
A Novel Multi-Agent Model-Free Adaptive Control Algorithm for a Class of Multivehicle Systems with Constraints
Abstract
:1. Introduction
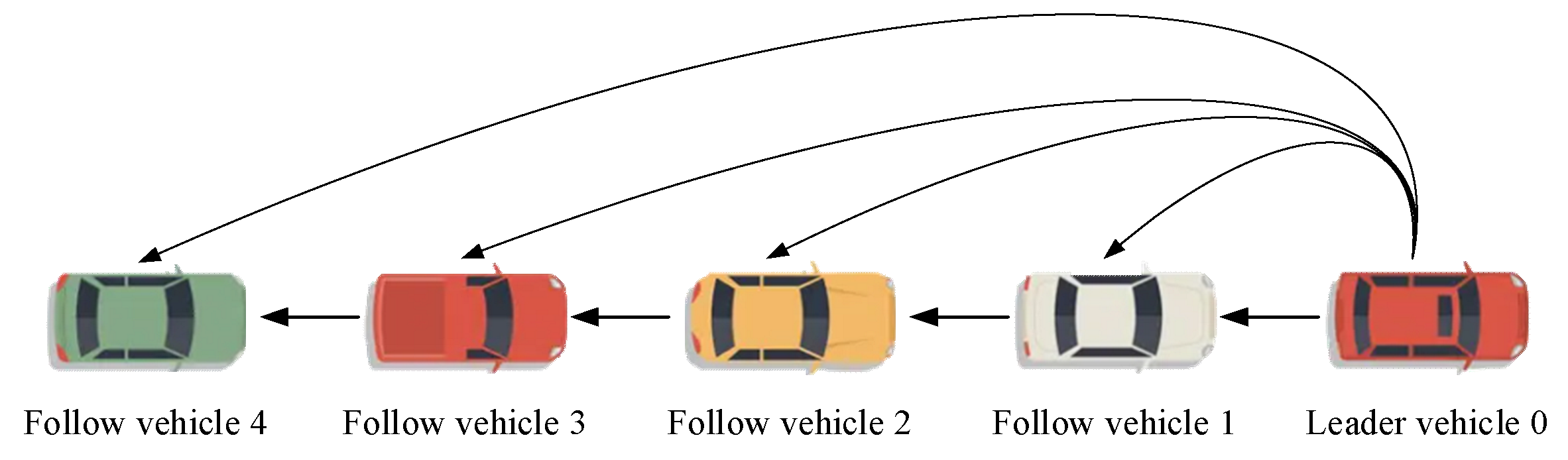
2. Vehicle Dynamics and Kinematic Process Analysis
- (1)
- In the process of driving, there is no coupling between the transverse and longitudinal motion;
- (2)
- The mass of the vehicle is fixed during driving;
- (3)
- The sideslip of the tires is ignored.
3. cMFAC Controller Design
3.1. Background Information
- (1)
- Graph theory
- (2)
- Notation
3.2. Dynamic Linearization
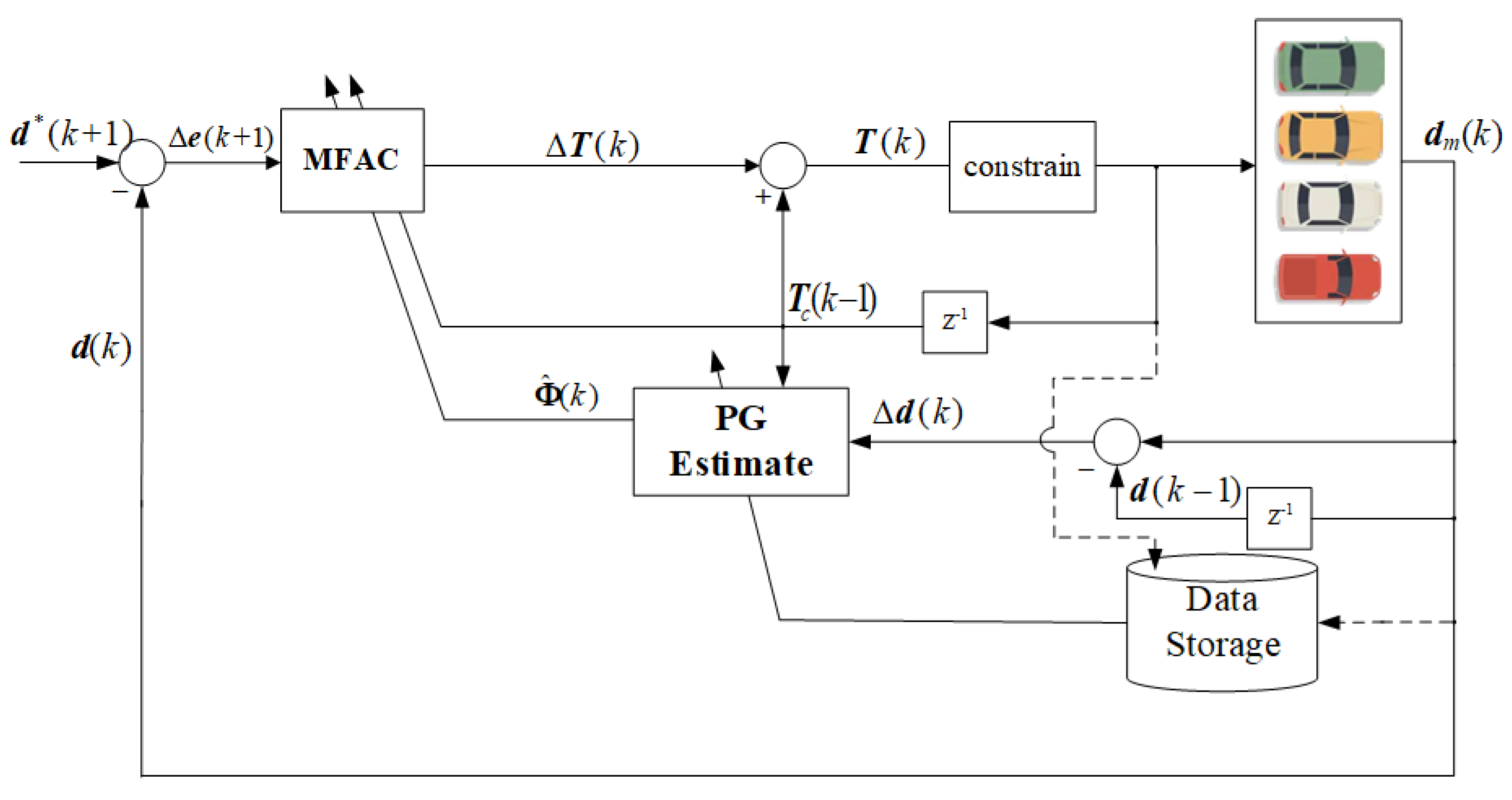
3.3. Design of cMFAC Controller
- (1)
- Controller design
- (2)
- Pseudo-partial derivative estimation
| Algorithm 1: Pseudocode of the cMFAC Algorithm. |
While k<max_execution time do Calculate the distance difference e(k) between the follow vehicle and the leader vehicle Calculate the next time input T(k) according(21) if T(k) < (k) Perform constraint processing End if Input the T(k) at this time into the following vehicle to obtain the output d(k + 1) Calculate the Δd(k + 1) Estimate the pseudo derivative Φ(k + 1) according(28) Storage the Φ(k + 1), T(k) and d(k + 1) End |
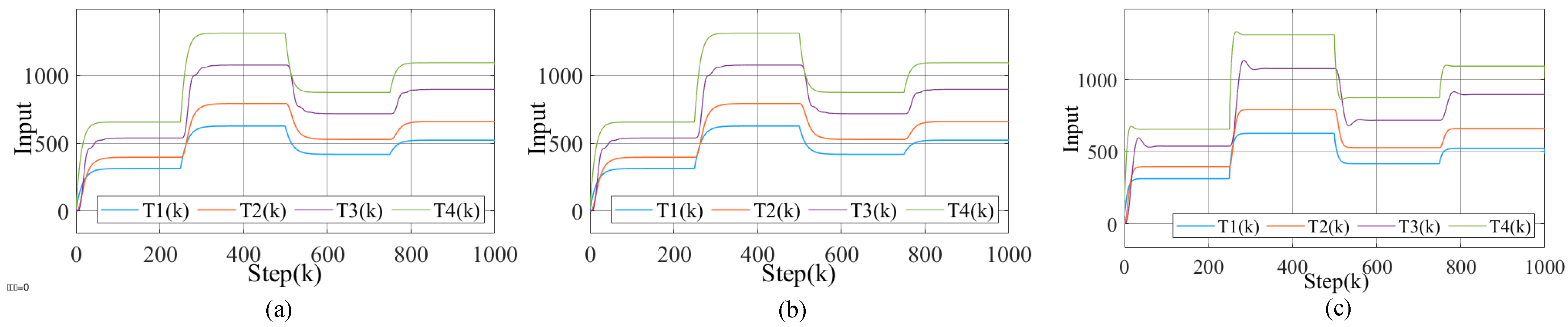
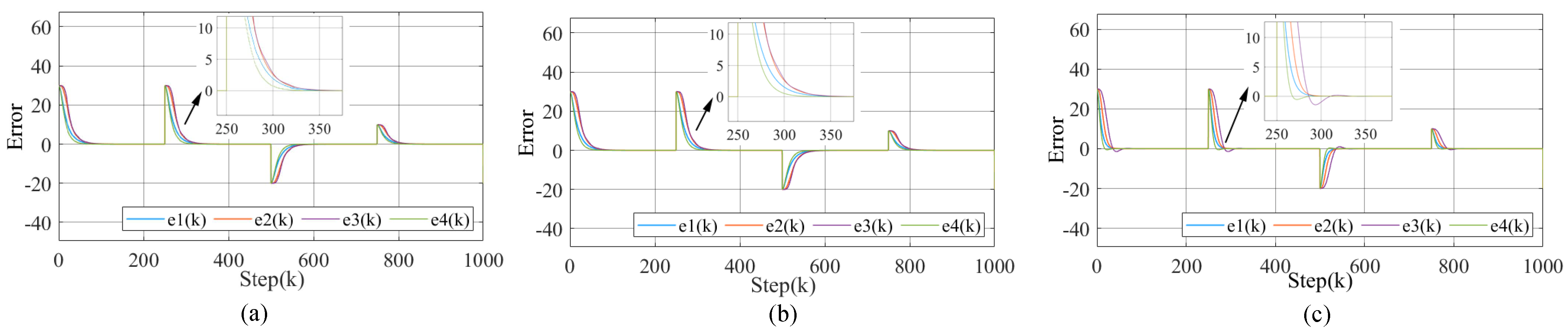
4. Experimental Simulation
4.1. Numerical Simulation Comparison
- (1)
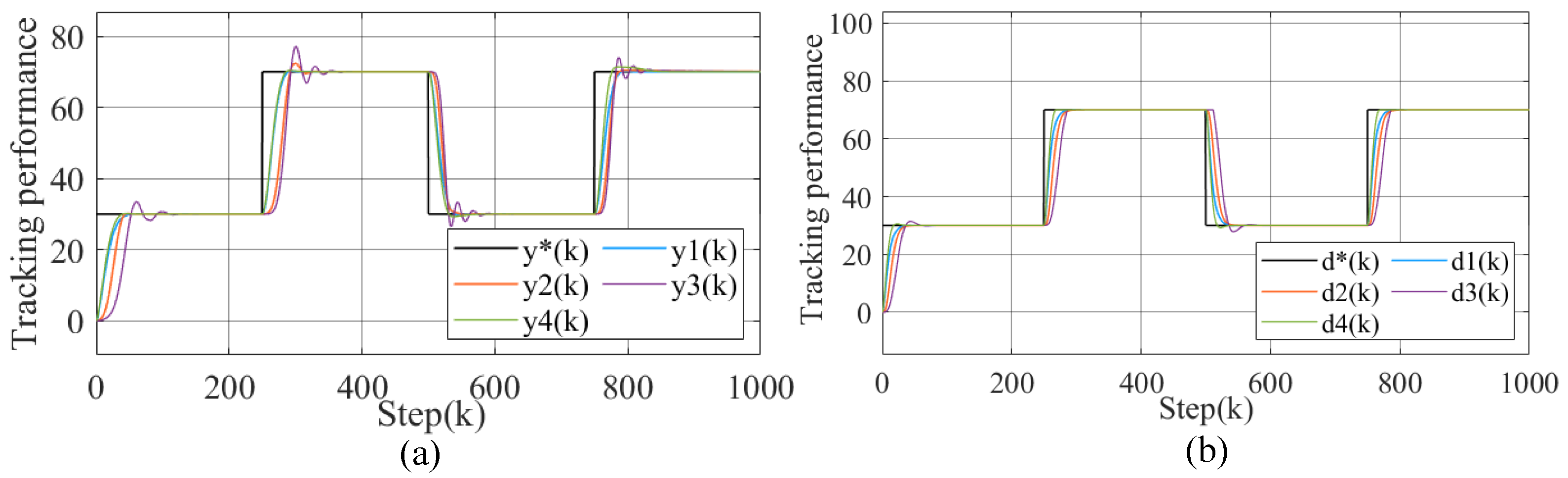
- Square wave trajectory tracking
- (2)
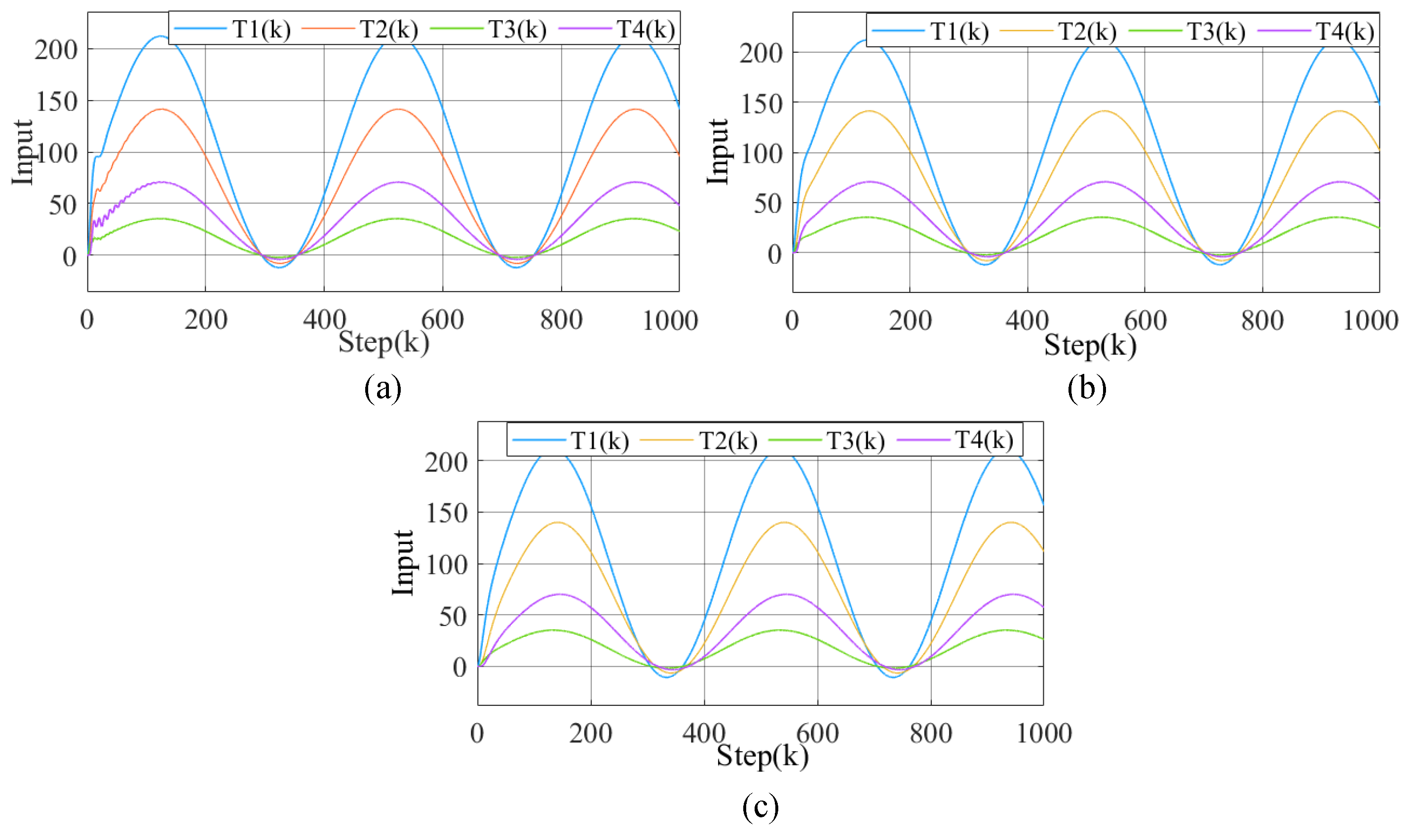
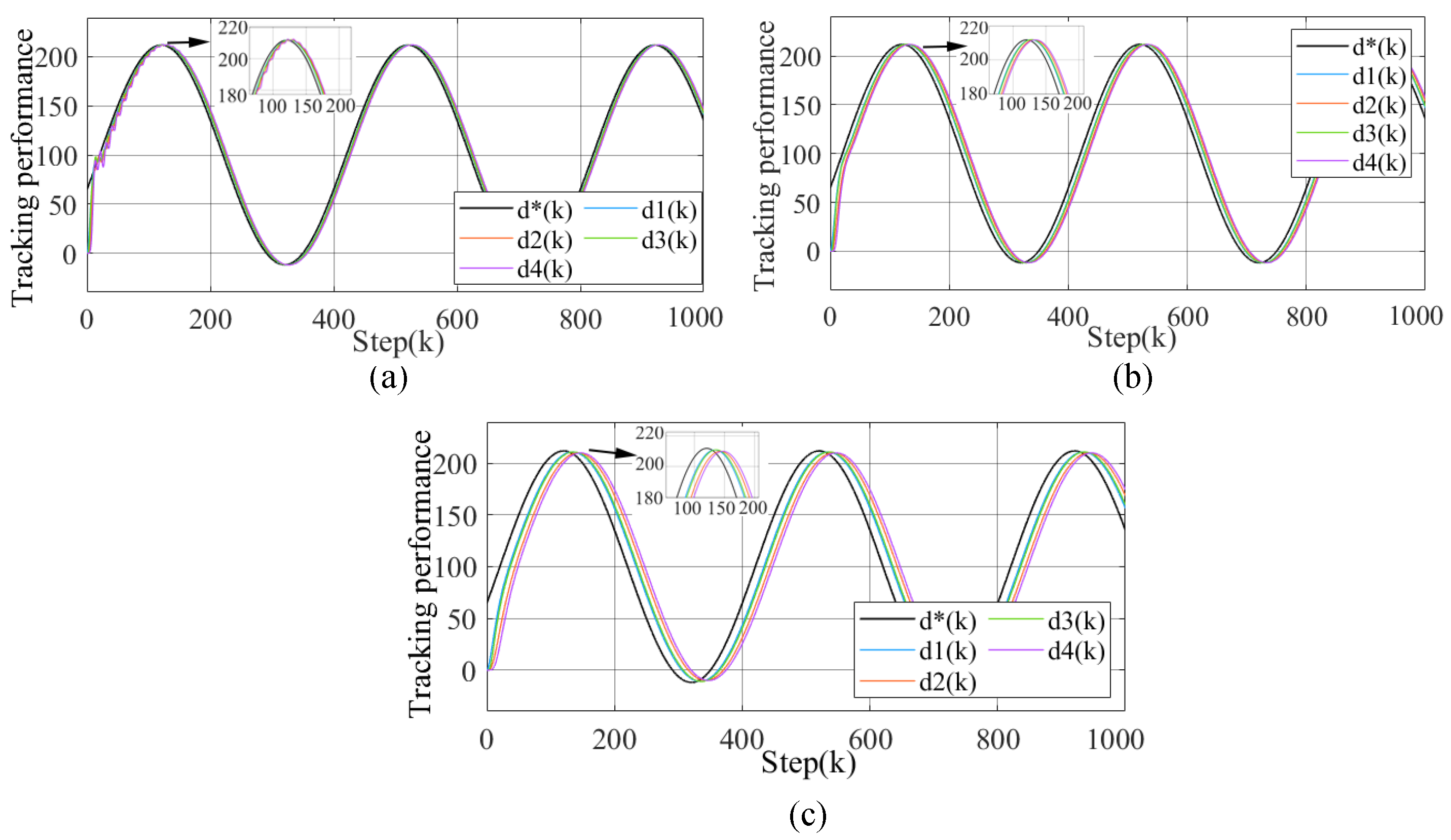
- Time-varying trajectory tracking
4.2. CarSim Simulation
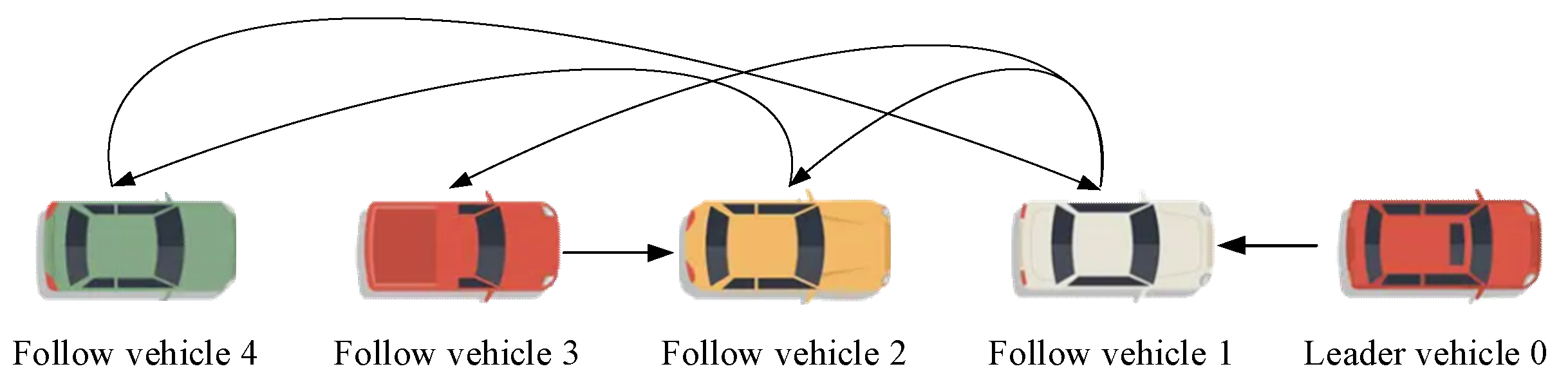
- (1).
- The speed of all vehicles would reach the speed of the leader vehicle to ensure that the speed difference tends to zero;
- (2).
- The positions of all vehicles would form a fixed vehicle spacing in a given way and ensure spacing safety.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Wei, Y.; Avcı, C.; Liu, J.; Belezamo, B.; Aydın, N.; Li, P.T.; Zhou, X. Dynamic programming-based multi-vehicle longitudinal trajectory optimization with simplified car following models. Transp. Res. Part B Methodol. 2017, 106, 102–129. [Google Scholar] [CrossRef]
- Wang, Z.; Bian, Y.; Shladover, S.E.; Wu, G.; Li, S.E.; Barth, M.J. A survey on cooperative longitudinal motion control of multiple connected and automated vehicles. IEEE Intell. Transp. Syst. Mag. 2019, 12, 4–24. [Google Scholar] [CrossRef] [Green Version]
- Hu, L.; Zhou, X.; Zhang, X.; Wang, F.; Li, Q.; Wu, W. A review on key challenges in intelligent vehicles: Safety and driver-oriented features. IET Intell. Transp. Syst. 2021, 15, 1093–1105. [Google Scholar] [CrossRef]
- Xie, H.; Xiao, P. Cooperative Adaptive Cruise Algorithm Based on Trajectory Prediction for Driverless Buses. Machines 2022, 10, 893. [Google Scholar] [CrossRef]
- Kneissl, M.; Madhusudhanan, A.K.; Molin, A.; Esen, H.; Hirche, S. A multi-vehicle control framework with application to automated valet parking. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5697–5707. [Google Scholar] [CrossRef]
- Sancar, F.E.; Fidan, B.; Huissoon, J.P.; Waslander, S.L. MPC based collaborative adaptive cruise control with rear end collision avoidance. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; IEEE: New York, NY, USA, 2014; pp. 516–521. [Google Scholar]
- Alam, A.; Mårtensson, J.; Johansson, K.H. Experimental evaluation of decentralized cooperative cruise control for heavy-duty vehicle platooning. Control Eng. Pract. 2015, 38, 11–25. [Google Scholar] [CrossRef]
- Xu, L.; Zhuang, W.; Yin, G.; Bian, C. Distributed formation control of homogeneous vehicle platoon considering vehicle dynamics. Int. J. Automot. Technol. 2019, 20, 1103–1112. [Google Scholar] [CrossRef]
- Wen, S.; Guo, G. Control of leader-following vehicle platoons with varied communication range. IEEE Trans. Intell. Veh. 2019, 5, 240–250. [Google Scholar] [CrossRef]
- Wang, J.; Luo, X.; Wang, L.; Zuo, Z.; Guan, X. Integral sliding mode control using a disturbance observer for vehicle platoons. IEEE Trans. Ind. Electron. 2019, 67, 6639–6648. [Google Scholar] [CrossRef]
- Guo, K.; Jiang, J.; Li, Z. Diffusion and persistence of rotor/stator synchronous full annular rub response under weak random perturbations. J. Vib. Eng. Technol. 2020, 8, 599–611. [Google Scholar] [CrossRef]
- Safonov, M.G.; Tsao, T.C. The unfalsified control concept and learning. IEEE Trans. Autom. Control 1997, 42, 843–847. [Google Scholar] [CrossRef]
- Campestrini, L.; Eckhard, D.; Chia, L.A.; Boeira, E. Unbiased MIMO VRFT with application to process control. J. Process Control 2016, 39, 35–49. [Google Scholar] [CrossRef]
- Li, M.; Zhu, Y.; Yang, K.; Yang, L.; Hu, C.; Mu, H. Convergence rate oriented iterative feedback tuning with application to an ultraprecision wafer stage. IEEE Trans. Ind. Electron. 2018, 66, 1993–2003. [Google Scholar] [CrossRef]
- Sun, X.; Jin, Z.; Chen, L.; Yang, Z. Disturbance rejection based on iterative learning control with extended state observer for a four-degree-of-freedom hybrid magnetic bearing system. Mech. Syst. Signal Process. 2021, 153, 107465. [Google Scholar] [CrossRef]
- Liu, S.; Hou, Z.; Tian, T.; Deng, Z.; Li, Z. A novel dual successive projection-based model-free adaptive control method and application to an autonomous car. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3444–3457. [Google Scholar] [CrossRef]
- Chu, W.; Guan, X.; Cai, Z.; Gao, L. Real-time volume control for interactive network traffic replay. Comput. Netw. 2013, 57, 1611–1629. [Google Scholar] [CrossRef]
- Zhang, H.; Zhou, J.; Sun, Q.; Guerrero, J.M.; Ma, D. Data-driven control for interlinked AC/DC microgrids via model-free adaptive control and dual-droop control. IEEE Trans. Smart Grid 2015, 8, 557–571. [Google Scholar] [CrossRef] [Green Version]
- Chi, R.-H.; Hou, Z.-S. A model-free periodic adaptive control for freeway traffic density via ramp metering. Acta Autom. Sin. 2010, 36, 1029–1033. [Google Scholar] [CrossRef]
- Pang, Z.H.; Liu, G.P.; Zhou, D.; Sun, D. Data-based predictive control for networked nonlinear systems with network-induced delay and packet dropout. IEEE Trans. Ind. Electron. 2015, 63, 1249–1257. [Google Scholar] [CrossRef]
- Devi, V.S.; Ravi, T.; Priya, S.B. Cluster based data aggregation scheme for latency and packet loss reduction in WSN. Comput. Commun. 2020, 149, 36–43. [Google Scholar] [CrossRef]
- Sun, Z.; Tao, R.; Xiong, N.; Pan, X. CS-PLM: Compressive sensing data gathering algorithm based on packet loss matching in sensor networks. Wirel. Commun. Mob. Comput. 2018, 2018, 5131949. [Google Scholar] [CrossRef]
- Zhichao, C.; Ruju, Z. Classification of Irreducible Z+ Modules of a Z+ Ring Using Matrix Equations. Symmetry 2022, 14, 2598. [Google Scholar]
- Hou, Z.; Jin, S. A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Trans. Control Syst. Technol. 2010, 19, 1549–1558. [Google Scholar] [CrossRef]
- He, S.; Fang, H.; Zhang, M.; Liu, F.; Luan, X.; Ding, Z. Online policy iterative-based H∞ optimization algorithm for a class of nonlinear systems. Inf. Sci. 2019, 495, 1–13. [Google Scholar] [CrossRef]
- Yue, S.; Li, Y.; Wei, A.; Zhao, J. An Efficient Method for Split Quaternion Matrix Equation X − Af(X)B = C. Symmetry 2022, 14, 1158. [Google Scholar] [CrossRef]
- Amiri, I.; Ali, J. Simulation of the single ring resonator based on the Z-transform method theory. Quantum Matter 2014, 3, 519–522. [Google Scholar] [CrossRef]
- Zhou, N.; Xia, Y. Coordination control design for formation reconfiguration of multiple spacecraft. IET Control Theory Appl. 2015, 9, 2222–2231. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter Settings |
|---|---|
| cMFAC | , , , , , =3 |
| Z-N-PID | , , |
| GWO-PID | , , |
| Algorithm | Parameter Settings |
|---|---|
| MFAC | , , , , , = 3 |
| cMFAC | , , , , , = 3, = 70, = 1600, |
| Vehicle | 1 | 2 | 3 |
|---|---|---|---|
| Total mass | 1430 kg | 1590 kg | 1800 kg |
| Engine power | 150 kW | 200 kW | 150 kW |
| Brake torque | 450 N·m | 500 N·m | 450 N·m |
| Length | 2650 mm | 2950 mm | 3000 mm |
| Windward area | 3.06 m2 | 3.38 m2 | 3.18 m2 |
| Road resistance coefficient | 0.15 | 0.15 | 0.15 |
| Air density | 1.29 | 1.29 | 1.29 |
| slope | - | - | - |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.9 | 0.6 | ||
| 6.5 | 1 | ||
| 0.5 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Li, Z.; Liu, S.; Li, Z.; Sun, D. A Novel Multi-Agent Model-Free Adaptive Control Algorithm for a Class of Multivehicle Systems with Constraints. Symmetry 2023, 15, 168. https://doi.org/10.3390/sym15010168
Wu L, Li Z, Liu S, Li Z, Sun D. A Novel Multi-Agent Model-Free Adaptive Control Algorithm for a Class of Multivehicle Systems with Constraints. Symmetry. 2023; 15(1):168. https://doi.org/10.3390/sym15010168
Chicago/Turabian StyleWu, Lipu, Zhen Li, Shida Liu, Zhijun Li, and Dehui Sun. 2023. "A Novel Multi-Agent Model-Free Adaptive Control Algorithm for a Class of Multivehicle Systems with Constraints" Symmetry 15, no. 1: 168. https://doi.org/10.3390/sym15010168