,
, following the proof of Theorem
in [
10] and by (7), we can compute that
where
is a constant independent of
k. Thus, for
, there exists a constant
independent of
n and
k such that
Since the matrix
has a subdominant eigenvalue
with algebraic and geometric multiplicity 2, we have
, and thus, condition (iv) of Theorem 6 can be verified. Therefore,
is tangent plane continuous at the limit position of this extraordinary point. □
Figure 2 gives an example showing the surfaces obtained by the scheme
with different values of
from the initial mesh (left). From
Figure 2, we can see the change of the shape of the obtained surface with the change of
.
3.4. Limit Positions of Initial Points
Now, we derive the limit positions of initial points in the spirit of the push-back method [
10]. In fact, for the Loop subdivision
, the limit position of initial points is [
16]
where
. Next, we generalize this result to the non-stationary case by deriving the limit positions of initial points for the new scheme
. From this we obtain the following result:
Theorem 5. For the new scheme , the limit position of the initial point with 1-
ring neighborhood points , , iswhere Proof. In fact, following the subdivision rules of
, we can compute the distance between
and
as
where
.
For
, it can be computed that
In this way, we have
Therefore, the corresponding limit position is
where
. □
From Theorem 5, it can be seen that when , the corresponding limit position in (9) actually reduces to the one in (8).
4. Discussion on the Local Control
In this section, we provide a non-uniform version of the scheme to locally control the limit surface.
To achieve this, we use a method similar to the local control discussion in [
10]. To be more specific, we set different initial parameters
to different initial points and use the average of them
as the initial parameter for a new edge point generation. As for the correspondence of the points in the coarse mesh and the ones in the refined mesh, we use the iteration
for the parameters of new vertex points and new edge points. Then, we replace
with
and
with
in
Figure 1. In this way, we can achieve the desired non-uniform version of the scheme
, which is not symmetric.
For such a non-uniform scheme, we point out that when
, it still tends to the Loop subdivision
. The smoothness of this non-uniform scheme in the regular part of the mesh can be calculated as in [
10]. As for the smoothness near the extraordinary points, it can be seen that all the conditions of Theorem 2 are satisfied, and thus, it still has tangent plane continuity at the limit positions of extraordinary points.
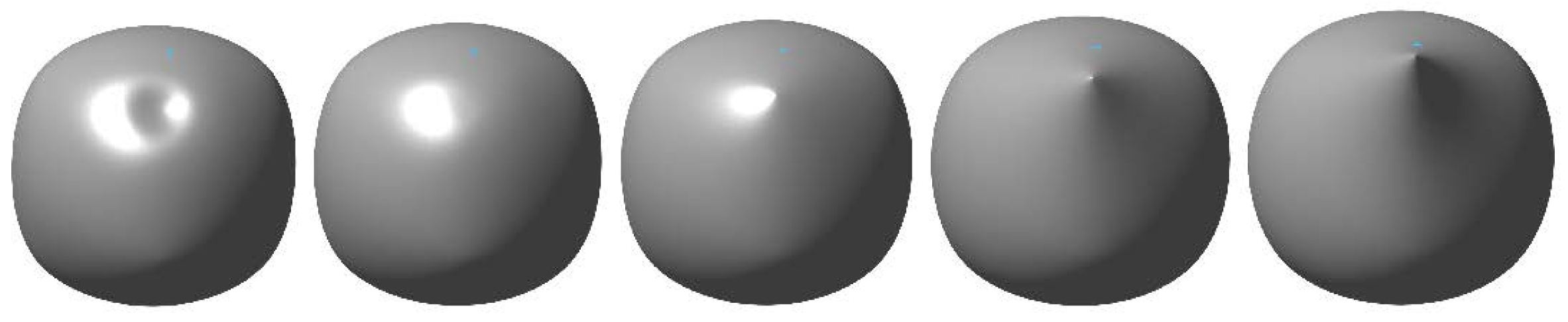
Figure 3 shows the surfaces generated by this new non-uniform scheme starting from the initial mesh in
Figure 4 (left) with different values of the parameter
corresponding to the point indexed by ∗ and 2, while others are the same. From
Figure 3, we can see the change of the limit surface with the change of
and find that the limit surface tends to generate a cusp as
increases.
5. Interpolation of Initial Points
Based on the analysis in
Section 3, we now move a further step to discuss the interpolation of initial points.
In connection with the initial points interpolation, several works have been conducted using approximating subdivision. For example, Sun and Lu [
17] presented a progressive interpolation, while Zheng and Cai [
22] proposed a two-phase subdivision to interpolate the initial mesh based on the Catmull–Clark subdivision. Other similar works can be found in [
23,
24] and the references therein.
Differently from these works, we use the limit position in (9) to interpolate initial control points. To do this, we just need to let the initial point equal its limit point , i.e., , so as to obtain the value of . Specifically, to interpolate an initial point with valence n from the limit position in (9), let when and when . Then, the corresponding value of in (10) is about .
As an example, we derive the surface crossing the initial points in the initial mesh in
Figure 2 (left). Note that any point of this initial mesh has a valence of 3, and thus, we set
.
Figure 5 shows the surface interpolating the initial mesh in
Figure 2 (left) using the new non-uniform subdivision.
Remark 2. We can also use the iteration coming from the generation of exponential polynomials, i.e., with , and obtain the corresponding limit position of initial points. However, the corresponding scheme cannot reach the initial points, as this requires λ in (10) to be 0, which is impossible for .
In fact, it can be seen that
in (10) depends on the valence
n. Thus, with a certain initial parameter, the subdivision
can only interpolate points with certain valence but not all of them when the initial points have different valences.
Figure 4 shows the surface (right) starting from the mesh (left) using
with
. From
Figure 4, it can be seen that the point indexed by ∗ and 1 with valence 5 cannot be interpolated.
Now, with the local control discussion, we provide a way to interpolate all the initial points. To achieve this, similar to Theorem 5, we first provide the corresponding limit positions of the initial points for this new non-uniform scheme as follows.
Theorem 6. With the non-uniform generalization of the scheme , the limit position of the initial point with 1-
ring neighborhood points , , iswith Proof. In fact, from the proof of Theorem 5, the distance between
and
can be written as
where
.
For
, it can be computed that
In this way, we have
Therefore, the corresponding limit position is
where
. □
As an example, we take the mesh with 8 points and 2 of them with valence 3, i.e., the one in
Figure 4 (left). According to Theorem 6, to interpolate the initial points, we need the corresponding initial parameters
(to the initial points with valence
) and
(to the initial points with valence
) to satisfy
Here,
, and
. It can be computed that, when
,
in (11) is about
.
Figure 6 shows the surface obtained by this new non-uniform scheme starting from the mesh in
Figure 4 (left). The initial parameters are set to be
for points with valence 3 and
for points with valence
. From
Figure 6, we can see that the limit surface indeed interpolates initial points with different valences.
In fact, compared with the existing methods to interpolate initial points, a non-stationary Loop subdivision with a non-uniform generalization is used directly to interpolate the initial points. Thus, the new method in this paper has all of the subdivision’s advantages, such as locality and efficiency. Therefore, this new method can be used to construct smooth interpolating surfaces with different shapes and can even be applied in fields like scientific visualization.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





