
Computational Modeling of Individual Red Blood Cell Dynamics Using Discrete Flow Composition and Adaptive Time-Stepping Strategies

Abstract
:1. Introduction
2. Mathematical Framework
2.1. Preliminaries
2.2. Membrane Model
2.3. Interface Tracking: Level-Set Representation
2.4. Non-Newtonian Fluid Model
Dimensionless Nonlinear Coupled Problem
3. Composition Technique Applied to the Second-Order BDF Scheme
3.1. Second-Order Backward Differentiation BDF-2
- Step 1:
- Step 2:
3.2. Step 1: Calculation of an Intermediate Solution
3.3. Step 2 and Solution Method
3.4. Algorithm of Composed BDF-2 Scheme with Fixed Time Step
| Algorithm 1 Composed BDF-2 with fixed time step. |
|
3.5. Algorithm for Composing BDF-2 with Adaptive Time Step
| Algorithm 2 Composed BDF-2 with adaptive time steps. |
|
4. Numerical Approximation of the Fluid/Membrane Problem
4.1. Time Discretization of the Fluid Problem
4.2. Penalty Method
4.3. Level Set Problem
5. Numerical Results
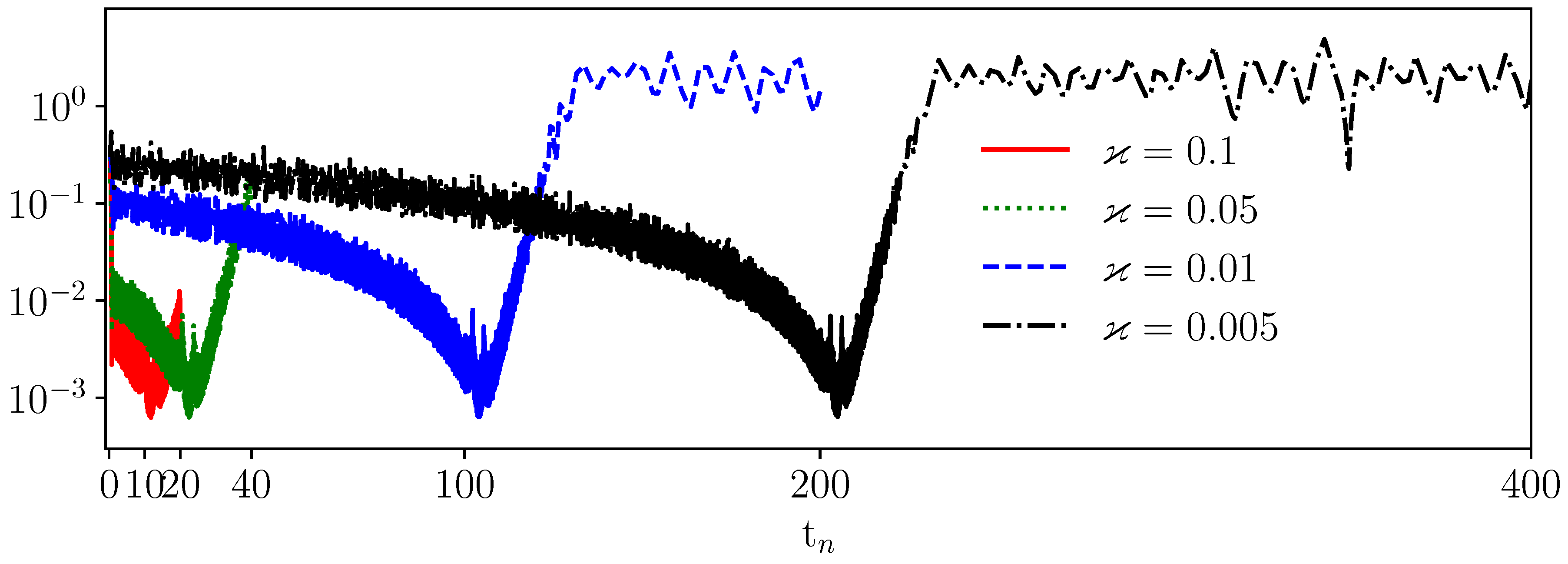
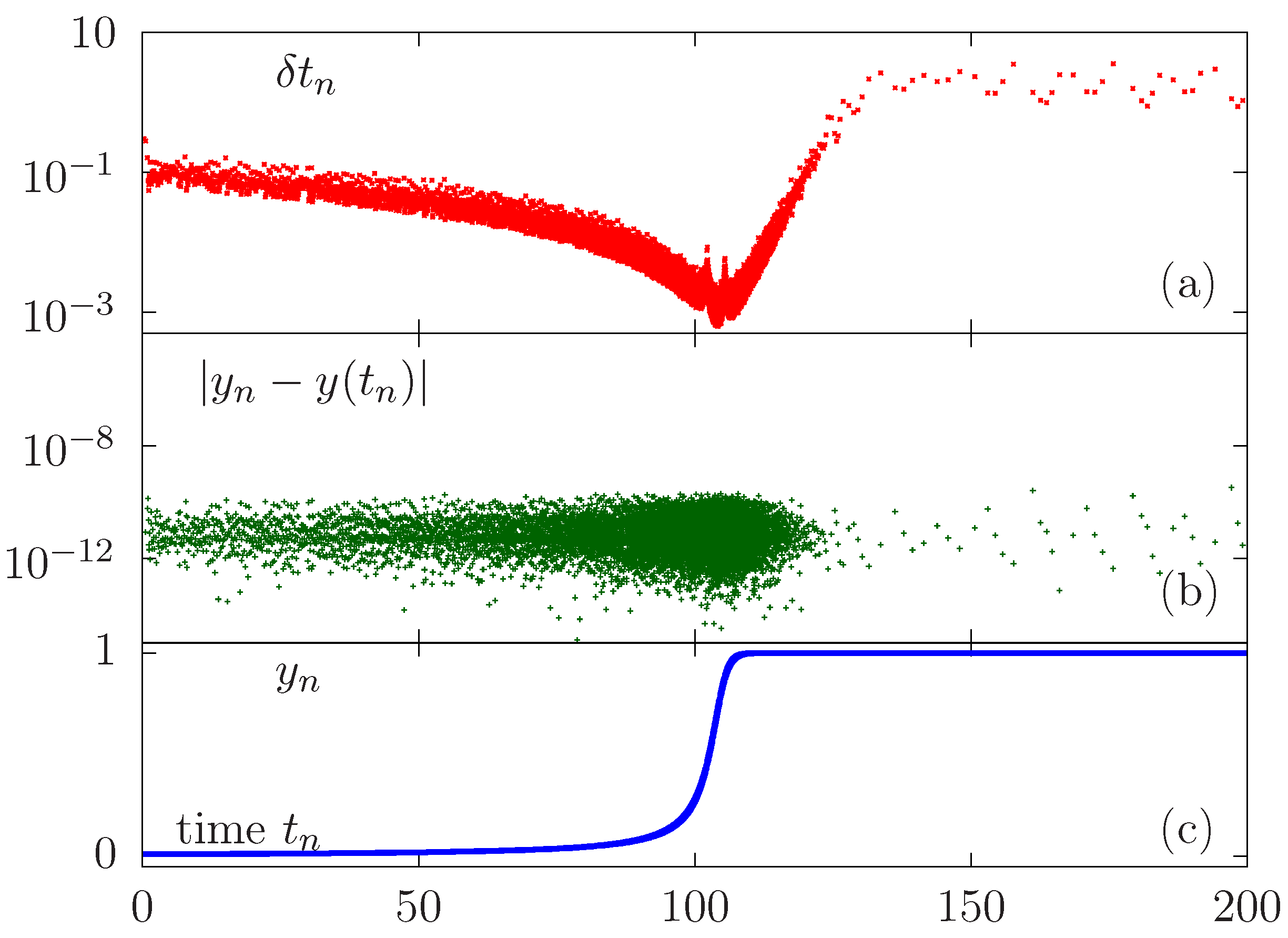
5.1. Example 1: One-Dimensional Test Case—Accuracy-Order Analysis
5.2. Example 2: Membrane Dynamics in a Newtonian Fluid under Simple Shear Flow
5.2.1. Tank-Treading Regime
5.2.2. Tumbling Regime
5.2.3. Calibration of the Penalty Parameter
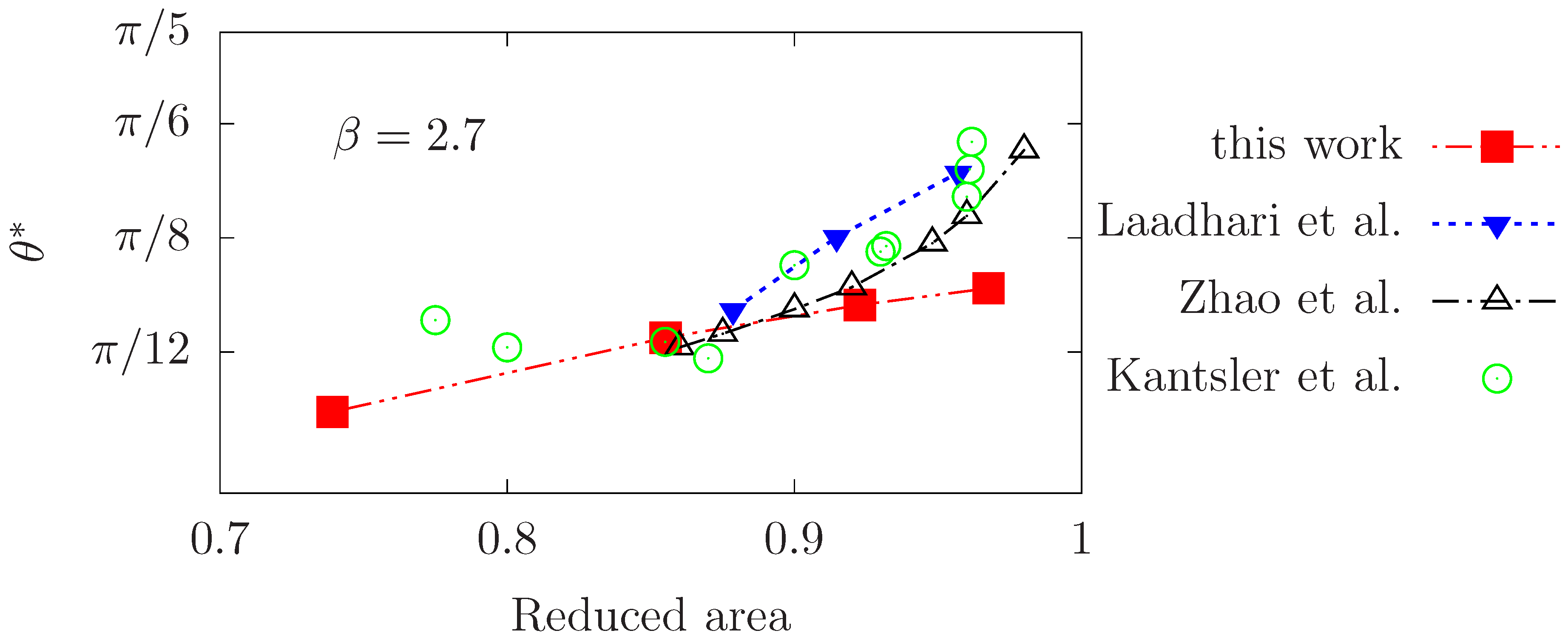
5.2.4. Quantitative Validation with Respect to Existing Results
5.3. Example 3: Membrane Dynamics in a Casson Shear Flow
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Note on the Composition Technique for the Level-Set Problem
References
- Connes, P.; Simmonds, M.J.; Brun, J.F.; Baskurt, O.K. Exercise hemorheology: Classical data, recent findings and unresolved issues. Clin. Hemorheol. Microcirc. 2013, 53, 187–199. [Google Scholar] [CrossRef]
- Fung, Y.C. Biomechanics, 2nd ed.; Springer: New York, NY, USA, 1993. [Google Scholar]
- Karaz, S.; Senses, E. Liposomes under Shear: Structure, Dynamics, and Drug Delivery Applications. Adv. NanoBiomed Res. 1998, 3, 2200101. [Google Scholar] [CrossRef]
- Thurston, G. Rheological parameters for the viscosity viscoelasticity and thixotropy of blood. Biorheology 1979, 16, 149–162. [Google Scholar] [CrossRef] [PubMed]
- Wajihah, S.A.; Sankar, D. A review on non-Newtonian fluid models for multi-layered blood rheology in constricted arteries. Arch. Appl. Mech. 2023, 93, 1771–1796. [Google Scholar] [CrossRef]
- Chien, S.; Usami, S.; Dellenback, R.; Gregersen, M. Shear-dependent deformation of erythrocytes in rheology of human blood. Am. J. Physiol. 1970, 219, 136–142. [Google Scholar] [CrossRef] [PubMed]
- Merrill, E.E.; Gilliland, E.R.; Cokelet, G.; Shin, H.; Britten, A.; Wells, R.E., Jr. Rheology of human blood, near and at zero flow. Effects of temperature and hematocrit level. Biophys. J. 1963, 3, 199–213. [Google Scholar] [CrossRef]
- Lai, M.C.; Li, Z. A remark on jump conditions for the three-dimensional Navier-Stokes equations involving an immersed moving membrane. Appl. Math. Lett. 2001, 14, 149–154. [Google Scholar] [CrossRef]
- Barrett, J.W.; Garcke, H.; Nurnberg, R. Numerical computations of the dynamics of fluidic membranes and vesicles. Phys. Rev. E 2015, 92, 052704. [Google Scholar] [CrossRef]
- Ayscough, S.E.; Clifton, L.A.; Skoda, M.W.; Titmuss, S. Suspended phospholipid bilayers: A new biological membrane mimetic. J. Colloid Interface Sci. 2023, 633, 1002–1011. [Google Scholar] [CrossRef]
- Noyhouzer, T.; L’Homme, C.; Beaulieu, I.; Mazurkiewicz, S.; Kuss, S.; Kraatz, H.B.; Canesi, S.; Mauzeroll, J. Ferrocene-Modified Phospholipid: An Innovative Precursor for Redox-Triggered Drug Delivery Vesicles Selective to Cancer Cells. Langmuir 2016, 32, 4169–4178. [Google Scholar] [CrossRef]
- Kaoui, B. Computer simulations of drug release from a liposome into the bloodstream. Eur. Phys. J. E 2018, 41, 20. [Google Scholar] [CrossRef] [PubMed]
- Elani, Y.; Law, R.V.; Ces, O. Vesicle-based artificial cells as chemical microreactors with spatially segregated reaction pathways. Nat. Commun. 2014, 5, 5305. [Google Scholar] [CrossRef]
- Seifert, U. Configurations of fluid membranes and vesicles. Adv. Phys. 1997, 46, 13–137. [Google Scholar] [CrossRef]
- Lipowsky, R.; Dimova, R. Introduction to remodeling of biomembranes. Soft Matter 2021, 17, 214–221. [Google Scholar] [CrossRef] [PubMed]
- Helfrich, W. Elastic properties of lipid bilayers: Theory and possible experiments. Z. Naturforschung C 1973, 28, 693–703. [Google Scholar] [CrossRef] [PubMed]
- Canham, P. The minimum energy of bending as a possible explanation of the biconcave shape of the human red blood cell. J. Theor. Biol. 1970, 26, 61–81. [Google Scholar] [CrossRef] [PubMed]
- Bassereau, P.; Sorre, B.; Lévy, A. Bending lipid membranes: Experiments after W. Helfrich’s model. Adv. Colloid Interface Sci. 2014, 208, 47–57. [Google Scholar] [CrossRef]
- Zhong-Can, O.Y.; Helfrich, W. Bending energy of vesicle membranes: General expressions for the first, second, and third variation of the shape energy and applications to spheres and cylinders. Phys. Rev. A 1989, 39, 5280–5288. [Google Scholar] [CrossRef]
- Laadhari, A.; Misbah, C.; Saramito, P. On the equilibrium equation for a generalized biological membrane energy by using a shape optimization approach. Phys. D 2010, 239, 1567–1572. [Google Scholar] [CrossRef]
- Kaoui, B.; Ristow, G.H.; Cantat, I.; Misbah, C.; Zimmermann, W. Lateral migration of a two-dimensional vesicle in unbounded Poiseuille flow. Phys. Rev. E 2008, 77, 021903. [Google Scholar] [CrossRef]
- Zhang, T.; Wolgemuth, C.W. A general computational framework for the dynamics of single- and multi-phase vesicles and membranes. J. Comput. Phys. 2022, 450, 110815. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Wolgemuth, C.W. Sixth-Order Accurate Schemes for Reinitialization and Extrapolation in the Level Set Framework. J. Sci. Comput. 2020, 83, 26. [Google Scholar] [CrossRef]
- Bui, C.; Lleras, V.; Pantz, O. Dynamics of red blood cells in 2d. ESAIM Proc. 2009, 28, 182–194. [Google Scholar] [CrossRef]
- Pozrikidis, C. Numerical simulation of the flow-induced deformation of red blood cells. Ann. Biomed. Eng. 2003, 31, 1194–1205. [Google Scholar] [CrossRef] [PubMed]
- Rahimian, A.; Veerapaneni, S.K.; Biros, G. Dynamic simulation of locally inextensible vesicles suspended in an arbitrary two-dimensional domain, a boundary integral method. J. Comput. Phys. 2010, 229, 6466–6484. [Google Scholar] [CrossRef]
- Dodson, W.R.; Dimitrakopoulos, P. Oscillatory tank-treading motion of erythrocytes in shear flows. Phys. Rev. E 2011, 84, 011913. [Google Scholar] [CrossRef]
- Krüger, T.; Varnik, F.; Raabe, D. Efficient and accurate simulations of deformable particles immersed in a fluid using a combined immersed boundary lattice Boltzmann finite element method. Comput. Math. Appl. 2011, 61, 3485–3505. [Google Scholar] [CrossRef]
- Bonito, A.; Nochetto, R.H.; Pauletti, M.S. Parametric FEM for geometric biomembranes. J. Comput. Phys. 2010, 229, 3171–3188. [Google Scholar] [CrossRef]
- Cottet, G.H.; Maitre, E.; Milcent, T. Eulerian formulation and Level-Set models for incompressible fluid-structure interaction. Math. Model. Numer. Anal. 2008, 42, 471–492. [Google Scholar] [CrossRef]
- Laadhari, A.; Saramito, P.; Misbah, C. Computing the dynamics of biomembranes by combining conservative level-set and adaptive finite element methods. J. Comput. Phys. 2014, 263, 328–352. [Google Scholar] [CrossRef]
- Laadhari, A. An operator splitting strategy for fluid-structure interaction problems with thin elastic structures in an incompressible Newtonian flow. Appl. Math. Lett. 2018, 81, 35–43. [Google Scholar] [CrossRef]
- Laadhari, A.; Szekely, G. Fully implicit finite element method for the modeling of free surface flows with surface tension effect. Int. J. Numer. Methods Eng. 2017, 111, 1047–1074. [Google Scholar] [CrossRef]
- Doyeux, V.; Guyot, Y.; Chabannes, V.; Prud’homme, C.; Ismail, M. Simulation of two-fluid flows using a finite element/level-set method. Application to bubbles and vesicle dynamics. J. Comput. Appl. Math. 2013, 246, 251–259. [Google Scholar] [CrossRef]
- Du, Q.; Liu, C.; Wang, X. A phase field approach in the numerical study of the elastic bending energy for vesicle membranes. J. Comput. Phys. 2004, 198, 450–468. [Google Scholar] [CrossRef]
- Valizadeh, N.; Rabczuk, T. Isogeometric analysis of hydrodynamics of vesicles using a monolithic phase-field approach. Comput. Methods Appl. Mech. Eng. 2022, 388, 114191. [Google Scholar] [CrossRef]
- Gera, P.; Salac, D. Modeling of multicomponent three-dimensional vesicles. Comput. Fluids 2018, 172, 362–383. [Google Scholar] [CrossRef]
- Osher, S.; Fedkiw, R.P. Level Set Methods: An Overview and Some Recent Results. J. Comput. Phys. 2001, 169, 463–502. [Google Scholar] [CrossRef]
- Laadhari, A. Implicit finite element methodology for the numerical modeling of incompressible two-fluid flows with moving hyperelastic interface. Appl. Math. Comput. 2018, 333, 376–400. [Google Scholar] [CrossRef]
- Laadhari, A. Exact Newton method with third-order convergence to model the dynamics of bubbles in incompressible flow. Appl. Math. Lett. 2017, 69, 138–145. [Google Scholar] [CrossRef]
- Laadhari, A.; Szekely, G. Eulerian finite element method for the numerical modeling of fluid dynamics of natural and pathological aortic valves. J. Comput. Appl. Math. 2017, 319, 236–261. [Google Scholar] [CrossRef]
- Seol, Y.; Tseng, Y.H.; Kim, Y.; Lai, M.C. An immersed boundary method for simulating Newtonian vesicles in viscoelastic fluid. J. Comput. Phys. 2019, 376, 1009–1027. [Google Scholar] [CrossRef]
- Izbassarov, D.; Muradoglu, M. A front-tracking method for computational modeling of viscoelastic two-phase flow systems. J. Non-Newton. Fluid Mech. 2015, 223, 122–140. [Google Scholar] [CrossRef]
- Suzuki, T.; Takao, H.; Suzuki, T.; Hataoka, S.; Kodama, T.; Aoki, K.; Otani, K.; Ishibashi, T.; Yamamoto, H.; Murayama, Y.; et al. Proposal of hematocrit-based non-Newtonian viscosity model and its significance in intracranial aneurysm blood flow simulation. J. Non-Newton. Fluid Mech. 2021, 290, 104511. [Google Scholar] [CrossRef]
- Gudiño, E.; Oishi, C.M.; Sequeira, A. Influence of non-Newtonian blood flow models on drug deposition in the arterial wall. J. Non-Newton. Fluid Mech. 2019, 274, 104206. [Google Scholar] [CrossRef]
- Blair, G.S. An equation for the flow of blood, plasma and serum through glass capillaries. Nature 1959, 183, 613–614. [Google Scholar] [CrossRef]
- Merrill, E.W.; Pelletier, G.A. Viscosity of human blood: Transition from Newtonian to non-Newtonian. J. Appl. Physiol. 1967, 23, 178–182. [Google Scholar] [CrossRef]
- Charm, S.; Kurland, G. Viscometry of human blood for shear rates of 0–100,000 sec−1. Nature 1965, 206, 617–618. [Google Scholar] [CrossRef]
- Casson, N. A Flow Equation for Pigment-oil Suspensions of the Printing Ink Type. In Rheology of Disperse Systems; Mills, C.C., Ed.; Pergamon Press: Oxford, UK, 1959; pp. 84–104. [Google Scholar]
- Fasano, A.; Sequeira, A. Hemomath, 1st ed.; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Papanastasiou, T.C. Flows of Materials with Yield. J. Rheol. 1987, 31, 385–404. [Google Scholar] [CrossRef]
- Fusi, L.; Calusi, B.; Farina, A.; Rosso, F. Stability of laminar viscoplastic flows down an inclined open channel. Eur. J. Mech. B/Fluids 2022, 95, 137–147. [Google Scholar] [CrossRef]
- Shahzad, H.; Wang, X.; Ghaffari, A.; Iqbal, K.; Hafeez, M.B.; Krawczuk, M.; Wojnicz, W. Fluid structure interaction study of non-Newtonian Casson fluid in a bifurcated channel having stenosis with elastic walls. Sci. Rep. 2022, 12, 12219. [Google Scholar] [CrossRef]
- Aghighi, M.S.; Ammar, A.; Metivier, C.; Gharagozlu, M. Rayleigh-Bénard convection of Casson fluids. Int. J. Therm. Sci. 2018, 127, 79–90. [Google Scholar] [CrossRef]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations; Springer Series in Computational Mathematics; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric numerical integration illustrated by the Störmer–Verlet method. Acta Numer. 2003, 12, 399–450. [Google Scholar] [CrossRef]
- Leimkuhler, B.; Reich, S. Simulating Hamiltonian Dynamics; Cambridge Monographs on Applied and Computational Mathematics; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar] [CrossRef]
- Cromer, A.H. Stable solutions using the Euler approximation. Am. J. Phys. 1981, 49, 455–459. [Google Scholar] [CrossRef]
- Yoshida, H. Construction of higher order symplectic integrators. Phys. Lett. A 1990, 150, 262–268. [Google Scholar] [CrossRef]
- McLachlan, R.I. On the Numerical Integration of Ordinary Differential Equations by Symmetric Composition Methods. SIAM J. Sci. Comput. 1995, 16, 151–168. [Google Scholar] [CrossRef]
- Blanes, S.; Casas, F.; Murua, A. Splitting and composition methods in the numerical integration of differential equations. Bol. Scc. Esp. Mat. Apl. 2008, 45, 89–145. [Google Scholar]
- Blanes, S.; Casas, F. A Concise Introduction to Geometric Numerical Integration, 1st ed.; Chapman and Hall/CRC: Boca Raton, FL, USA, 2016. [Google Scholar] [CrossRef]
- Casas, F.; Chartier, P.; Escorihuela-Tomàs, A.; Zhang, Y. Compositions of pseudo-symmetric integrators with complex coefficients for the numerical integration of differential equations. J. Comput. Appl. Math. 2021, 381, 113006. [Google Scholar] [CrossRef]
- Bickart, T.; Picel, Z. High order stiffly stable composite multistep methods for numerical integration of stiff differential equations. BIT Numer. Math. 1973, 13, 272–286. [Google Scholar] [CrossRef]
- Channell, P.J. Hybrid symplectic integrators for relativistic particles in electric and magnetic fields. Comput. Sci. Discov. 2014, 7, 015001. [Google Scholar] [CrossRef]
- Senyange, B.; Skokos, C. Computational efficiency of symplectic integration schemes: Application to multidimensional disordered Klein–Gordon lattices. Eur. Phys. J. Spec. Top. 2018, 227, 625–643. [Google Scholar] [CrossRef]
- Bader, P.; Blanes, S.; Casas, F.; Kopylov, N. Novel symplectic integrators for the Klein–Gordon equation with space- and time-dependent mass. J. Comput. Appl. Math. 2019, 350, 130–138. [Google Scholar] [CrossRef]
- Blanes, S.; Casas, F.; Farrés, A.; Laskar, J.; Makazaga, J.; Murua, A. New families of symplectic splitting methods for numerical integration in dynamical astronomy. Appl. Numer. Math. 2013, 68, 58–72. [Google Scholar] [CrossRef]
- Butusov, D.N.; Andreev, V.S.; Pesterev, D.O. Composition semi-implicit methods for chaotic problems simulation. In Proceedings of the 2016 XIX IEEE International Conference on Soft Computing and Measurements (SCM), St. Petersburg, Russia, 25–27 May 2016; pp. 107–110. [Google Scholar] [CrossRef]
- Deeb, A.; Razafindralandy, D.; Hamdouni, A. Performance of Borel-Padé-Laplace integrator for the solution of stiff and non-stiff problems. Appl. Math. Comput. 2022, 426, 127118. [Google Scholar] [CrossRef]
- Deeb, A.; Razafindralandy, D.; Hamdouni, A. Comparison between Borel-Padé summation and factorial series, as time integration methods. Discrete Contin. Dyn. Syst. Ser. S 2016, 9, 393–408. [Google Scholar] [CrossRef]
- Hairer, E.; Nørsett, S.P.; Wanner, G. Solving Ordinary Differential Equations I: Nonstiff Problems, 2nd ed.; Springer Series in Computational Mathematics Vol 1; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Sunday, J.; Shokri, A.; Kwanamu, J.A.; Nonlaopon, K. Numerical Integration of Stiff Differential Systems Using Non-Fixed Step-Size Strategy. Symmetry 2022, 14, 1575. [Google Scholar] [CrossRef]
- Evans, E.A. Bending Resistance and Chemically Induced Moments in Membrane Bilayers. Biophys. J. 1974, 14, 923–931. [Google Scholar] [CrossRef]
- Deuling, H.; Helfrich, W. Red blood cell shapes as explained on the basis of curvature elasticity. Biophys. J. 1976, 16, 861–868. [Google Scholar] [CrossRef]
- Laadhari, A.; Saramito, P.; Misbah, C.; Székely, G. Fully implicit methodology for the dynamics of biomembranes and capillary interfaces by combining the Level Set and Newton methods. J. Comput. Phys. 2017, 343, 271–299. [Google Scholar] [CrossRef]
- Shibeshi, S.S.; Collins, W.E. The Rheology of Blood Flow in a Branched Arterial System. Appl. Rheol. 2005, 15, 398–405. [Google Scholar] [CrossRef]
- Calusi, B.; Farina, A.; Fusi, L.; Rosso, F. Long-wave instability of a regularized Bingham flow down an incline. Phys. Fluids 2022, 34, 137–147. [Google Scholar] [CrossRef]
- Suzuki, M. Fractal decomposition of exponential operators with applications to many-body theories and Monte Carlo simulations. Phys. Lett. A 1990, 146, 319–323. [Google Scholar] [CrossRef]
- Iserles, A. A First Course in the Numerical Analysis of Differential Equations, 2nd ed.; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Donelson, J., III; Hansen, E. Cyclic Composite Multistep Predictor-Corrector Methods. SIAM J. Numer. Anal. 1971, 8, 137–157. [Google Scholar] [CrossRef]
- Tendler, J.M.; Bickart, T.A.; Picel, Z. A stiffly stable integration process using cyclic composite methods. ACM Trans. Math. Softw. 1978, 4, 339–368. [Google Scholar] [CrossRef]
- Salac, D.; Miksis, M. Reynolds number effects on lipid vesicles. J. Fluid Mech. 2012, 711, 122–146. [Google Scholar] [CrossRef]
- Janela, J.; Lefebvre, A.; Maury, B. A penalty method for the simulation of fluid—Rigid body interaction. ESAIM Proc. 2005, 14, 115–123. [Google Scholar] [CrossRef]
- Brooks, A.N.; Hughes, T.J. Streamline upwind/Petrov–Galerkin formulations for convection dominated flows with particular emphasis on the incompressible Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 1982, 32, 199–259. [Google Scholar] [CrossRef]
- Loch, E. The Level Set Method for Capturing Interfaces with Applications in Two-Phase Flow Problems. Ph.D. Thesis, Aachen University, Aachen, Germany, 2013. [Google Scholar]
- Alnaes, M.; Blechta, J.; Hake, J.; Johansson, A.; Kehlet, B.; Logg, A.; Richardson, C.; Ring, J.; Rognes, M.E.; Wells, G.N. The FEniCS Project Version 1.5. Arch. Numer. Softw. 2015, 3, 9–23. [Google Scholar]
- Kraus, M.; Wintz, W.; Seifert, U.; Lipowsky, R. Fluid vesicles in shear flow. Phys. Rev. Lett. 1996, 77, 3685. [Google Scholar] [CrossRef]
- Zhao, H.; Shaqfeh, E.S.G. The dynamics of a vesicle in simple shear flow. J. Fluid Mech. 2011, 674, 578–604. [Google Scholar] [CrossRef]
- Kantsler, V.; Steinberg, V. Transition to Tumbling and Two Regimes of Tumbling Motion of a Vesicle in Shear Flow. Phys. Rev. Lett. 2006, 96, 036001. [Google Scholar] [CrossRef]
- Beaucourt, J.; Rioual, F.; Séon, T.; Biben, T.; Misbah, C. Steady to unsteady dynamics of a vesicle in a flow. Phys. Rev. E 2004, 69, 011906. [Google Scholar] [CrossRef] [PubMed]
- Keller, S.R.; Skalak, R. Motion of a tank-treading ellipsoidal particle in a shear flow. J. Fluid Mech. 1982, 120, 27–47. [Google Scholar] [CrossRef]
- Laadhari, A.; Barral, Y.; Székely, G. A data-driven optimal control method for endoplasmic reticulum membrane compartmentalization in budding yeast cells. In Mathematical Methods in the Applied Sciences; Wiley Online Library: Hoboken, NJ, USA, 2023. [Google Scholar] [CrossRef]
- Gizzi, A.; Ruiz-Baier, R.; Rossi, S.; Laadhari, A.; Cherubini, C.; Filippi, S. A Three-dimensional Continuum Model of Active Contraction in Single Cardiomyocytes. In Modeling the Heart and the Circulatory System; Springer International Publishing: Cham, Switzerland, 2015; pp. 157–176. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 20 | 40 | 80 | 160 | 320 | 720 | |
| 1.65 | 1.83 | 1.92 | 1.96 | 1.98 | 1.99 | |
| 2.777 | 2.925 | 2.975 | 2.991 | 2.996 | 2.998 |
| 0.0022 | 0.021 | 0.0138 | 0.0082 | 0.03692 | 0.0512 | 0.0675 | |
| 0.036 | 0.0013 | 0.0027 | 0.0057 | 0.0199 | 0.0309 | 0.0458 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laadhari, A.; Deeb, A. Computational Modeling of Individual Red Blood Cell Dynamics Using Discrete Flow Composition and Adaptive Time-Stepping Strategies. Symmetry 2023, 15, 1138. https://doi.org/10.3390/sym15061138
Laadhari A, Deeb A. Computational Modeling of Individual Red Blood Cell Dynamics Using Discrete Flow Composition and Adaptive Time-Stepping Strategies. Symmetry. 2023; 15(6):1138. https://doi.org/10.3390/sym15061138
Chicago/Turabian StyleLaadhari, Aymen, and Ahmad Deeb. 2023. "Computational Modeling of Individual Red Blood Cell Dynamics Using Discrete Flow Composition and Adaptive Time-Stepping Strategies" Symmetry 15, no. 6: 1138. https://doi.org/10.3390/sym15061138