
Exact Traveling Wave Solutions in a Generalized Harry Dym Type Equation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
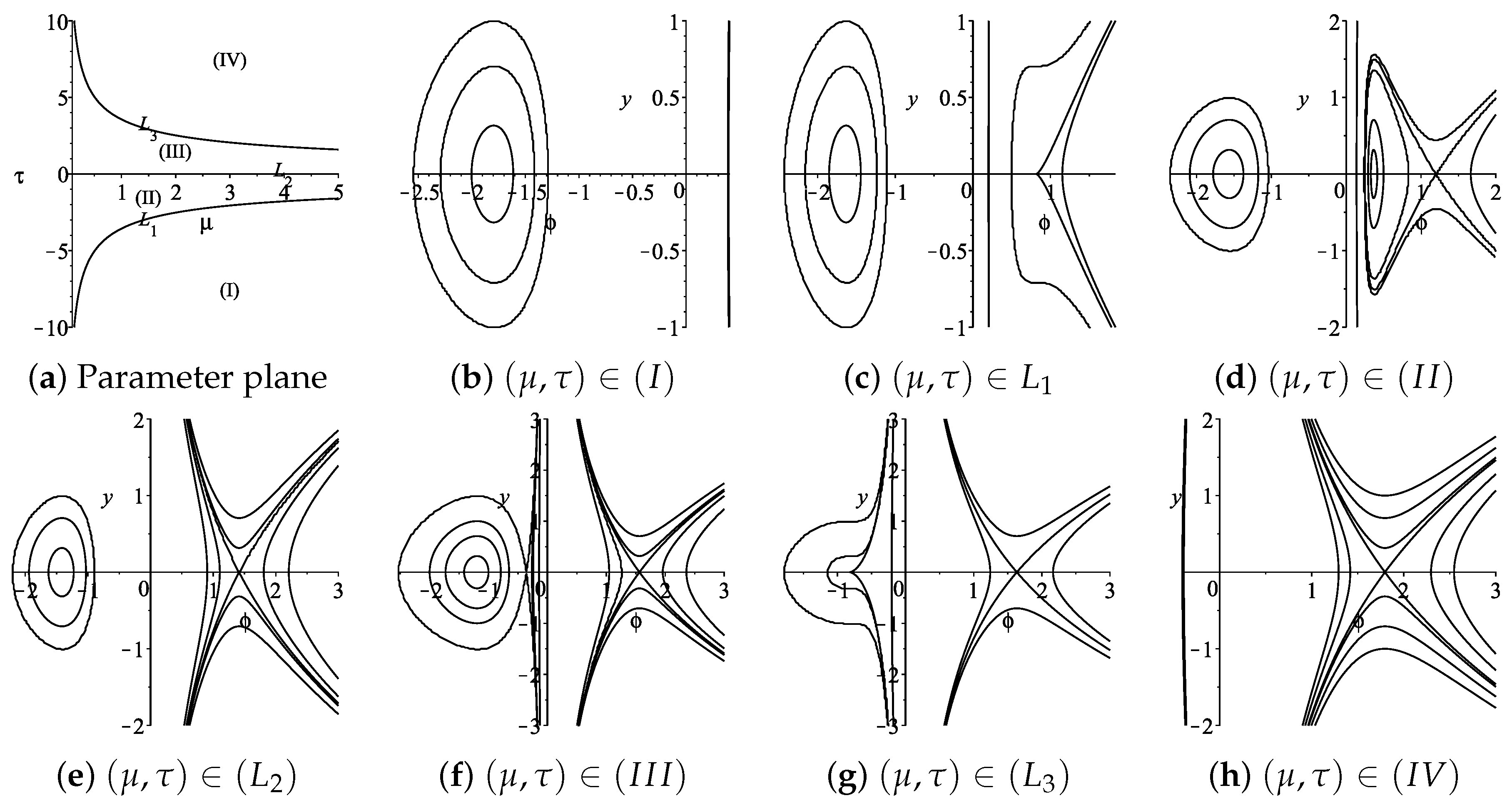
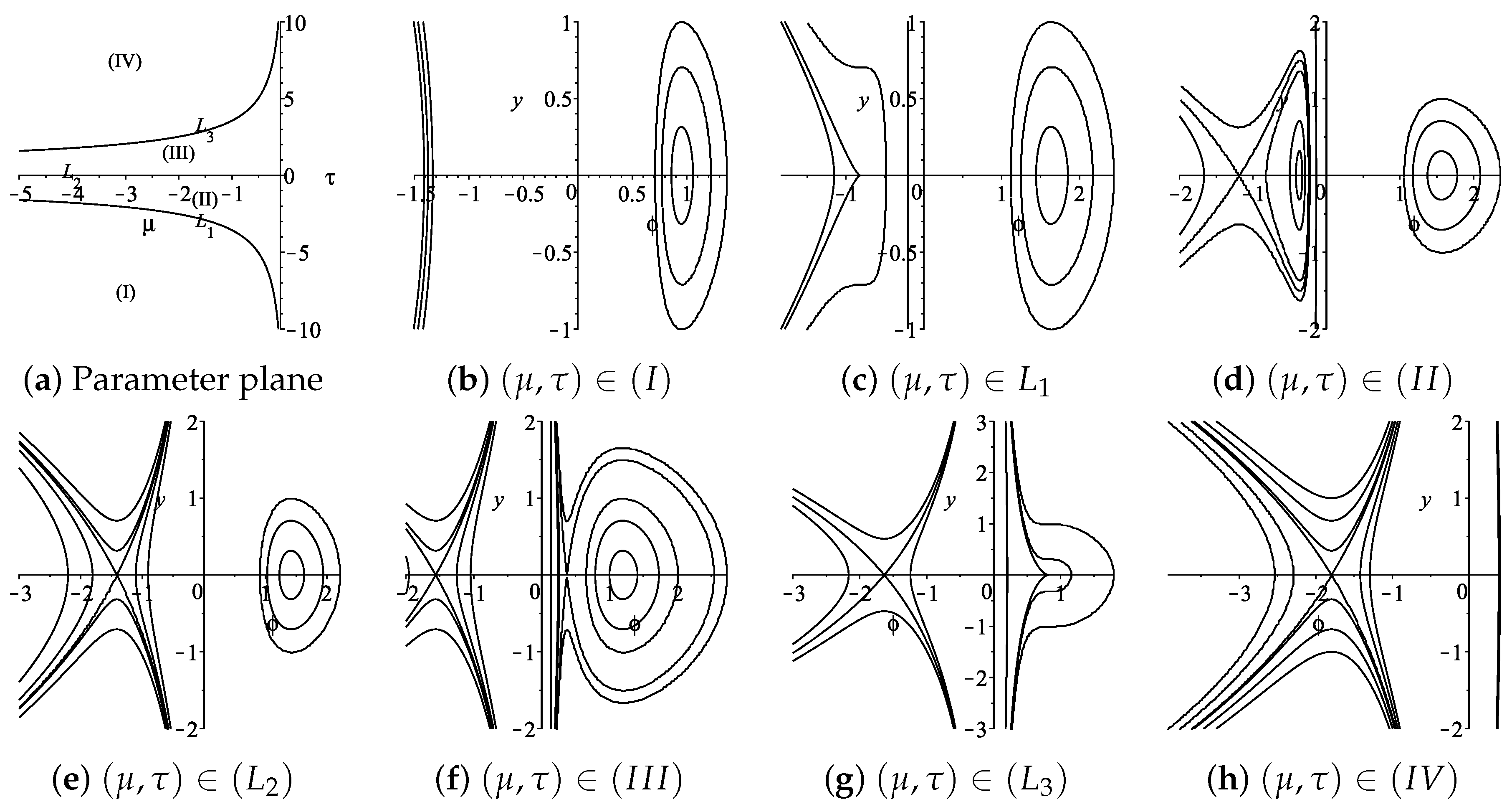
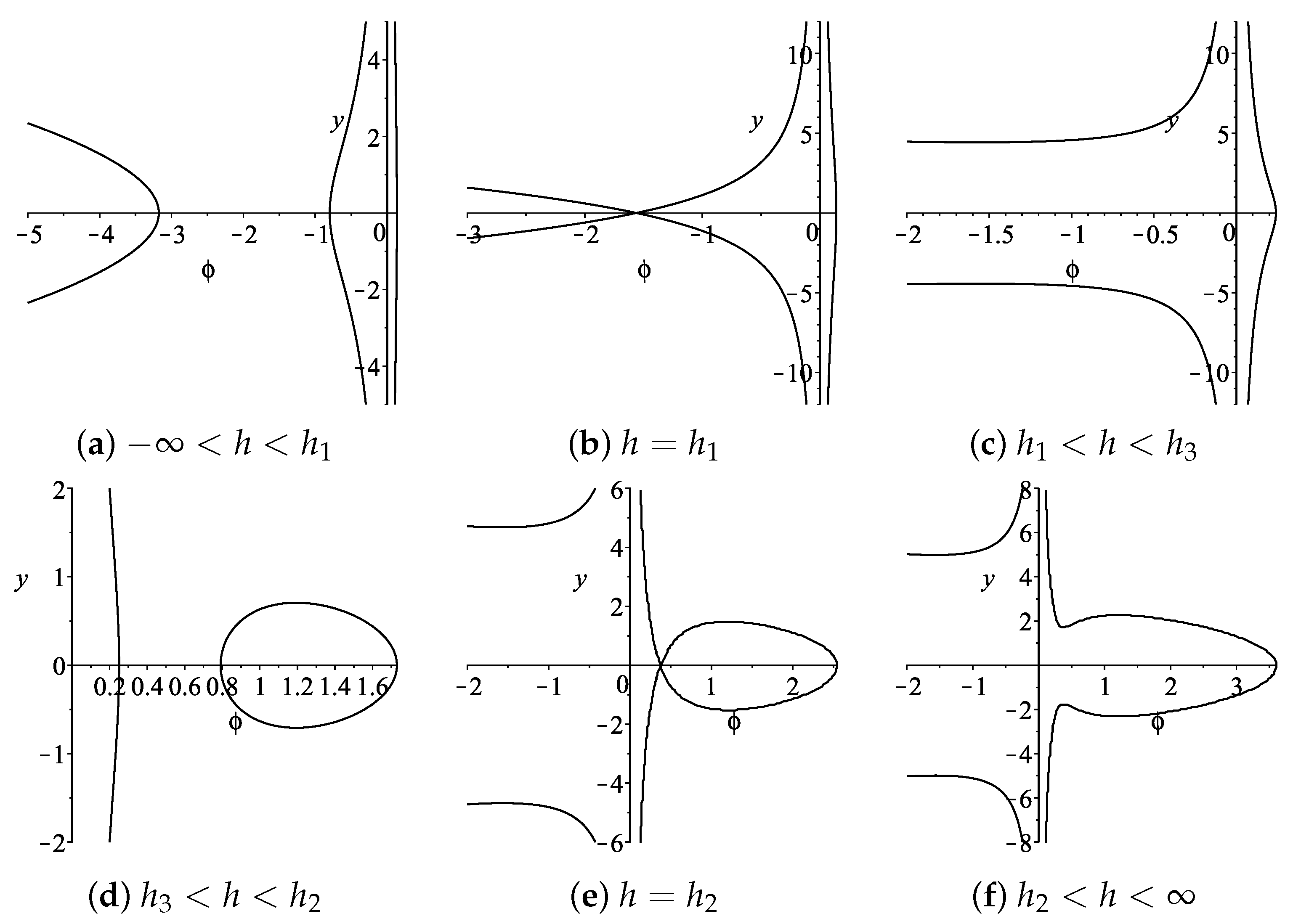
2. Bifurcation of Phase Portraits
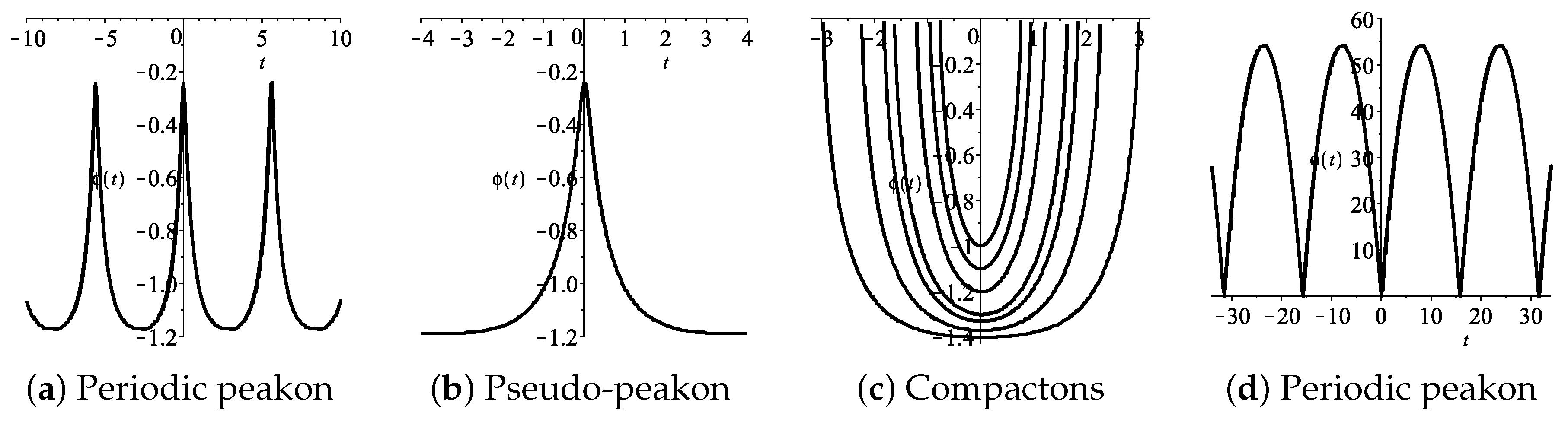
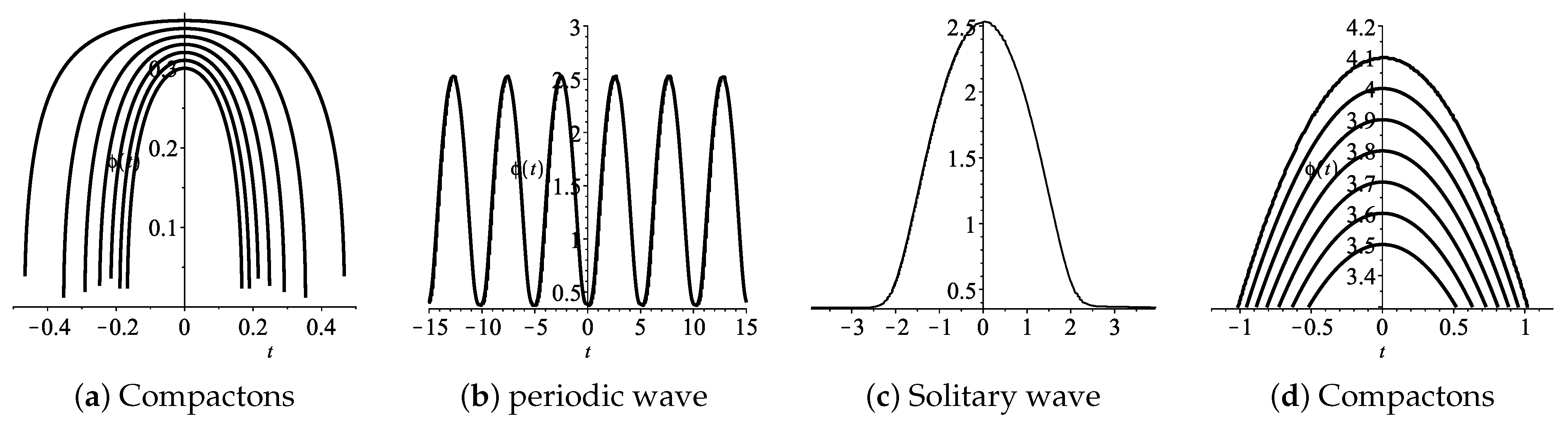
3. Exact Pseudo-Peakons, Periodic Peakons and Compactons Determined by the Orbits When
3.1. : Exact Periodic Solution Family Defined by the Level Curves
3.2. : Two Exact Periodic Solution Families Defined by the Level Curves , Respectively, and a Pseudo-Peakon or Solitary Wave Solution Defined by
3.3. : An Exact Compacton Solution Family Defined by and a Periodic Solution Family Defined by the Level Curves
3.4. : Two Exact Compacton Solution Families Defined by and a Periodic Solution Family Defined by the Level Curves , et al.
3.5. : Exact Compacton Solution Families Defined by , and Two Bounded Solutions Defined by the Level Curves
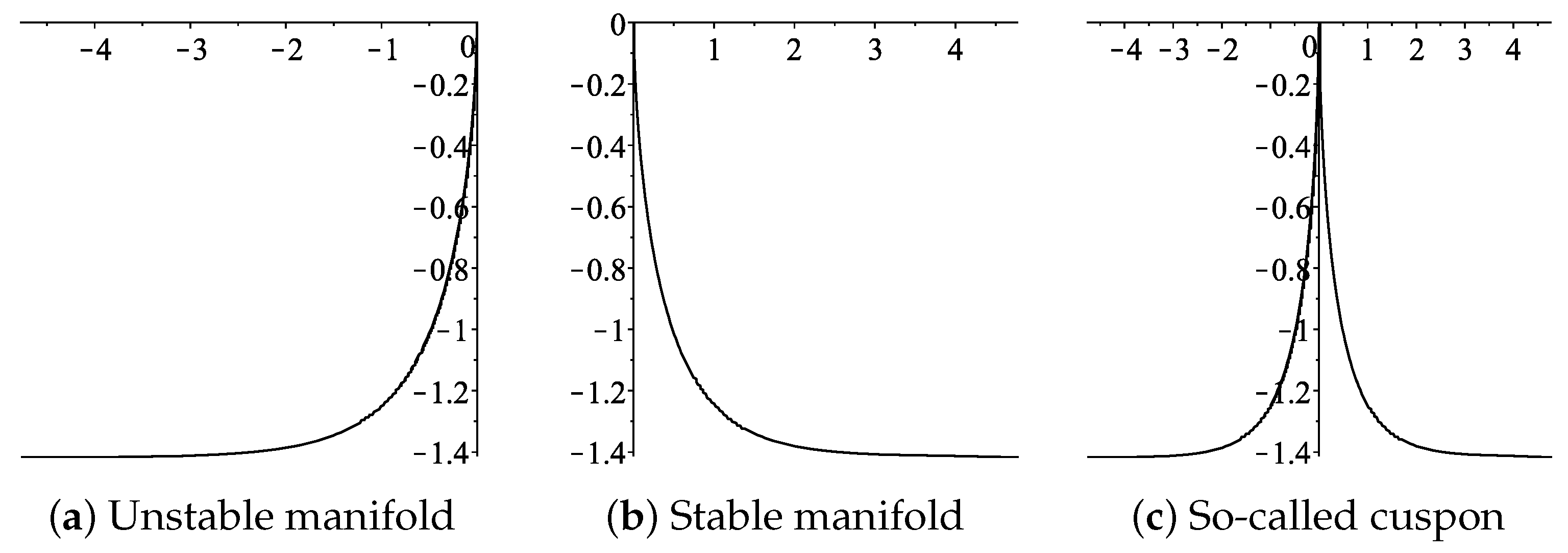
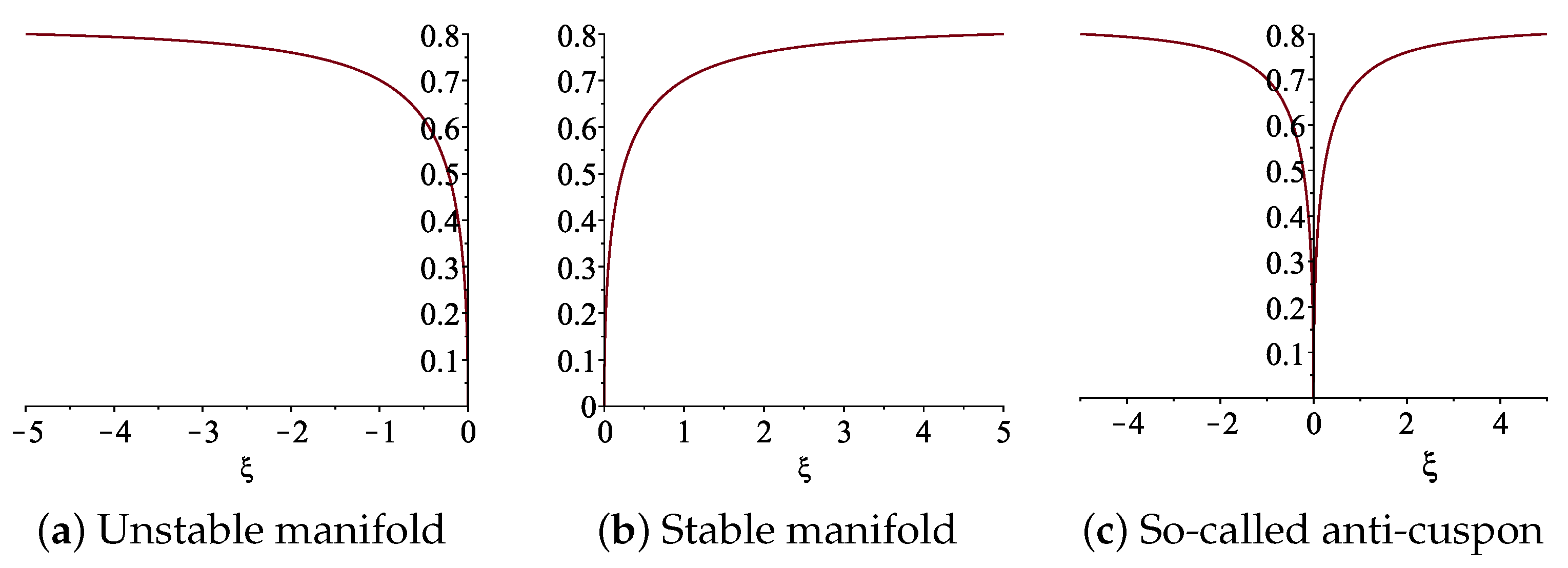
4. Exact Solitary Wave Solutions Determined by the Orbits When
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Camassa, R.; Holm, D.D. An integrable shallow water equation with peak solutions. Phys. Rev. Lett. 1993, 71, 1161–1164. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Camassa, R.; Holm, D.D.; Hyman, J.M. A new integrable shallow water equation. Adv. Appl. Mech. 1994, 31, 1–33. [Google Scholar]
- Camassa, R.; Hyman, J.M.; Luce, B.P. Nonlinear waves and solitons in physical sysytems. Physics D 1998, 123, 1–20. [Google Scholar] [CrossRef]
- Li, J. Singular Nonlinear Traveling Wave Equations: Bifurcations and Exact Solutions; Science Press: Beijing, China, 2013. [Google Scholar]
- Li, J.; Qiao, Z. Peakon, pseudo-peakon and cuspon solutions for two generalized Cammasa-Holm equations. J. Math. Phys. 2013, 54, 123501. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Chen, G. On a class of singular nonlinear traveling wave equations. Int. J. Bifurc. Chaos 2007, 17, 4049–4065. [Google Scholar] [CrossRef]
- Li, J.; Zhu, W.; Chen, G. Understanding peakons, periodic peakons and compactons via a shallow water wave equation. Int. J. Bifurc. Chaos 2016, 26, 1650207. [Google Scholar] [CrossRef]
- Li, J. Variform exact one-peakon solutions for some singular nonlinear traveling wave equations of the first kind. Int. J. Bifurc. Chaos 2014, 24, 1450160. [Google Scholar] [CrossRef] [Green Version]
- Geng, X.; Li, R.; Xue, B. A new integrable equation with peakons and cuspons and its bi-Hamiltonian structure. Appl. Math. Lett. 2015, 46, 64–69. [Google Scholar] [CrossRef]
- Oono, H. N soliton solution of Harry Dym equation by inverse scattering method. In Nonlinear Physics: Theory and Experiment; World Scientific Publishing: River Edge, NJ, USA, 1996; pp. 241–248. [Google Scholar]
- Fuchssteiner, B.; Schulze, T.; Carillo, S. Explicit solutions for the Harry Dym equation. J. Phys. A 1992, 25, 223–230. [Google Scholar] [CrossRef]
- Byrd, P.F.; Fridman, M.D. Handbook of Elliptic Integrals for Engineers and Scientists; Springer: Berlin, Germany, 1971. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, R.; Zhou, Y. Exact Traveling Wave Solutions in a Generalized Harry Dym Type Equation. Symmetry 2022, 14, 1480. https://doi.org/10.3390/sym14071480
Wu R, Zhou Y. Exact Traveling Wave Solutions in a Generalized Harry Dym Type Equation. Symmetry. 2022; 14(7):1480. https://doi.org/10.3390/sym14071480
Chicago/Turabian StyleWu, Rong, and Yan Zhou. 2022. "Exact Traveling Wave Solutions in a Generalized Harry Dym Type Equation" Symmetry 14, no. 7: 1480. https://doi.org/10.3390/sym14071480