2.1. Linear Stability of the Systems of Ordinary Differential Equations
We start by concisely presenting, mostly using the approach introduced in [
34], some key consequences of the Lyapunov stability analysis of arbitrary dynamical systems, expressed by general systems of first order Ordinary Differential Equations (ODEs). In the beginning of our presentation, we would like to mention that the stability of a system of first ordinary differential equations is determined, in general, by the roots of its characteristic polynomial. To prove this property, we consider the system of autonomous first order ordinary differential equations [
34],
where
are, by definition,
n smooth functions, possessing derivatives of all orders in their domain of definition. Now, let us linearize the system (1) about one of its steady states (fixed point, or equilibrium point)
, by associating with the arbitrary system (1) the linear system
where the Jacobian matrix
A of the system (1), defined as
, is evaluated at the steady state,
The solutions of Equation (2) can be obtained as [
34]
where, by
, we have denoted the
n components of an arbitrary vector quantity having constant components, while
denote the proper values (eigenvalues) of the matrix
A, which are determined as the algebraic roots of the characteristic polynomial
, which are defined according to the relation,
where, by
, we have denoted the identity matrix, defined in the standard way.
Definition 1 ([
34]).
Let us assume that a solution of the system of the ordinary differential Equation (1) is known. The solution is called stable if and only if all the roots , of the characteristic polynomial are located on the left-hand side of the complex plane, that is, for all roots λ, the condition is satisfied. Assuming that the condition is satisfied, then it follows that, as , , tend exponentially to zero for all i. Hence, the point is stable with respect to small (linear) perturbations of the system of differential equations.
In the case of
n-dimensional system of ordinary differential equations, the characteristic polynomial is given by
where the coefficients
are all real numbers,
,
. Moreover, without any loss of generality, it is possible to consistently consider
, since otherwise we would obtain
, and thus we would have a characteristic polynomial of order
, having the coefficient of the zeroth order non-vanishing.
The important and fundamental necessary and sufficient conditions for the polynomial
to have all algebraic solutions satisfying the condition
may be generally formulated as [
34]
for all
.
An alternative and important method for the study of the linear, Lyapunov stability question is to investigate the algebraic relations involving the non-zero solutions of the characteristic polynomial
. Thus, we obtain
From the values of these coefficients, and by taking into account their algebraic properties, we can determine essential and significant information on the stability properties of the system of ordinary differential Equation (1). in the following, for the sake of completeness of our discussion, we also present the
Remark 1 (Descartes’ Rule of Signs) [
34]).
Let us consider the characteristic polynomial (5) of the system of differential Equation (1), with the coefficient satisfying the condition . Let us denote by m the number of changes in sign in the sequence of the coefficients , ignoring any coefficients in the sequence that are zero. Then, the polynomial has at most m roots that are real and positive. In addition, m, ,
, …, real positive roots of the polynomial do exist [34]. By taking , Descartes’ Rule of Signs gives essential clues about the potential existence of real negative roots of the characteristic polynomial, a piece of information that is crucial for the study of the stability of the systems of strongly nonlinear differential equations.
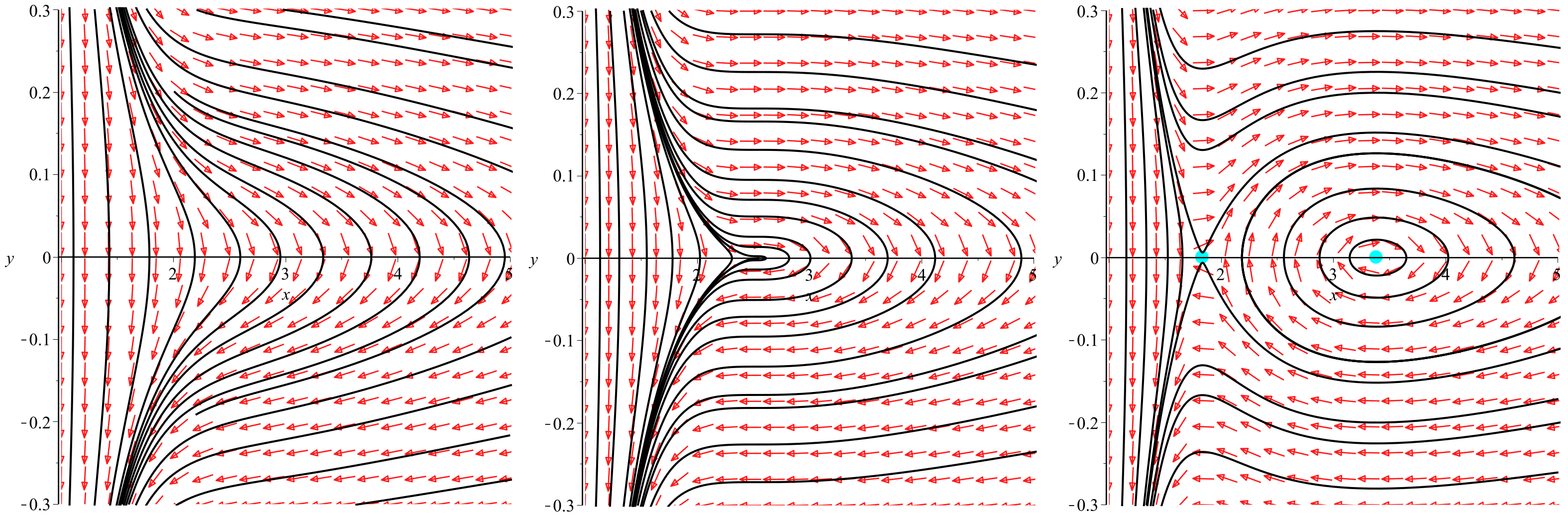
If the proper values of the Jacobian A associated with a system of differential equations, evaluated at the equilibrium point , are known, with Equation (3), we obtain the behavior of solution near . For example, if we consider a two-dimensional autonomous differential system, we obtain the following classification of the equilibrium points: if the eigenvalues of A have negative real parts, then in the phase plane, all solutions are converging towards the steady state (equilibrium point) . The point is named a hyperbolic sink (stable point). Moreover, if the real parts of the proper values (eigenvalues) of A are greater then zero, then all integral curves diverge from the equilibrium point, and is named a hyperbolic source (unstable point). If one eigenvalue is positive, and the other one is negative, the fixed point is a saddle point (unstable). If the proper values (eigenvalues) of A are complex conjugate pairs, and , then the equilibrium point is a spiral point (stable if , and unstable otherwise). If the proper values (eigenvalues) of A are purely imaginary values (), the fixed point is named a center.
If the eigenvalues of the linearized system (2) evaluated in have nonzero real parts, then the equilibrium point is said to be hyperbolic. Otherwise, it is called nonhyperbolic. The relation between the linear stability of the system (1) and its linearization (2) at equilibrium points is given by the following Theorem.
Theorem 1 ((Hartman–Grobman) [
20]).
Let us consider a system of ordinary differential equations ,
, with the vector field f being . Let us assume that is a hyperbolic
fixed point of the considered system of differential equations. Then, a neighborhood of the point , on which the flow is topologically equivalent
to the flow of the linearization of the system of differential equations at , does always exist. For the sake of completeness, we mention that the linear stability of the system (1) near a nonhyperbolic point could be investigated with the aid of the Lyapunov function introduced through the following Theorem and definition.
Theorem 2 ((Lyapunov stability theorem) [
20]).
Let us consider that a vector field ,
is given. Let denote an equilibrium point of the vector field . Moreover, let be a function, defined on some neighborhood U of , and having the properties(i) and , if ;
(ii) in .
Then, if the conditions (i) and (ii) are satisfied, the point is stable. Furthermore, if
(iii) in , the point is asymptotically stable.
The function from the above Theorem is called the Lyapunov function. It has the property that, near the equilibrium point , the integral curves are tangent to the surface levels of , or they cross the surface level oriented towards their interior. In other words, .
2.2. KCC Stability Theory
In the following, we introduce the basic ideas, and geometric concepts, of the KCC theory. Our presentation mostly follows the similar expositions of the theory in [
8,
25], respectively.
2.2.1. Geometrization of Arbitrary Dynamical Systems
We introduce first a set of dynamical variables
,
, assumed to be defined on a real, smooth
n-dimensional manifold
. We denote in the following by
the tangent bundle of
. Usually,
is considered as
,
, and therefore
[
24].
Let us consider now a particular subset
of the
dimensional Euclidian space defined as
. On
, we assume the existence of a
dimensional coordinate system denoted
,
, where we have also introduced the notations
, and
, respectively. By
t, we denote the ordinary time coordinate. We define the coordinates
as
A fundamental supposition in the KCC theory refers to the coordinate
t, which can be interpreted physically as the time variable, and which is assumed to be an absolute invariant, which does not change in the coordinate transformations. Thus, by taking into account this assumption, on the base manifold
, the only allowed transformations of the coordinates are of the general form [
24],
In various mathematical applications of scientific importance, and interest, the equations of motion describing the evolution of natural or engineering systems are obtainable from a Lagrangian function
L, which describes the state of the system, and is an application
. The dynamical evolution of the system can be obtained with the help of the Euler–Lagrange equations, given by [
24]
For the specific case of mechanical systems, the quantities
,
give the components of the external force
, which cannot be derived from a potential. By assuming that the Lagrangian
L is regular, by using some simple calculations, we obtain the fundamental results that the Euler–Lagrange equations Equation (12) are equivalent mathematically to a complicated system of second-order ordinary, strongly nonlinear differential equations, given by [
8,
24]
As for the functions , we assume that each function is in a neighborhood of some initial conditions , defined in .
The key conjecture of the KCC theory is the following. Let us assume that an arbitrary system of strongly nonlinear second-order ordinary differential equations of the form (13) is defined in a general form. Even if the Lagrangian function for the system is not known a priori, we still can investigate the evolution and the behavior of its trajectories by using techniques suggested by the differential geometry of the Finsler spaces. This analysis can be carried out due to the existence of a close similarity between the paths of the Euler–Lagrange system, and the geodesics in a Finsler geometry.
2.2.2. The Nonlinear and Berwald Connections, and the KCC Invariants Associated with a Dynamical System
To investigate from a geometrical perspective, the mathematical properties of the dynamical system described by the system of differential equations Equation (13), we first introduce the nonlinear connection
N, defined on the base manifold
, and having the coefficients
given by [
35]
From a general geometric perspective, the nonlinear connection
can be characterized with the help of a dynamical covariant derivative
by using the following procedure. Let us assume that two vector fields
v and
w, respectively, are given, with both vector fields defined over a manifold
. Next, we define the covariant derivative
of
w as [
36]
For
, from Equation (15), we directly reobtain the definition of the standard covariant derivative for the particular case of the Levi–Civita linear connection, as introduced usually in the Riemannian geometry [
36].
Now, we consider the open subset
on which the system of differential Equation (13) is defined, together with the coordinate transformations, defined by Equation (11), and assumed to be non-singular. On this mathematical structure, we can define the KCC-covariant derivative of an arbitrary vector field
by means of the definition [
9,
10,
11,
12],
By taking
, we obtain
The contravariant vector field is defined on the subset of the Euclidian space, as one can see immediately from the above equation. It represents the first KCC invariant. From a general physical perspective, and within the mathematical formalism of the classical Newtonian mechanics, , the first KCC invariant, could be understood as an external force, not derivable from a potential, and acting on the dynamical system.
As a next step in our discussion of the KCC theory, we consider the infinitesimal variations of the trajectories
of the dynamical system (13) into neighbouring ones, with the variations defined according to the prescriptions,
where, by
, we have denoted a small infinitesimal quantity, while
denotes the components of an arbitrary contravariant vector field
. The vector field
is defined along the trajectory
of the system of the differential equations under consideration. After the substitution of Equation (18) into Equation (13), and by considering the limit
, we arrive to the deviation, or Jacobi, equations, representing the central mathematical result of the KCC theory, and which are given by [
9,
10,
11,
12]
With the help of the KCC-covariant derivative, as introduced in Equation (16), we can reformulate Equation (19) in a fully covariant form as
where we have denoted
In Equation (21), we have defined the important tensor
, given by [
8,
9,
10,
11,
12,
35]
and which in the KCC theory is named the Berwald connection.
The tensor is called the second KCC-invariant. It is the fundamental quantity in the KCC theory, and in the Jacobi stability investigations. Alternatively, is also called the deviation curvature tensor, by indicating its essential geometric nature. Furthermore, we will call in the following Equation (20) the Jacobi equation. This equation exists in both Riemann or Finsler geometries. If one assumes that the system of Equation (13) corresponds to the geodesic motion of a physical system, then Equation (20) gives the so-called Jacobi field equation, which can always be introduced in the considered geometry.
The trace
of the curvature deviation tensor, constructed from
, is a scalar invariant. It can be calculated from the relation
Other important invariants can also be constructed in the KCC theory. The most commonly used invariants are the third, fourth and fifth invariants associated with the given dynamical system, whose evolution and behavior is represented by the second order system of nonlinear Equation (13). These invariants are introduced according to the definitions [
9]
From a geometrical perspective,
, the third KCC invariant, can be described as a torsion tensor.
, the fourth KCC invariant, represents the equivalent of the Riemann–Christoffel curvature tensor, while
, the fifth KCC invariant, is called the Douglas tensor [
8,
9]. Let us point out now that, in a Berwald geometry, these three tensors can always be defined. It is also important to mention that, in the KCC theory, the five invariants defined above are the fundamental mathematical quantities that describe the geometrical properties, and interpretation, of a dynamical system whose time evolution and behavior are represented by an arbitrary system of second-order strongly nonlinear differential equations.
2.2.3. Jacobi Stability of Dynamical Systems
In a large number of scientific investigations, the analysis of the stability of biological, chemical, biochemical, engineering, medical or physical systems, as well as the study of the trajectories of a system of differential equations, as given, for example, by Equation (13), in the vicinity of a given point , is of fundamental significance for the understanding of its properties. Moreover, the study of the stability can give important information on the temporal evolution of a general dynamical system.
For simplicity, in the following, we adopt as the origin of the time variable
t the value
. Moreover, we define
as representing the canonical inner product of
. We also introduce the null vector
O defined in
,
. Next, we assume that the trajectories
of the system of differential Equation (13) represent smooth curves in the Euclidean space
, endowed with the canonical inner product
. Moreover, to completely characterize the deviation vector
, we assume, as a general property, that it satisfies the set of two essential initial conditions
and
, respectively [
8,
9,
10,
11].
To describe the dispersing/focusing trend of the trajectories of a dynamical system around
, we introduce the following intuitive and simple mathematical picture. Let us assume first that the deviation vector
satisfies the condition
,
[
8,
24]. If this is the case, then it turns out that all the trajectories of the dynamical system are focusing together, and converge towards the origin. Let us assume now that the deviation vector
has the property that the condition
,
is satisfied. In this case, it follows that all the solutions of the system of differential Equation (13) have at infinity a dispersing behavior [
8,
9,
10,
11].
The dispersing/focusing behavior of the solutions of a given system of second order ordinary differential equations can be also characterized, from the geometrical perspective introduced by the KCC theory, by considering the algebraic properties of the deviation curvature tensor
. This can be achieved in the following way. For
, the trajectories of the system of strongly nonlinear equations Equation (13) are bunching/focusing together if and only if the real parts of the characteristic values (eigenvalues) of the deviation tensor
are strictly negative. Otherwise, the trajectories of the dynamical system have a dispersing behavior if and only if the real parts of the characteristic values (eigenvalues) of
are strictly positive [
8,
9,
10,
11].
By taking into account the qualitative discussion presented above, we present now the rigorous mathematical definition of the notion of Jacobi stability for an arbitrary dynamical system, described by a system of ordinary second order differential equations, which is given by the following [
8,
9,
10,
11]:
Definition 2. Let us consider that the general system of differential equations Equation (13), describing the time evolution of a dynamical system, satisfies the initial conditions:defined with respect to the norminduced by a positive definite inner product. If these conditions are satisfied, the trajectories of the dynamical system, given by Equation (13), are designated as Jacobi stable if and only if the real parts of the characteristic values (eigenvalues) of the curvature deviation tensor are everywhere strictly negative.
On the other hand, if the real parts of the characteristic values (eigenvalues) of the curvature deviation tensor are strictly positive everywhere, the trajectories of the dynamical system are designated as unstable in the Jacobi sense.
This definition allows us to straightforwardly investigate the stability of the systems of second order differential equations, and of the associated dynamical systems, as an alternative to the standard Lyapunov linear stability method.
2.3. The Correlation between Lyapunov and Jacobi Stability for a Two-Dimensional Autonomous Differential System
Let us recall that the Lyapunov stability is determined by the nature and sign of the eigenvalues of the Jacobian matrix evaluated at an equilibrium point (fixed point). On the other hand, the Jacobi stability is given by the sign of the real part of the eigenvalues of the curvature deviation tensor , calculated at the same point.
The Jacobi stability of the two-dimensional systems of first order differential equations was explored in [
10,
11], where the authors considered a system of two arbitrary differential equations written in the general form,
Moreover, it was assumed that the point is a fixed point of the system (25), that is, . If the equilibrium point is , with the change of the variable , and , respectively, the equilibrium point is moved to the origin .
In the approach pioneered in [
10,
11], after relabelling the variables by denoting
v as
x, and
as
y, and by also assuming that the condition
is satisfied by the function
, it turns out that it is possible to eliminate from the system of the two equations (25) the variable
u. By taking into account that the point
is a fixed point, from the Theorem of the Implicit Functions, it follows that, in the neighbourhood of the point
, the algebraic equation
has a unique solution
. By taking into account that
, where the subscripts denote the partial derivatives with respect to
u and
v, respectively, one obtains finally an autonomous one-dimensional second order equation, equivalent mathematically to the system (25), and which is obtained in the general form as
where
Hence, the Jacobi stability properties of a system of two arbitrary first order differential equations can be studied in detail via the equivalent Equation (26) by using the methods of the KCC theory [
10,
11]. Thereupon, the KCC stability properties of a first order system of differential equations of the form (25) can also be determined easily, thus allowing an in depth comparison between the Jacobi and Lyapunov stability properties of the two-dimensional dynamical systems, which can be performed in a straightforward manner [
8].
Let us recall some results from [
8] which are applied in this paper. The Jacobian matrix of (25) is
The characteristic equation is given by
where
, and
are the trace and the determinant of the Jacobian matrix
, respectively.
The signs of the discriminant , and the trace and the determinant of A, give the Lyapunov (linear) stability of the fixed point .
The system (25) is equivalent from a mathematical point of view to the second order differential Equation (26). Performing the Jacobi stability analysis for this last equation in [
8], assuming that
, the authors obtained the result that the curvature deviation tensor
at the fixed point
is given by
where
is the discriminant of the characteristic Equation (29) and
. Therefore, the authors of [
8] concluded their analysis by formulating the following
Theorem 3 ([
8]).
Let us consider the system of two first order ordinary differential equations, given by Equation (25), with the fixed point , such that . Then, the trajectory is Jacobi stable if and only if . Boehmer et al. [
8] emphasized also that, if
, eliminating the variable
v and relabeling
u as
x, we obtain a similar result that the trajectory
is Jacobi stable if and only if
.
In other words, they demonstrated that: if one considers the system of ordinary differential Equation (25) with the fixed point located in the origin of the coordinate system, and satisfying the condition , then the Jacobian matrix J evaluated at the point P has complex proper values (eigenvalues) if and only if P satisfies the condition of being a stable point in the Jacobi sense.
Let us recall that the condition of stability in the Lyapunov sense for a solution of the dynamical system (25) is that for all roots of the characteristic (eigenvalue) Equation (29). The condition for the Jacobi stability thus requires that the discriminant of the same characteristic (eigenvalue) equation to take negative values. Consequently, Lyapunov stability is in general not equivalent with Jacobi stability, and it is worth finding out the equilibrium points where a system is stable in both Jacobi and Lyapunov sense.
In the next section, we will investigate the relation between Jacobi and Lyapunov stability of the circular orbits around a GMGHS black hole.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






