
DOA Estimation of Indoor Sound Sources Based on Spherical Harmonic Domain Beam-Space MUSIC
 , ,
, ,
Abstract
:1. Introduction
- We propose a novel spherical harmonic domain beam-space MUSIC algorithm. Combined with the advantages of the rigid-sphere configuration, the effects of the low SNR environment and Bessel’s zero on the performance of multi-source DOA estimation are better reduced. This results in a more robust multi-source localization capability and adjacent source discrimination;
- We use a quadratic-constraint quadratic-planning optimization method to generate a multi-objective optimized signal-independent beam weight. We construct a very flexible rotationally symmetric beamformer so that the 3D beam of the spherical array can be arbitrarily redirected without redesigning the beam shape;
- We verify the superior performance of the proposed algorithm using simulated data as well as field-testing data in real-world situations (anechoic room and reverberant room).
2. System Models
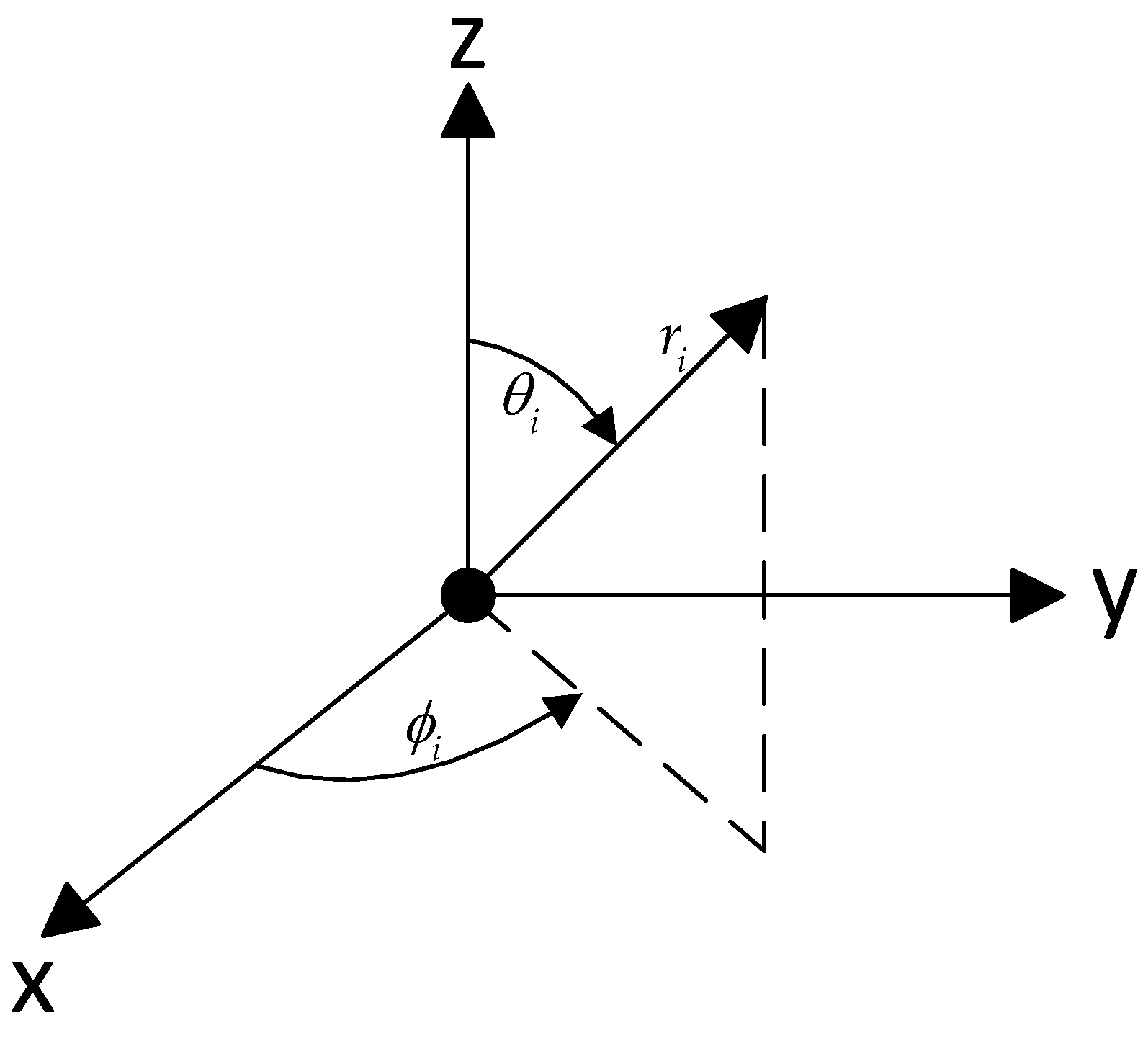
2.1. Space-Domain System Model
2.2. Spherical Harmonic Domain System Model
3. Methods
3.1. Framework of the Proposed SHD-BMUSIC
- The SHD axisymmetric beamformer is designed to separate the beam steering from the beam weights so that the beam steering can be adjusted arbitrarily without adjusting the beam weights;
- The SHD beam weights can be independent of the signal frequency, without the demands on a special constant beam-width design;
- The frequency and angle components of the source can be decoupled in the SHD, and the frequency smoothing can be used to decouple the coherent source without affecting the DOAs of the sources [14].
3.2. Beam Weight Design
3.3. Beam Direction Chart Indicator
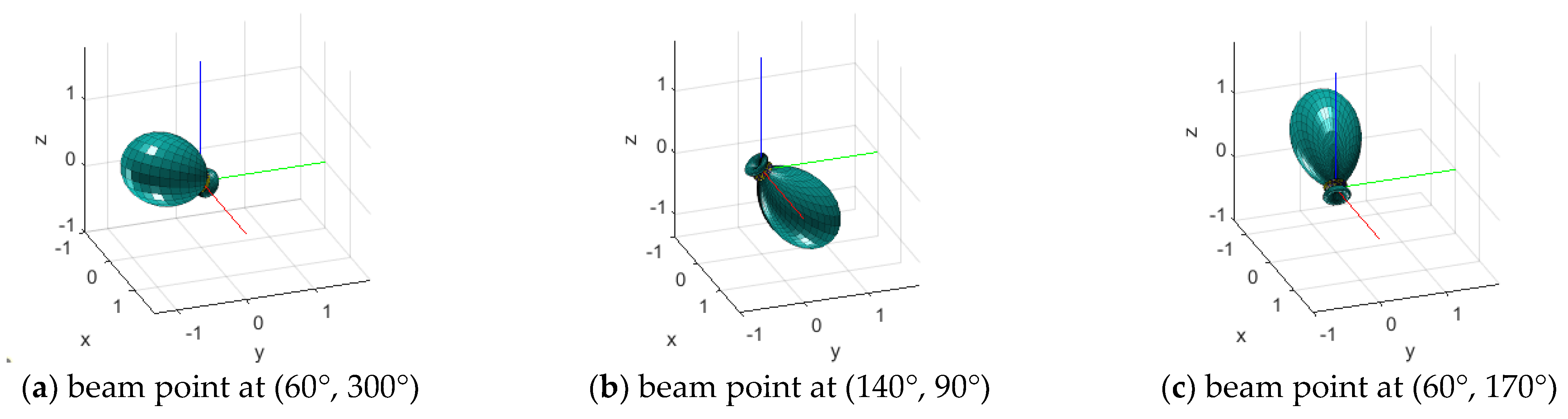
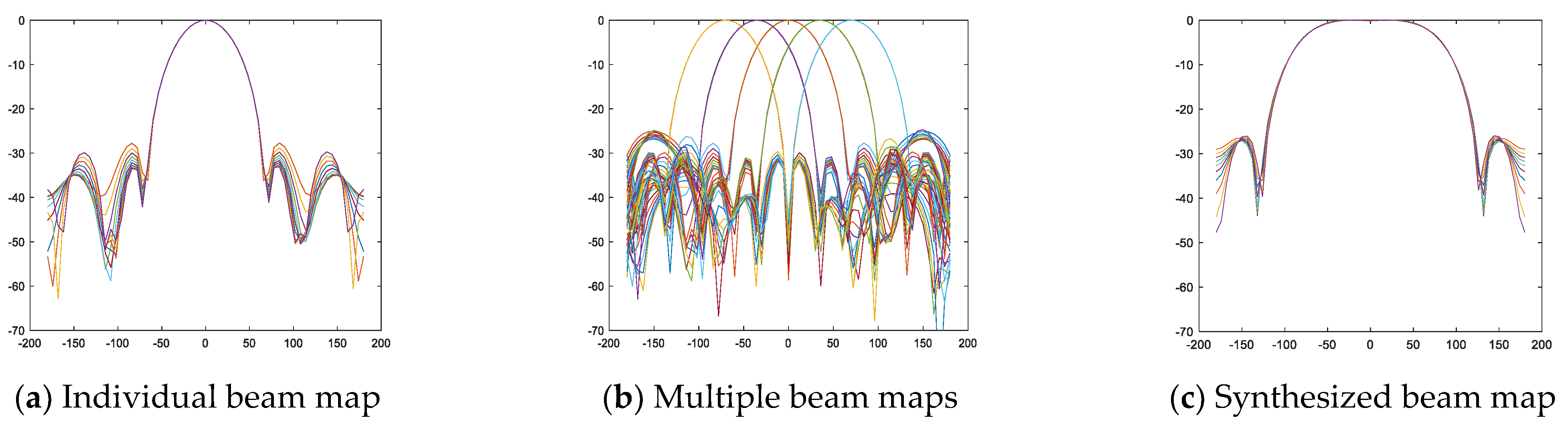
3.4. Rotational Symmetric Beamformer
3.5. Beam Domain MUSIC
4. Experiment
4.1. Simulation Parameter Settings
4.2. DOA Estimated Evaluation Metrics
4.3. Simulation Testing Results
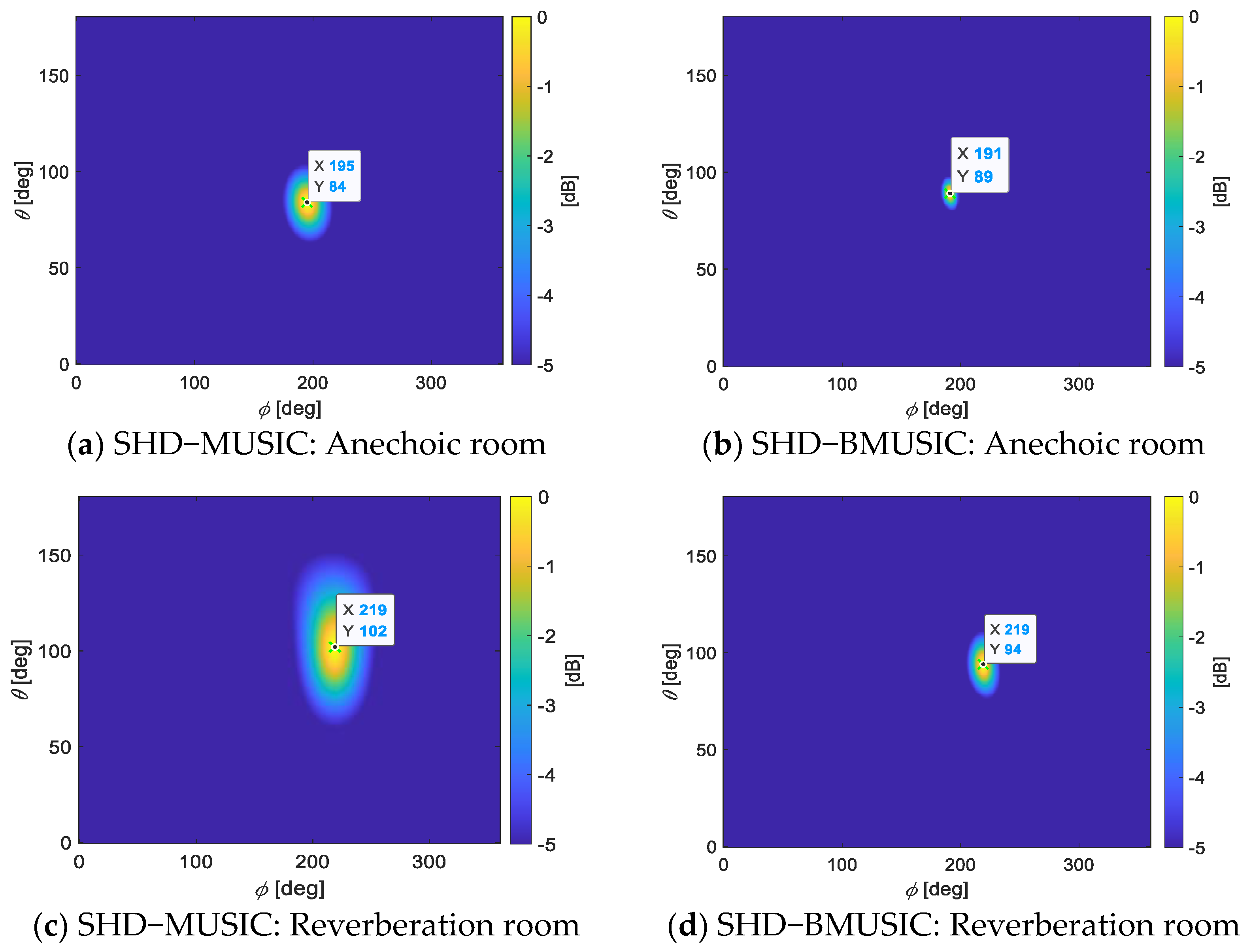
4.3.1. Single-Source Localization Algorithm Verification
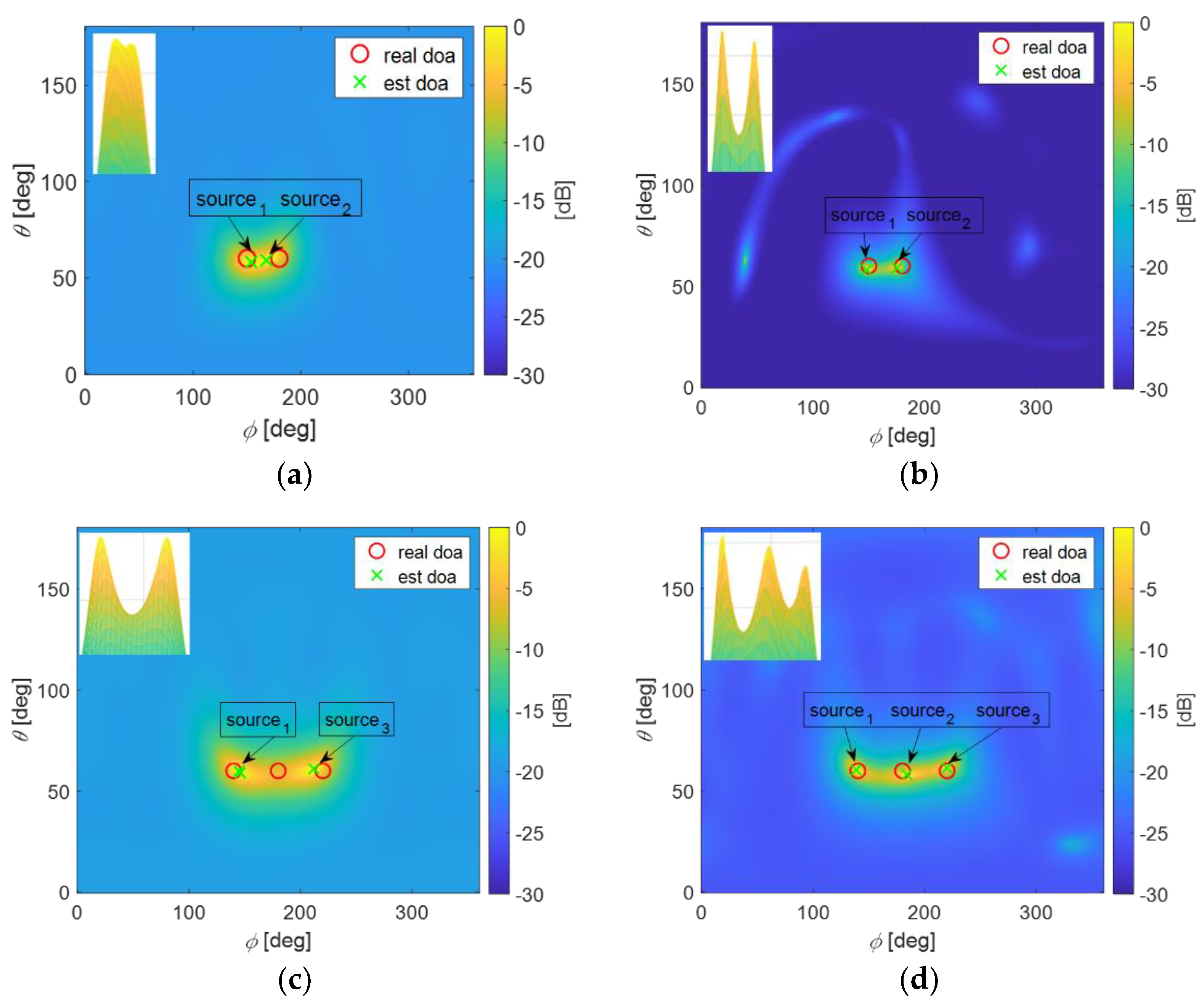
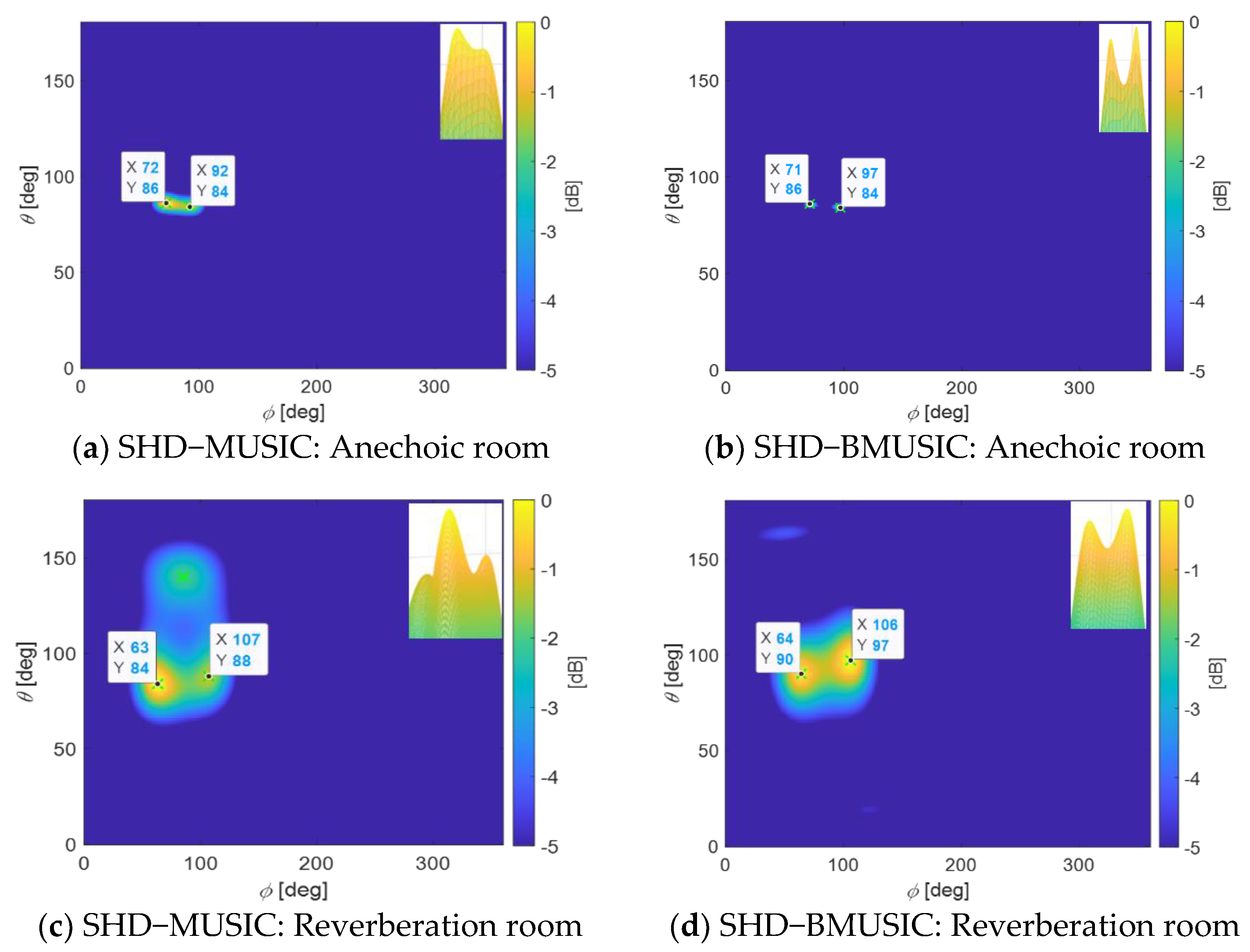
4.3.2. Adjacent Sound Sources Localization Algorithm Verification
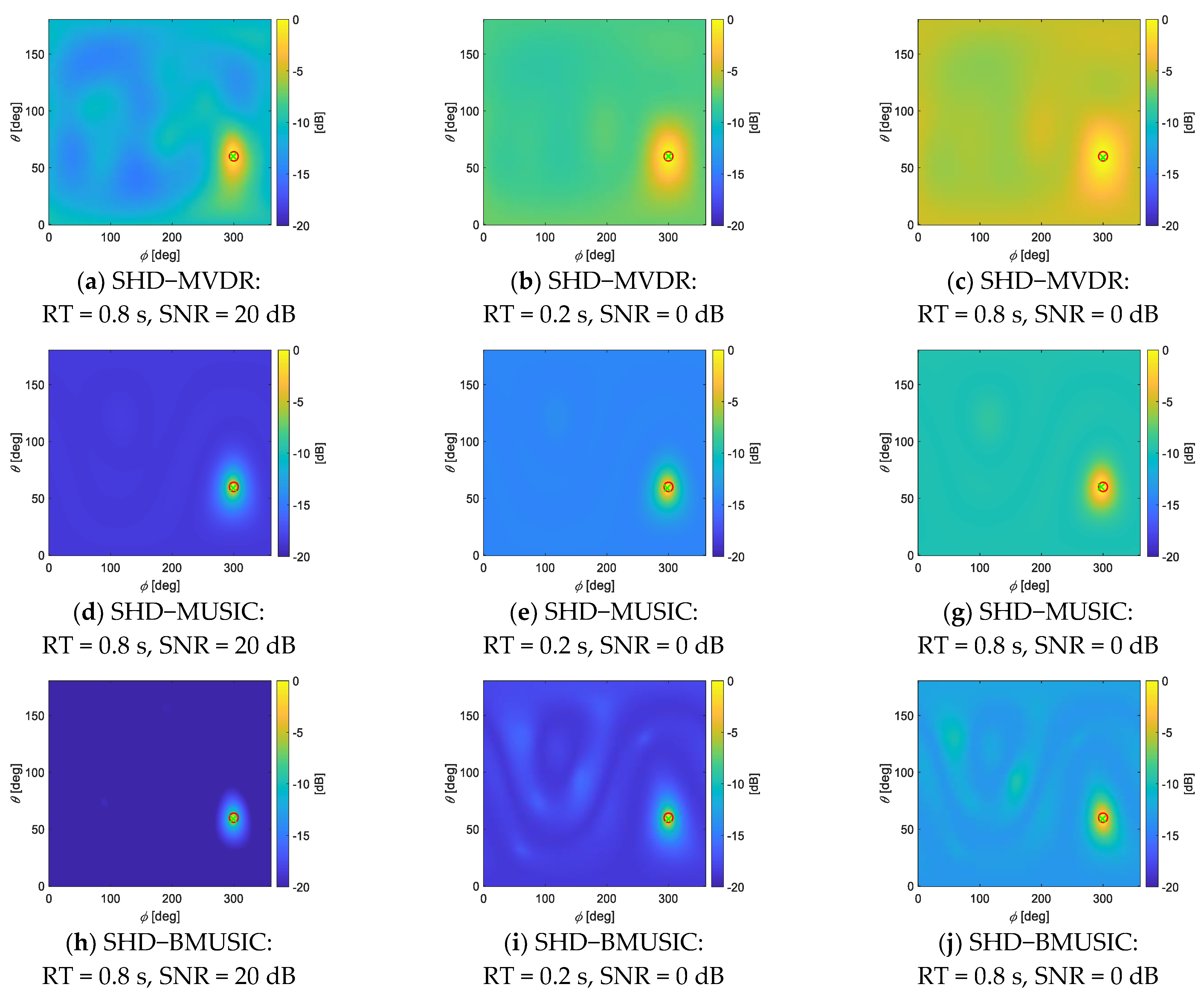
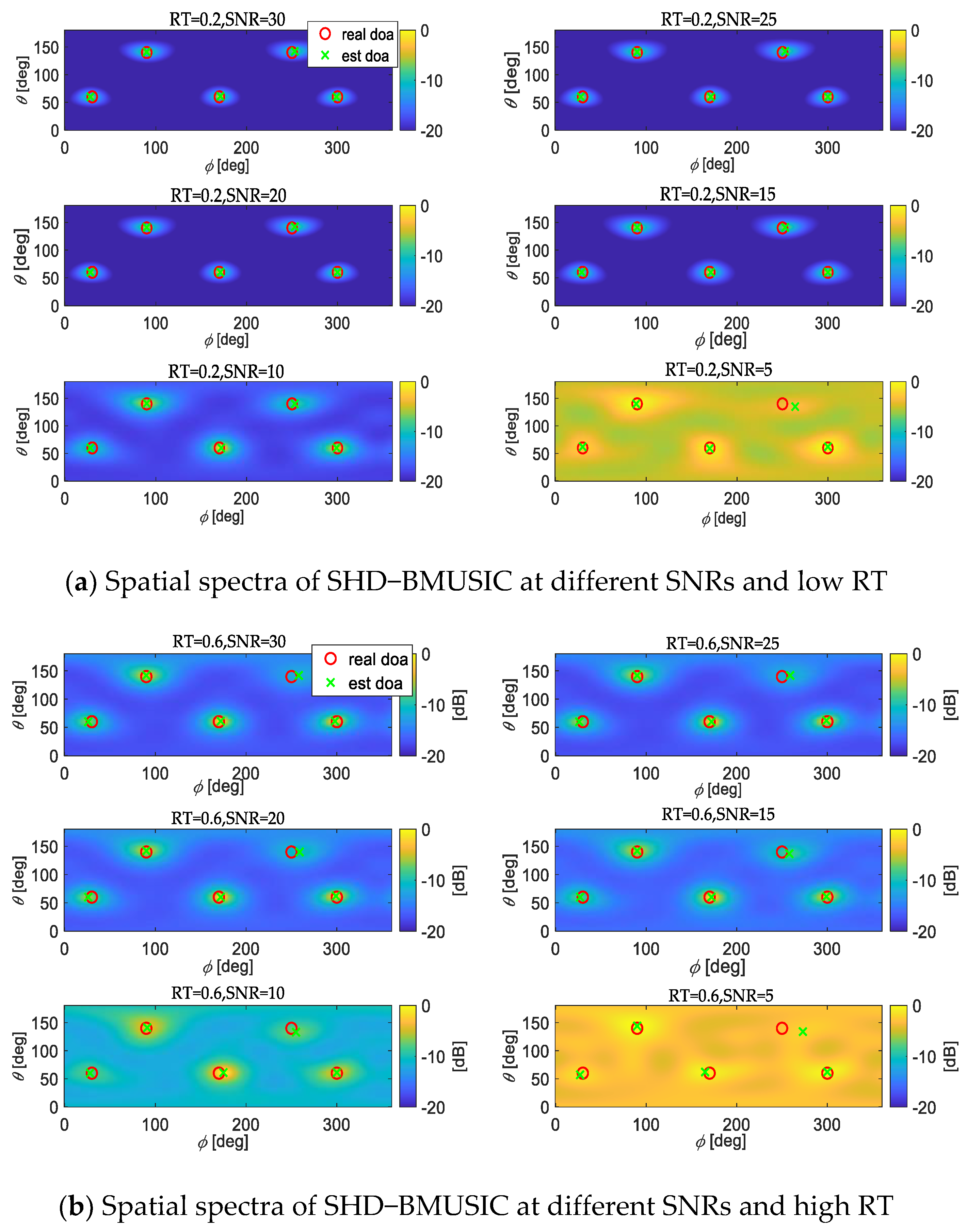
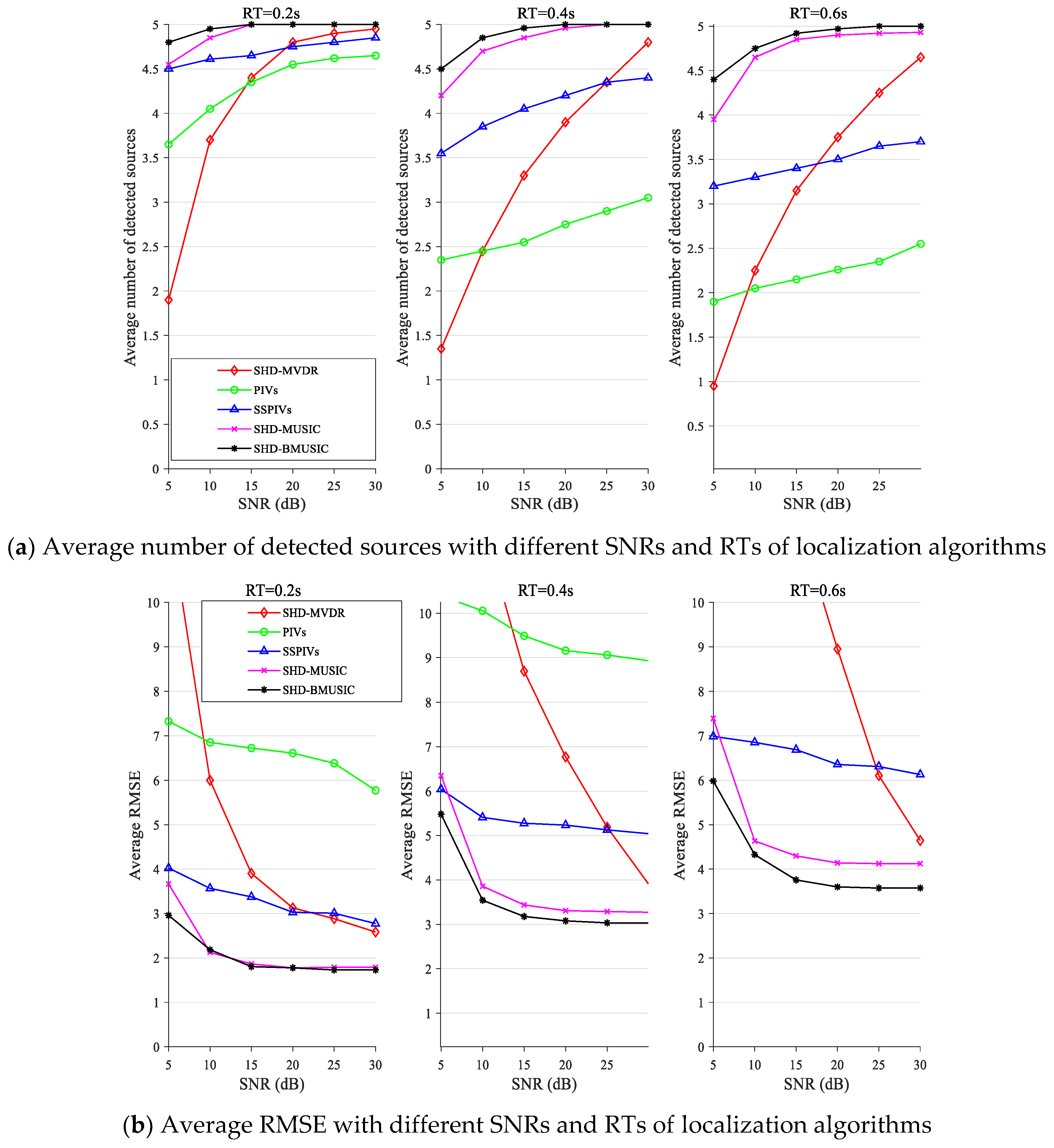
4.3.3. Multi-Source Localization Algorithm Verification at Different SNRs and RTs
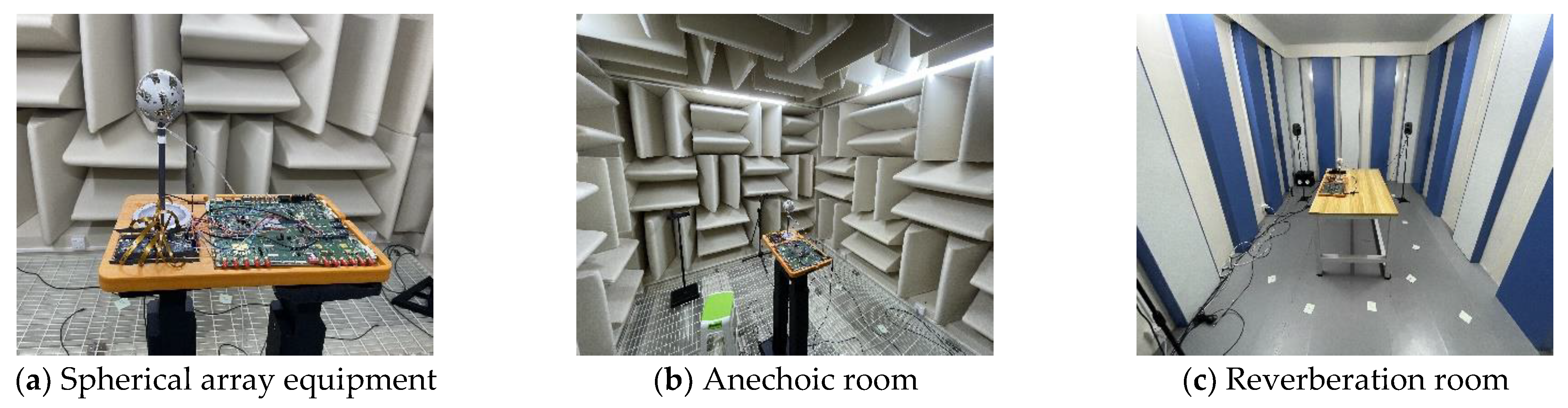
4.4. Field Testing Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Evers, C.; Lollmann, H.W.; Mellmann, H.; Schmidt, A.; Barfuss, H.; Naylor, P.A.; Kellermann, W. The LOCATA Challenge: Acoustic Source Localization and Tracking. IEEE/ACM Trans. Audio Speech Lang. Process. 2020, 28, 1620–1643. [Google Scholar] [CrossRef]
- He, H.; Wu, L.; Lu, J.; Qiu, X.; Chen, J. Time Difference of Arrival Estimation Exploiting Multichannel Spatio-Temporal Prediction. IEEE Trans. Audio Speech Lang. Process. 2013, 21, 463–475. [Google Scholar] [CrossRef]
- Diaz-Guerra, D.; Miguel, A.; Beltran, J.R. Robust Sound Source Tracking Using SRP-PHAT and 3D Convolutional Neural Networks. IEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 300–311. [Google Scholar] [CrossRef]
- Jaafer, Z.; Goli, S.; Elameer, A.S. Performance Analysis of Beam Scan, MIN-NORM, Music and Mvdr DOA Estimation Algorithms. In Proceedings of the 2018 International Conference on Engineering Technology and their Applications (IICETA), Al-Najaf, Iraq, 8–9 May 2018; pp. 72–76. [Google Scholar]
- Xu, C.; Xiao, X.; Sun, S.; Rao, W.; Chng, E.S.; Li, H. Weighted Spatial Covariance Matrix Estimation for MUSIC Based TDOA Estimation of Speech Source. In Proceedings of the Interspeech 2017, ISCA, Stockholm, Sweden, 20–24 August 2017; pp. 1894–1898. [Google Scholar]
- Tervo, S.; Politis, A. Direction of Arrival Estimation of Reflections from Room Impulse Responses Using a Spherical Microphone Array. IEEE/ACM Trans. Audio Speech Lang. Process. 2015, 23, 1539–1551. [Google Scholar] [CrossRef]
- Hu, Y.; Lu, J.; Qiu, X. Direction of Arrival Estimation of Multiple Acoustic Sources Using a Maximum Likelihood Method in the Spherical Harmonic Domain. Appl. Acoust. 2018, 135, 85–90. [Google Scholar] [CrossRef]
- Choi, J.-W.; Zotter, F.; Jo, B.; Yoo, J.-H. Multiarray Eigenbeam-ESPRIT for 3D Sound Source Localization With Multiple Spherical Microphone Arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2022, 30, 2310–2325. [Google Scholar] [CrossRef]
- Yadav, S.K.; George, N.V. Sparse Distortionless Modal Beamforming for Spherical Microphone Arrays. IEEE Signal Process. Lett. 2022, 29, 2068–2072. [Google Scholar] [CrossRef]
- Yan, S.; Sun, H.; Svensson, U.P.; Ma, X.; Hovem, J.M. Optimal Modal Beamforming for Spherical Microphone Arrays. IEEE Trans. Audio Speech Lang. Process. 2011, 19, 361–371. [Google Scholar] [CrossRef]
- Kumar, L.; Hegde, R.M. Near-Field Acoustic Source Localization and Beamforming in Spherical Harmonics Domain. IEEE Trans. Signal Process. 2016, 64, 3351–3361. [Google Scholar] [CrossRef]
- Khaykin, D.; Rafaely, B. Acoustic Analysis by Spherical Microphone Array Processing of Room Impulse Responses. J. Acoust. Soc. Am. 2012, 132, 261–270. [Google Scholar] [CrossRef]
- Kumar, L.; Bi, G.; Hegde, R.M. The Spherical Harmonics Root-Music. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 3046–3050. [Google Scholar]
- Khaykin, D.; Rafaely, B. Coherent Signals Direction-of-Arrival Estimation Using a Spherical Microphone Array: Frequency Smoothing Approach. In Proceedings of the 2009 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics, New Paltz, NY, USA, 17–20 October 2009; pp. 221–224. [Google Scholar]
- Pan, X.; Wang, H.; Lou, Z.; Su, Y. Fast Direction-of-Arrival Estimation Algorithm for Multiple Wideband Acoustic Sources Using Multiple Open Spherical Arrays. Appl. Acoust. 2018, 136, 41–47. [Google Scholar] [CrossRef]
- Samarasinghe, P.; Abhayapala, T.; Poletti, M. Wavefield Analysis Over Large Areas Using Distributed Higher Order Microphones. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 22, 647–658. [Google Scholar] [CrossRef]
- Coteli, M.B.; Hacihabiboglu, H. Multiple Sound Source Localization with Rigid Spherical Microphone Arrays via Residual Energy Test. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 790–794. [Google Scholar]
- Jin, C.T.; Epain, N.; Parthy, A. Design, Optimization and Evaluation of a Dual-Radius Spherical Microphone Array. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 22, 193–204. [Google Scholar] [CrossRef]
- Hu, Y.; Abhayapala, T.D.; Samarasinghe, P.N. Multiple Source Direction of Arrival Estimations Using Relative Sound Pressure Based MUSIC. IEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 253–264. [Google Scholar] [CrossRef]
- Nadiri, O.; Rafaely, B. Localization of Multiple Speakers under High Reverberation Using a Spherical Microphone Array and the Direct-Path Dominance Test. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 22, 1494–1505. [Google Scholar] [CrossRef]
- Madmoni, L.; Rafaely, B. Direction of Arrival Estimation for Reverberant Speech Based on Enhanced Decomposition of the Direct Sound. IEEE J. Sel. Top. Signal Process. 2019, 13, 131–142. [Google Scholar] [CrossRef]
- Rafaely, B.; Alhaiany, K. Speaker Localization Using Direct Path Dominance Test Based on Sound Field Directivity. Signal Processing 2018, 143, 42–47. [Google Scholar] [CrossRef]
- Jarrett, D.P.; Habets, E.A.P.; Thomas, M.R.P.; Naylor, P.A. Rigid Sphere Room Impulse Response Simulation: Algorithm and Applications. J. Acoust. Soc. Am. 2012, 132, 1462–1472. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Samarasinghe, P.N.; Abhayapala, T.D.; Dickins, G. Modeling Characteristics of Real Loudsouers Using Various Acoustic Models: Modal-Domain Approaches. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 561–565. [Google Scholar]
- Rafaely, B.; Weiss, B.; Bachmat, E. Spatial Aliasing in Spherical Microphone Arrays. IEEE Trans. Signal Process. 2007, 55, 1003–1010. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, J. Flexible Beampattern Design Algorithm for Spherical Microphone Arrays. IEEE Access 2019, 7, 139488–139498. [Google Scholar] [CrossRef]
- Meyer, J.; Elko, G. A Highly Scalable Spherical Microphone Array Based on an Orthonormal Decomposition of the Soundfield. In Proceedings of the IEEE International Conference on Acoustics Speech and Signal Processing, Orlando, FL, USA, 13–17 May 2002; pp. II-1781–II-1784. [Google Scholar]
- Li, X.; Yan, S.; Ma, X.; Hou, C. Spherical Harmonics MUSIC versus Conventional MUSIC. Appl. Acoust. 2011, 72, 646–652. [Google Scholar] [CrossRef]
- Moore, A.H.; Evers, C.; Naylor, P.A. Direction of Arrival Estimation in the Spherical Harmonic Domain Using Subspace Pseudointensity Vectors. IEEE/ACM Trans. Audio Speech Lang. Process. 2017, 25, 178–192. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Average Number of Detected Sources | Average RMSE | ||
|---|---|---|---|---|
| SHD-MUSIC | (58°, 155°) | (59°, 171°) | 1.45 | 5.4261 |
| SHD-BMUSIC | (59°, 149°) | (58°, 173°) | 1.96 | 4.6440 |
| Methods | Average Number of Detected Sources | Average RMSE | |||
|---|---|---|---|---|---|
| SHD-MUSIC | (60°, 145°) | (59°, 147°) | (61°, 212°) | 2.06 | 3.4549 |
| SHD-BMUSIC | (60°, 139°) | (58°, 185°) | (62°, 221°) | 2.84 | 2.8284 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weng, L.; Song, X.; Liu, Z.; Liu, X.; Zhou, H.; Qiu, H.; Wang, M. DOA Estimation of Indoor Sound Sources Based on Spherical Harmonic Domain Beam-Space MUSIC. Symmetry 2023, 15, 187. https://doi.org/10.3390/sym15010187
Weng L, Song X, Liu Z, Liu X, Zhou H, Qiu H, Wang M. DOA Estimation of Indoor Sound Sources Based on Spherical Harmonic Domain Beam-Space MUSIC. Symmetry. 2023; 15(1):187. https://doi.org/10.3390/sym15010187
Chicago/Turabian StyleWeng, Liuqing, Xiyu Song, Zhenghong Liu, Xiaojuan Liu, Haocheng Zhou, Hongbing Qiu, and Mei Wang. 2023. "DOA Estimation of Indoor Sound Sources Based on Spherical Harmonic Domain Beam-Space MUSIC" Symmetry 15, no. 1: 187. https://doi.org/10.3390/sym15010187