1. Introduction
The most dangerous infectious diseases were listed by medical sciences researchers through testing by various laboratories. Among them, one of the diseases of the stomach is caused by noroviruses (NoV), which enter through fecal–oral paths and interact with human feeding. These types of viruses may also be found in the shedding of vomitus. Besides these sources, the contamination of used food or water and contact with fomites or direct contact with any infected individuals may also cause this type of epidemic [
1]. The local significance for each of these paths has been discussed but it is widely known that the NoV group of viruses alone is responsible for a huge epidemic due to food consumption and creates a burden on health in various countries [
2,
3]. The acute viral gastroenteritis viruses are related to three types of foods, which can cause an epidemic:
- A1:
The shells of molluscs are contaminated with different impurities during production.
- A2:
Fresh food items can be contaminated at the time of packing, collection, and harvesting.
- A3:
Taking more time to prepare and cook food can lead to contamination.
Poor practical and personal hygiene when handling foods is the main cause of contaminated food, which can lead to the transmission of an NoV epidemic. This type of food contamination will depend on many factors such as personal hygiene habits, the output of the virus, time of virus transfer, duration of the existence of the virus, time of inactivation for the virus, the shedding effect of the virus and many other factors. The contamination of hands may contaminate different surfaces depending upon the degree of touching and contamination of hands. The hands in this situation may contribute to the epidemic as well as receiving the disease [
4]. The spreading of norovirus (NoV) and its results may depend on many factors. It may also depend on weather conditions and nearly half of the cases may occur in the winter season [
5].
Mathematical models of epidemiological problems have been applied to the prediction and control of infectious diseases [
6,
7,
8,
9,
10]. Different global problems of epidemic diseases have very interesting outcomes as represented by mathematical formulations given in the past literature. Some aspects of this concept include stochastic representation which have impacts, such as global humidity, perceptions, heat occurrence, etc., which affect the strength of the immune system against infective diseases. This idea will enable us to write the deterministic idea in the form of random situations which have more realistic outcomes. This will include all the other external impacts in the form of mathematical formulation. This will cause vibration in the parameters from the environment or some variation in the infectious models or due to the given system [
11,
12]. This approach of modeling provides more choices for selection and gives more realistic results as compared to the idealistic approach of deterministic models. Therefore, the stochastic concepts that are perturbed by white noise or Brownian motion are well represented in the literature, for detail one can see [
13].
The relationship between symmetry and epidemic models relates to how the distribution of susceptible, infected, and recovered individuals in a population are affected by factors such as demographic and environmental symmetry. Symmetry considerations can play a role in the modeling of disease transmission dynamics, as they can affect the spatial and temporal spread of an epidemic. For example, if a population is asymmetric with respect to some underlying factor, such as age or location, this could lead to differences in the transmission of a disease and impact the effectiveness of control strategies. In the context of mathematical modeling, accounting for symmetry in the population being modeled can help to improve the accuracy of epidemic models and provide valuable insights into the spread and control of infectious diseases [
14,
15,
16]. Fractional calculus, as used in the paper abstract mentioned earlier, is one approach to modeling the impact of symmetry in disease transmission dynamics. By developing models that account for the effects of asymmetry, researchers can gain a better understanding of the underlying mechanisms driving epidemics and develop more effective strategies to prevent and control their spread.
As we describe any system having different choices for the selection of the order of the derivative, the extra degrees will be obtained in the complex dynamics. This extra variety of choices can be studied in modern calculus in the form of non-natural order derivative expressions whose outcomes must be obtained as the whole density of the quantities [
17,
18,
19]. Due to this, modern calculus will be superior to classical calculus. The medical sciences and natural sciences dynamical systems require more and more information, therefore these can be well investigated using different fractional operators for the internal behavior of the system; for the last few decades, this has been the central focus of many researchers as compared to the integer order analysis. In this field, the investigation is related to unique and solution existence, positivity, boundedness, numerical solution, and the realistic approach of feasibility. To date, various problems of small micro species, logistic population problems, HBV, TB, HCV, SIR, SEIR, SI, and many cancer problems have been investigated in the sense of fractional order derivatives [
20,
21,
22,
23,
24]. These problems are tested for theoretical and approximate solutions in the non-integer order parameters sensed by the application of various techniques. Some examples are the Adams–Bashforth, corrector-predictor method, various transformations, and series solution techniques [
25,
26]. The analysis of COVID-19 problems has been investigated recently through fractional operators as can be seen in [
27,
28,
29]. The literature is full of articles related to infectious disease problems and their analysis for different dynamics [
30,
31].
A fractional derivative is a generalization of the standard derivative to non-integer orders. It is defined using the Riemann–Liouville fractional integral, which is a generalization of the standard integral to non-integer orders [
17,
18]. The fractional derivative has applications in many areas of science and engineering, including mathematical biology. In mathematical biology, fractional derivatives are used to model various phenomena such as diffusion in porous media, blood flow in vessels, and the spread of diseases. For example, in the study of tumor growth, a fractional derivative model can be used to describe the diffusion of nutrients and oxygen through the tumor tissue, which is a non-local process. Additionally, in the study of the spread of infectious diseases, a fractional derivative model can be used to describe the spread of the disease through a population, which is also a non-local process. There have been a variety of fractional operators proposed in the literature with both nonsingular and singular kernels [
20,
21,
22,
23,
24,
32]. The work of [
25,
26,
33,
34,
35] and references cited therein present a comprehensive study and the application of these fractional order operators as well as a detailed analysis of their implementation.
The Atangana–Baleanu fractional derivative is a particular type of fractional derivative that is defined using a Caputo–Fabrizio type of kernel function. It is named after its inventors, Atangana and Baleanu, who introduced it in their 2016 paper [
25]. This fractional derivative is a generalization of the Caputo fractional derivative, which is one of the most widely used fractional derivatives in mathematical biology. It can be used to model various phenomena such as diffusion in porous media, blood flow in vessels, and the spread of diseases. In mathematical biology, the Atangana-Baleanu fractional derivative has been used to model various phenomena such as the spread of infectious diseases, tumor growth, and the spread of pollutants in a porous medium. For example, in the study of the spread of infectious diseases, a fractional derivative model can be used to describe the spread of the disease through a population, which is a non-local process. Additionally, in the study of tumor growth, the Atangana–Baleanu fractional derivative can be used to describe the diffusion of nutrients and oxygen through the tumor tissue, which is also a non-local process. In the study of the spread of pollutants in a porous medium, the Atangana–Baleanu fractional derivative can be used to describe the diffusion of pollutants through the porous medium, which is also a non-local process. It has been found that in many cases that the Atangana–Baleanu fractional derivative provides a better fit than other types of fractional derivatives, such as the Caputo fractional derivative, for the above-mentioned phenomena.
As for the motivation of our work, we kept in mind the above significance of fractional calculus and took a novel problem related to the norovirus (NoV) using the Atangana–Baleanu arbitrary order differentiation by applying the conditions of asymptomatic and vaccinated classes. For the discussion, different aspects of NoV mathematical formulation have been used. Here, we discuss the said epidemic with the inclusion of two classes of asymptomatic carriers and vaccinated classes for more effective analysis. There is a duration of 30–180 days in which the signs of NoV virus and the risk of infection by an infectious person with a chance of death can manifest [
36,
37]. On reviewing the literature, we have formulated a new problem for the NoV viruses with two new compartments [
9,
12,
30,
31]. Firstly, the problem was constructed for the integer order and, after that, it was modified and extended to the fractional version of the Atangana–Baleanu derivative. The main objective of this article was to evaluate the mathematical formulation, testing the problem on public health with vaccination and dilation of time for controlling an NoV epidemic.
The novelty of this paper is in the extension of the deterministic stochastic model [
38] to the Atanga–Beleanu fractional model, which offers a more realistic approach to epidemic modeling. The ABC fractional operator model provides several advantages over stochastic models in the context of epidemic modeling. First of all, it provides a deterministic framework that makes it possible to precisely and deterministically analyze the dynamics of epidemics, especially when examining how population symmetry affects spread and control. Contrarily, stochastic models introduce randomness and variability, creating uncertainties and making it difficult to comprehend the effects of population symmetry. Second, for better comprehension and management of epidemics, the ABC fractional operator model incorporates critical elements such as asymptomatic infected individuals and vaccination effects. This thorough representation takes into account the sizeable portion of infected people who might not show any symptoms. Stochastic models have limitations in accurately determining the effectiveness of control strategies and interventions because they do not explicitly take into account asymptomatic individuals or vaccination effects. Furthermore, the ABC model benefits from the application of fixed point theory, such as Schauder and Banach’s fixed point theory, to analyze the existence and uniqueness of solutions. This mathematical approach provides rigorous foundations, ensuring reliable and valid outcomes. In contrast, stochastic models heavily rely on probabilistic methods and simulations, which can be computationally intensive and susceptible to statistical fluctuations. Moreover, the utilization of MATLAB software in the ABC model enables efficient computation and visualization of epidemic dynamics. This capability facilitates insights into model behavior under various scenarios and interventions, supporting informed decision-making in epidemic control. Collectively, the advantages of the ABC fractional operator model make it a valuable tool for epidemic modeling, offering greater realism and enhanced analytical capabilities compared to stochastic models.
The organization of this paper is as follows: Ii
Section 2, we will formulate a novel mathematical model.
Section 3 presents some basic definitions of fractional operators. In
Section 4, the mathematical analysis determines whether there is a solution that exists and how certain terms can be optimized (
3). The qualitative theory is studied in
Section 5. The basic reproductive number and sensitivity analysis of the model are presented in
Section 6.
Section 7 studied the approximate solution of the model (
3).
Section 8 presented the parameter estimation of the model. In
Section 9, we verify our theoretical results using numerical simulations. At the end of this paper, we summarize the main findings of our research in a section titled Conclusions.
2. Model Formulation
We extended Cui et al.’s model [
38] which has five equations that are applicable to the considered infection mathematical model describing norovirus (NoV). All the density of individuals is distributed in five different compartmental agents, namely: Susceptible class
, Vaccinated individuals
, Asymptomatic or Exposed individuals
, Symptomatic or Infectious individuals
, and the Recovered class
, i.e.,
. The equations describing the model are
with the starting approximation,
where
is the recruitment rate representing the rate at which individuals enter the susceptible population.
is the transmission rate representing the probability of transmission per contact between susceptible individuals and infected individuals.
represents the density of individuals in the susceptible (healthy) class at time
t. The rate of change of
is determined by the balance between recruitment (
), transmission
, and the natural removal
of individuals.
represents the density of vaccinated individuals at time
t. The balance between transmission from susceptible individuals
, transmission from immunized individuals
, and natural removal of individuals
determines the rate of change of
. The density of people who are asymptomatic or exposed at time
t is represented by
. The balance between transmission from susceptible individuals and
determines the rate of change of this variable.
, transmission from immunized people
, recovery of people
, and natural removal.
indicates the proportion of people who are symptomatic or contagious at time
t. The balance between natural removal,
, and transmission to susceptible individuals
determines the rate of change of
.
represents the density of people who have been found at time
t. The recovery of individuals
and natural removal
determine the rate of change of
. The system of equations captures the interactions between those who are susceptible, those who have received vaccinations, those who are asymptomatic, those who are symptomatic, and those who have recovered to describe the dynamics of the norovirus epidemic. The spread and management of the epidemic over time are influenced by the rates of transmission, recovery, and removal as well as the population size
N. The behavior’s transition points are shown in
Figure 1.
The key objective was to construct a new numerical system (
1) using the ABC fractional derivative for an extra degree of choices of dynamical behavior. The qualitative analysis will be derived by the application of fixed point theory. The considered numerical problem will be analyzed, having a general derivative order of
as follows:
3. Preliminaries
This section introduces the operator and its properties, along with the numerical approximation method for solving fractional order differential equations.
Definition 1. If and , then is formulated asreplacing by , we obtain the Caputo–Fabrizo fractional derivative. It should be noticed thathere, is named the normal mapping given as . represents Mittag–Leffler mapping, the generalized exponent mapping [39,40,41]. In Definition 1, the operator is defined as a fractional derivative operator, denoted by , where is a function belonging to the space and q is a parameter in the range . The operator is expressed as an integral involving the derivative of and a Mittag–Leffler mapping , with representing the exponential function. The lemma also states the behavior of the operator for constant values.
Lemma 1. [42] Solution of the given equation for ,is given by Lemma 1 provides the solution to a fractional differential equation in terms of the operator. The equation represents a fractional order differential equation, where is the unknown function and is a given function. The lemma presents the explicit solution in terms of the initial condition , the function , and the parameters q, , and .
Definition 2. We can convert the fractional order DEs with order q in the form of the ABC derivative as Then, the approximate solution of (6) is given as follows: Definition 2 introduces the conversion of fractional order differential equations to the ABC derivative form. The equation represents a fractional order differential equation with the unknown function and the function on the right-hand side. The definition provides an approximation method for solving such equations using the operator. The approximate solution is expressed recursively in terms of the initial condition , the function , and parameters q, , , and h.
5. Stability Analysis
Hyers–Ulam stability, also known as Hyers–Ulam–Rassias stability, is a concept in the field of functional analysis that deals with the stability of functional equations. It is named after David Hyers, Stanislaw Ulam, and Themistocles Rassias, who independently proved that the Cauchy equation for functional equations is stable in certain cases. In other words, it states that if a function is close to a solution of a functional equation, then it is also a solution of that equation. This concept has been extended to include various types of functional equations, including those involving nonlinear operations. Overall, Hyers–Ulam stability plays an important role in the study of functional equations and has been applied in various areas of mathematics and science.
The proposed model stability is assured by the consideration of a small perturbation , related to the root of . Consider
- (i)
,
- (ii)
.
Lemma 2. The root of the perturbed model,satisfies the following expression,where Proof. The derivation is straight forward, so we skip it. □
Theorem 3. Using and (20) in lemma (2), the root of concerned integration Equation (10) is U-H stable and, so, the solution of the concerned problem is U-H stable if . Proof. Consider
to be one root and u
to be zero of (
10), then
By (
22), we say that the zero of (
10) is U-H stable and hence generalized U-H stable by applying
, implying that the zero of the considered system is U-H stable and so generalized U-H stable. □
Considering
- (i)
- (ii)
.
Lemma 3. The below equation holds for (19) Proof. This is also straight forward. □
Theorem 4. By Lemma (3), the root of the given model is U-H-Rassias stable and therefore, generalized U-H-Rassias stable.
Proof. Consider
to be one root and u
to be the root of (
10), then
we can write, from (
24),
Hence, the solution of (
10) is U-H-Rassias stable and so generalized U-H-Rassias stable. □
7. Approximate Solution by ABM Method
The numerical scheme used in this article is a fractional Adams–Bashforth–Moulton (ABM) method. The ABM method has a long history in numerical analysis, dating back to the work of Adams in the late 19th century. The method was further developed by Bashforth and Moulton in the early 20th century, and it has since been widely used in a variety of applications, including fluid dynamics, chemical kinetics, and population dynamics. Advantages of the ABM method include its simplicity and efficiency, as well as its ability to handle stiff equations. The method is based on the extrapolation of previous time steps, and it can be easily implemented using standard software packages. The fractional version of the ABM method used in this article is a relatively new development, arising from recent advances in fractional calculus. This version of the method is well-suited to problems involving fractional derivatives, which arise in many areas of science and engineering.
In this section of the article, we present the approximate solution; for this we can write model (
3)
Using the basic theorem of the generalized calculus known as fractional calculus, we can now obtain
At the moment
, we obtain our result as follows:
By approximating
in two stages of the interpolation of Lagrange polynomials in
, and after reentering it into (
28), we have the following:
The following outcome is obtained by integrating the terms contained in (
29) and plugging them back into it.
where
Approximate Solution by Newton’s Polynomial Method
Newton’s polynomial method is a numerical technique used to interpolate a set of data points using a polynomial function. The method involves constructing an nth degree polynomial that passes through data points. This polynomial can be evaluated at any point within the range of the data points to estimate the corresponding function value. The advantage of this method is its simplicity and efficiency, as it only requires basic algebraic operations to construct the polynomial. Additionally, it can accurately approximate complex functions with a high degree of precision. The method was first introduced by Sir Isaac Newton in the 17th century and has since been widely used in various fields, including engineering, physics, and computer science. There are several advantages of using Newton’s polynomial numerical methods. Firstly, it allows for accurate approximation of the values of functions, making it a useful tool in various fields such as engineering, physics, and economics. Secondly, the method is relatively simple to use and understand, making it accessible to a wider audience of mathematicians and scientists. Thirdly, the method can be applied to a wide range of functions and is not limited to specific types or classes. Fourthly, the method allows for easy and efficient calculation of the derivatives of the function, which can be useful in many applications. Finally, the method can be extended to higher dimensions, making it suitable for problems in multiple variables.
We derive the numerical scheme for the case of Mittag–Leffler as follows:
where
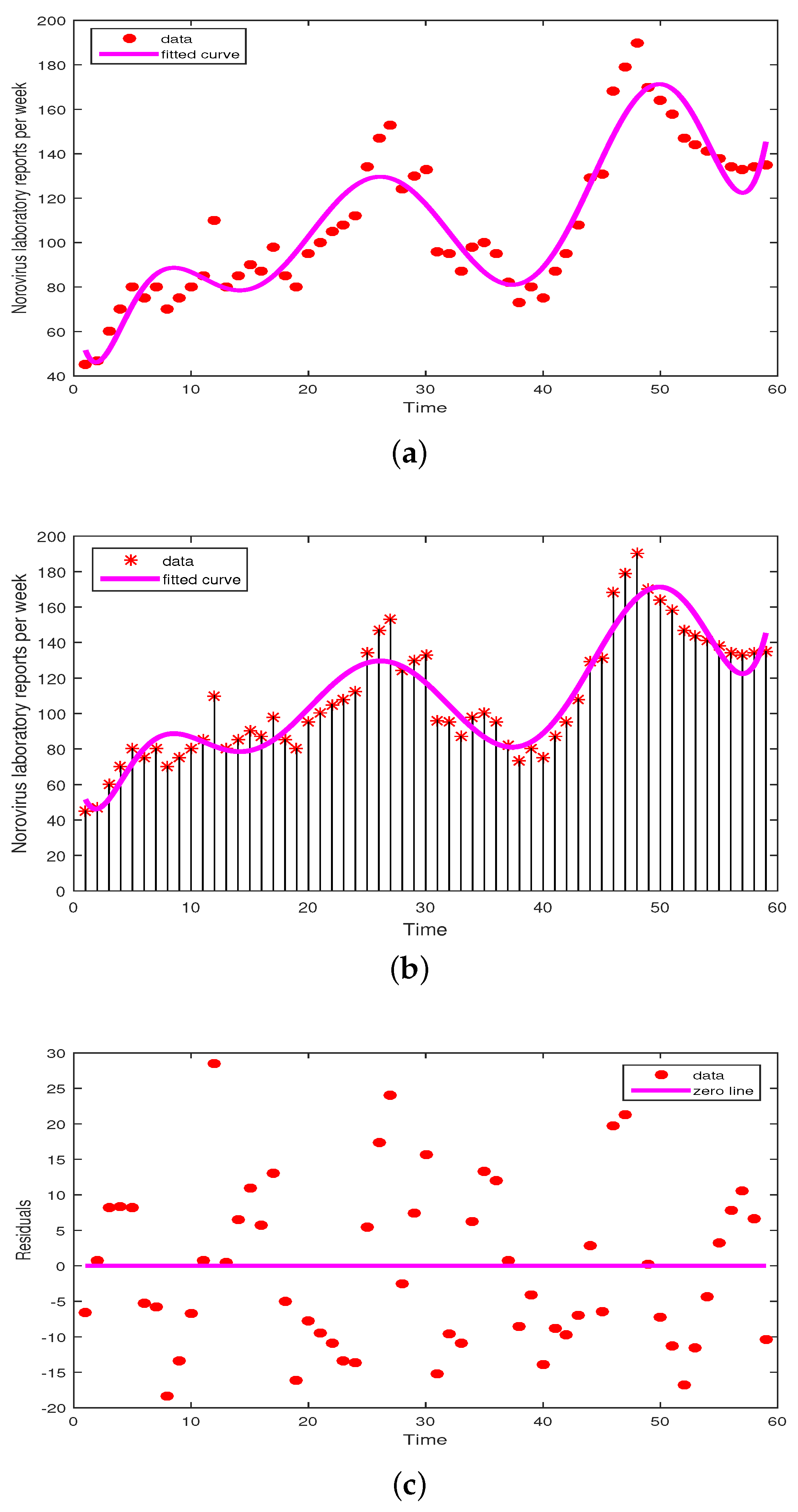
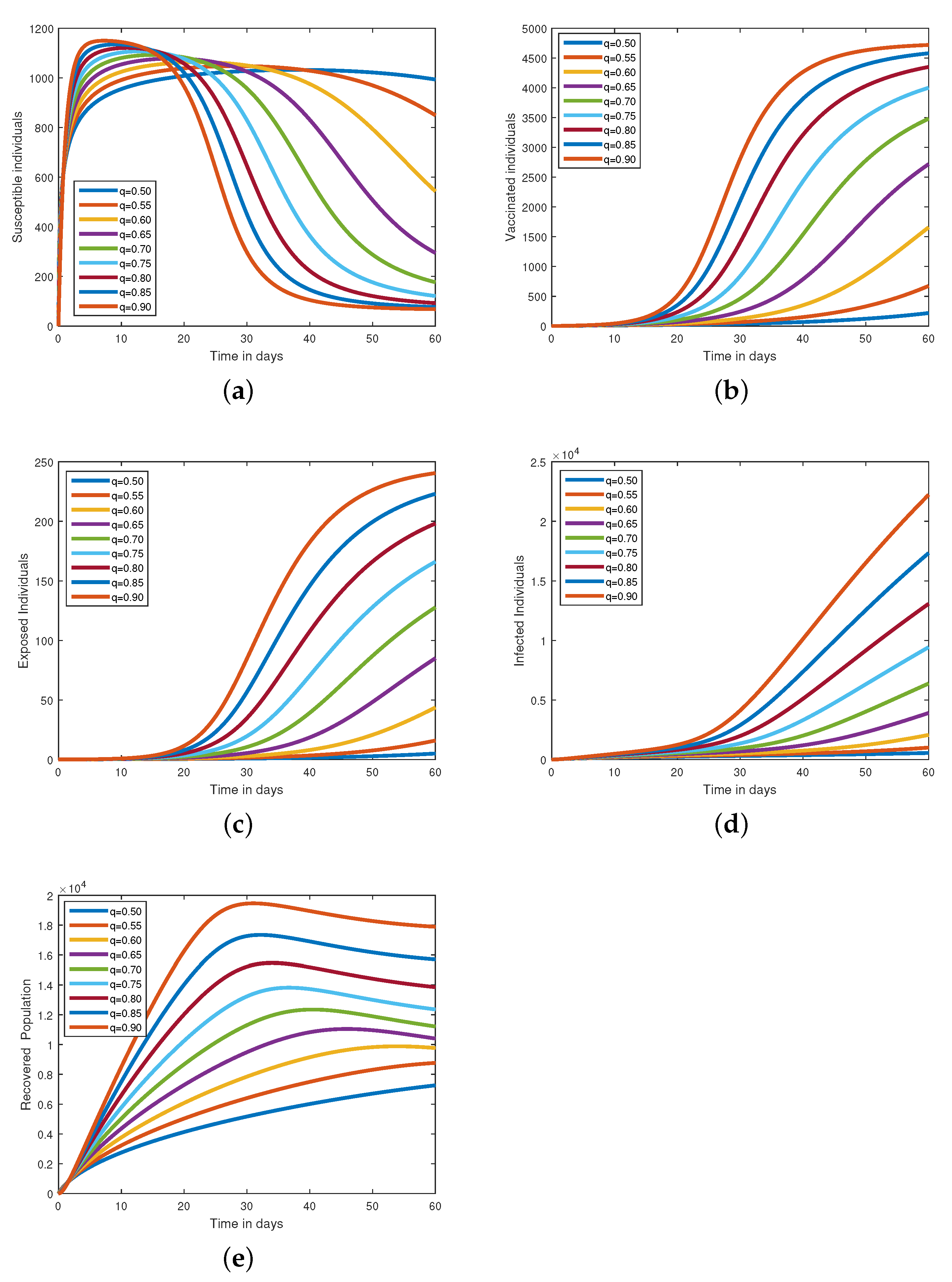
9. Numerical Simulation
In this section of the article, our aim was to find the approximate solution for the non-integer-order NoV (Norovirus) system using the ABC derivative of model (
3). The simulation was performed over a time interval ranging from 0 to 60 steps, utilizing MATLAB 2019. The system parameters are provided in
Table 1, and these values are used for graphical representation. The numerical simulation was conducted for various orders of
q, and the results indicate that the non-integer-order fractional derivative yields favorable outcomes for controlling the infected class. The dynamics of each class in the system (
3), for different values of
q such as
, are depicted in
Figure 4a–e.
Figure 4a illustrates an increasing trend in the number of healthy individuals with a decay occurring in the fractional order
q.
Figure 4c demonstrates the growth of the exposed class for arbitrary values of
q; however, after a certain time interval (around 20), the exposed class starts to decrease. The population of the infected class decreases over time as the values of
q decrease in
Figure 4d. Additionally,
Figure 4b illustrates how newborns can immunize themselves by being carried by their mothers. This implies that proper care for carrier mothers could result in the vaccination-induced recovery of newborns in as little as a day. Similar to this,
Figure 4e represents the recovery class and illustrates how people recover from infections. The approximative results show clear system deviations for various non-integer order parameter
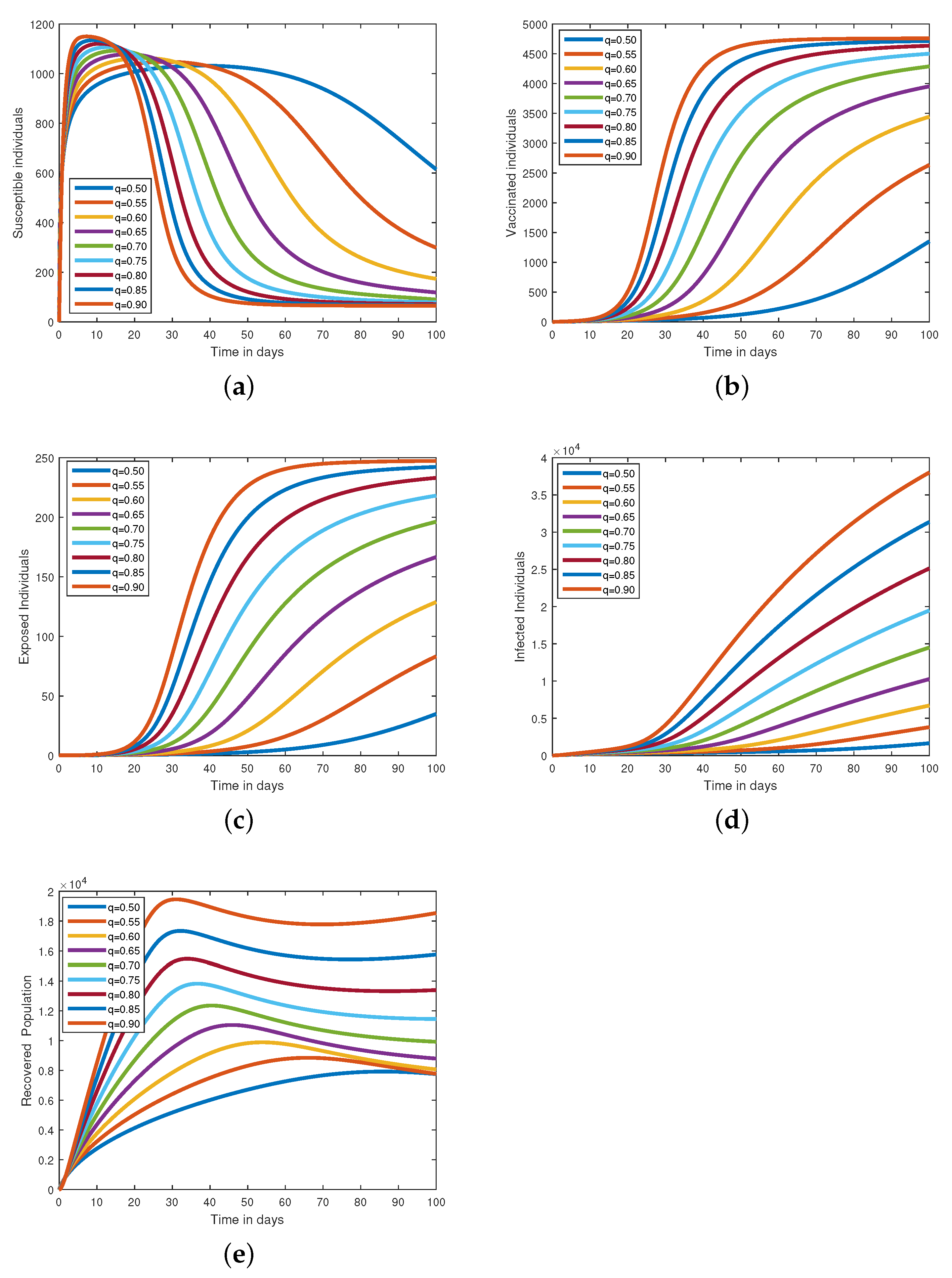
q values. The long-term simulation results obtained using ABM methods are also shown in
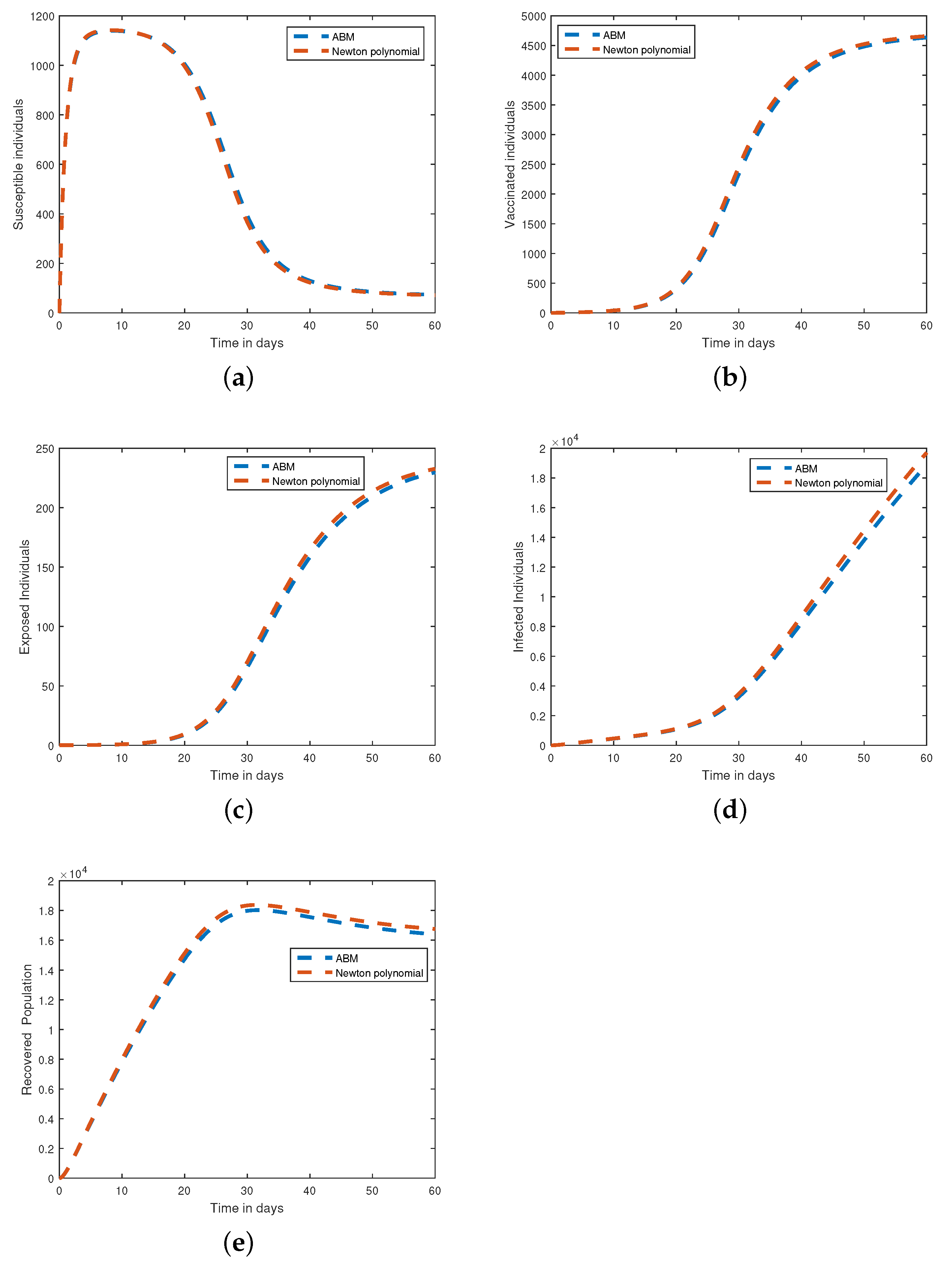
Figure 5. Additionally,
Figure 6 compares the simulation outcomes attained using the Newton polynomial and ABM approaches.
Figure 7 and
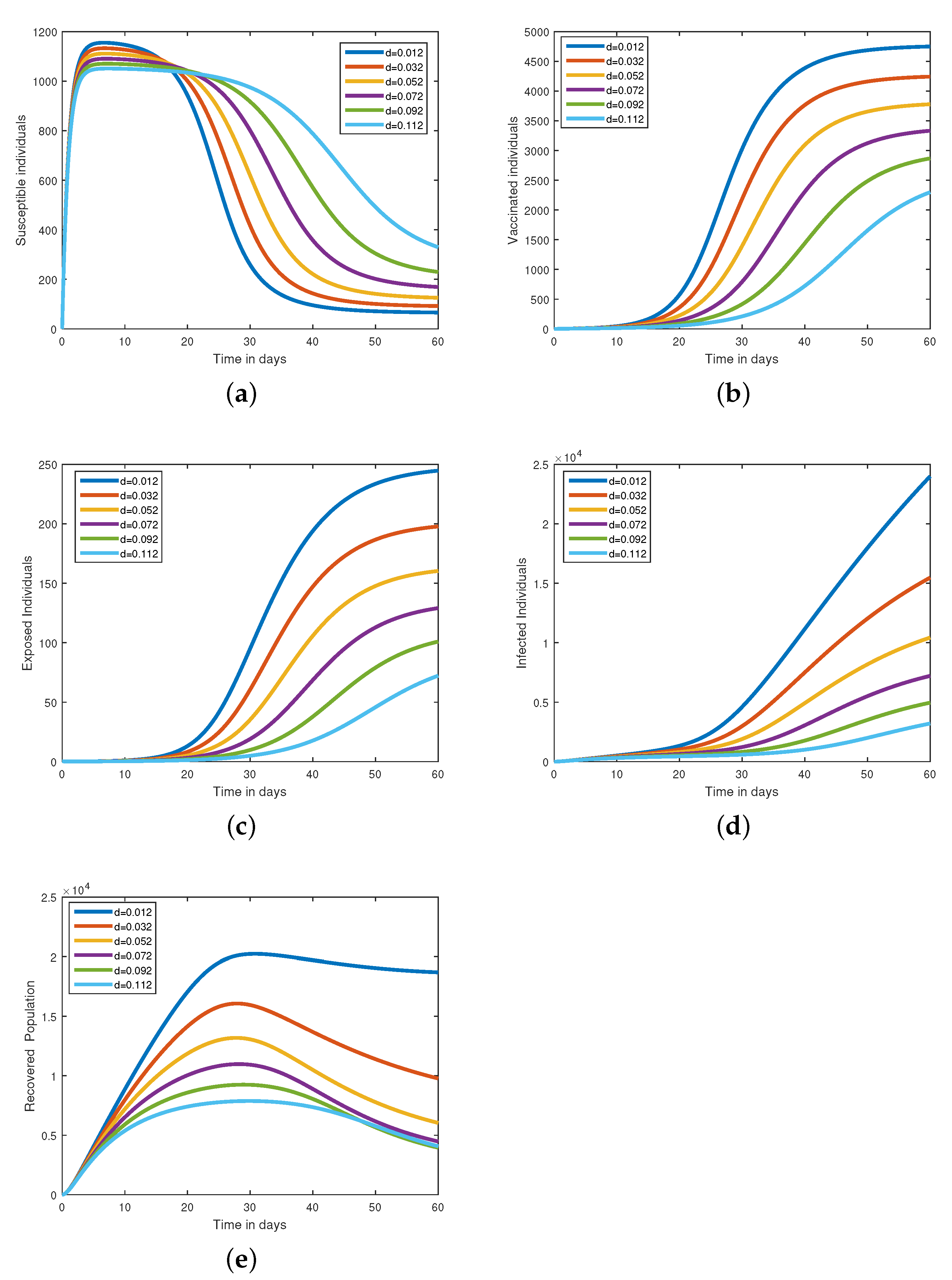
Figure 8 show the simulation results specifically for the Newton polynomial method. Additionally,
Figure 9 and
Figure 10 show, for each state variable, the effects of the transmission parameter
and the natural removal rate
d, respectively, on the results of the simulation.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}