

Multi-Strategy Enhanced Dung Beetle Optimizer and Its Application in Three-Dimensional UAV Path Planning
Abstract
:1. Introduction
- Adding a reflective learning strategy and using Beta distribution function mapping to generate reflective solutions, improving the algorithm’s search ability;
- For particles that exceeded the search space range, Levy distribution mapping was used to handle particle boundaries, enhancing the probability of global search reaching the optimal position;
- Individual crossover mechanism and dimension crossover mechanism were used to update the position of individual thief beetles, increasing the population diversity and avoiding falling into local optima;
- Applying the improved MDBO to solve the three-dimensional UAV path-planning problem, and design sets of scene experiments to verify the efficiency of the MDBO.
2. Dung Beetle Optimizer (DBO)
- (1)
- Ball-rolling dung beetle
- (2)
- Brood ball
- (3)
- Small dung beetle
- (4)
- Thief
3. The Proposed Method
3.1. Dynamic Reflective Learning Strategy Based on Beta Distribution
3.2. Cross Boundary Limits Method Based on Levy Distribution
3.3. Cross Operators for Updating the Location of Thieves
- (1)
- Horizontal crossover search (HCS)
- (2)
- Vertical crossover search (VCS)
3.4. The Detailed Process of the MDBO
| Algorithm 1: The pseudo code of MDBO |
| Initialize the particle’s population N; the maximum iterations T; the dimensions D. |
| Initialize the positions of the dung beetles While t ≤ T do Calculate the current best position and its fitness Obtain N reflective solutions by Equations (11)–(15) Update the positions of N individuals For i = 1:N do if i == ball-rolling dung beetle then Generate a random number if p < 0.9 then Update search position by Equation (1) Else Update search position by Equation (3) end if if i == brood ball then Update search position by Equation (5) end if if i == small dung beetle then Update search position by Equation (7) end if if i == thief then Update search position by Equation (8) while t ≤ T/4 do Perform HCS using Equations (17)–(18) Perform VCS using Equation (19) end while end if end for Update the best position and its fitness t = t + 1 end while Return the optimal solution Xb and its fitness fb. |
3.5. Computational Complexity Analysis
4. Analysis of Simulation Experiments
4.1. Experimental Design
4.2. Sensitivity Analysis of MDBO’s Parameters
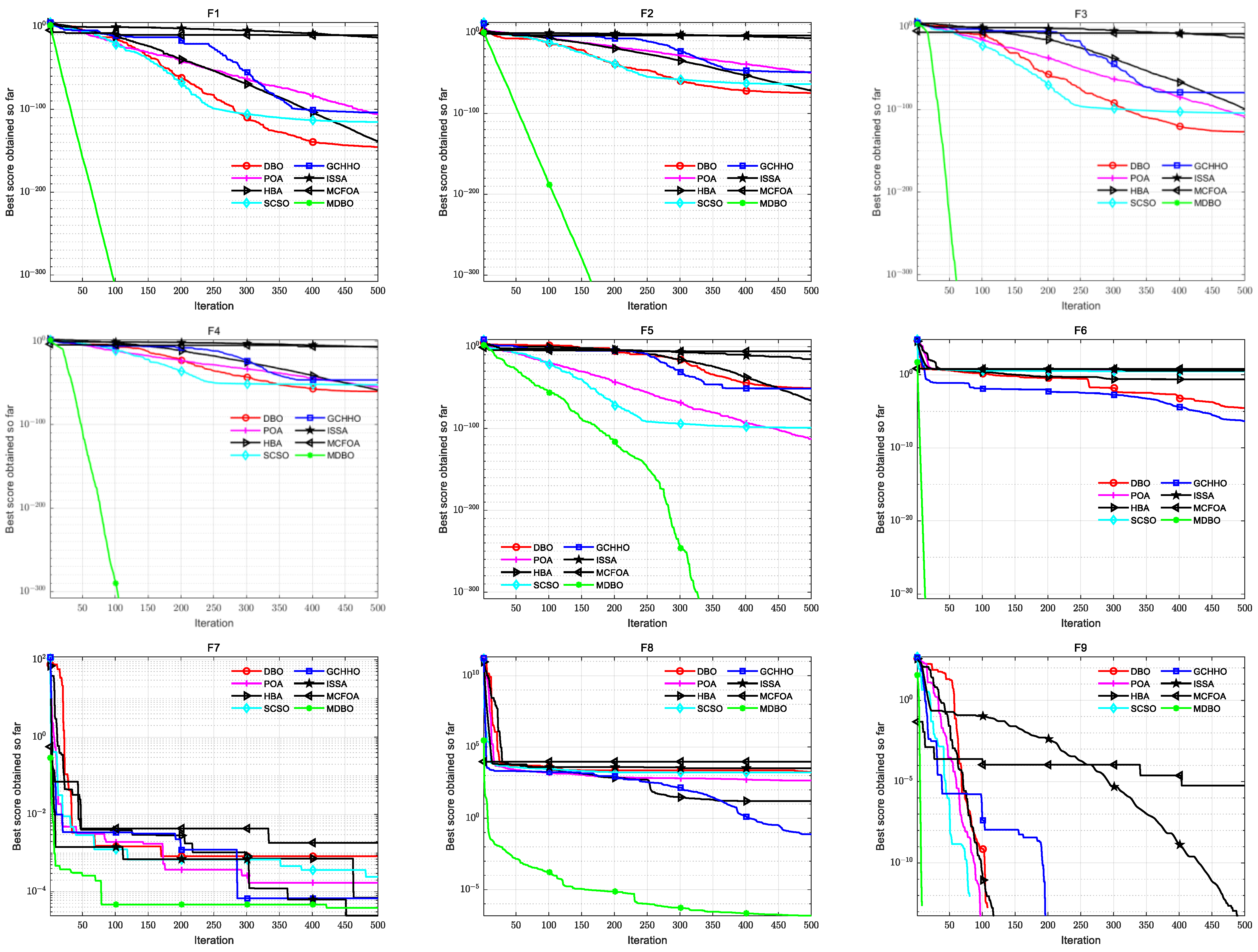
4.3. Comparison of Performance on 12 Benchmark Functions
4.4. Convergence Curve Analysis
4.5. Wilcoxon Rank-Sum Test
4.6. MDBO’s Performance on CEC2021 Suite
5. UAV Path-Planning Model
5.1. Environment Model
5.2. Path Representation
5.3. Cost Function and Performance Constraints
- (1)
- Length cost
- (2)
- Flight altitude cost
- (3)
- Smooth cost
6. Simulation Experiments and Discussions on UAV Path Planning
6.1. Scenario Setup
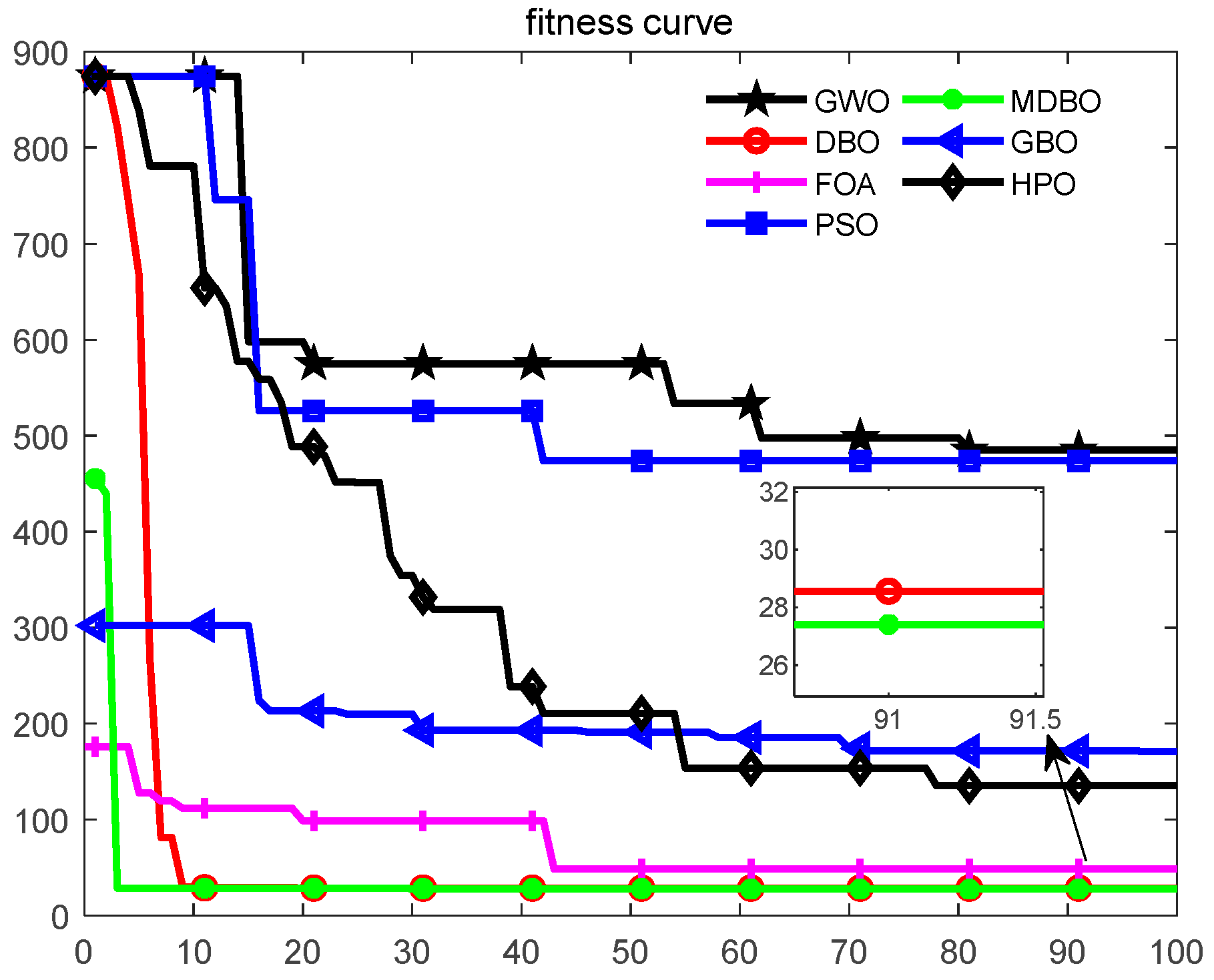
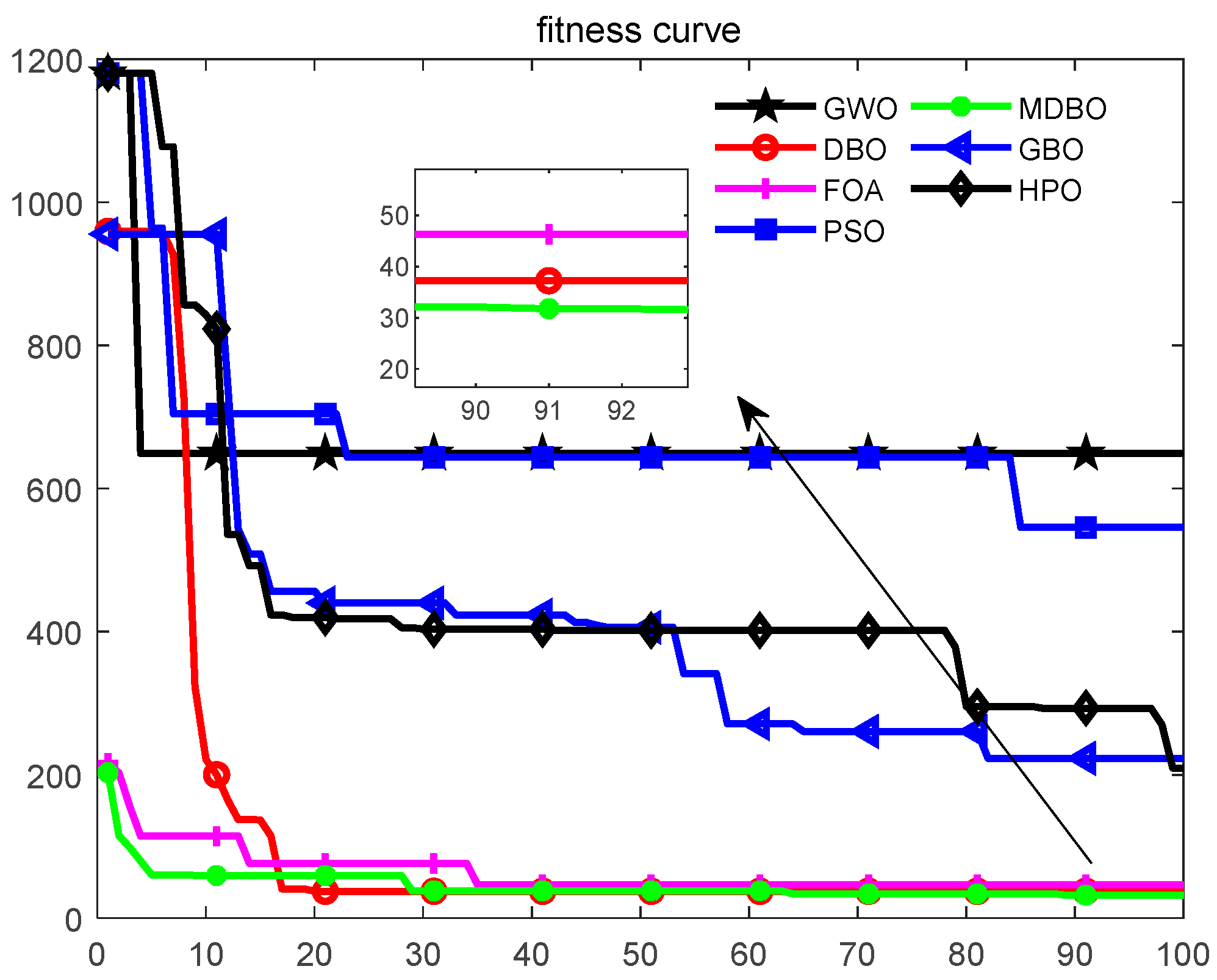
6.2. Effect of the Cost Function Parameters
6.3. Impact of the Count and Position of Tasks
6.4. Influence of the Number and Arrangement of Obstacles
7. Conclusions
8. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Function Name | Search Space | Dim | fmin |
|---|---|---|---|---|
| F1 | Sphere | [−100,100] | 30/50/100 | 0 |
| F2 | Schwefel 2.22 | [−10,10] | 30/50/100 | 0 |
| F3 | Schwefel 1.2 | [−100,100] | 30/50/100 | 0 |
| F4 | Schwefel 2.21 | [−100,100] | 30/50/100 | 0 |
| F5 | Zakharov | [−5,10] | 30/50/100 | 0 |
| F6 | Step | [−100,100] | 30/50/100 | 0 |
| F7 | Quartic | [−1.28,1.28] | 30/50/100 | 0 |
| F8 | Qing | [−500,500] | 30/50/100 | 0 |
| F9 | Rastrigin | [−5.12,5.12] | 30/50/100 | 0 |
| F10 | Ackley 1 | [−32,32] | 30/50/100 | 0 |
| F11 | Griewank | [−600,600] | 30/50/100 | 0 |
| F12 | Penalized 1 | [−50,50] | 30/50/100 | 0 |
| No. | Functions | Fi* | |
|---|---|---|---|
| Unimodal Function | CEC-1 | Shifted and Rotated Bent Cigar Function | 100 |
| Basic Functions | CEC-2 | Shifted and Rotated Schwefel’s Function | 1100 |
| CEC-3 | Shifted and Rotated Lunacek bi-Rastrigin Function | 700 | |
| CEC-4 | Expand Rosenbrock’s plus Griewangk’s Function | 1900 | |
| Hybrid Functions | CEC-5 | Hybrid Function 1 (N = 3) | 1700 |
| CEC-6 | Hybrid Function 2 (N = 4) | 1600 | |
| CEC-7 | Hybrid Function 3 (N = 5) | 2100 | |
| Composition Functions | CEC-8 | Composition Function 1 (N = 3) | 2200 |
| CEC-9 | Composition Function 2 (N = 4) | 2400 | |
| CEC-10 | Composition Function 3 (N = 5) | 2500 | |
| Search range: [−100,100]D | |||
| No. | X | Y | Z | L | W | H |
|---|---|---|---|---|---|---|
| 1 | 550 | 100 | 0 | 50 | 100 | 10 |
| 2 | 0 | 400 | 0 | 50 | 200 | 10 |
| 3 | 300 | 320 | 0 | 50 | 380 | 15 |
| 4 | 800 | 150 | 0 | 50 | 100 | 15 |
| 5 | 500 | 350 | 0 | 50 | 100 | 10 |
| 6 | 50 | 800 | 0 | 50 | 100 | 10 |
| No. | X | Y | Z | L | W | H |
|---|---|---|---|---|---|---|
| 1 | 40 | 100 | 0 | 100 | 150 | 5 |
| 2 | 450 | 350 | 0 | 50 | 100 | 10 |
| 3 | 850 | 100 | 0 | 100 | 100 | 20 |
| 4 | 0 | 400 | 0 | 50 | 200 | 10 |
| 5 | 100 | 400 | 0 | 50 | 200 | 10 |
| 6 | 260 | 430 | 0 | 100 | 180 | 15 |
| 7 | 600 | 320 | 0 | 50 | 380 | 15 |
| 8 | 800 | 500 | 0 | 50 | 100 | 15 |
| 9 | 430 | 650 | 0 | 50 | 100 | 10 |
| 10 | 20 | 900 | 0 | 50 | 100 | 10 |
| 11 | 500 | 800 | 0 | 50 | 100 | 10 |
| 12 | 450 | 200 | 0 | 50 | 100 | 10 |
| 13 | 750 | 200 | 0 | 50 | 100 | 10 |
| No. | X | Y | Z | L | W | H |
|---|---|---|---|---|---|---|
| 1 | 40 | 100 | 0 | 100 | 150 | 5 |
| 2 | 400 | 150 | 0 | 50 | 100 | 10 |
| 3 | 550 | 100 | 0 | 50 | 100 | 10 |
| 4 | 850 | 100 | 0 | 100 | 100 | 20 |
| 5 | 0 | 400 | 0 | 50 | 200 | 10 |
| 6 | 100 | 400 | 0 | 50 | 200 | 10 |
| 7 | 260 | 430 | 0 | 100 | 180 | 15 |
| 8 | 500 | 320 | 0 | 50 | 100 | 10 |
| 9 | 600 | 320 | 0 | 50 | 380 | 15 |
| 10 | 700 | 300 | 0 | 100 | 100 | 10 |
| 11 | 800 | 500 | 0 | 50 | 100 | 15 |
| 12 | 300 | 700 | 0 | 50 | 100 | 10 |
| 13 | 430 | 650 | 0 | 50 | 100 | 10 |
| 14 | 20 | 900 | 0 | 50 | 100 | 10 |
| 15 | 100 | 800 | 0 | 50 | 100 | 10 |
| 16 | 200 | 800 | 0 | 50 | 100 | 10 |
| 17 | 500 | 800 | 0 | 50 | 100 | 10 |
| 18 | 750 | 750 | 0 | 50 | 100 | 10 |
| 19 | 900 | 900 | 0 | 50 | 100 | 10 |
References
- Jordan, S.; Moore, J.; Hovet, S.; Box, J.; Perry, J.; Kirsche, K.; Lewis, D.; Tse, Z.T.H. State-of-the-art technologies for UAV inspections. IET Radar Sonar Navig. 2018, 12, 151–164. [Google Scholar] [CrossRef]
- Hu, H.; Xiong, K.; Qu, G.; Ni, Q.; Fan, P.; Ben Letaief, K. AoI-Minimal Trajectory Planning and Data Collection in UAV-Assisted Wireless Powered IoT Networks. IEEE Internet Things J. 2021, 8, 1211–1223. [Google Scholar] [CrossRef]
- Yu, X.; Li, C.; Yen, G.G. A knee-guided differential evolution algorithm for unmanned aerial vehicle path planning in disaster management. Appl. Soft Comput. 2020, 98, 106857. [Google Scholar] [CrossRef]
- Lin, L.; Goodrich, M.A. UAV intelligent path planning for Wilderness Search and Rescue. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 709–714. [Google Scholar] [CrossRef] [Green Version]
- Shin, Y.; Kim, E. Hybrid path planning using positioning risk and artificial potential fields. Aerosp. Sci. Technol. 2021, 112, 106640. [Google Scholar] [CrossRef]
- Huang, S.-K.; Wang, W.-J.; Sun, C.-H. A Path Planning Strategy for Multi-Robot Moving with Path-Priority Order Based on a Generalized Voronoi Diagram. Appl. Sci. 2021, 11, 9650. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Li, R.; Chen, H.; Chu, K. Trajectory planning for UAV navigation in dynamic environments with matrix alignment Dijkstra. Soft Comput. 2022, 26, 12599–12610. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, J.; Dai, J.; He, C. A Novel Real-Time Penetration Path Planning Algorithm for Stealth UAV in 3D Complex Dynamic Environment. IEEE Access 2020, 8, 122757–122771. [Google Scholar] [CrossRef]
- Lu, L.; Zong, C.; Lei, X.; Chen, B.; Zhao, P. Fixed-Wing UAV Path Planning in a Dynamic Environment via Dynamic RRT Algorithm. Mech. Mach. Sci. 2017, 408, 271–282. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, Z.; Qin, F.; Zhang, X.; Yao, H. A residual convolutional neural network based approach for real-time path planning. Knowl.-Based Syst. 2022, 242, 108400. [Google Scholar] [CrossRef]
- Chai, X.; Zheng, Z.; Xiao, J.; Yan, L.; Qu, B.; Wen, P.; Wang, H.; Zhou, Y.; Sun, H. Multi-strategy fusion differential evolution algorithm for UAV path planning in complex environment. Aerosp. Sci. Technol. 2021, 121, 107287. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V.; Pehlivanoglu, P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Ali, Z.A.; Han, Z.; Hang, W.B. Cooperative Path Planning of Multiple UAVs by using Max–Min Ant Colony Optimization along with Cauchy Mutant Operator. Fluct. Noise Lett. 2021, 20, 2150002. [Google Scholar] [CrossRef]
- Yu, X.; Li, C.; Zhou, J. A constrained differential evolution algorithm to solve UAV path planning in disaster scenarios. Knowl.-Based Syst. 2020, 204, 106209. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, X.; Jia, S.; Li, X. A novel phase angle-encoded fruit fly optimization algorithm with mutation adaptation mechanism applied to UAV path planning. Appl. Soft Comput. 2018, 70, 371–388. [Google Scholar] [CrossRef]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2022, 79, 7305–7336. [Google Scholar] [CrossRef]
- Peres, F.; Castelli, M. Combinatorial Optimization Problems and Metaheuristics: Review, Challenges, Design, and Development. Appl. Sci. 2021, 11, 6449. [Google Scholar] [CrossRef]
- Jain, G.; Yadav, G.; Prakash, D.; Shukla, A.; Tiwari, R. MVO-based path planning scheme with coordination of UAVs in 3-D environment. J. Comput. Sci. 2019, 37, 101016. [Google Scholar] [CrossRef]
- Li, K.; Ge, F.; Han, Y.; Wang, Y.A.; Xu, W. Path planning of multiple UAVs with online changing tasks by an ORPFOA algorithm. Eng. Appl. Artif. Intell. 2020, 94, 103807. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Y.; Yu, C.; Heidari, A.A.; Li, S.; Chen, H.; Li, C. Gaussian mutational chaotic fruit fly-built optimization and feature selection. Expert Syst. Appl. 2020, 141, 112976. [Google Scholar] [CrossRef]
- Song, S.; Wang, P.; Heidari, A.A.; Wang, M.; Zhao, X.; Chen, H.; He, W.; Xu, S. Dimension decided Harris hawks optimization with Gaussian mutation: Balance analysis and diversity patterns. Knowl.-Based Syst. 2021, 215, 106425. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A novel Random Walk Grey Wolf Optimizer. Swarm Evol. Comput. 2019, 44, 101–112. [Google Scholar] [CrossRef]
- Pichai, S.; Sunat, K.; Chiewchanwattana, S. An Asymmetric Chaotic Competitive Swarm Optimization Algorithm for Feature Selection in High-Dimensional Data. Symmetry 2020, 12, 1782. [Google Scholar] [CrossRef]
- Mikhalev, A.S.; Tynchenko, V.S.; Nelyub, V.A.; Lugovaya, N.M.; Baranov, V.A.; Kukartsev, V.V.; Sergienko, R.B.; Kurashkin, S.O. The Orb-Weaving Spider Algorithm for Training of Recurrent Neural Networks. Symmetry 2022, 14, 2036. [Google Scholar] [CrossRef]
- Almotairi, K.H.; Abualigah, L. Hybrid Reptile Search Algorithm and Remora Optimization Algorithm for Optimization Tasks and Data Clustering. Symmetry 2022, 14, 458. [Google Scholar] [CrossRef]
- Meng, A.-B.; Chen, Y.-C.; Yin, H.; Chen, S.-Z. Crisscross optimization algorithm and its application. Knowl.-Based Syst. 2014, 67, 218–229. [Google Scholar] [CrossRef]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary programming made faster. IEEE Trans. Evol. Comput. 1999, 3, 82–102. [Google Scholar] [CrossRef] [Green Version]
- Cai, L.; Qu, S.; Cheng, G. Two-archive method for aggregation-based many-objective optimization. Inf. Sci. 2018, 422, 305–317. [Google Scholar] [CrossRef]
- Mohammadi-Balani, A.; Nayeri, M.D.; Azar, A.; Taghizadeh-Yazdi, M. Golden eagle optimizer: A nature-inspired metaheuristic algorithm. Comput. Ind. Eng. 2021, 152, 107050. [Google Scholar] [CrossRef]
- Mohamed, A.W.; Sallam, K.M.; Agrawal, P.; Hadi, A.A.; Mohamed, A.K. Evaluating the performance of meta-heuristic algorithms on CEC 2021 benchmark problems. Neural Comput. Appl. 2023, 35, 1493–1517. [Google Scholar] [CrossRef]
- Trojovský, P.; Dehghani, M. Pelican Optimization Algorithm: A Novel Nature-Inspired Algorithm for Engineering Applications. Sensors 2022, 22, 855. [Google Scholar] [CrossRef] [PubMed]
- Seyyedabbasi, A.; Kiani, F. Sand Cat swarm optimization: A nature-inspired algorithm to solve global optimization problems. Eng. Comput. 2022, 1–25. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Hussain, K.; Mabrouk, M.S.; Al-Atabany, W. Honey Badger Algorithm: New metaheuristic algorithm for solving optimization problems. Math. Comput. Simul. 2022, 192, 84–110. [Google Scholar] [CrossRef]
- Hegazy, A.E.; Makhlouf, M.A.; El-Tawel, G.S. Improved salp swarm algorithm for feature selection. J. King Saud Univ.—Comput. Inf. Sci. 2020, 32, 335–344. [Google Scholar] [CrossRef]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Pan, W.-T. A new Fruit Fly Optimization Algorithm: Taking the financial distress model as an example. Knowl. Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Bozorg-Haddad, O.; Chu, X. Gradient-based optimizer: A new metaheuristic optimization algorithm. Inf. Sci. 2020, 540, 131–159. [Google Scholar] [CrossRef]
- Naruei, I.; Keynia, F.; Molahosseini, A.S. Hunter–prey optimization: Algorithm and applications. Soft Comput. 2022, 26, 1279–1314. [Google Scholar] [CrossRef]












| Algorithm | Parameters |
|---|---|
| MDBO | k = 0.1, b = 0.3, α = β = 0.5 |
| POA | I = 1 or 2, R = 0.2 |
| SCSO | S = 2 |
| HBA | β = 6, C = 2 |
| DBO | k = 0.1, b = 0.3 |
| ISSA | w = 0.7 |
| MCFOA | M = 4, c1∈(0,1) |
| GCHHO | E0∈[−1,1], θ = 0 |
| Fun No. | Name | 30 dim | 50 dim | 100 dim | |||
|---|---|---|---|---|---|---|---|
| Mean | Std | Mean | Std | Mean | Std | ||
| F1 | DBO | 7.74 × 10−114 | 3.88 × 10−113 | 3.93 × 10−97 | 2.15 × 10−96 | 1.07 × 10−111 | 5.84 × 10−111 |
| POA | 8.32 × 10−103 | 4.44 × 10−102 | 1.64 × 10−99 | 8.31 × 10−99 | 9.87 × 10−100 | 5.39 × 10−99 | |
| HBA | 2.58 × 10−134 | 1.39 × 10−133 | 1.56 × 10−128 | 6.28 × 10−128 | 7.48 × 10−122 | 2.34 × 10−121 | |
| SCSO | 9.44 × 10−111 | 4.99 × 10−110 | 2.70 × 10−109 | 1.22 × 10−108 | 1.44 × 10−103 | 5.79 × 10−103 | |
| GCHHO | 2.28 × 10−91 | 8.84 × 10−91 | 3.95 × 10−92 | 2.16 × 10−91 | 2.28 × 10−94 | 1.15 × 10−93 | |
| ISSA | 4.45 × 10−14 | 1.08 × 10−14 | 7.07 × 10−14 | 1.46 × 10−14 | 1.40 × 10−13 | 1.77 × 10−14 | |
| MCFOA | 6.53 × 10−11 | 1.14 × 10−10 | 1.90 × 10−10 | 3.69 × 10−10 | 7.94 × 10−10 | 1.22 × 10−9 | |
| MDBO | 0 | 0 | 0 | 0 | 0 | 0 | |
| F2 | DBO | 9.65 × 10−57 | 5.28 × 10−56 | 3.97 × 10−57 | 2.18 × 10−56 | 5.75 × 10−59 | 2.40 × 10−58 |
| POA | 1.11 × 10−49 | 6.05 × 10−49 | 1.92 × 10−51 | 8.90 × 10−51 | 4.73 × 10−51 | 1.71 × 10−50 | |
| HBA | 7.02 × 10−72 | 3.11 × 10−71 | 2.61 × 10−69 | 5.42 × 10−69 | 8.24 × 10−65 | 2.58 × 10−64 | |
| SCSO | 3.31 × 10−60 | 1.13 × 10−59 | 6.72 × 10−59 | 1.24 × 10−58 | 5.81 × 10−55 | 2.40 × 10−54 | |
| GCHHO | 2.03 × 10−47 | 1.11 × 10−46 | 3.83 × 10−49 | 1.65 × 10−48 | 6.52 × 10−48 | 2.78 × 10−47 | |
| ISSA | 8.83 × 10−8 | 1.34 × 10−8 | 1.46 × 10−7 | 1.64 × 10−8 | 2.97 × 10−7 | 2.15 × 10−8 | |
| MCFOA | 3.16 × 10−4 | 2.91 × 10−4 | 5.40 × 10−4 | 4.63 × 10−4 | 1.22 × 10−3 | 1.19 × 10−3 | |
| MDBO | 0 | 0 | 0 | 0 | 0 | 0 | |
| F3 | DBO | 2.70 × 10−29 | 1.48 × 10−28 | 1.93 × 10−39 | 1.06 × 10−38 | 4.75 × 10−11 | 2.60 × 10−10 |
| POA | 6.02 × 10−99 | 3.30 × 10−98 | 3.62 × 10−100 | 1.81 × 10−99 | 6.01 × 10−98 | 2.24 × 10−97 | |
| HBA | 7.39 × 10−96 | 3.12 × 10−95 | 4.41 × 10−87 | 2.36 × 10−86 | 4.22 × 10−74 | 2.29 × 10−73 | |
| SCSO | 8.22 × 10−99 | 2.38 × 10−98 | 2.65 × 10−94 | 7.68 × 10−94 | 5.04 × 10−89 | 2.20 × 10−88 | |
| GCHHO | 6.90 × 10−58 | 3.35 × 10−57 | 6.52 × 10−49 | 3.55 × 10−48 | 7.71 × 10−38 | 4.22 × 10−37 | |
| ISSA | 4.81 × 10−13 | 5.24 × 10−13 | 1.16 × 10−12 | 1.47 × 10−12 | 4.20 × 10−12 | 3.91 × 10−12 | |
| MCFOA | 1.62 × 10−8 | 2.07 × 10−8 | 9.54 × 10−8 | 1.32 × 10−7 | 5.32 × 10−7 | 8.46 × 10−7 | |
| MDBO | 0 | 0 | 0 | 0 | 0 | 0 | |
| F4 | DBO | 7.33 × 10−58 | 3.94 × 10−57 | 2.15 × 10−50 | 1.18 × 10−49 | 6.11 × 10−50 | 1.86 × 10−49 |
| POA | 5.98 × 10−52 | 2.82 × 10−51 | 1.61 × 10−51 | 7.11 × 10−51 | 6.17 × 10−50 | 2.84 × 10−49 | |
| HBA | 1.53 × 10−56 | 7.64 × 10−56 | 7.69 × 10−50 | 1.86 × 10−49 | 4.23 × 10−39 | 1.71 × 10−38 | |
| SCSO | 3.79 × 10−51 | 1.45 × 10−50 | 4.92 × 10−49 | 1.58 × 10−48 | 1.24 × 10−47 | 5.76 × 10−47 | |
| GCHHO | 1.60 × 10−46 | 7.28 × 10−46 | 8.34 × 10−45 | 3.60 × 10−44 | 6.73 × 10−45 | 2.56 × 10−44 | |
| ISSA | 8.34 × 10−8 | 1.33 × 10−8 | 9.09 × 10−8 | 1.47 × 10−8 | 1.02 × 10−7 | 9.84 × 10−9 | |
| MCFOA | 3.17 × 10−6 | 3.01 × 10−6 | 6.04 × 10−6 | 7.66 × 10−6 | 8.58 × 10−6 | 6.83 × 10−6 | |
| MDBO | 0 | 0 | 0 | 0 | 0 | 0 | |
| F5 | DBO | 3.13 × 10−23 | 1.70 × 10−22 | 8.97 × 10−2 | 4.91 × 10−1 | 4.91 × 101 | 1.74 × 102 |
| POA | 6.38 × 10−103 | 3.49 × 10−102 | 2.68 × 10−103 | 1.44 × 10−102 | 3.59 × 10−97 | 1.97 × 10−96 | |
| HBA | 8.52 × 10−61 | 3.29 × 10−60 | 1.33 × 10−24 | 7.27 × 10−24 | 3.42 × 10−4 | 1.52 × 10−3 | |
| SCSO | 1.67 × 10−92 | 6.08 × 10−92 | 1.05 × 10−86 | 5.00 × 10−86 | 1.09 × 10−72 | 5.90 × 10−72 | |
| GCHHO | 1.26 × 10−33 | 6.88 × 10−33 | 5.00 × 10−29 | 2.69 × 10−28 | 1.92 × 10−5 | 1.05 × 10−4 | |
| ISSA | 5.35 × 10−15 | 1.64 × 10−14 | 1.32 × 10−14 | 3.03 × 10−14 | 4.18 × 10−14 | 1.10 × 10−13 | |
| MCFOA | 9.13 × 10−6 | 1.01 × 10−5 | 8.72 × 10−5 | 9.45 × 10−5 | 1.09 × 10−3 | 1.71 × 10−3 | |
| MDBO | 0 | 0 | 0 | 0 | 0 | 0 | |
| F6 | DBO | 9.15 × 10−3 | 4.53 × 10−2 | 2.97 × 10−1 | 2.69 × 10−1 | 4.68 × 100 | 7.99 × 10−1 |
| POA | 2.78 × 100 | 5.92 × 10−1 | 5.59 × 100 | 8.21 × 10−1 | 1.46 × 101 | 1.08 × 100 | |
| HBA | 8.62 × 10−3 | 4.56 × 10−2 | 8.89 × 10−1 | 3.71 × 10−1 | 8.27 × 100 | 9.39 × 10−1 | |
| SCSO | 2.06 × 100 | 5.98 × 10−1 | 4.93 × 100 | 7.74 × 10−1 | 1.43 × 101 | 1.34 × 100 | |
| GCHHO | 7.08 × 10−7 | 6.46 × 10−7 | 1.65 × 10−5 | 1.12 × 10−5 | 2.50 × 10−4 | 1.61 × 10−4 | |
| ISSA | 3.03 × 100 | 4.35 × 10−1 | 7.19 × 100 | 6.75 × 10−1 | 1.87 × 101 | 8.98 × 10−1 | |
| MCFOA | 6.75 × 100 | 9.29 × 10−2 | 1.12 × 101 | 1.66 × 10−1 | 2.26 × 101 | 2.59 × 10−1 | |
| MDBO | 0 | 0 | 0 | 0 | 0 | 0 | |
| F7 | DBO | 1.04 × 10−3 | 6.94 × 10−4 | 1.21 × 10−3 | 1.01 × 10−3 | 1.59 × 10−3 | 1.02 × 10−3 |
| POA | 2.26 × 10−4 | 1.62 × 10−4 | 1.97 × 10−4 | 1.42 × 10−4 | 1.56 × 10−4 | 8.67 × 10−5 | |
| HBA | 3.02 × 10−4 | 1.99 × 10−4 | 3.91 × 10−4 | 3.25 × 10−4 | 5.31 × 10−4 | 4.21 × 10−4 | |
| SCSO | 8.98 × 10−5 | 8.64 × 10−5 | 1.79 × 10−4 | 3.71 × 10−4 | 2.29 × 10−4 | 2.99 × 10−4 | |
| GCHHO | 2.90 × 10−4 | 2.73 × 10−4 | 2.49 × 10−4 | 2.28 × 10−4 | 4.19 × 10−4 | 3.78 × 10−4 | |
| ISSA | 9.43 × 10−5 | 7.38 × 10−5 | 1.08 × 10−4 | 9.09 × 10−5 | 1.04 × 10−4 | 1.46 × 10−4 | |
| MCFOA | 2.15 × 10−3 | 1.54 × 10−3 | 2.61 × 10−3 | 2.80 × 10−3 | 3.73 × 10−3 | 3.52 × 10−3 | |
| MDBO | 2.81 × 10−5 | 2.13 × 10−5 | 3.04 × 10−5 | 2.18 × 10−5 | 3.50 × 10−5 | 2.40 × 10−5 | |
| F8 | DBO | 2.85 × 101 | 1.02 × 102 | 3.44 × 103 | 3.74 × 103 | 8.97 × 104 | 2.61 × 104 |
| POA | 8.65 × 102 | 4.93 × 102 | 6.20 × 103 | 1.63 × 103 | 8.63 × 104 | 1.57 × 104 | |
| HBA | 2.84 × 102 | 3.21 × 102 | 5.67 × 103 | 2.29 × 103 | 1.16 × 105 | 2.35 × 104 | |
| SCSO | 2.17 × 103 | 1.05 × 103 | 1.19 × 104 | 3.20 × 103 | 1.41 × 105 | 3.39 × 104 | |
| GCHHO | 1.74 × 100 | 4.61 × 100 | 2.61 × 101 | 2.57 × 101 | 1.87 × 103 | 5.35 × 102 | |
| ISSA | 3.18 × 103 | 4.46 × 102 | 1.80 × 104 | 1.19 × 103 | 1.73 × 105 | 1.05 × 104 | |
| MCFOA | 9.36 × 103 | 1.59 × 102 | 4.27 × 104 | 2.68 × 102 | 3.37 × 105 | 1.79 × 103 | |
| MDBO | 2.29 × 10−7 | 1.99 × 10−7 | 1.29 × 10−5 | 1.07 × 10−5 | 3.07 × 10−3 | 4.26 × 10−3 | |
| F9 | DBO | 9.96 × 10−2 | 5.45 × 10−1 | 0 | 0 | 2.32 × 100 | 1.27 × 101 |
| POA | 0 | 0 | 0 | 0 | 0 | 0 | |
| HBA | 0 | 0 | 0 | 0 | 0 | 0 | |
| SCSO | 0 | 0 | 0 | 0 | 0 | 0 | |
| GCHHO | 0 | 0 | 0 | 0 | 0 | 0 | |
| ISSA | 0 | 0 | 0 | 0 | 0 | 0 | |
| MCFOA | 4.68 × 10−6 | 8.78 × 10−6 | 8.24 × 10−6 | 1.61 × 10−5 | 2.47 × 10−5 | 3.87 × 10−5 | |
| MDBO | 0 | 0 | 0 | 0 | 0 | 0 | |
| F10 | DBO | 1.01 × 10−15 | 6.49 × 10−16 | 8.88 × 10−16 | 0 | 1.01 × 10−15 | 6.49 × 10−16 |
| POA | 3.61 × 10−15 | 1.53 × 10−15 | 3.97 × 10−15 | 1.23 × 10−15 | 3.85 × 10−15 | 1.35 × 10−15 | |
| HBA | 6.64 × 10−1 | 3.64 × 100 | 2.66 × 100 | 6.89 × 100 | 3.32 × 100 | 7.55 × 100 | |
| SCSO | 8.88 × 10−16 | 0 | 8.88 × 10−16 | 0 | 8.88 × 10−16 | 0 | |
| GCHHO | 8.88 × 10−16 | 0 | 8.88 × 10−16 | 0 | 8.88 × 10−16 | 0 | |
| ISSA | 4.84 × 10−8 | 4.18 × 10−9 | 4.69 × 10−8 | 3.79 × 10−9 | 4.75 × 10−8 | 2.78 × 10−9 | |
| MCFOA | 1.74 × 10−5 | 1.45 × 10−5 | 1.74 × 10−5 | 1.88 × 10−5 | 1.50 × 10−5 | 1.58 × 10−5 | |
| MDBO | 8.88 × 10−16 | 0 | 8.88 × 10−16 | 0 | 8.88 × 10−16 | 0 | |
| F11 | DBO | 1.80 × 10−3 | 9.87 × 10−3 | 0 | 0 | 0 | 0 |
| POA | 0 | 0 | 0 | 0 | 0 | 0 | |
| HBA | 0 | 0 | 0 | 0 | 0 | 0 | |
| SCSO | 0 | 0 | 0 | 0 | 0 | 0 | |
| GCHHO | 0 | 0 | 0 | 0 | 0 | 0 | |
| ISSA | 9.89 × 10−14 | 4.25 × 10−14 | 1.01 × 10−13 | 4.09 × 10−14 | 1.24 × 10−13 | 3.34 × 10−14 | |
| MCFOA | 1.74 × 10−13 | 3.89 × 10−13 | 1.74 × 10−13 | 3.92 × 10−13 | 2.69 × 10−13 | 4.75 × 10−13 | |
| MDBO | 0 | 0 | 0 | 0 | 0 | 0 | |
| F12 | DBO | 5.13 × 10−4 | 1.64 × 10−3 | 4.77 × 10−3 | 6.03 × 10−3 | 6.45 × 10−2 | 2.34 × 10−2 |
| POA | 1.61 × 10−1 | 8.04 × 10−2 | 2.81 × 10−1 | 8.59 × 10−2 | 4.74 × 10−1 | 8.76 × 10−2 | |
| HBA | 4.44 × 10−4 | 1.64 × 10−3 | 1.88 × 10−2 | 8.56 × 10−3 | 1.43 × 10−1 | 5.33 × 10−2 | |
| SCSO | 9.95 × 10−2 | 4.05 × 10−2 | 2.06 × 10−1 | 5.90 × 10−2 | 3.77 × 10−1 | 7.31 × 10−2 | |
| GCHHO | 1.34 × 10−7 | 1.49 × 10−7 | 5.88 × 10−7 | 6.09 × 10−7 | 1.66 × 10−6 | 1.10 × 10−6 | |
| ISSA | 2.35 × 10−1 | 4.33 × 10−2 | 4.13 × 10−1 | 6.52 × 10−2 | 6.38 × 10−1 | 6.17 × 10−2 | |
| MCFOA | 1.33 × 100 | 1.81 × 10−1 | 1.23 × 100 | 7.90 × 10−2 | 1.13 × 100 | 2.51 × 10−2 | |
| MDBO | 1.57 × 10−32 | 5.57 × 10−48 | 9.42 × 10−33 | 2.78 × 10−48 | 4.71 × 10−33 | 1.39 × 10−48 | |
| Fun No. | DBO | POA | HBA | SCSO | GCHHO | ISSA | MCFOA |
|---|---|---|---|---|---|---|---|
| p Value R | p Value R | p Value R | p Value R | p Value R | p Value R | p Value R | |
| F1 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 |
| F2 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 |
| F3 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 |
| F4 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 |
| F5 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 |
| F6 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 |
| F7 | 3.02 × 10−11 | 4.08 × 10−11 | 5.07 × 10−10 | 8.88 × 10−6 | 2.83 × 10−8 | 6.55 × 10−4 | 3.34 × 10−11 |
| F8 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 |
| F9 | 8.15 × 10−2 | NaN | NaN | NaN | NaN | NaN | 1.21 × 10−12 |
| F10 | NaN | 8.99 × 10−11 | 1.61 × 10−1 | NaN | NaN | 1.21 × 10−12 | 1.21 × 10−12 |
| F11 | NaN | NaN | NaN | NaN | NaN | 1.21 × 10−12 | 1.66 × 10−11 |
| F12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 |
| +/−/= | 9/1/2 | 10/0/2 | 10/0/2 | 9/0/3 | 9/0/3 | 11/0/1 | 12/0/0 |
| Fun No. | DBO | POA | HBA | SCSO | GCHHO | ISSA | MCFOA | MDBO | |
|---|---|---|---|---|---|---|---|---|---|
| CEC-1 | Mean | 3.62 × 107 | 6.57 × 109 | 5.71 × 103 | 2.49 × 109 | 4.20 × 103 | 1.04 × 1010 | 5.05 × 1010 | 8.99 × 102 |
| Std. | 3.47 × 107 | 3.63 × 109 | 4.24 × 103 | 2.08 × 109 | 3.42 × 103 | 2.34 × 109 | 6.21 × 108 | 1.54 × 103 | |
| p-value | 3.02 × 10−11 | 3.02 × 10−11 | 3.08 × 108 | 3.02 × 10−11 | 1.47 × 10−7 | 3.02 × 10−11 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | + | + | + | + | + | ||
| CEC-2 | Mean | 3.50 × 103 | 3.12 × 103 | 2.86 × 103 | 3.67 × 103 | 3.02 × 103 | 5.79 × 103 | 9.27 × 103 | 1.78 × 103 |
| Std. | 5.78 × 102 | 4.21 × 102 | 7.74 × 102 | 4.92 × 102 | 5.90 × 102 | 2.99 × 102 | 1.86 × 102 | 2.59 × 102 | |
| p-value | 3.02 × 10−11 | 3.69 × 10−11 | 3.96 × 10−8 | 3.02 × 10−11 | 5.07 × 10−10 | 3.02 × 10−11 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | + | + | + | + | + | ||
| CEC-3 | Mean | 8.40 × 102 | 9.39 × 102 | 8.00 × 102 | 9.06 × 102 | 8.72 × 102 | 9.72 × 102 | 1.18 × 103 | 7.58 × 102 |
| Std. | 4.23 × 101 | 2.99 × 101 | 2.89 × 101 | 3.52 × 101 | 3.53 × 101 | 3.14 × 101 | 5.25 × 100 | 1.34 × 101 | |
| p-value | 6.70 × 10−11 | 3.02 × 10−11 | 1.10 × 10−8 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | + | + | + | + | + | ||
| CEC-4 | Mean | 1.94 × 103 | 3.51 × 103 | 1.91 × 103 | 3.47 × 103 | 1.91 × 103 | 2.15 × 104 | 3.86 × 107 | 1.91 × 103 |
| Std. | 6.81 × 101 | 1.78 × 103 | 4.80 × 100 | 3.37 × 103 | 5.67 × 100 | 1.48 × 104 | 2.19 × 106 | 4.73 × 100 | |
| p-value | 9.83 × 10−8 | 3.02 × 10−11 | 6.20 × 10−1 | 3.02 × 10−11 | 1.24 × 10−3 | 3.02 × 10−11 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | − | + | + | + | + | ||
| CEC-5 | Mean | 1.22 × 106 | 1.35 × 105 | 1.64 × 105 | 7.79 × 105 | 4.75 × 105 | 2.04 × 106 | 4.81 × 107 | 3.21 × 105 |
| Std. | 9.62 × 105 | 9.98 × 104 | 1.21 × 105 | 5.78 × 105 | 2.66 × 105 | 6.98 × 105 | 5.83 × 106 | 1.72 × 105 | |
| p-value | 3.26 × 10−7 | 5.27 × 10−5 | 4.98 × 10−4 | 3.18 × 10−4 | 1.99 × 10−2 | 3.02 × 10−11 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | + | + | + | + | + | ||
| CEC-6 | Mean | 2.24 × 103 | 2.24 × 103 | 2.10 × 103 | 2.18 × 103 | 2.00 × 103 | 2.92 × 103 | 7.66 × 103 | 1.67 × 103 |
| Std. | 2.53 × 102 | 1.88 × 102 | 3.42 × 102 | 2.22 × 102 | 2.01 × 102 | 2.43 × 102 | 1.54 × 102 | 6.62 × 101 | |
| p-value | 4.08 × 10−11 | 3.34 × 10−11 | 1.96 × 10−10 | 3.34 × 10−11 | 4.50 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | + | + | + | + | + | ||
| CEC-7 | Mean | 6.19 × 105 | 2.60 × 104 | 9.52 × 104 | 2.56 × 105 | 1.37 × 105 | 1.18 × 106 | 7.69 × 108 | 2.03 × 105 |
| Std. | 7.71 × 105 | 3.27 × 104 | 8.49 × 104 | 3.08 × 105 | 9.82 × 104 | 5.94 × 105 | 2.63 × 107 | 1.32 × 105 | |
| p-value | 1.33 × 10−2 | 5.97 × 10−9 | 6.20 × 10−4 | 6.73 × 10−1 | 5.37 × 10−2 | 9.92 × 10−11 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | + | − | − | + | + | ||
| CEC-8 | Mean | 2.38 × 103 | 3.12 × 103 | 2.84 × 103 | 2.93 × 103 | 2.41 × 103 | 3.60 × 103 | 9.53 × 103 | 2.51 × 103 |
| Std. | 3.15 × 102 | 8.44 × 102 | 1.48 × 103 | 9.68 × 102 | 5.57 × 102 | 6.70 × 102 | 1.26 × 102 | 6.20 × 102 | |
| p-value | 1.25 × 10−4 | 5.09 × 10−8 | 9.03 × 10−4 | 6.01 × 10−8 | 2.32 × 10−2 | 8.35 × 10−8 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | + | + | + | + | + | ||
| CEC-9 | Mean | 3.00 × 103 | 3.01 × 103 | 2.96 × 103 | 2.94 × 103 | 2.94 × 103 | 3.04 × 103 | 4.55 × 103 | 2.92 × 103 |
| Std. | 8.21 × 101 | 5.69 × 101 | 1.29 × 102 | 4.64 × 101 | 4.87 × 101 | 2.59 × 101 | 1.86 × 101 | 9.77 × 101 | |
| p-value | 1.11 × 10−3 | 1.09 × 10−5 | 6.52 × 10−1 | 5.30 × 10−1 | 5.49 × 10−1 | 2.92 × 10−9 | 3.02 × 10−11 | N/A | |
| Signed-rank test | + | + | − | − | − | + | + | ||
| CEC-10 | Mean | 2.98 × 103 | 3.12 × 103 | 2.96 × 103 | 3.07 × 103 | 2.98 × 103 | 3.56 × 103 | 1.12 × 104 | 2.99 × 103 |
| Std. | 4.91 × 101 | 1.24 × 102 | 4.07 × 101 | 7.76 × 101 | 3.62 × 101 | 1.32 × 102 | 1.95 × 102 | 2.24 × 101 | |
| p-value | 9.93 × 10−2 | 1.85 × 10−8 | 6.91 × 10−4 | 2.15 × 10−6 | 2.23 × 10−1 | 3.02 × 10−11 | 3.02 × 10−11 | N/A | |
| Signed-rank test | − | + | + | + | − | = | + | ||
| +/−/=/gm | 62/8/0/54 | ||||||||
| W | GBO | HPO | GWO | DBO | FOA | PSO | MDBO | |
|---|---|---|---|---|---|---|---|---|
| w1 = 0.7, w2 = 0.2, w3 = 0.1 | Best | 3.12 × 101 | 8.01 × 101 | 1.05 × 102 | 3.01 × 101 | 4.09 × 101 | 1.81 × 102 | 3.00 × 101 |
| Mean | 6.89× 101 | 1.78 × 102 | 2.56 × 102 | 3.56 × 101 | 5.95 × 101 | 2.68 × 102 | 3.37 × 101 | |
| Std | 4.54 × 101 | 6.03 × 101 | 1.15 × 102 | 5.36 × 100 | 1.27 × 101 | 5.65 × 101 | 2.92 × 100 | |
| w1 = 0.2, w2 = 0.7, w3 = 0.1 | Best | 3.20 × 101 | 1.15 × 102 | 1.39 × 102 | 3.56 × 101 | 4.70 × 101 | 1.93 × 102 | 3.36 × 101 |
| Mean | 1.08 × 102 | 2.63 × 102 | 2.81 × 102 | 4.47 × 101 | 7.91 × 101 | 3.12 × 102 | 4.33 × 101 | |
| Std | 7.53 × 101 | 8.33 × 101 | 1.24 × 102 | 5.74 × 100 | 1.38 × 101 | 6.32 × 101 | 5.51 × 100 | |
| w1 = 0.4, w2 = 0.4, w3 = 0.2 | Best | 3.09 × 101 | 1.85 × 102 | 8.88 × 101 | 2.97 × 101 | 4.71 × 101 | 2.87 × 102 | 2.80 × 101 |
| Mean | 1.11 × 102 | 3.60 × 102 | 4.50 × 102 | 3.59 × 101 | 7.96 × 101 | 4.86 × 102 | 3.40 × 101 | |
| Std | 8.11 × 101 | 1.11 × 102 | 1.40 × 102 | 4.77 × 100 | 2.08 × 101 | 8.36 × 101 | 7.62 × 100 | |
| w1 = 0.3, w2 = 0.5, w3 = 0.2 | Best | 3.56 × 101 | 1.66 × 102 | 1.82 × 102 | 3.10 × 101 | 5.67 × 101 | 3.53 × 102 | 2.89 × 101 |
| Mean | 1.49 × 102 | 4.13 × 102 | 4.41 × 102 | 3.63 × 101 | 9.26 × 101 | 5.33 × 102 | 3.47 × 101 | |
| Std | 8.66 × 101 | 1.30 × 102 | 1.64 × 102 | 3.45 × 100 | 2.37 × 101 | 1.02 × 102 | 4.39 × 100 | |
| w1 = 0.5, w2 = 0.3, w3 = 0.2 | Best | 2.99 × 101 | 1.41 × 102 | 1.83 × 102 | 2.85 × 101 | 5.86 × 101 | 3.30 × 102 | 2.61 × 101 |
| Mean | 1.13 × 102 | 3.14 × 102 | 4.35 × 102 | 3.37 × 101 | 8.72 × 101 | 4.81 × 102 | 3.32 × 101 | |
| Std | 1.11 × 102 | 1.05 × 102 | 1.65 × 102 | 7.27 × 100 | 1.96 × 101 | 1.04 × 102 | 8.63 × 100 |
| Tasks’ Numbers | Target Coordinates |
|---|---|
| 2 | [250,650,5], [500,450,10] |
| 3 | [250,650,5], [300,300,7], [700,300,10] |
| 4 | [250,650,5], [300,300,7], [600,800,12], [900,400,2] |
| Task Numbers | GBO | HPO | GWO | DBO | FOA | PSO | MDBO | |
|---|---|---|---|---|---|---|---|---|
| 2 | Best | 5.22 × 101 | 4.58 × 102 | 3.22 × 102 | 5.22 × 101 | 5.52 × 101 | 4.96 × 102 | 4.58 × 101 |
| Mean | 1.06 × 102 | 6.65 × 102 | 6.00 × 102 | 6.18 × 101 | 6.93 × 101 | 7.54 × 102 | 5.50 × 101 | |
| Std | 7.78 × 101 | 1.25 × 102 | 2.10 × 102 | 7.76 × 100 | 7.78 × 100 | 1.17 × 102 | 5.02 × 100 | |
| 3 | Best | 3.55 × 101 | 3.28 × 102 | 2.62 × 102 | 3.61 × 101 | 3.85 × 101 | 4.91 × 102 | 3.55 × 101 |
| Mean | 6.58 × 101 | 5.77 × 102 | 4.91 × 102 | 4.10 × 101 | 5.90 × 101 | 7.11 × 102 | 3.60 × 101 | |
| Std | 4.60 × 101 | 1.63 × 102 | 2.49 × 102 | 6.34 × 100 | 1.24 × 101 | 1.82 × 102 | 7.38 × 10−1 | |
| 4 | Best | 6.23 × 101 | 8.01 × 102 | 4.54 × 102 | 8.21 × 101 | 1.16 × 102 | 1.05 × 103 | 6.16 × 101 |
| Mean | 1.62 × 102 | 1.04 × 103 | 8.55 × 102 | 1.37 × 102 | 1.50 × 102 | 1.51 × 103 | 9.73 × 101 | |
| Std | 8.28 × 101 | 2.08 × 102 | 2.18 × 102 | 4.68 × 101 | 2.16 × 101 | 2.77 × 102 | 3.28 × 101 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Q.; Zhang, D.; Xie, M.; He, Q. Multi-Strategy Enhanced Dung Beetle Optimizer and Its Application in Three-Dimensional UAV Path Planning. Symmetry 2023, 15, 1432. https://doi.org/10.3390/sym15071432
Shen Q, Zhang D, Xie M, He Q. Multi-Strategy Enhanced Dung Beetle Optimizer and Its Application in Three-Dimensional UAV Path Planning. Symmetry. 2023; 15(7):1432. https://doi.org/10.3390/sym15071432
Chicago/Turabian StyleShen, Qianwen, Damin Zhang, Mingshan Xie, and Qing He. 2023. "Multi-Strategy Enhanced Dung Beetle Optimizer and Its Application in Three-Dimensional UAV Path Planning" Symmetry 15, no. 7: 1432. https://doi.org/10.3390/sym15071432