
The Optimal Deployment Strategy of Mega-Constellation Based on Markov Decision Process
Abstract
:1. Introduction
2. Space Orbital Debris Flux and Collision Probability
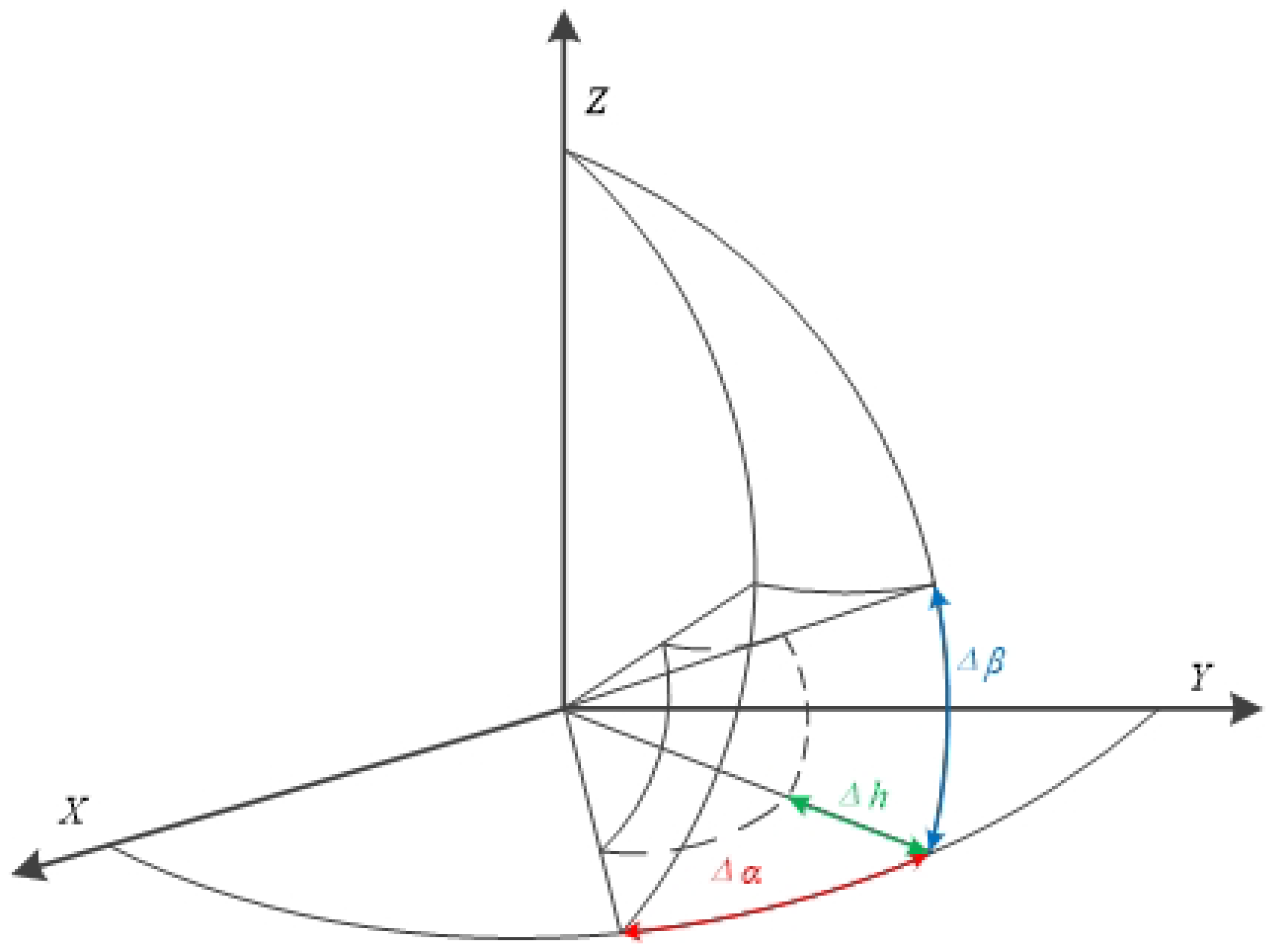
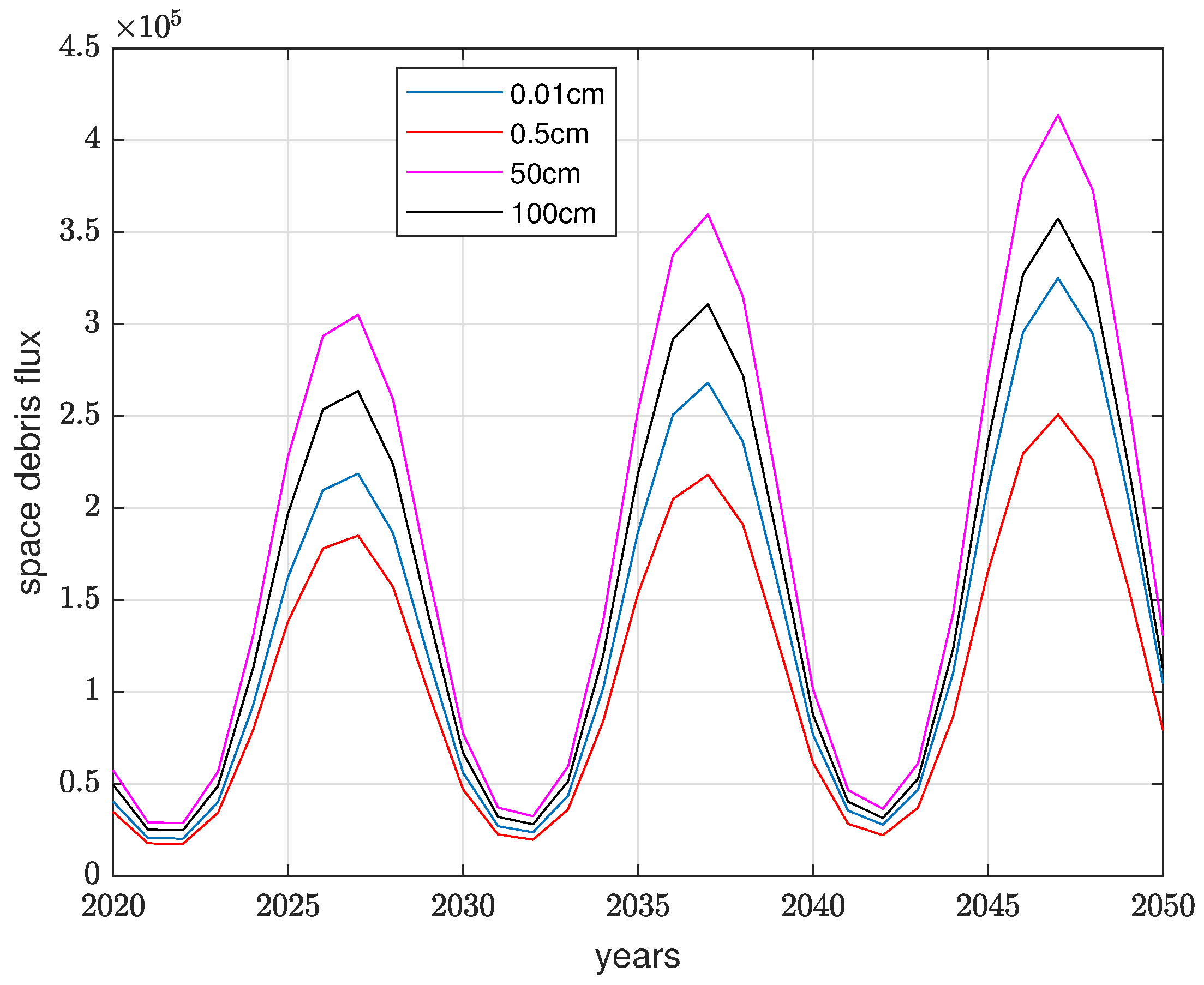
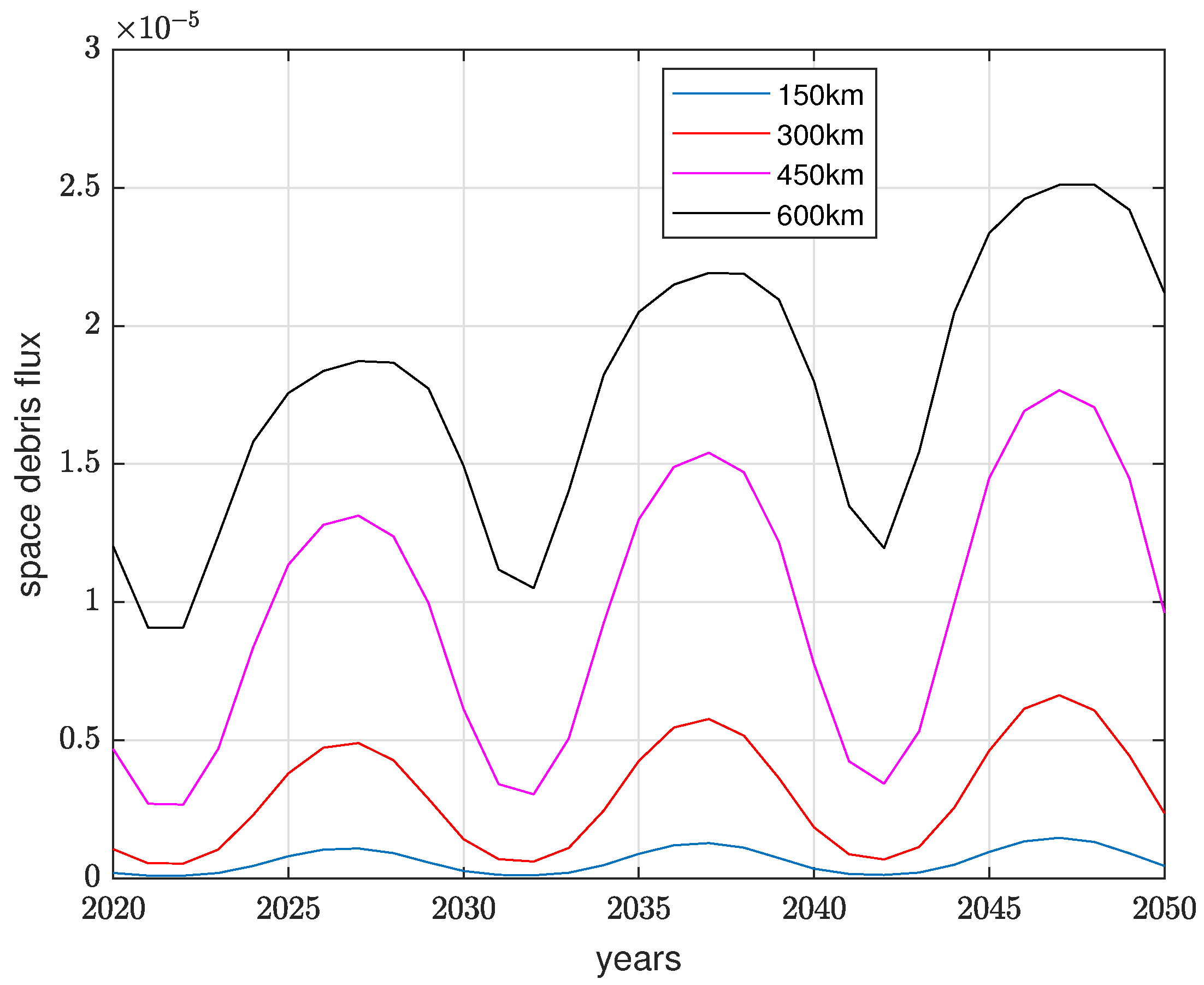
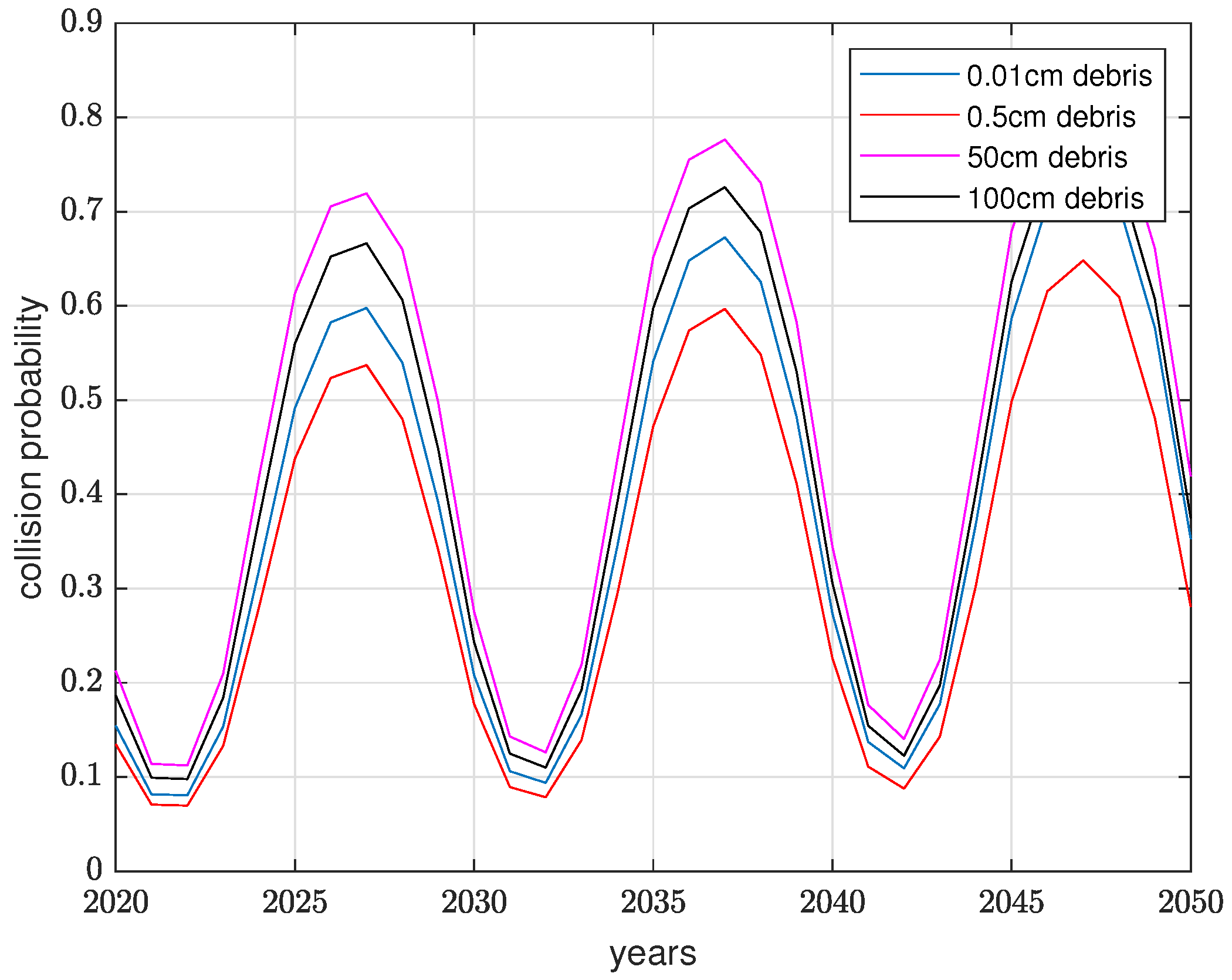
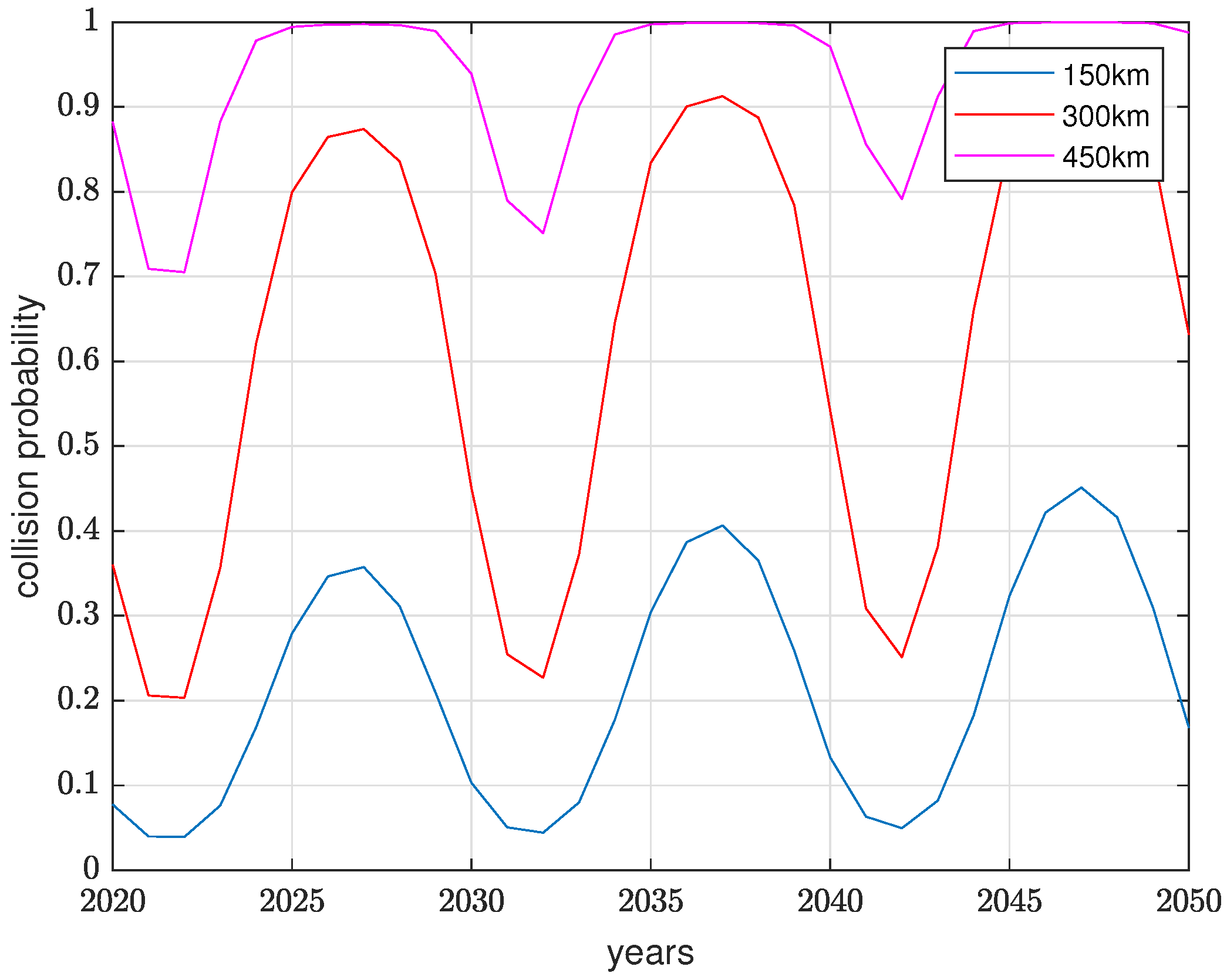
2.1. Space Orbital Debris Flux
2.2. Collision Probability Analysis
3. Markov Process of Staged Deployment
3.1. Definitions of Staged Strategy State Variables
3.2. Cost-Effectiveness Analysis of Deployment Strategy
4. Case Study
4.1. Parameters of Simulation Model
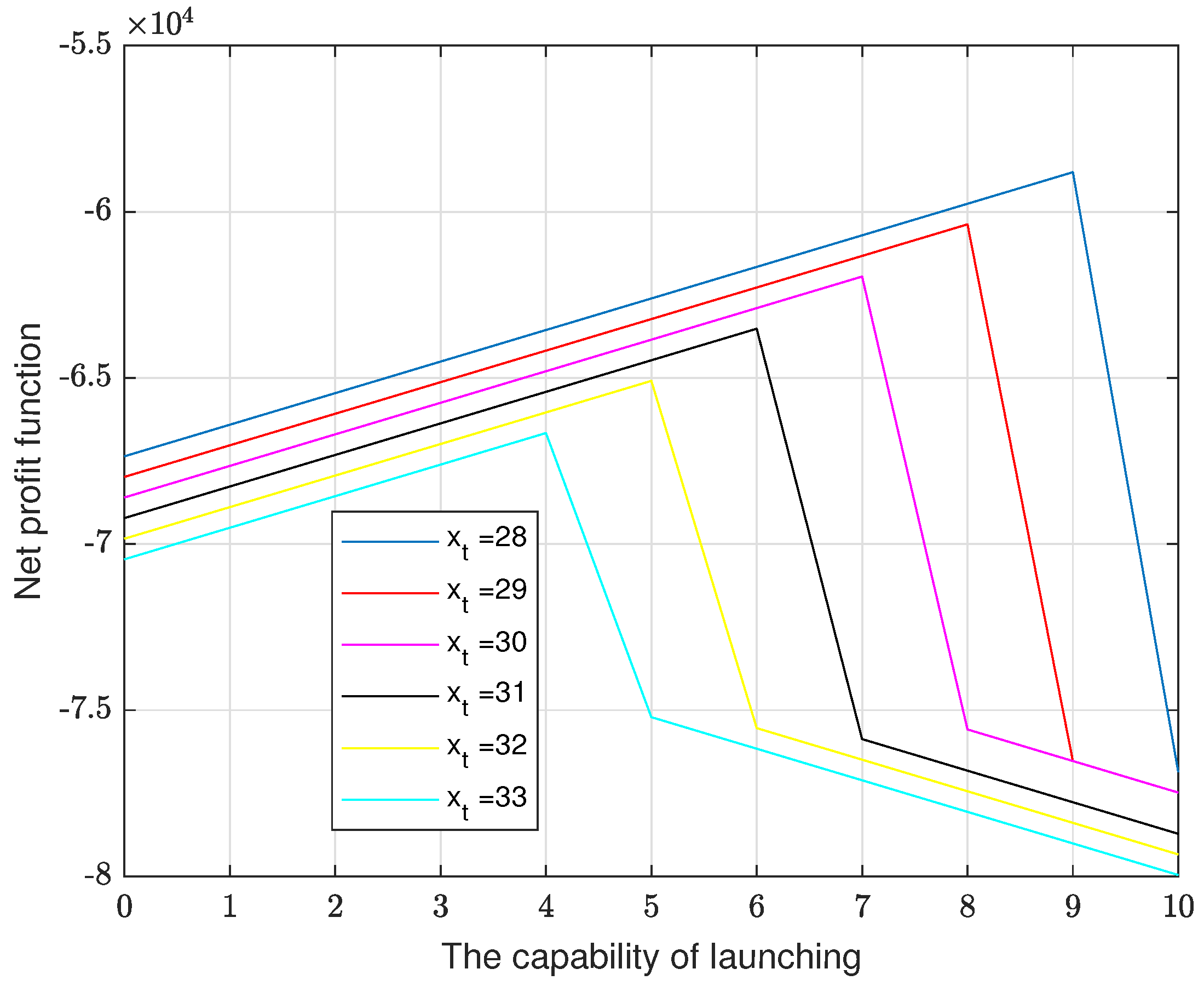
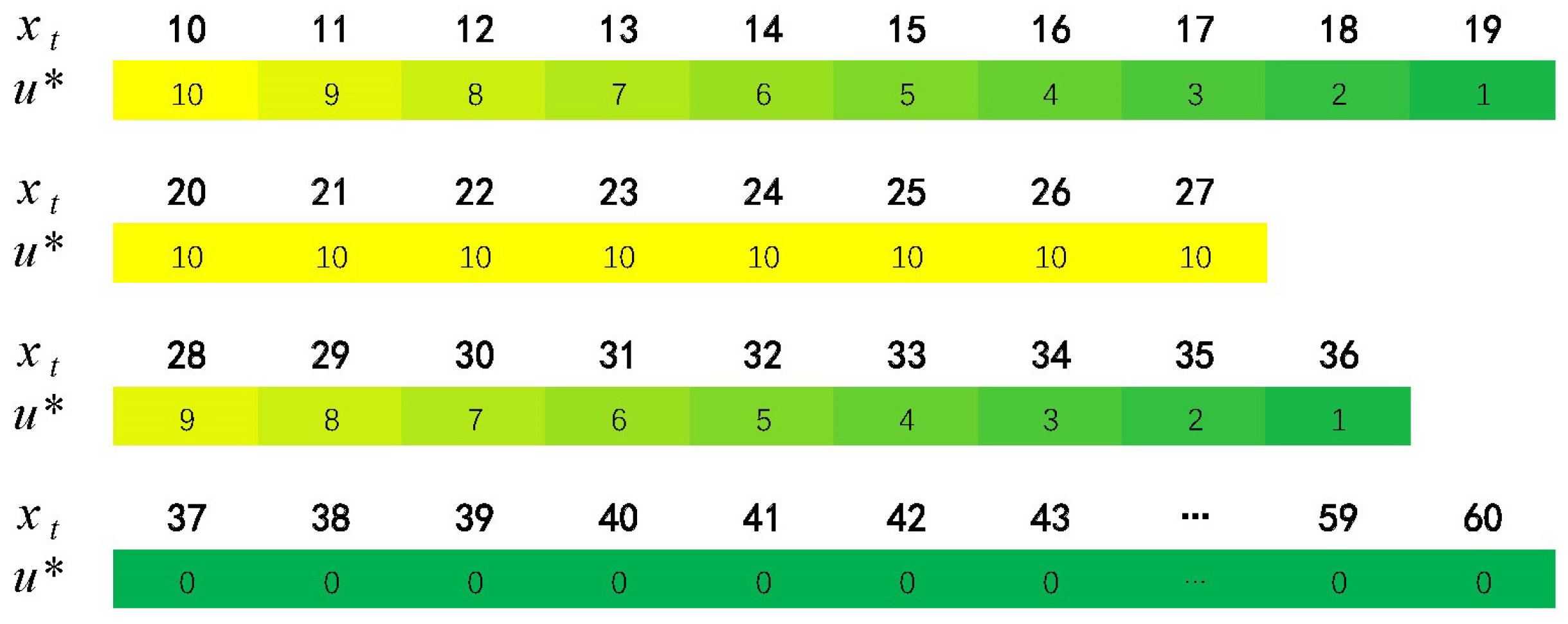
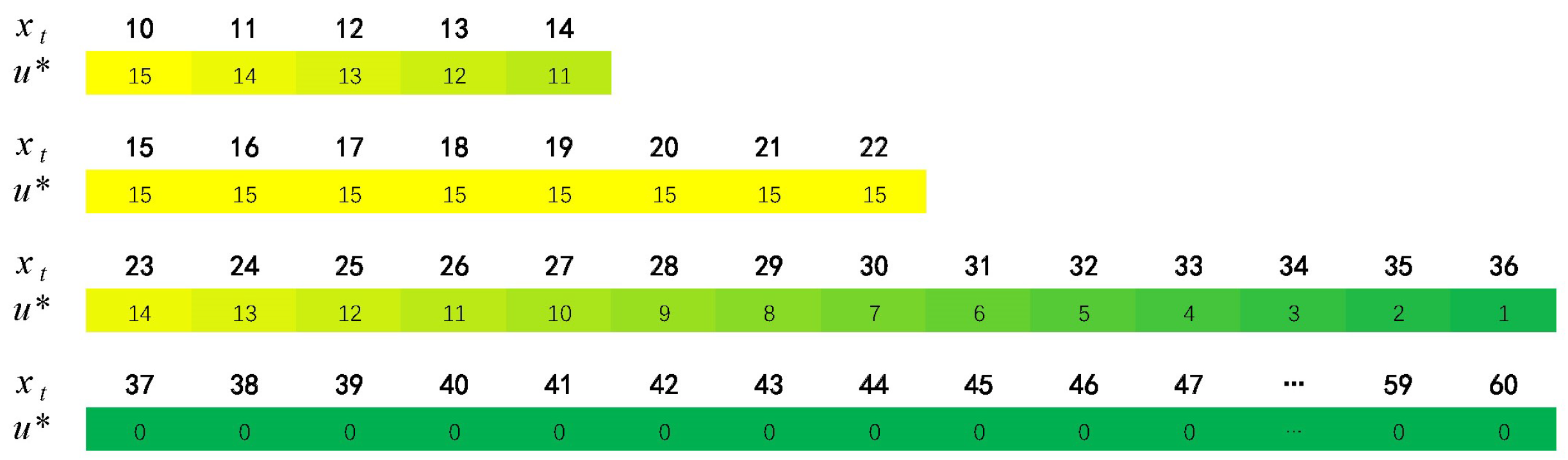
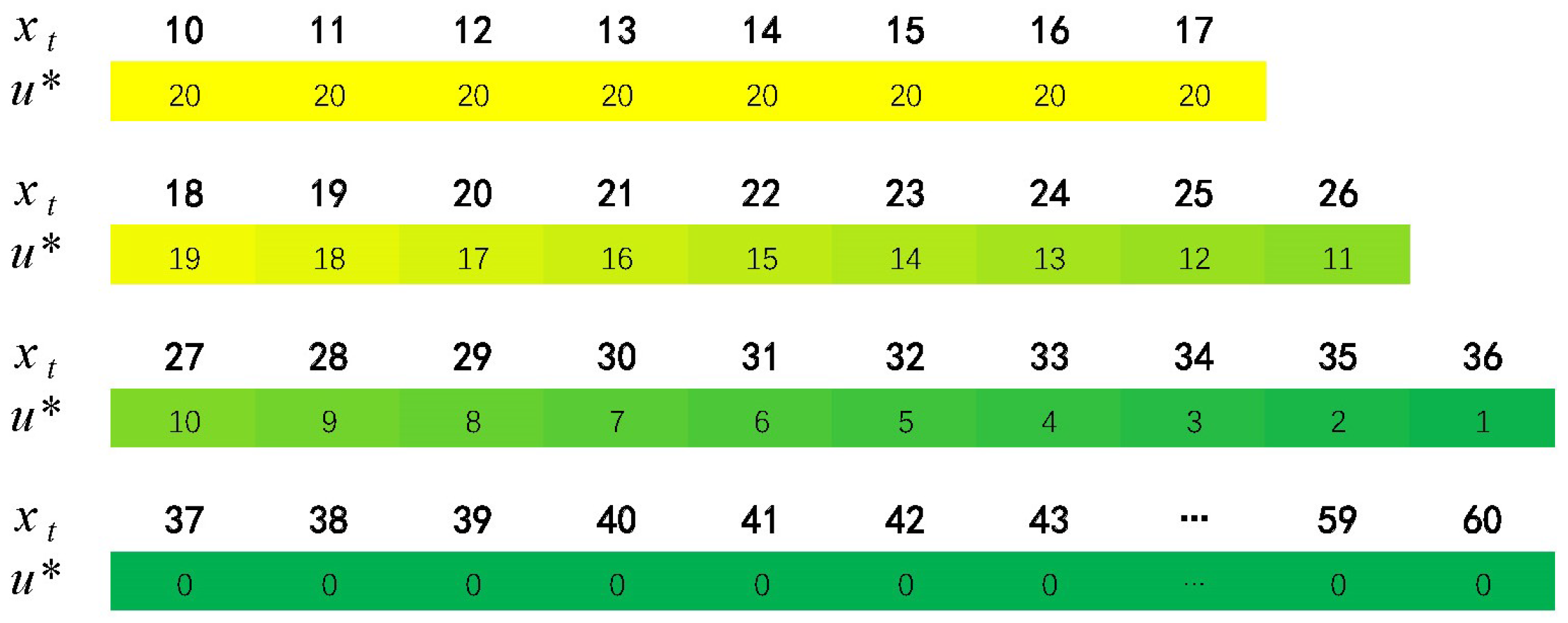
- 10∼19 satellites on-orbit operation. Given the boundary condition, the system could not provide a service in this stage. For the next deployment to progress successfully, 10 satellites would be launched at most, considering each cost item;
- 20∼27 satellites on-orbit operation. By reason of a malfunction such as collision and some faults, more satellites need to be launched into orbit for backups and the maximum capability of launching would be taken full advantage in this scenario;
- 28∼36 satellites on-orbit operation. Based on the last scenario, the optimal decision assures 37 satellites on-orbit. For maximizing the net profit function, there is an incremental reduction during the deployment stages;
- 37∼60 satellites on-orbit operation. Satellites could not be launched anymore because the system would provide services and launching costs would not be covered by the system benefits.
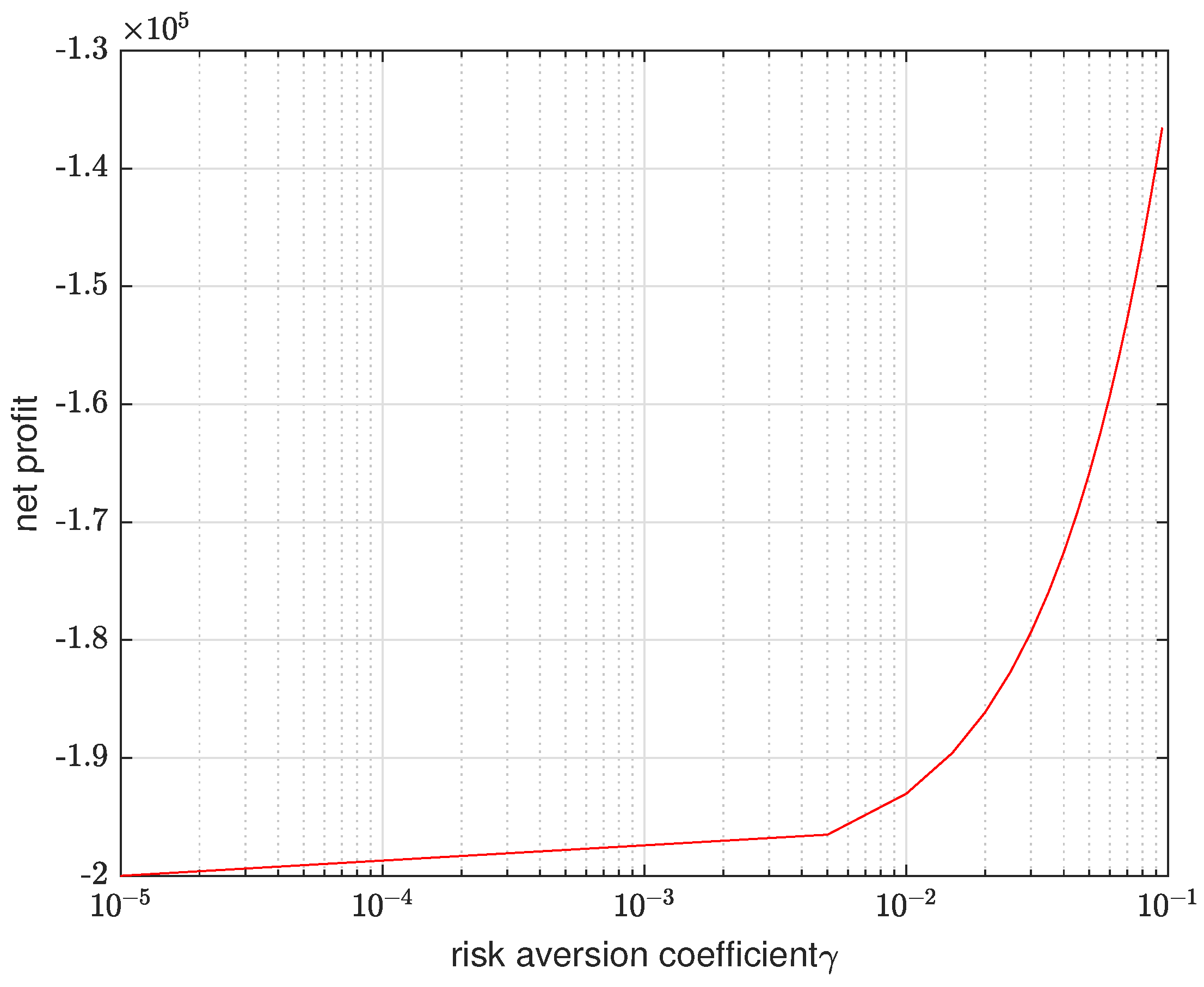
4.2. Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Giordani, M.; Zorzi, M. Non-terrestrial networks in the 6G era: Challenges and opportunities. IEEE Netw. 2021, 35, 244–251. [Google Scholar] [CrossRef]
- Portillo, I.; Cameron, B.; Crawley, E. A technical comparison of three low earth orbit satellite constellation systems to provide global broadband. Acta Astronaut. 2019, 159, 123–135. [Google Scholar] [CrossRef]
- Navabi, M.; Hamrah, R. Close approach analysis of space objects and estimation of satellite-debris collision probability. Aircr. Eng. Aerosp. Technol. Int. J. 2015, 87, 483–492. [Google Scholar] [CrossRef]
- Shi, K.; Liu, C.; Sun, Z. Coupled Orbit-Attitude Dynamics and Trajectory Tracking Control for Spacecraft Electromagnetic Docking. Appl. Math. Model. 2022, 101, 553–572. [Google Scholar] [CrossRef]
- Liu, C.; Yue, X.; Zhang, J. Active Disturbance Rejection Control for Delayed Electromagnetic Docking of Spacecraft in Elliptical Orbits. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2257–2268. [Google Scholar] [CrossRef]
- Liu, C.; Yue, X.; Shi, K. Spacecraft Attitude Control: A Linear Matrix Inequality Approach, 1st ed.; Science Press: Beijing, China, 2022; pp. 15–27. [Google Scholar]
- McKnight, D.; Pentino, F. New insights on the orbital debris collision hazard at GEO. Acta Astronaut. 2013, 85, 73–82. [Google Scholar] [CrossRef]
- Shajiee, S. Probability of collision and risk minimization of orbital debris on the Galileo satellite constellation. In Proceedings of the 54th International Astronautical Congress of the International Astronautical Federation, the International Academy of Astronautics, and the International Institute of Space Law, Bremen, Germany, 29 September–3 October 2004. [Google Scholar]
- May, S.; Gehly, S.; Carter, B. Space debris collision probability analysis for proposed global broadband constellations. Acta Astronaut. 2018, 151, 445–455. [Google Scholar] [CrossRef]
- Liu, M.; Zhu, Z. Simulation of collision probability between space station and space debris and structure failure probability. Int. J. Space Sci. Eng. 2017, 4, 253–269. [Google Scholar] [CrossRef]
- Torky, M.; Hassanein, A.; Fiky, A. Analyzing space debris flux and predicting satellites collision probability in LEO orbits based on Petri nets. IEEE Access 2019, 7, 83461–83473. [Google Scholar] [CrossRef]
- Fleischmann, M.; Kuik, R. On optimal inventory control with independent stochastic item returns. Eur. J. Oper. Res. 2003, 151, 25–37. [Google Scholar] [CrossRef]
- Bergamini, E.; Jacobone, F.; Morea, D. The Increasing Risk of Space Debris Impact on Earth: Case Studies, Potential Damages, International Liability Framework and Management Systems. In Enhancing CBRNE Safety & Security: Proceedings of the SICC 2017 Conference: Science as the First Countermeasure for CBRNE and Cyber Threats, Rome, Italy, 4 October 2018; Springer International Publishing: Berlin, Germany, 2018. [Google Scholar]
- Johnson, L. Orbital debris: The growing threat to space operations. In Proceedings of the 33rd Annual Guidance and Control Conference, Huston, TX, USA, 25 August 2013. [Google Scholar]
- Johnson, L. Instability of the present LEO satellite populations. Adv. Space Res. 2008, 41, 1046–1053. [Google Scholar]
- Pardini, C.; Anselmo, L. Review of past on-orbit collisions among cataloged objects and examination of the catastrophic fragmentation concept. Acta Astronaut. 2014, 100, 30–39. [Google Scholar] [CrossRef]
- Pardini, C.; Anselmo, L. Revisiting the collision risk with cataloged objects for the Iridium and COSMO-SkyMed satellite constellations. Acta Astronaut. 2017, 134, 23–32. [Google Scholar] [CrossRef]
- Lewis, H.; Radtke, J.; Rossi, A. Sensitivity of the space debris environment to large constellations and small satellites. J. Br. Interplanet. Soc. 2017, 70, 105–117. [Google Scholar]
- Virgili, B.; Krag, H.; Lewis, H. Mega-constellations, small satellites and their impact on the space debris environment. In Proceedings of the 67th International Astronautical Congress, Guadalajara, Mexico, 10 August 2016. [Google Scholar]
- Pereira, H.; Marques, C. An analytical review of irrigation efficiency measured using deterministic and stochastic models. Agric. Water Manag. 2017, 184, 28–35. [Google Scholar] [CrossRef]
- Wagner, R.; Radovilsky, Z. Optimizing boat resources at the US Coast Guard: Deterministic and stochastic models. Oper. Res. 2012, 60, 1035–1049. [Google Scholar] [CrossRef]
- Budianto, A.; Olds, R. Design and deployment of a satellite constellation using collaborative optimization. J. Spacecr. Rocket. 2004, 41, 956–963. [Google Scholar] [CrossRef]
- De Weck, O.; De Neufville, R.; Chaize, M. Staged deployment of communications satellite constellations in low earth orbit. J. Aerosp. Comput. Inform. Commun. 2004, 1, 119–136. [Google Scholar] [CrossRef]
- Gökbayrak, E.; Kayış, E. Single item periodic review inventory control with sales dependent stochastic return flows. Int. J. Prod. Econ. 2023, 255, 108699–108707. [Google Scholar] [CrossRef]
- Baeza, V.; Lagunas, E.; Al-Hraishawi, H.; Chatzinotas, S. An Overview of Channel Models for NGSO Satellites. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference, London, UK, 26 September 2022. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scale Range | Orbital Debris | Detriments and Influence |
|---|---|---|
| More than 1 cm | Big debris | Orbit changed; Structure damaged; Mission failed |
| Less than 1 cm | Small debris | Payload hurt; Performance degraded; Life shortened |
| 0 | |||
| 1 | |||
| 2 |
| The Solving Process of Net Profit Function |
|---|
| 1: Set |
| 2: For , |
| 3: Find and finish solving |
| 0 | 0.4431 | 0.1053 | 0.4516 |
| 1 | 0.2483 | 0.0156 | 0.7361 |
| 2 | 0.0672 | 0.1693 | 0.7635 |
| Collision Probability | |
|---|---|
| State | Collision Probability | Value |
|---|---|---|
| decreased | ||
| maintained | ||
| increased |
| State | Collision Probability |
|---|---|
| ⋮ | ⋮ |
| Parameters | Value | Parameter | Value |
|---|---|---|---|
| 50,000 | 50,000 | ||
| 600 | 350 | ||
| 600 | 30 |
| Scenarios | 10 Satellites Launched | 15 Satellites Launched | 20 Satellites Launched |
|---|---|---|---|
| Scenario 1 | 10–19 10–1 | 10–14 15–11 | 10–17 20 |
| Scenario 2 | 20–27 10 | 15–22 15 | 18–36 19–1 |
| Scenario 3 | 28–36 9–1 | 23–36 14–1 | - |
| Scenario 4 | ≥37 0 | ≥37 0 | ≥37 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhang, S.; Zhang, H. The Optimal Deployment Strategy of Mega-Constellation Based on Markov Decision Process. Symmetry 2023, 15, 1024. https://doi.org/10.3390/sym15051024
Wang X, Zhang S, Zhang H. The Optimal Deployment Strategy of Mega-Constellation Based on Markov Decision Process. Symmetry. 2023; 15(5):1024. https://doi.org/10.3390/sym15051024
Chicago/Turabian StyleWang, Xuefeng, Shijie Zhang, and Hongzhu Zhang. 2023. "The Optimal Deployment Strategy of Mega-Constellation Based on Markov Decision Process" Symmetry 15, no. 5: 1024. https://doi.org/10.3390/sym15051024