
Estimation of Lamb Wave Anti-Symmetric Mode Phase Velocity in Various Dispersion Ranges Using Only Two Signals


Abstract
:1. Introduction
2. Phase Velocity Evaluation in Dispersive Media
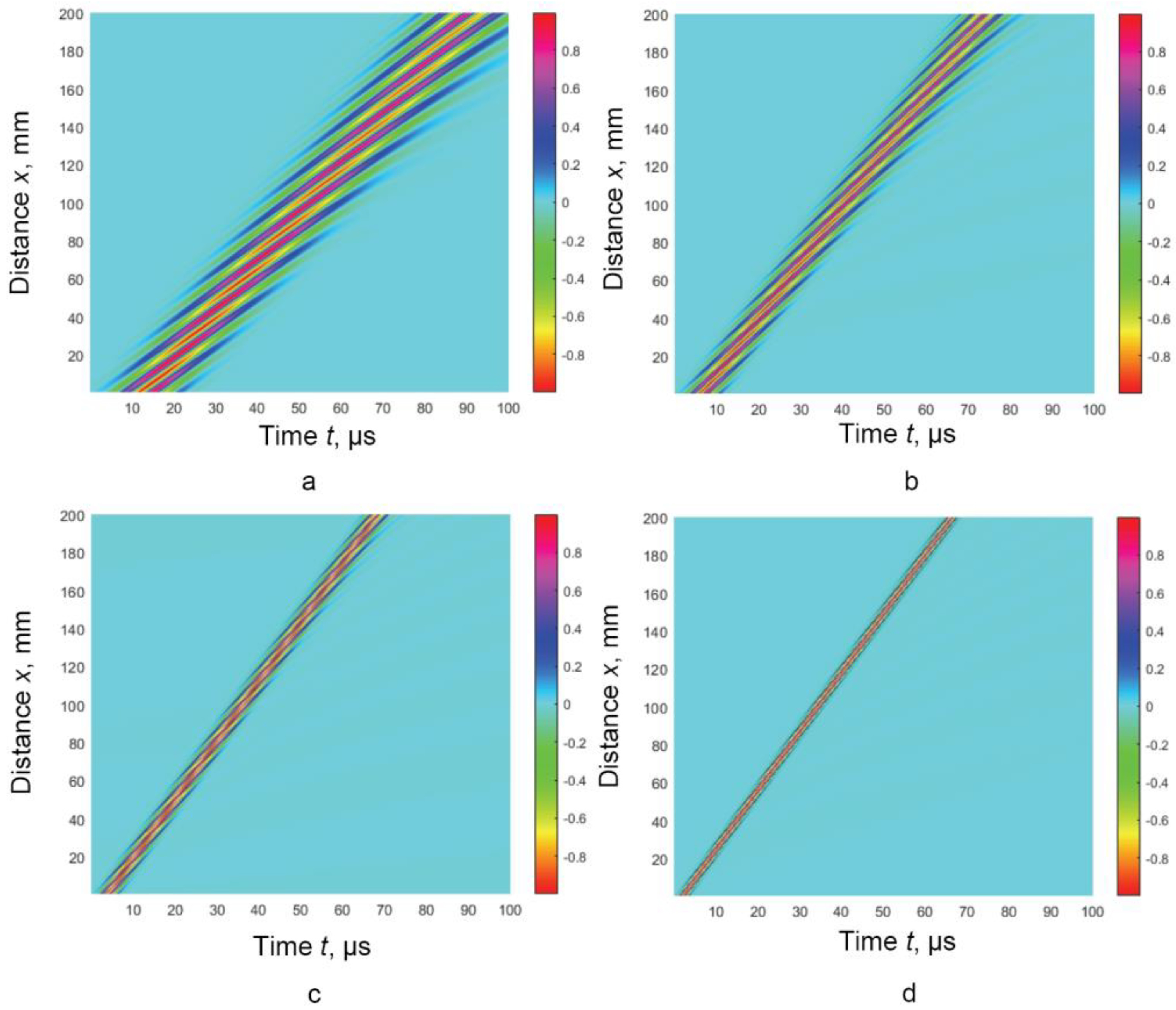
2.1. Analytical Calculation of Propagating Wave Signals
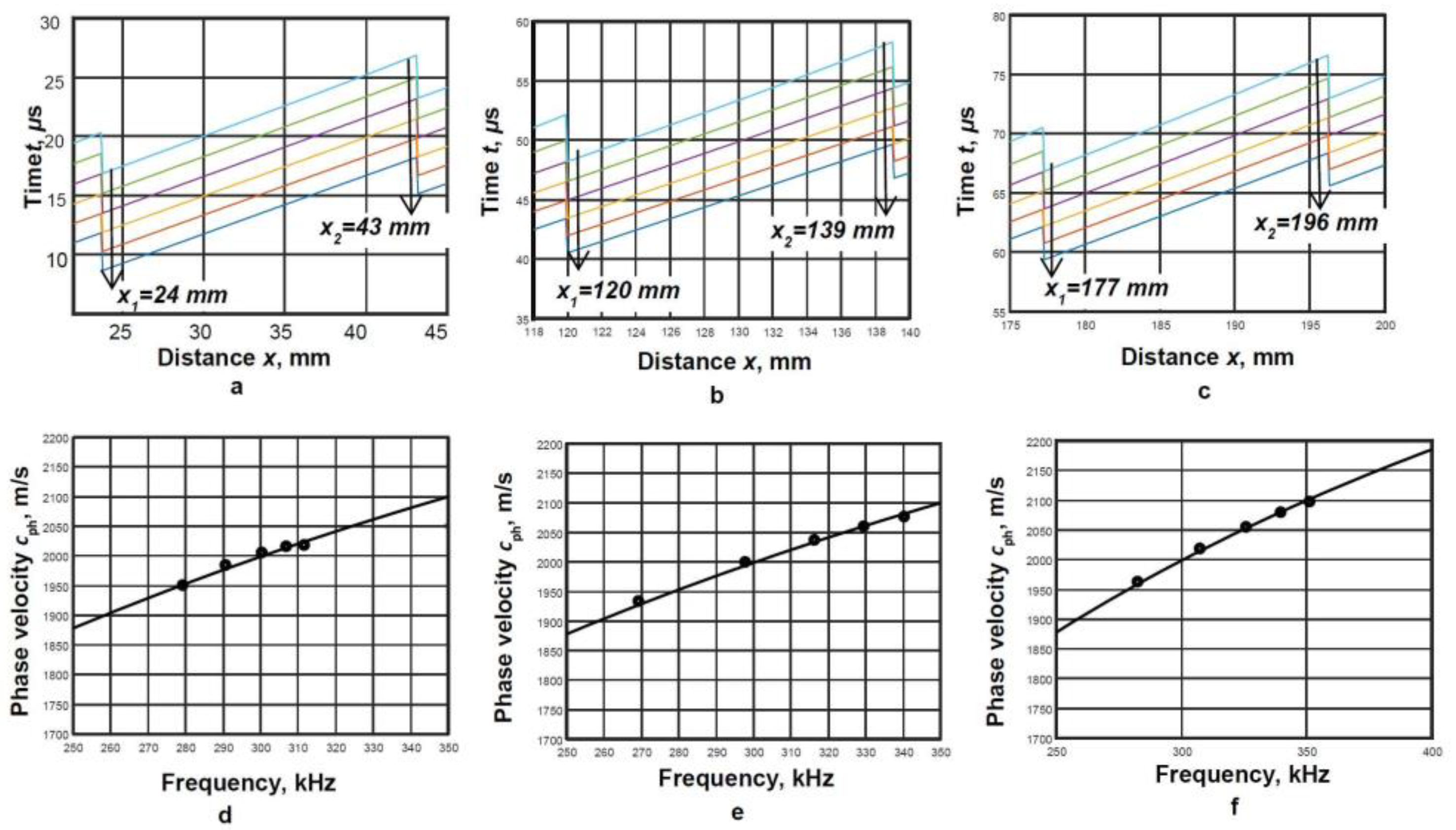
2.2. Zero Crossing Technique
- The phase velocity calculation
- The calculation of frequency
- The segments of the phase velocity dispersion curve are described by creating sets of pairs of frequencies fki and determined phase (cph,k) velocities:
2.3. Phase Velocity Features in Dispersion Range
2.4. Evaluation of the Phase Velocity Using Two Signals
2.4.1. Evaluation of the Phase Velocity at 300 kHz Frequency Range
2.4.2. Evaluating Phase Velocity across Various Dispersion Ranges
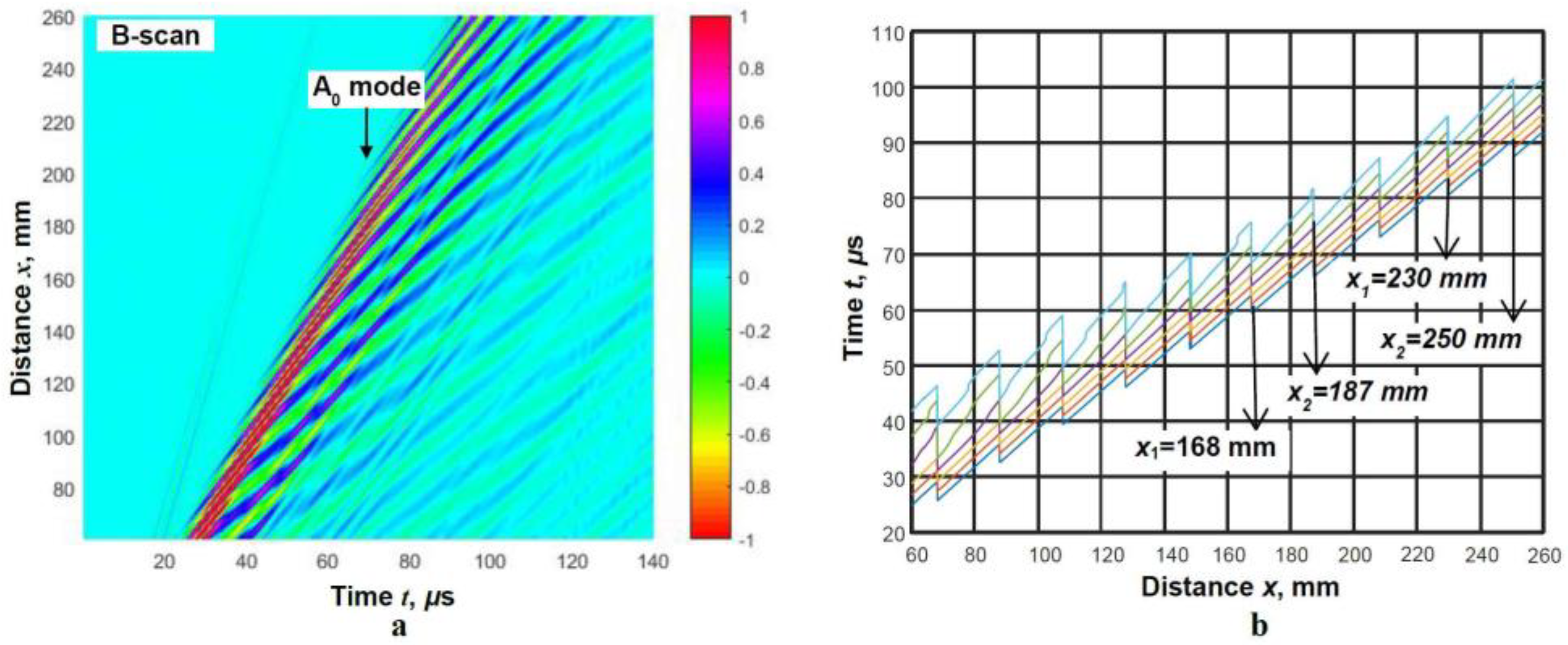
3. Experimental Study
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Masserey, B.; Raemy, C.; Fromme, P. High-frequency guided ultrasonic waves for hidden defect detection in multi-layered aircraft structures. Ultrasonics 2014, 54, 1720–1728. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chia, C.C.; Lee, S.Y.; Harmin, M.Y.; Choi, Y.; Lee, J.-R. Guided ultrasonic waves propagation imaging: A review. Meas. Sci. Technol. 2023, 34, 052001. [Google Scholar] [CrossRef]
- Yang, Z.; Yang, H.; Tian, T.; Deng, D.; Hu, M.; Ma, J.; Wu, Z. A review in guided-ultrasonic-wave-based structural health monitoring: From fundamental theory to machine learning techniques. Ultrasonics 2023, 133, 107014. [Google Scholar] [CrossRef]
- Hu, Y.; Zhu, Y.; Tu, X.; Lu, J.; Li, F. Dispersion curve analysis method for Lamb wave mode separation. Struct. Health Monit. 2020, 19, 1590–1601. [Google Scholar] [CrossRef]
- Pai, P.F.; Deng, H.; Sundaresan, M.J. Time-frequency characterization of lamb waves for material evaluation and damage inspection of plates. Mech. Syst. Signal Process. 2015, 62–63, 183–206. [Google Scholar] [CrossRef]
- Gorgin, R.; Luo, Y.; Wu, Z. Environmental and operational conditions effects on Lamb wave based structural health monitoring systems: A review. Ultrasonics 2020, 105, 106114. [Google Scholar] [CrossRef]
- Yang, T.; Zhou, W.; Yu, L. Guided Wave-Based Damage Detection of Square Steel Tubes Utilizing Structure Symmetry. Symmetry 2023, 15, 805. [Google Scholar] [CrossRef]
- Xie, J.; Ding, W.; Zou, W.; Wang, T.; Yang, J. Defect Detection inside a Rail Head by Ultrasonic Guided Waves. Symmetry 2022, 14, 2566. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, G.; Fan, D.; Fang, L.; Huang, L. Nonlinear Lamb wave analysis for microdefect identification in mechanical structural health assessment. Measurement 2020, 164, 108026. [Google Scholar] [CrossRef]
- Draudviliene, L.; Meskuotiene, A.; Mazeika, L.; Raisutis, R. Assessment of Quantitative and Qualitative Characteristics of Ultrasonic Guided Wave Phase Velocity Measurement Technique. J. Nondestr. Eval. 2017, 36, 22. [Google Scholar] [CrossRef]
- Zima, B.; Woloszyk, K.; Garbatov, Y. Corrosion degradation monitoring of ship stiffened plates using guided wave phase velocity and constrained convex optimization method. Ocean. Eng. 2022, 253, 111318. [Google Scholar] [CrossRef]
- Olisa, S.C.; Khan, M.A.; Starr, A. Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions. Sensors 2021, 21, 811. [Google Scholar] [CrossRef]
- Jia, H.; Zhang, Z.; Liu, H.; Dai, F.; Liu, Y.; Leng, J. An approach based on expectation-maximization algorithm for parameter estimation of Lamb wave signals. Mech. Syst. Signal Process. 2019, 120, 341–355. [Google Scholar] [CrossRef]
- Wilcox, P.D. A rapid signal processing technique to remove the effect of dispersion from guided wave signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2003, 50, 419–427. [Google Scholar] [CrossRef] [PubMed]
- Su, Z.; Ye, L.; Lu, Y. Guided Lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar] [CrossRef]
- Dai, D.; He, Q. Structure damage localization with ultrasonic guided waves based on a time–frequency method. Signal Process. 2014, 96, 21–28. [Google Scholar] [CrossRef]
- Golub, M.V.; Doroshenko, O.V.; Arsenov, M.A.; Bareiko, I.A.; Eremin, A.A. Identification of Material Properties of Elastic Plate Using Guided Waves Based on the Matrix Pencil Method and Laser Doppler Vibrometry. Symmetry 2022, 14, 1077. [Google Scholar] [CrossRef]
- Ghose, B.; Panda, R.S.; Balasubramaniam, K. Phase velocity measurement of dispersive wave modes by Gaussian peak-tracing in the f-k transform domain. Meas. Sci. Technol. 2021, 32, 124006. [Google Scholar] [CrossRef]
- Zeng, L.; Huang, L.; Cao, X.; Gao, F. Determination of Lamb wave phase velocity dispersion using time–frequency analysis. Smart Mater. Struct. 2019, 28, 115029. [Google Scholar] [CrossRef]
- Zeng, L.; Cao, X.; Huang, L.; Luo, Z. The measurement of Lamb wave phase velocity using analytic cross-correlation method. Mech. Syst. Signal Process 2021, 151, 107387. [Google Scholar] [CrossRef]
- Crespo, B.H.; Courtney, C.; Engineer, B. Calculation of Guided Wave Dispersion Characteristics Using a Three-Transducer Measurement System. Appl. Sci. 2018, 8, 1253. [Google Scholar] [CrossRef] [Green Version]
- Draudviliene, L.; Tumsys, O.; Mazeika, L.; Zukauskas, E. Estimation of the Lamb wave phase velocity dispersion curves using only two adjacent signals. Compos. Struct. 2021, 258, 113174. [Google Scholar] [CrossRef]
- Zima, B.; Woloszyk, K.; Garbatov, Y. Experimental and numerical identification of corrosion degradation of ageing structural components. Ocean Eng. 2022, 258, 111739. [Google Scholar] [CrossRef]
- Bartoli, I.; Marzani, A.; di Scalea, F.L.; Viola, E. Modeling wave propagation in damped waveguides of arbitrary cross-section. J. Sound Vib. 2006, 295, 685–707. [Google Scholar] [CrossRef]
- Hayashi, T.; Song, W.-J.; Rose, J.L. Guided wave dispersion curves for a bar with an arbitrary cross-section, a rod and rail example. Ultrasonics 2003, 41, 175–183. [Google Scholar] [CrossRef]
- He, P. Simulation of ultrasound pulse propagation in lossy media obeying a frequency power law. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1998, 45, 114–125. [Google Scholar] [CrossRef] [Green Version]
- Vladišauskas, A.; Šliteris, R.; Raišutis, R.; Seniūnas, G.; Žukauskas, E. Contact ultrasonic transducers for mechanical scanning systems. Ultragarsas 2010, 65, 30–35. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zero-Crossing Point | I | II | III | IV | V | VI |
|---|---|---|---|---|---|---|
| x1 = 139 mm; x2 = 158 mm | ||||||
| , m/s | 2092 | 2077 | 2058 | 2059 | 1984 | 1905 |
| x1 = 139 mm; x2 = 160 mm | ||||||
| , m/s | 2757 | 2755 | 2754 | 2750 | 2741 | 2724 |
| Distance of the signals, mm | x1 = 24; x2 = 43 | x1 = 120; x2 = 139 | x1 = 177; x2 = 196 |
| , % | 0.22 | 0.22 | 0.2 |
| Frequency, kHz | Phase Velocity, m/s | Group Velocity, m/s | |
|---|---|---|---|
| 150 | 1547 | 2571 | 25 |
| 500 | 2323 | 3115 | 18 |
| 900 | 2625 | 3117 | 18 |
| Frequency, kHz | 150 | 500 | 900 |
|---|---|---|---|
| , % | 0.33 | 0.23 | 0.11 |
| Distance of the signals, mm | x1 = 168; x2 = 187 | x1 = 230; x2 = 250 | |
| A0 mode | , % | 0.91 | 1.36 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Draudvilienė, L.; Raišutis, R. Estimation of Lamb Wave Anti-Symmetric Mode Phase Velocity in Various Dispersion Ranges Using Only Two Signals. Symmetry 2023, 15, 1236. https://doi.org/10.3390/sym15061236
Draudvilienė L, Raišutis R. Estimation of Lamb Wave Anti-Symmetric Mode Phase Velocity in Various Dispersion Ranges Using Only Two Signals. Symmetry. 2023; 15(6):1236. https://doi.org/10.3390/sym15061236
Chicago/Turabian StyleDraudvilienė, Lina, and Renaldas Raišutis. 2023. "Estimation of Lamb Wave Anti-Symmetric Mode Phase Velocity in Various Dispersion Ranges Using Only Two Signals" Symmetry 15, no. 6: 1236. https://doi.org/10.3390/sym15061236