
A Novel Second-OrderSine-Cost-Function-Derived Kernel Adaptive Algorithm for Non-Linear System Identification


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The KRSOSA Algorithm
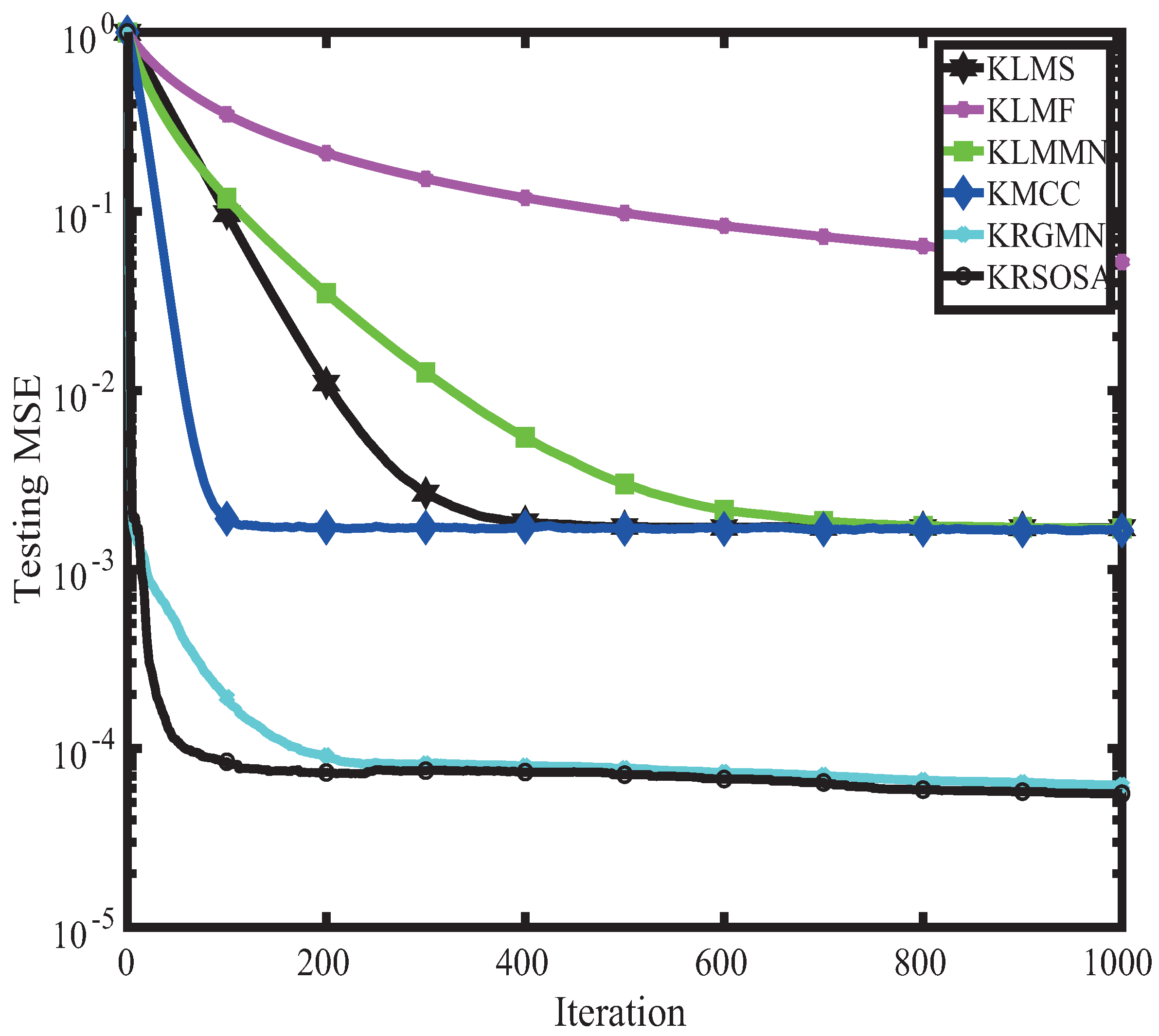
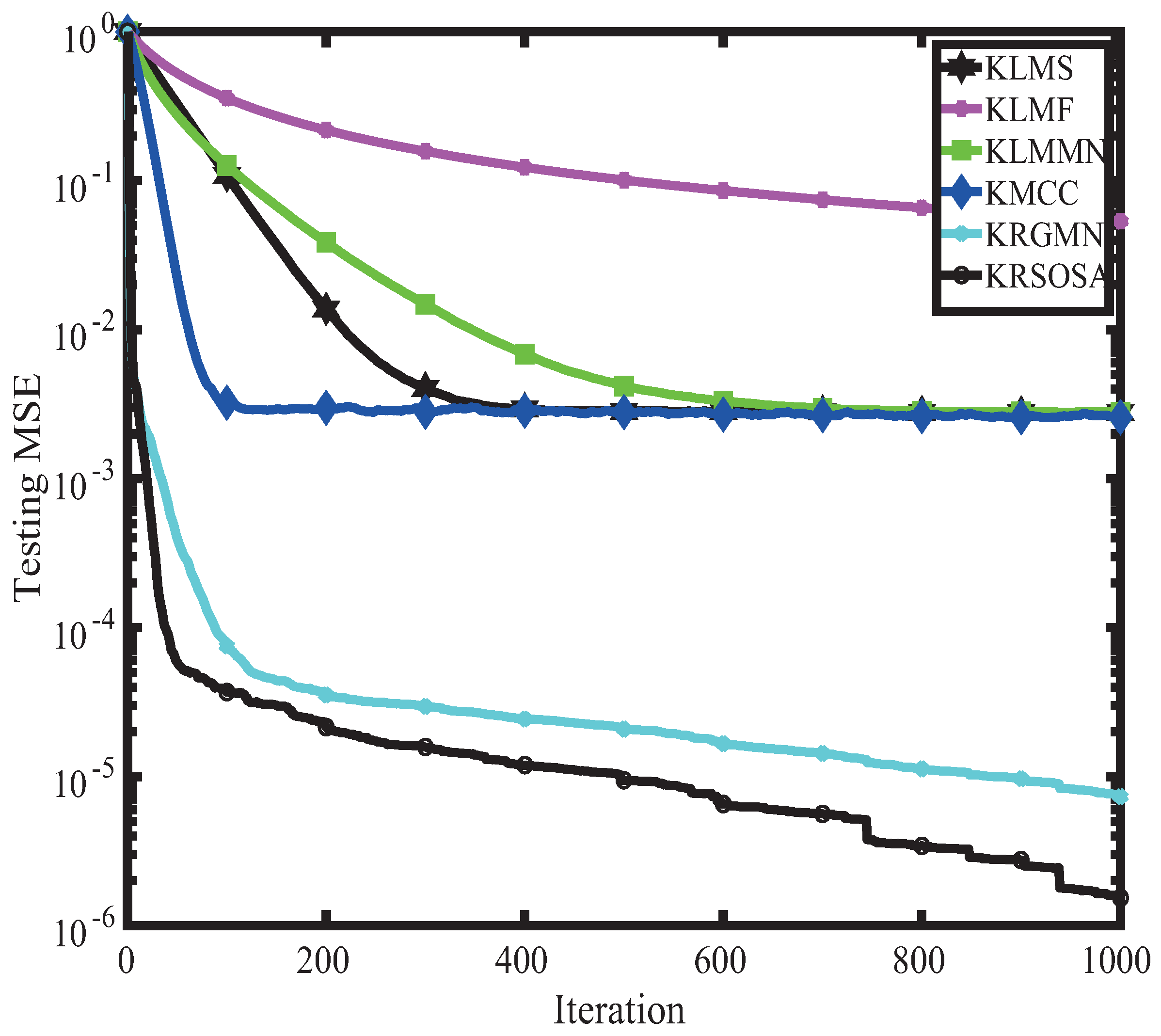
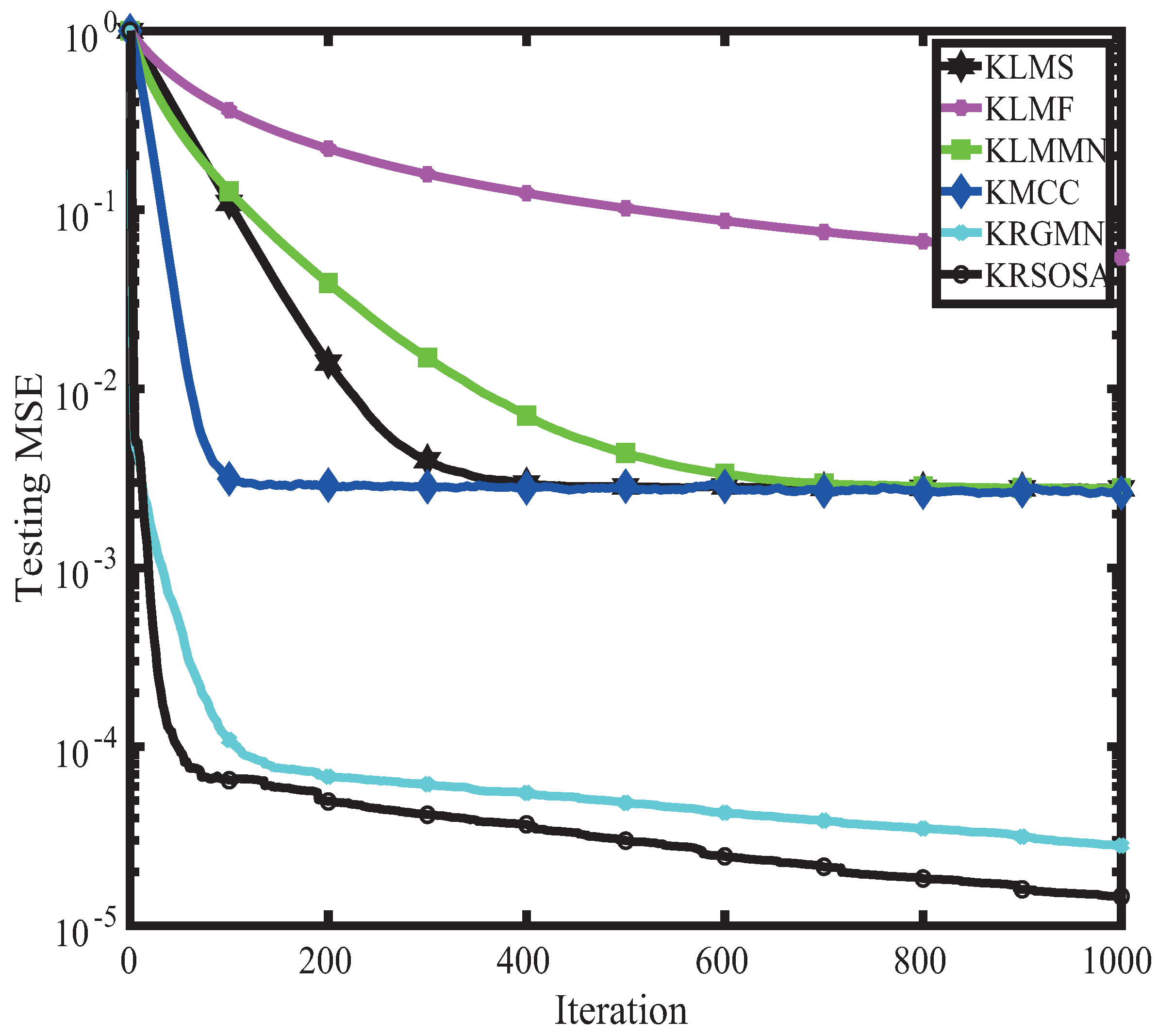
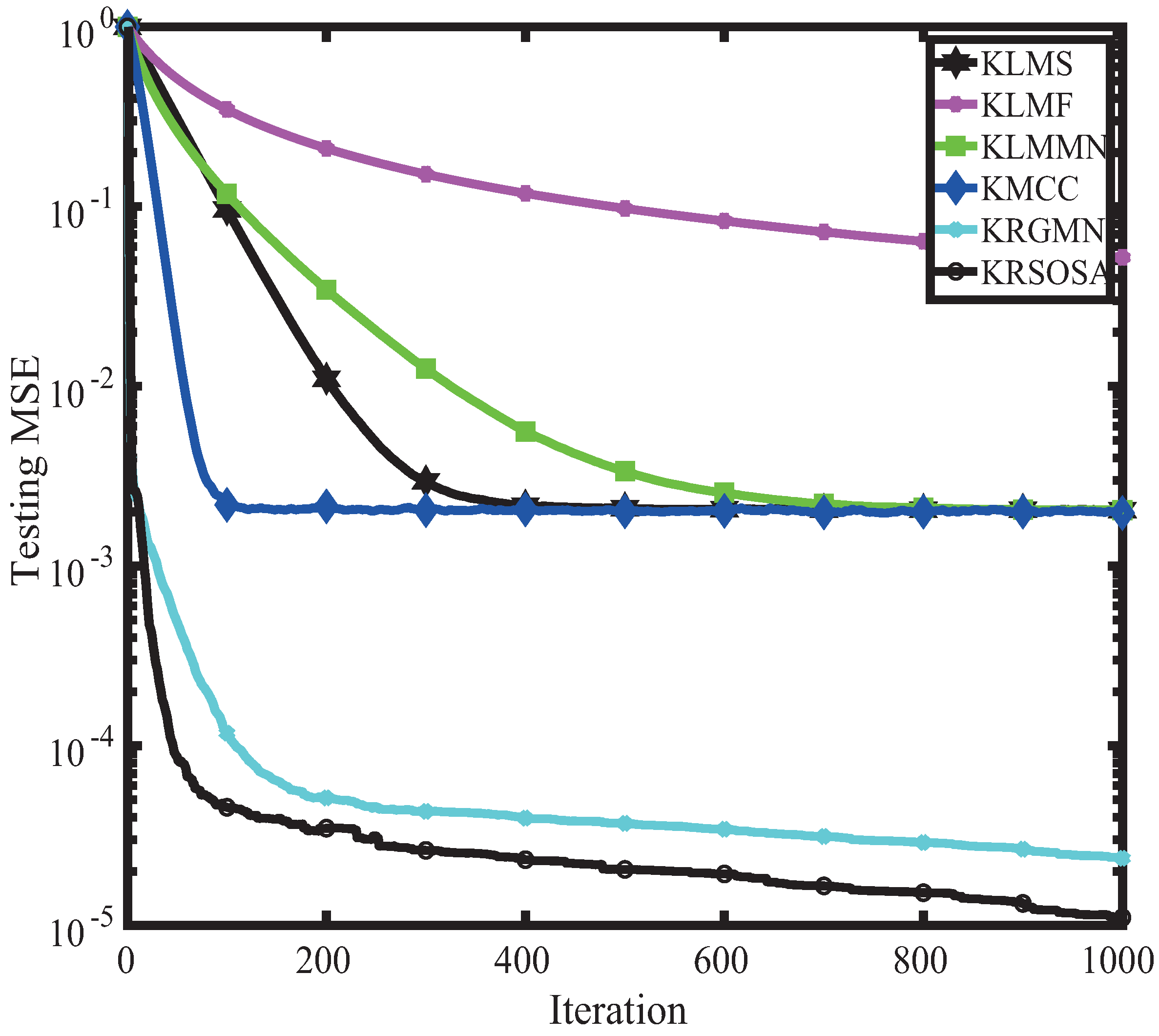
3. Simulation Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| KRSOSA | kernel recursive second-order sine adaptive |
| KAF | kernel adaptive filtering |
| KAA | kernel adaptive algorithm |
| RKHS | reproducing kernel Hilbert space |
| KLMS | kernel-driven least mean squares |
| KLMF | kernel-driven least mean fourth |
| KRLS | kernel-driven recursive least squares |
| KLMMN | kernel-driven least mean mixed norm |
| KMCC | kernel-driven maximum correntropy criterion |
| KRGMN | kernel-driven recursive generalization mixed norm |
| NCE | non-linear channel estimation |
| MSE | mean squared error |
References
- Gui, G.; Adachi, F. Improved least mean square algorithm with application to adaptive sparse channel estimation. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 204. [Google Scholar]
- Guo, K.; Guo, L.; Li, Y.; Zhang, L.; Dai, Z.; Yin, J. Efficient DOA Estimation Based on Variable Least Lncosh Algorithm under Impulsive Noise interferences. Digit. Signal Process. 2022, 122, 103383. [Google Scholar]
- Shi, W.; Li, Y. A p-norm-like constraint LMS algorithm for sparse adaptive beamforming. Appl. Comput. Electromagn. Soc. J. 2019, 34, 1797–1803. [Google Scholar]
- Steinbuch, K.; Widrow, B. A Critical Comparison of Two Kinds of Adaptive Classification Networks. IEEE Trans. Electron. Comput. 1965, 14, 737–740. [Google Scholar] [CrossRef] [Green Version]
- Geladi, P.; Kowalski, B.R. Partial least-squares regression: A tutorial. Anal. Chim. Acta 1986, 185, 1–17. [Google Scholar]
- Diniz, P.S.R. Adaptive Filtering Algorithms and Practical Implementation, 4th ed.; Springer: New York, NY, USA, 2013. [Google Scholar]
- Widrow, B.; Stearns, S.D. Adaptive Signal Processing; Prentice Hall: Hoboken, NJ, USA, 1985. [Google Scholar]
- Chen, Y.; Gu, Y.; Hero, A.O. Sparse LMS for system identification. In Proceedings of the IEEE International Conference on Acoustic Speech and Signal Processing, (ICASSP’09), Taipei, Taiwan, 19–24 April 2009; pp. 3125–3128. [Google Scholar]
- Li, Y.; Wang, Y.; Jiang, T. Norm-adaption penalized least mean square/fourth algorithm for sparse channel estimation. Signal Process. 2016, 128, 243–251. [Google Scholar]
- Li, Y.; Wang, Y.; Jiang, T. Sparse-aware set-membership NLMS algorithms and their application for sparse channel estimation and echo cancelation. AEÜ Int. J. Electron. Commun. 2016, 70, 895–902. [Google Scholar]
- Walach, E.; Widrow, B. The least mean fourth (LMF) adaptive algorithm and its family. IEEE Trans. Inf. Theory 1984, 30, 275–283. [Google Scholar] [CrossRef] [Green Version]
- Narasimhan, S.V. Invited paper Application of the least mean fourth (LMF) adaptive algorithm to signals associated with gaussian noise. Int. J. Electron. 1987, 62, 895–913. [Google Scholar] [CrossRef]
- Ma, W.; Duan, J.; Li, Y.; Chen, B. Proportionate adaptive filtering algorithms based on mixed square/fourth error criterion with unbiasedness criterion for sparse system identification. Int. J. Adapt. Control Signal Process. 2018, 32, 1644–1654. [Google Scholar]
- Chen, B.; Xing, L.; Zhao, H.; Zheng, N.; Príncipe, J.C. Generalized correntropy for robust adaptive filtering. IEEE Trans. Signal Process. 2016, 64, 3376–3387. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Jiang, Z.; Shi, W.; Han, X.; Chen, B.D. Blocked maximum correntropy criterion algorithm for cluster-sparse system identification. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 1915–1919. [Google Scholar] [CrossRef]
- Shi, W.; Li, Y.; Chen, B. A separable maximum correntropy adaptive algorithm. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2797–2801. [Google Scholar] [CrossRef]
- Wu, Q.; Li, Y.; Jiang, Z.; Zhang, Y. A Novel Hybrid Kernel Adaptive Filtering Algorithm for Nonlinear Channel Equalization. IEEE Access 2019, 7, 62107–62114. [Google Scholar] [CrossRef]
- Liu, W.; Príncipe, J.C.; Haykin, S. Kernel Adaptive Filtering: A Comprehensive Introduction; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Wu, Q.; Li, Y.; Xue, W. A quantized adaptive algorithm based on the q-Rényi kernel function. Digit. Signal Process. 2022, 120, 103255. [Google Scholar]
- Wu, Q.; Li, Y.; Zakharov, Y.; Xue, W. Quantized Kernel Least Lncosh Algorithm. Signal Process. 2021, 189, 108255. [Google Scholar] [CrossRef]
- Liu, W.; Pokharel, P.P.; Príncipe, J.C. The kernel least-mean-square algorithm. IEEE Trans. Signal Process. 2008, 56, 543–554. [Google Scholar] [CrossRef]
- Wu, Q.; Li, Y.; Xue, W. A Parallel Kernelized Data-Reusing Maximum Correntropy Algorithm. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2792–2796. [Google Scholar] [CrossRef]
- Wu, Q.; Li, Y.; Zakharov, Y.; Xue, W.; Shi, W. A kernel affine projection-like algorithm in reproducing kernel hilbert space. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2249–2253. [Google Scholar] [CrossRef] [Green Version]
- Engel, Y.; Mannor, S.; Meir, R. The kernel recursive least-squares algorithm. IEEE Trans. Signal Process. 2004, 52, 2275–2285. [Google Scholar] [CrossRef]
- Chen, B.; Zhao, S.; Zhu, P.; Príncipe, J.C. Quantized kernel least mean square algorithm. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 22–32. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Park, I.; Príncipe, J.C. An information theoretic approach of designing sparse kernel adaptive filters. IEEE Trans. Neural Netw. 2009, 20, 1950–1961. [Google Scholar] [CrossRef]
- Ma, W.; Duan, J.; Man, W.; Zhao, H.; Chen, B. Robust Kernel Adaptive Filters Based on Mean p-power Error for Noisy Chaotic Time Series Prediction. Eng. Appl. Artif. Intell. 2017, 58, 101–110. [Google Scholar] [CrossRef]
- Liu, W.; Park, I.; Wang, Y.; Príncipe, J.C. Extended kernel recursive least squares algorithm. IEEE Trans. Signal Process. 2009, 57, 3801–3814. [Google Scholar]
- Zhao, S.; Chen, B.; Príncipe, J.C. Kernel adaptive filtering with maximum correntropy criterion. In Proceedings of the The 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 2012–2017. [Google Scholar]
- Luo, X.; Deng, J.; Liu, J.; Li, A.; Wang, W.; Zhao, W. A novel entropy optimized kernel least-mean mixed-norm algorithm. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 1716–1722. [Google Scholar]
- Ma, W.; Qiu, X.; Duan, J.; Li, Y.; Chen, B. Kernel recursive generalized mixed norm algorithm. J. Frankl. Inst. 2018, 355, 1596–1613. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Zhou, H.; Zhou, H. A Novel Second-OrderSine-Cost-Function-Derived Kernel Adaptive Algorithm for Non-Linear System Identification. Symmetry 2023, 15, 827. https://doi.org/10.3390/sym15040827
Sun L, Zhou H, Zhou H. A Novel Second-OrderSine-Cost-Function-Derived Kernel Adaptive Algorithm for Non-Linear System Identification. Symmetry. 2023; 15(4):827. https://doi.org/10.3390/sym15040827
Chicago/Turabian StyleSun, Liping, Hongju Zhou, and Hongwei Zhou. 2023. "A Novel Second-OrderSine-Cost-Function-Derived Kernel Adaptive Algorithm for Non-Linear System Identification" Symmetry 15, no. 4: 827. https://doi.org/10.3390/sym15040827