
A Modified Parallel Algorithm for a Common Fixed-Point Problem with Application to Signal Recovery
 ,
,  , and
, and
Abstract
:1. Introduction
2. Preliminaries
- (i)
- C is said to be dominated by v if for all ;
- (ii)
- C is said to dominate v if for all .
- (i)
- is edge-preserving, that is, for ,
- (i)
- non-increases weights of edges of G, that is, for ,
- (i)
- the sequence converges for all ;
- (ii)
- all weak sequential cluster points of belong to C.
3. Results
| Algorithm 1: Inertial Mann-type parallel algorithm (IMTPA) |
|
- (i)
- ;
- (ii)
- and dominate ϰ for all .
- (i)
- ;
- (ii)
- for all ;
- (iii)
- and dominate ϰ for all ;
- (iv)
- G is transitive and is dominated by ϰ for all .
- (i)
- ;
- (ii)
- for all ;
- (iii)
- and dominate ϰ for all ;
- (iv)
- for all .
3.1. Weak Convergence Theorem
- (i)
- ;
- (ii)
- for all ;
- (iii)
- and dominate ϰ for all ;
- (iv)
- G is transitive, and is dominated by ϰ for all ;
- (v)
- if there is a subsequence of , for some , then .
- (i)
- ;
- (ii)
- for all ;
- (iii)
- and dominate ϰ for all ;
- (iv)
- for all ;
- (v)
- if there is a subsequence of , , then .
- (i)
- ;
- (ii)
- for all .
3.2. Strong Convergence Theorem
- (i)
- ;
- (ii)
- and dominate ϰ for all ;
- (iii)
- for all ;
- (iv)
- G is transitive, and is dominated by ϰ for all ;
- (v)
- satisfies the condition , where is closed.
- (i)
- ;
- (ii)
- and dominate ϰ for all ;
- (iii)
- for all ;
- (iv)
- for all ;
- (v)
- satisfies the condition , where is closed.
- (i)
- ;
- (ii)
- for all ;
- (iii)
- satisfies the condition .
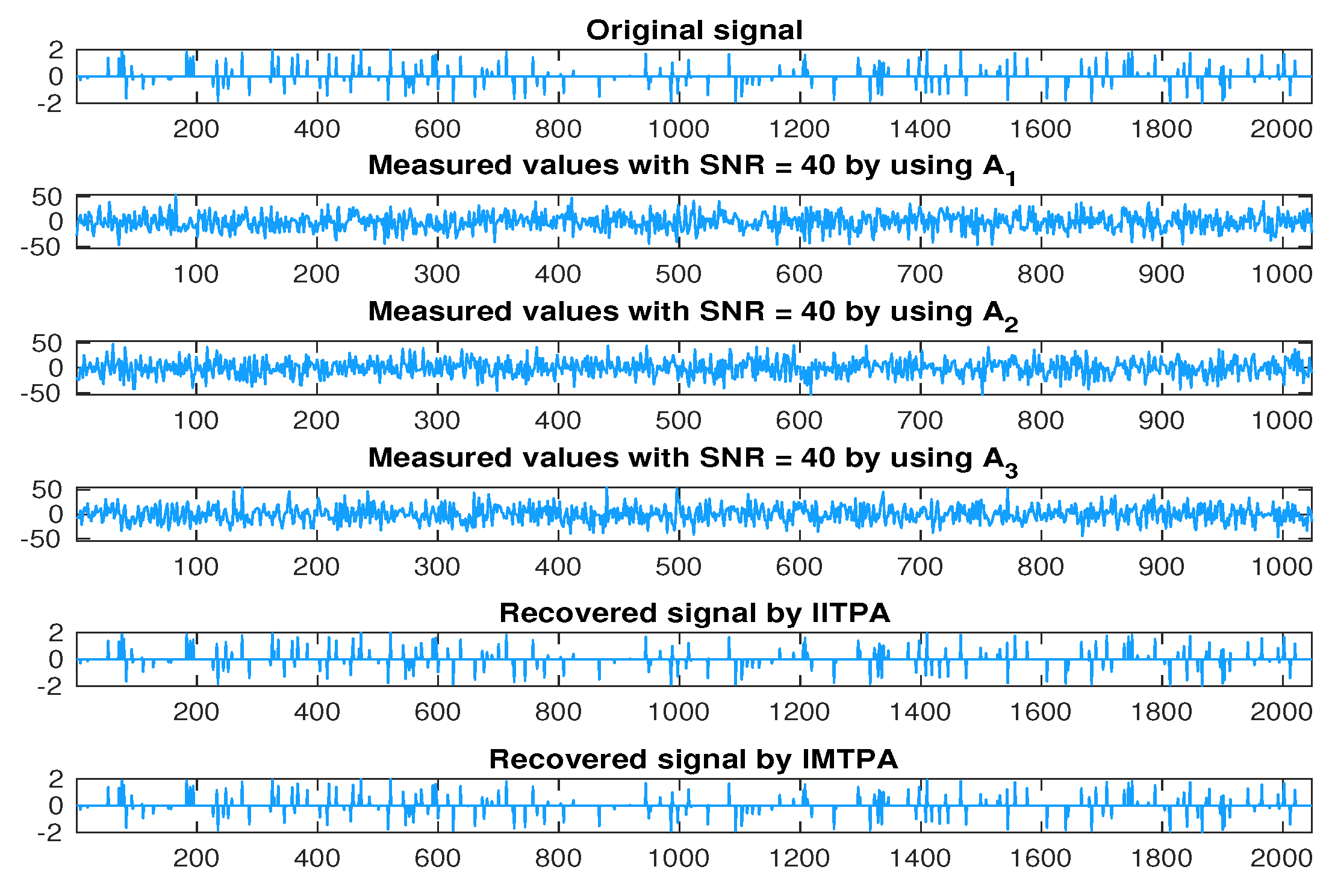
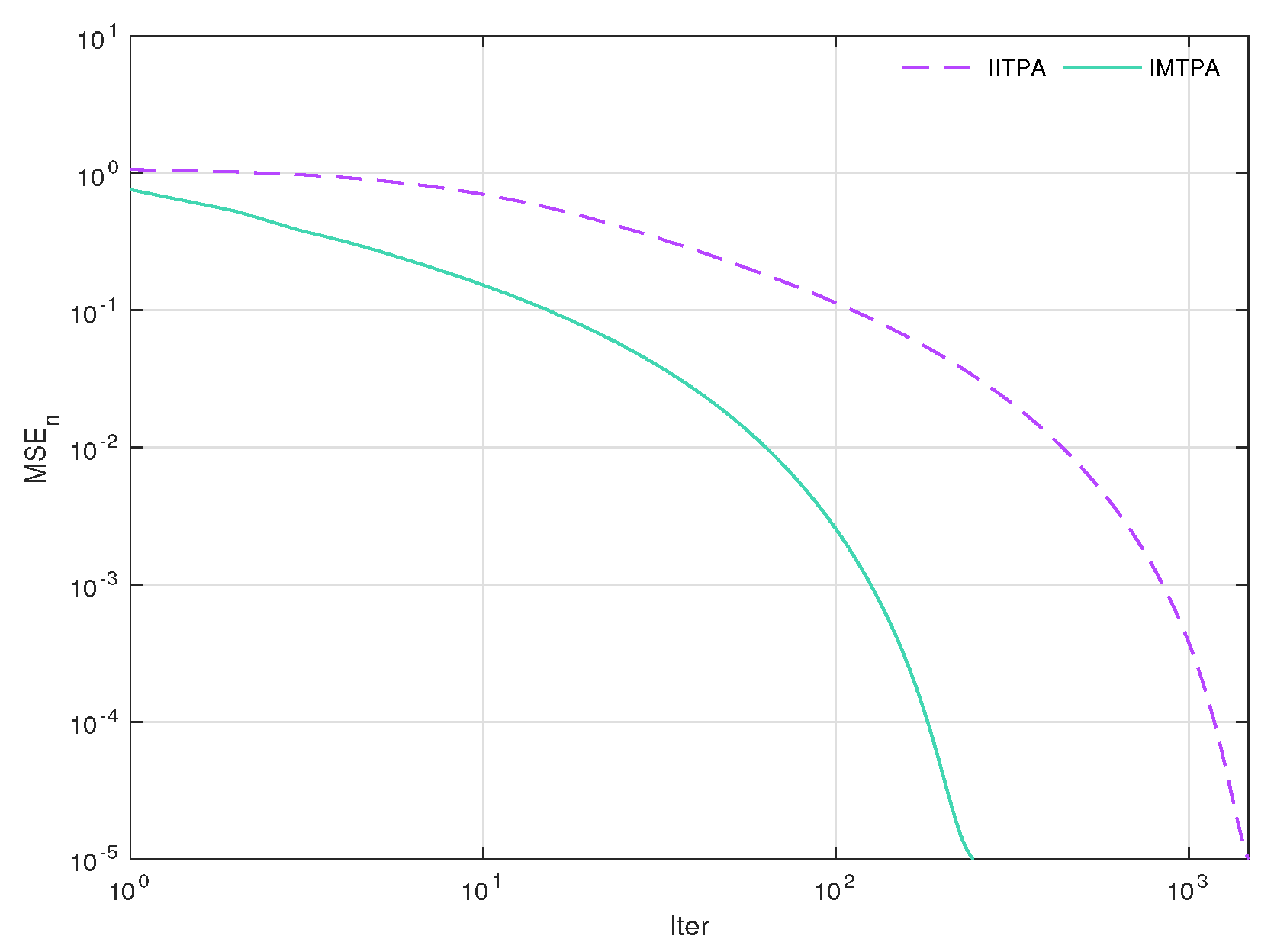
4. Application to Signal Recovery Problem
| Algorithm 2: Inertial Ishikawa-type parallel algorithm (IITPA) |
|
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tiammee, J.; Kaewkhao, A.; Suantai, S. On Browder’s convergence theorem and Halpern iteration process for G-nonexpansive mappings in Hilbert spaces endowed with graphs. Fixed Point Theory Appl. 2015, 2015, 187. [Google Scholar] [CrossRef] [Green Version]
- Tripak, O. Common fixed points of G-nonexpansive mappings on Banach spaces with a graph. Fixed Point Theory Appl. 2016, 2016, 87. [Google Scholar] [CrossRef] [Green Version]
- Sridarat, P.; Suparatulatorn, R.; Suantai, S.; Cho, Y.J. Convergence analysis of SP-iteration for G-nonexpansive mappings with directed graphs. Bull. Malays. Math. Sci. Soc. 2019, 42, 2361–2380. [Google Scholar] [CrossRef]
- Thianwan, T.; Yambangwai, D. Convergence analysis for a new two-step iteration process for G-nonexpansive mappings with directed graphs. J. Fixed Point Theory Appl. 2019, 21, 44. [Google Scholar] [CrossRef]
- Yambangwai, D.; Aunruean, S.; Thianwan, T. A new modified three-step iteration method for G-nonexpansive mappings in Banach spaces with a graph. Numer. Algorithms 2020, 84, 537–565. [Google Scholar] [CrossRef]
- Anh, P.K.; Hieu, D.V. Parallel and sequential hybrid methods for a finite family of asymptotically quasi ϕ-nonexpansive mappings. J. Appl. Math. Comput. 2015, 48, 241–263. [Google Scholar] [CrossRef]
- Anh, P.K.; Hieu, D.V. Parallel hybrid iterative methods for variational inequalities, equilibrium problems, and common fixed-point problems. Vietnam J. Math. 2016, 44, 351–374. [Google Scholar] [CrossRef]
- Charoensawan, P.; Yambangwai, D.; Cholamjiak, W.; Suparatulatorn, R. An inertial parallel algorithm for a finite family of G-nonexpansive mappings with application to the diffusion problem. Adv. Differ. Equ. 2021, 2021, 453. [Google Scholar] [CrossRef]
- Cholamjiak, W.; Khan, S.A.; Yambangwai, D.; Kazmi, K.R. Strong convergence analysis of common variational inclusion problems involving an inertial parallel monotone hybrid method for a novel application to image restoration. Rev. R. Acad. Cienc. Exactas Fís. Nat. Ser. A Mat. RACSAM 2020, 114, 99. [Google Scholar] [CrossRef]
- Cholamjiak, P.; Suantai, S.; Sunthrayuth, P. An explicit parallel algorithm for solving variational inclusion problem and fixed-point problem in Banach spaces. Banach J. Math. Anal. 2020, 14, 20–40. [Google Scholar] [CrossRef]
- Suantai, S.; Kankam, K.; Cholamjiak, P.; Cholamjiak, W. A parallel monotone hybrid algorithm for a finite family of G-nonexpansive mappings in Hilbert spaces endowed with a graph applicable in signal recovery. Comput. Appl. Math. 2021, 40, 145. [Google Scholar] [CrossRef]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef] [Green Version]
- Kitkuan, D.; Kumam, P.; Martínez-Moreno, J.; Sitthithakerngkiet, K. Inertial viscosity forward-backward splitting algorithm for monotone inclusions and its application to image restoration problems. Int. J. Comput. Math. 2020, 97, 482–497. [Google Scholar]
- Nesterov, Y. A method for solving the convex programming problem with convergence rate O(1/k2). Dokl. Akad. Nauk SSSR 1983, 269, 543–547. [Google Scholar]
- Auslender, A.; Teboulle, M.; Ben-Tiba, S. A logarithmic-quadratic proximal method for variational inequalities. Comput. Optim. Appl. 1999, 12, 31–40. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; CMS Books in Mathematics; Springer: New York, NY, USA, 2011. [Google Scholar]
- Suantai, S.; Donganont, M.; Cholamjiak, W. Hybrid methods for a countable family of G-nonexpansive mappings in Hilbert spaces endowed with graphs. Mathematics 2019, 7, 936. [Google Scholar] [CrossRef] [Green Version]
- Gibali, A.; Thong, D.V. Tseng type methods for solving inclusion problems and its applications. Calcolo 2018, 55, 49. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| k Nonzero Elements | |||||
|---|---|---|---|---|---|
| IITPA | No. of Iterations | 1290 | 1332 | 1383 | 1474 |
| CPU Time | 5.9837 | 6.5560 | 6.4376 | 6.5130 | |
| IMTPA | No. of Iterations | 203 | 205 | 218 | 245 |
| CPU Time | 0.8378 | 1.0953 | 0.9076 | 1.0110 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khemphet, A.; Suparatulatorn, R.; Varnakovida, P.; Charoensawan, P. A Modified Parallel Algorithm for a Common Fixed-Point Problem with Application to Signal Recovery. Symmetry 2023, 15, 1464. https://doi.org/10.3390/sym15071464
Khemphet A, Suparatulatorn R, Varnakovida P, Charoensawan P. A Modified Parallel Algorithm for a Common Fixed-Point Problem with Application to Signal Recovery. Symmetry. 2023; 15(7):1464. https://doi.org/10.3390/sym15071464
Chicago/Turabian StyleKhemphet, Anchalee, Raweerote Suparatulatorn, Pariwate Varnakovida, and Phakdi Charoensawan. 2023. "A Modified Parallel Algorithm for a Common Fixed-Point Problem with Application to Signal Recovery" Symmetry 15, no. 7: 1464. https://doi.org/10.3390/sym15071464