
A Hybrid RBF Collocation Method and Its Application in the Elastostatic Symmetric Problems

Abstract
:1. Introduction
2. The HRBF-CM for Elastostatic Symmetric Problems
2.1. The Construction of HRBFs
2.2. The Elastostatic Equation
2.3. The HRBF Formulation
3. Numerical Examples
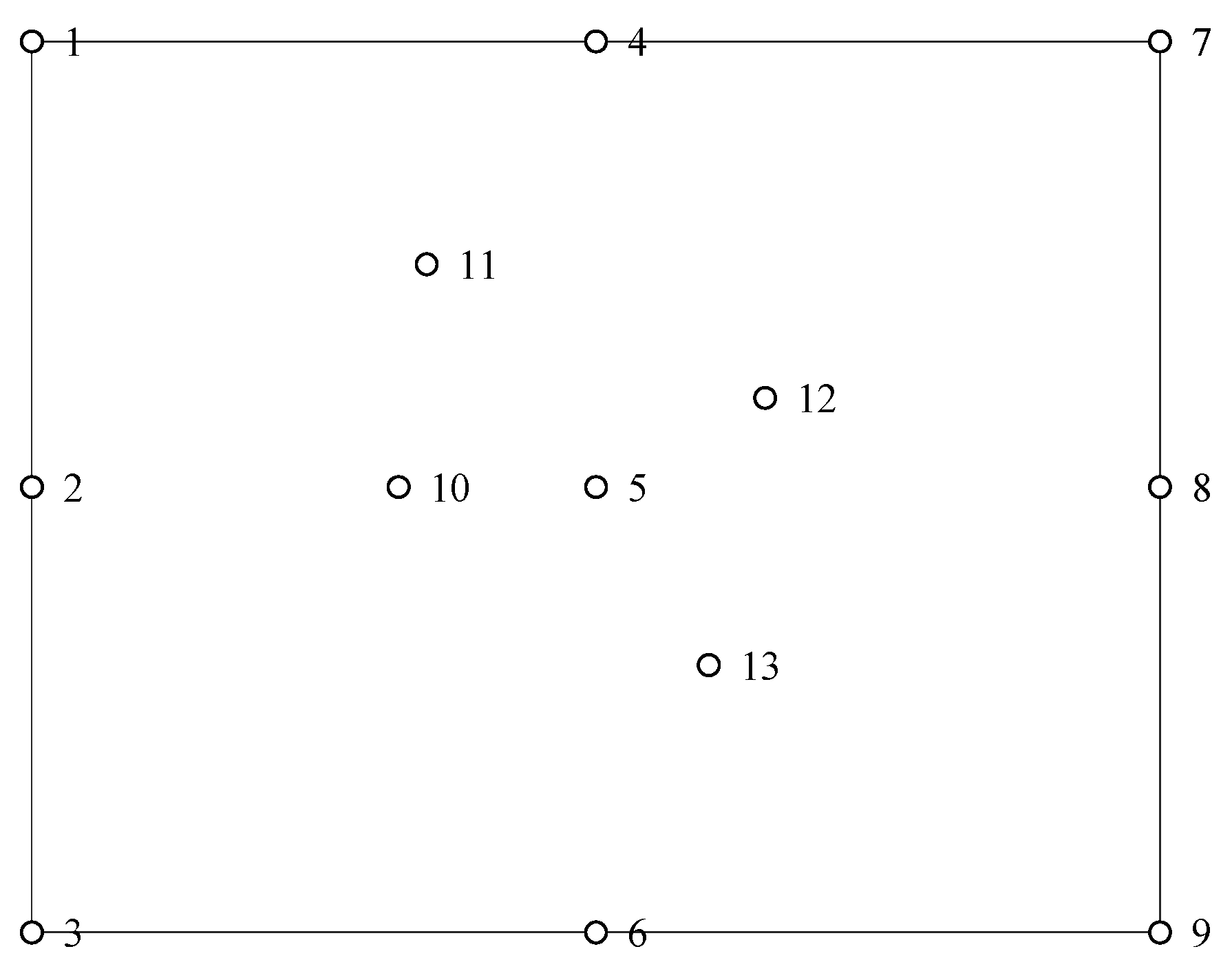
3.1. Patch Test
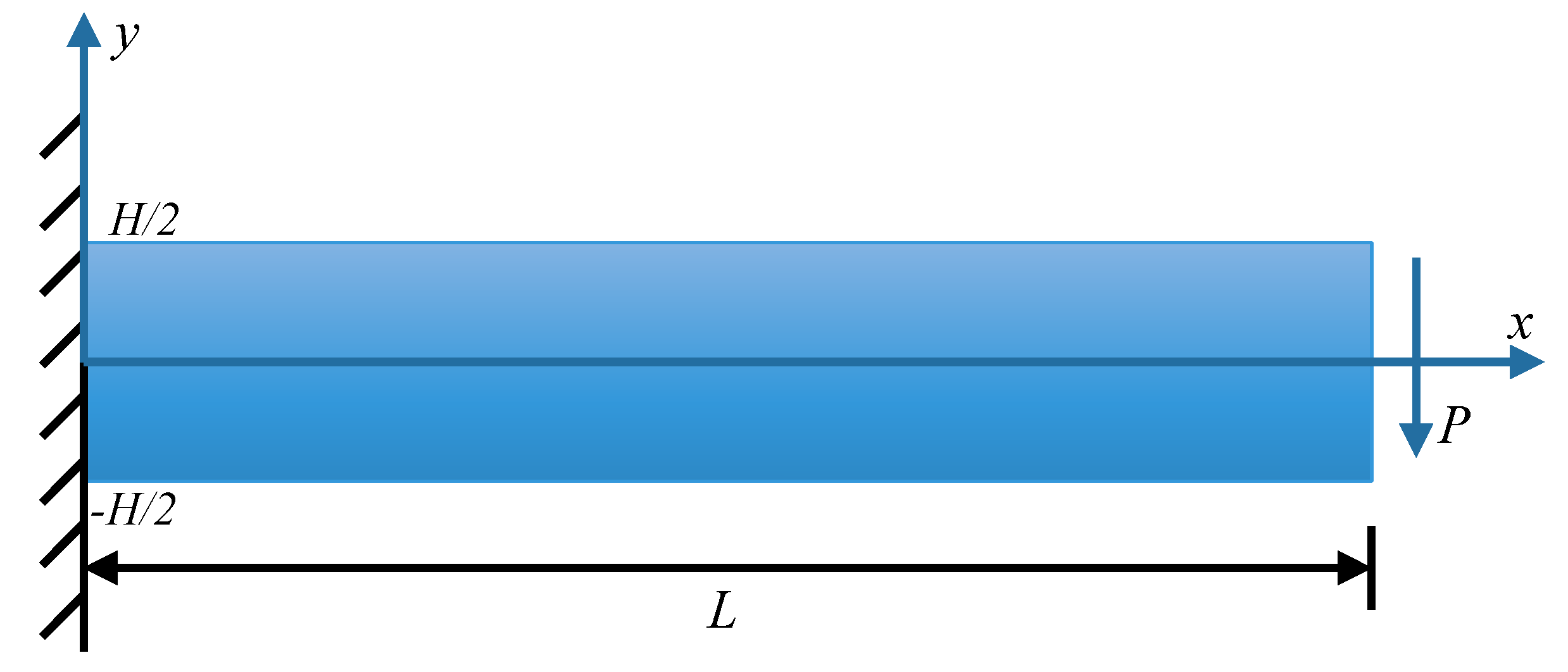
3.2. Cantilever Beam
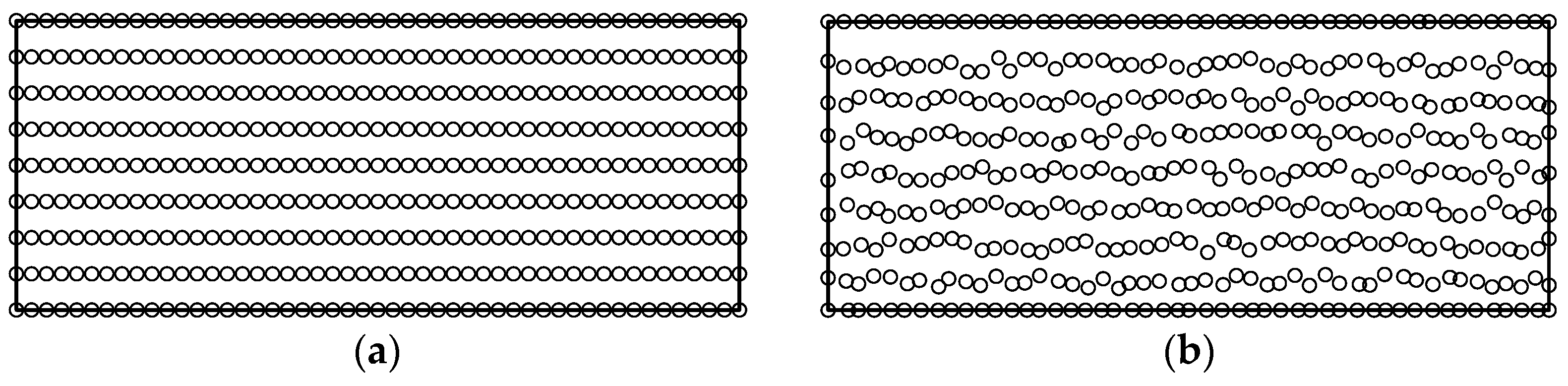
3.2.1. Effect of Irregular Node Distribution
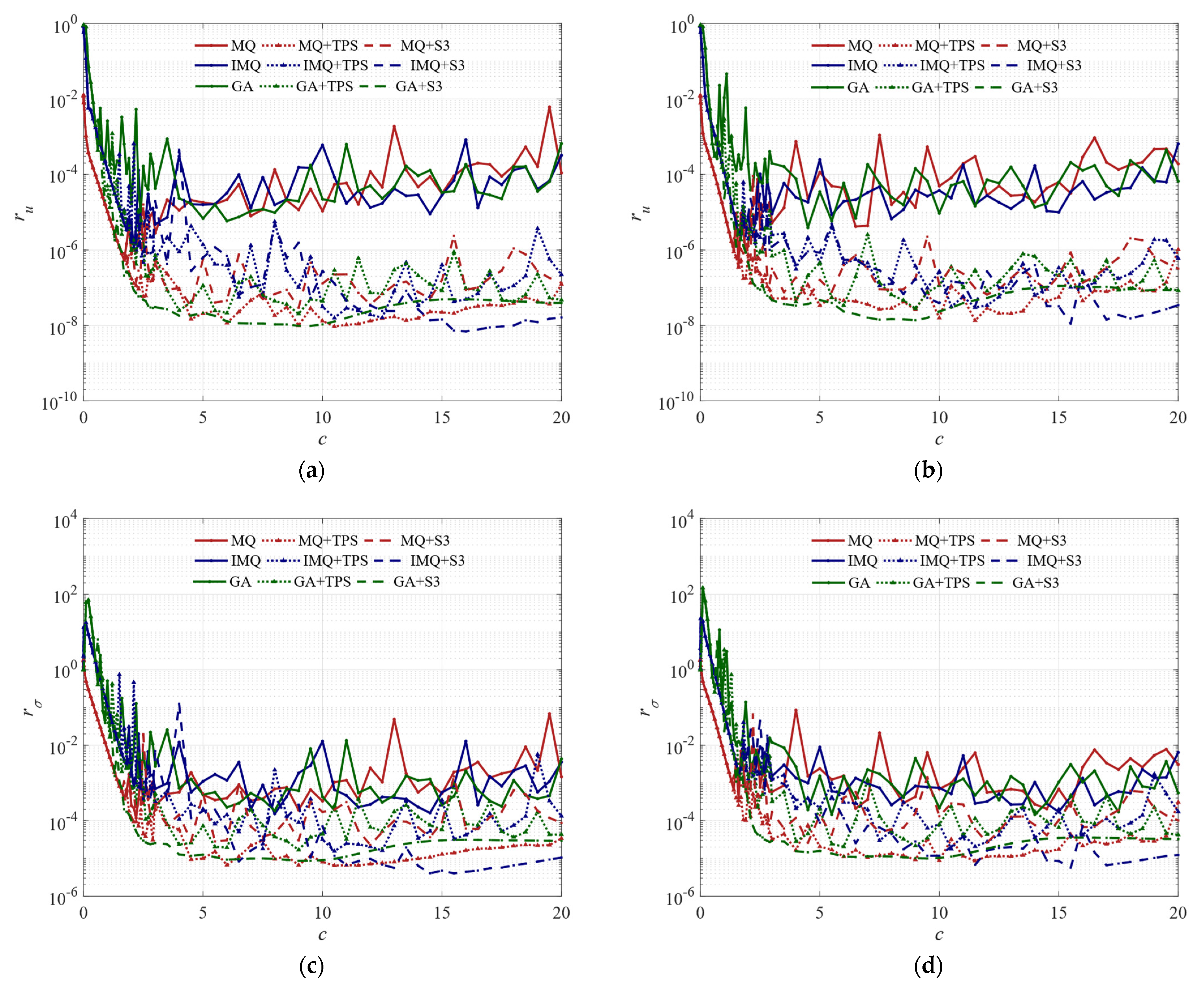
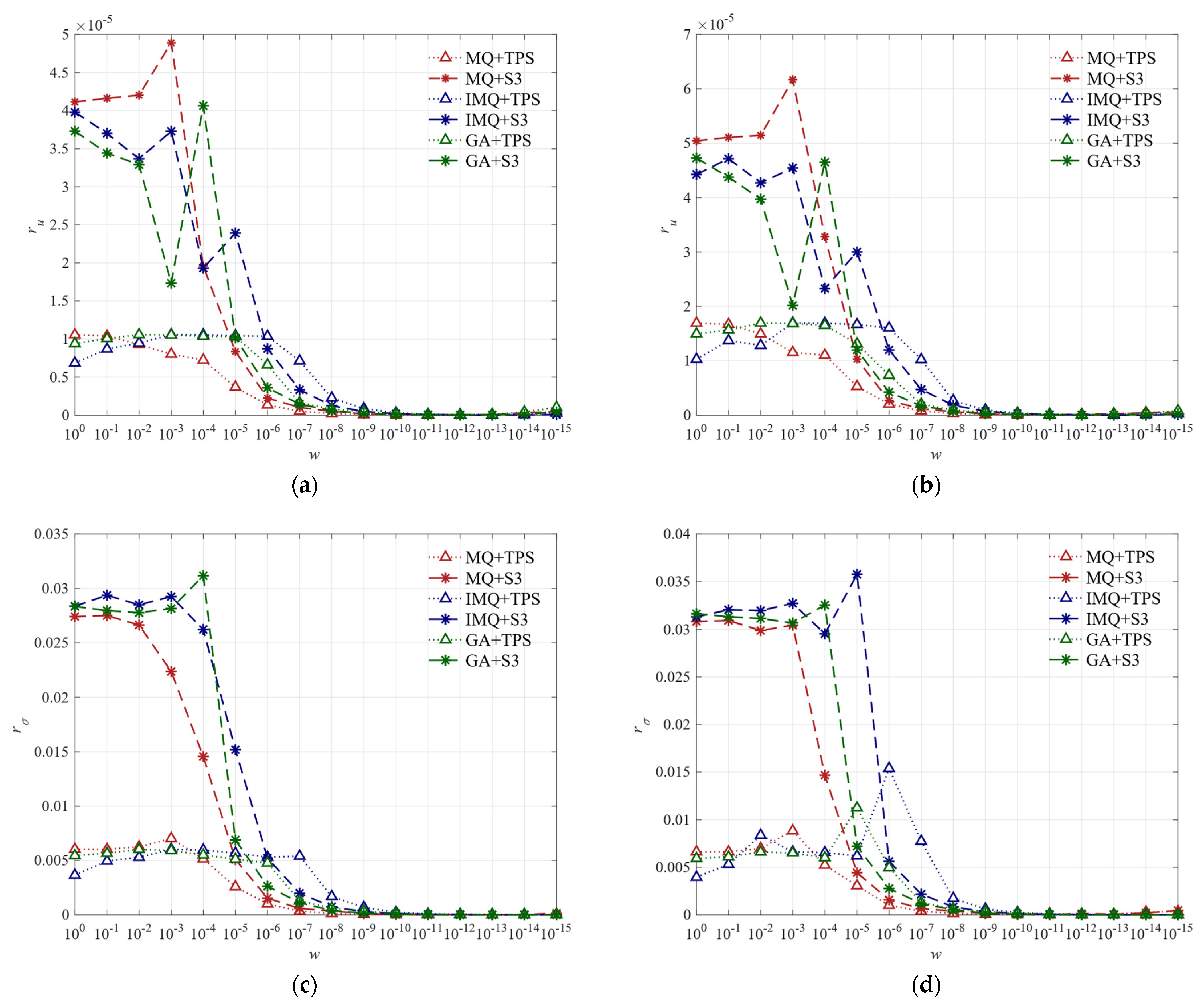
3.2.2. Effect of Parameters
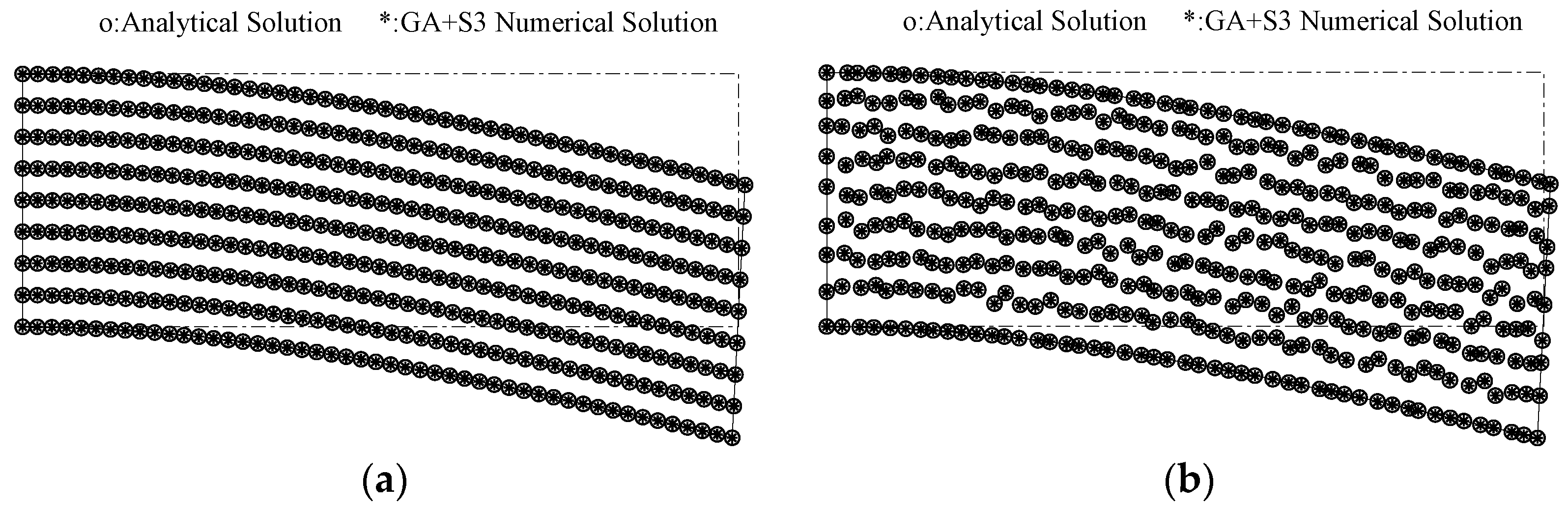
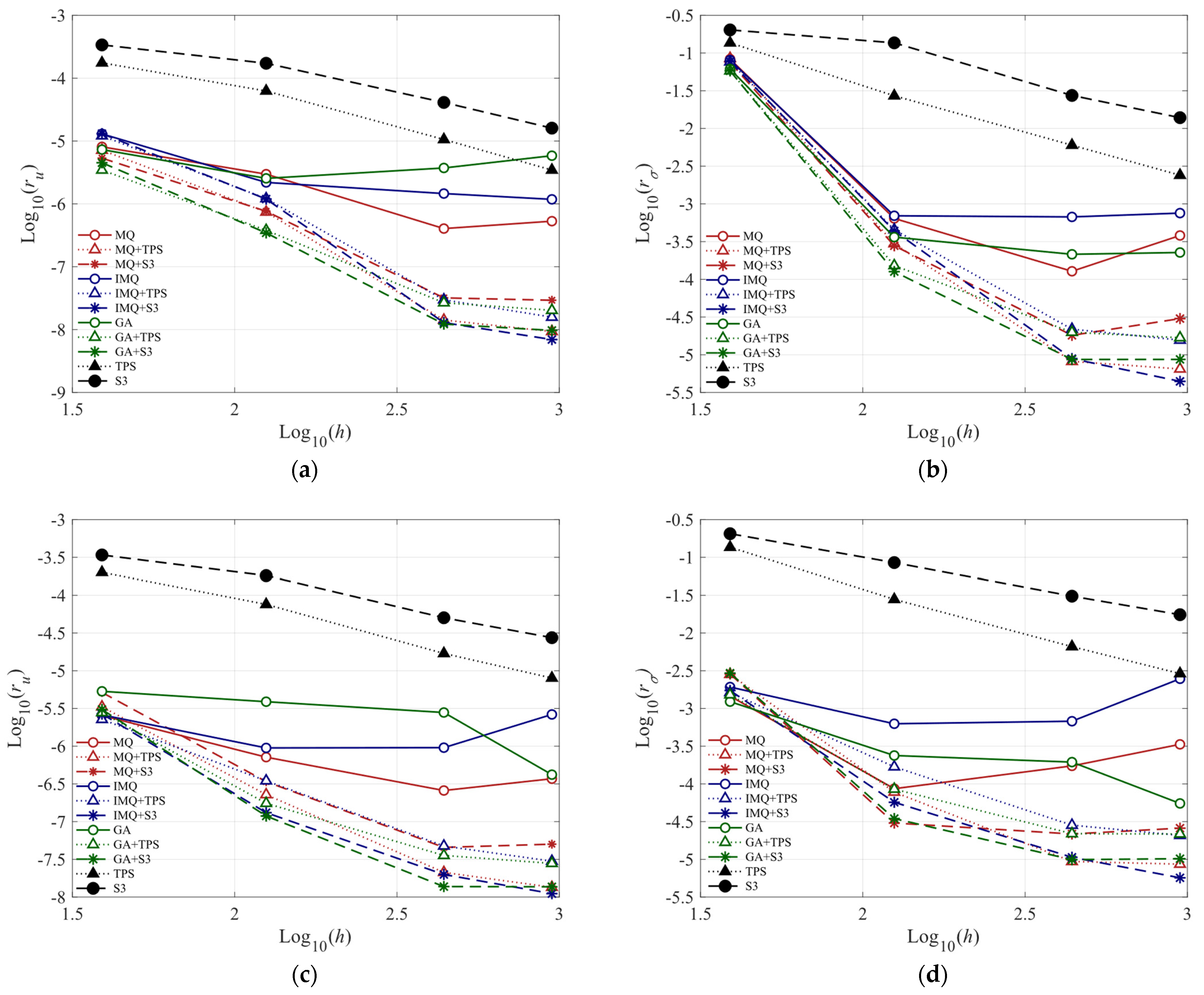
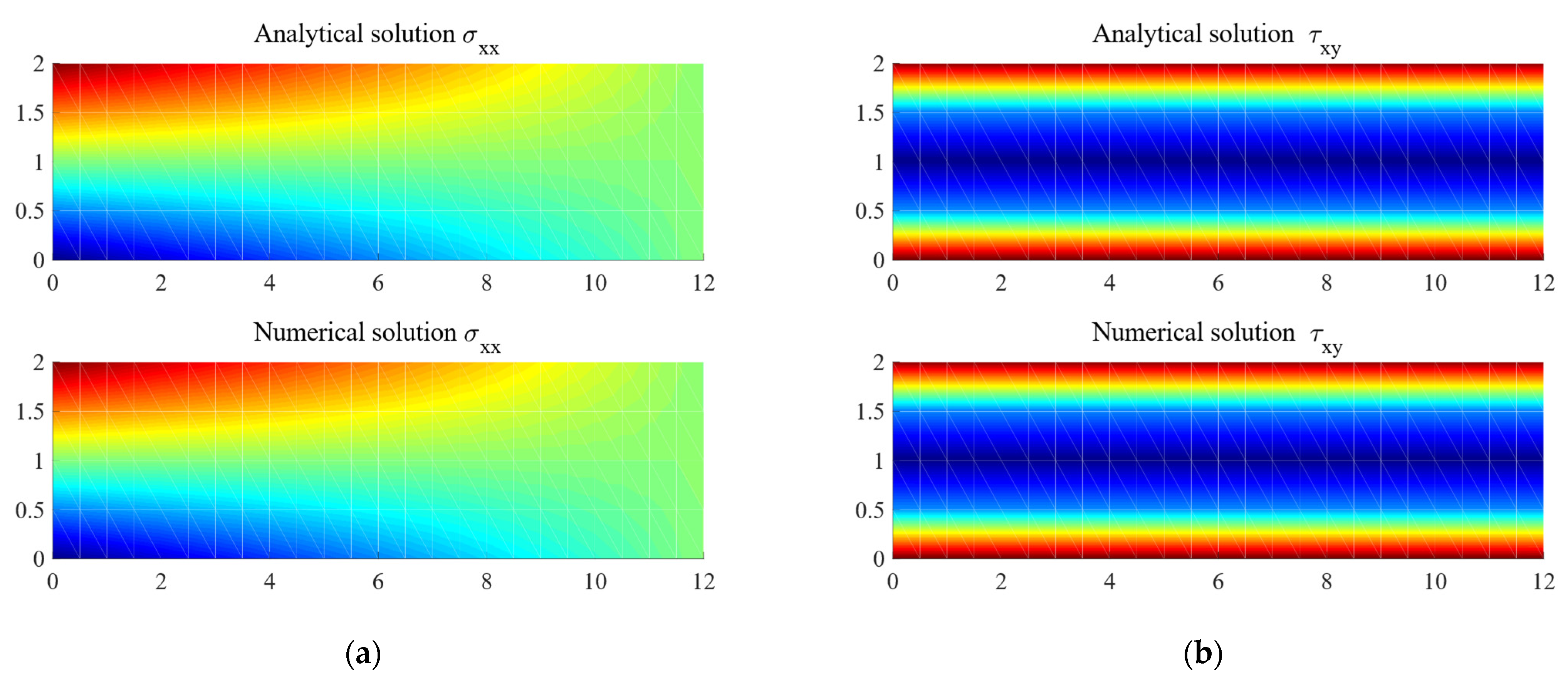
3.2.3. Convergence Analysis and Simulation
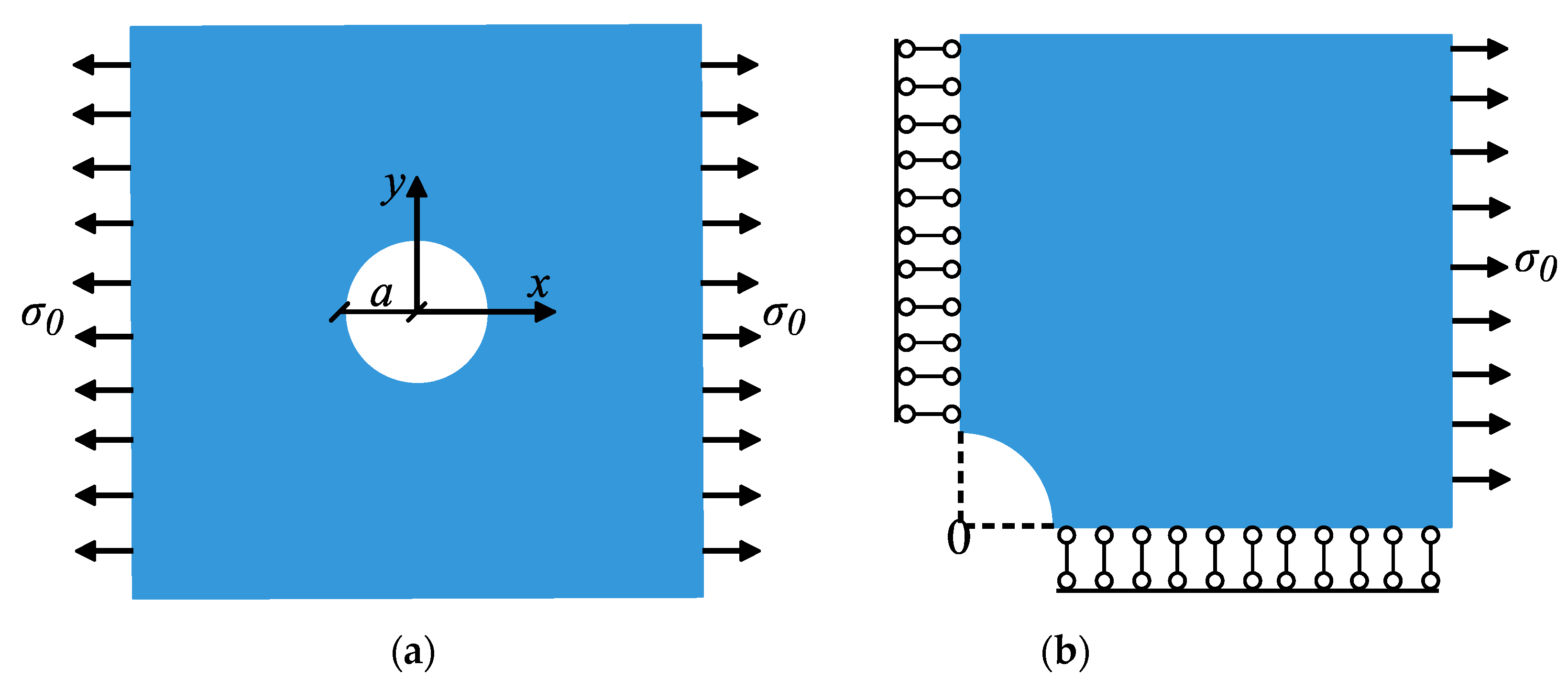
3.3. Plate with a Hole
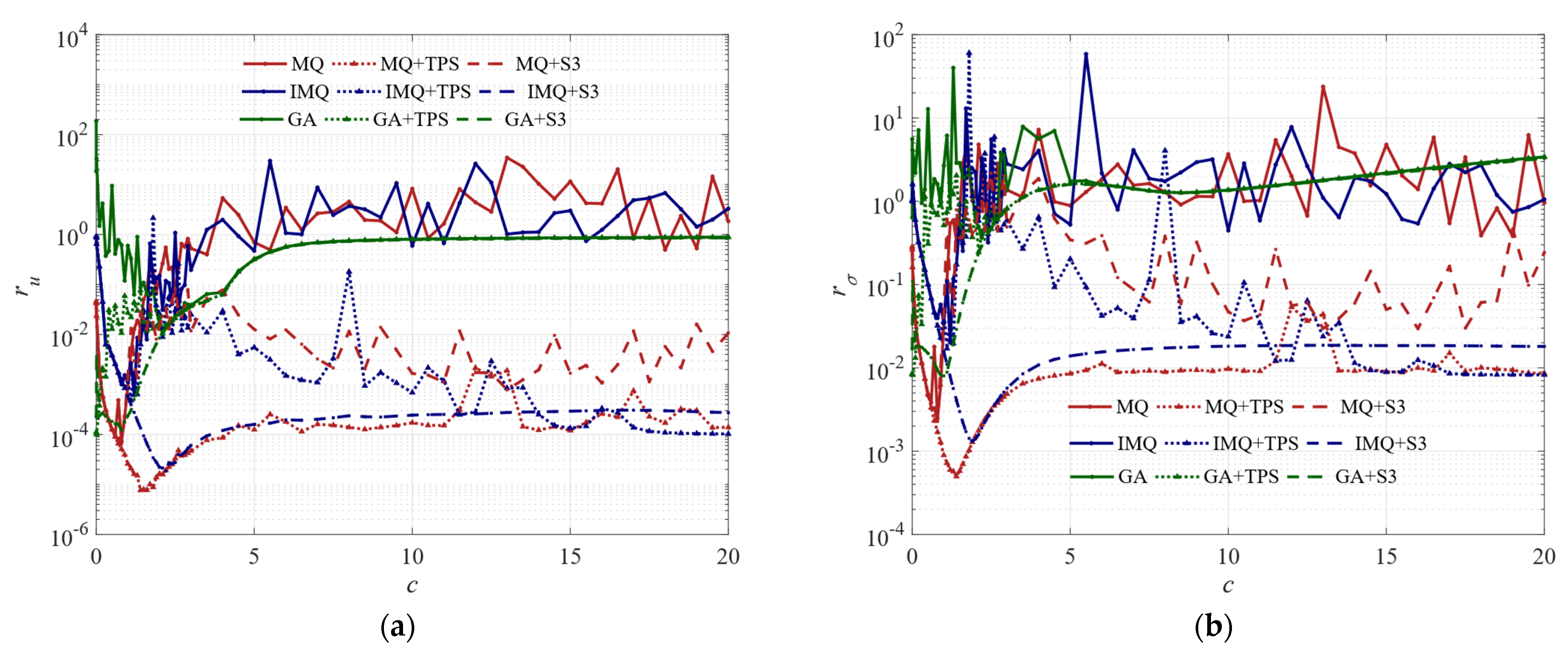
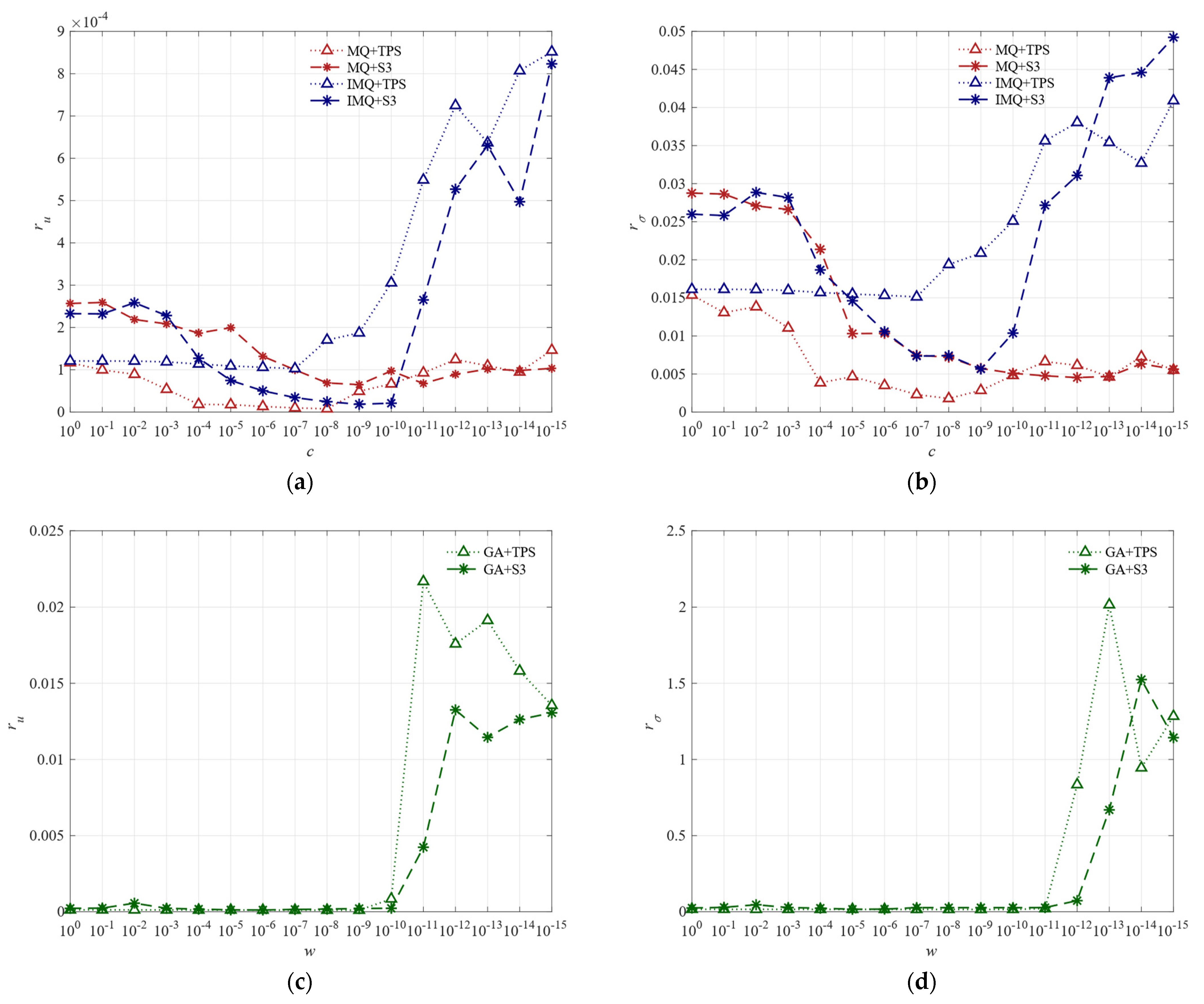
3.3.1. Effect of Parameters
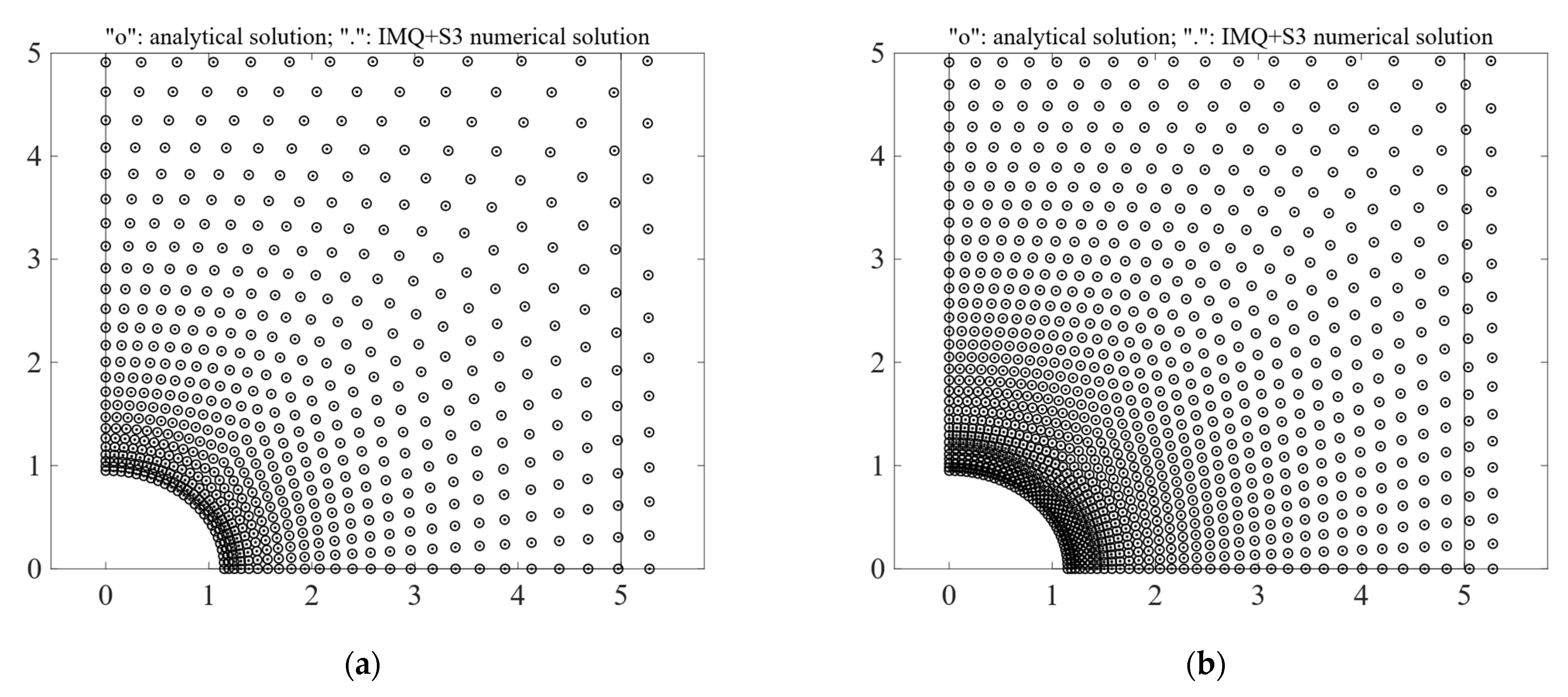
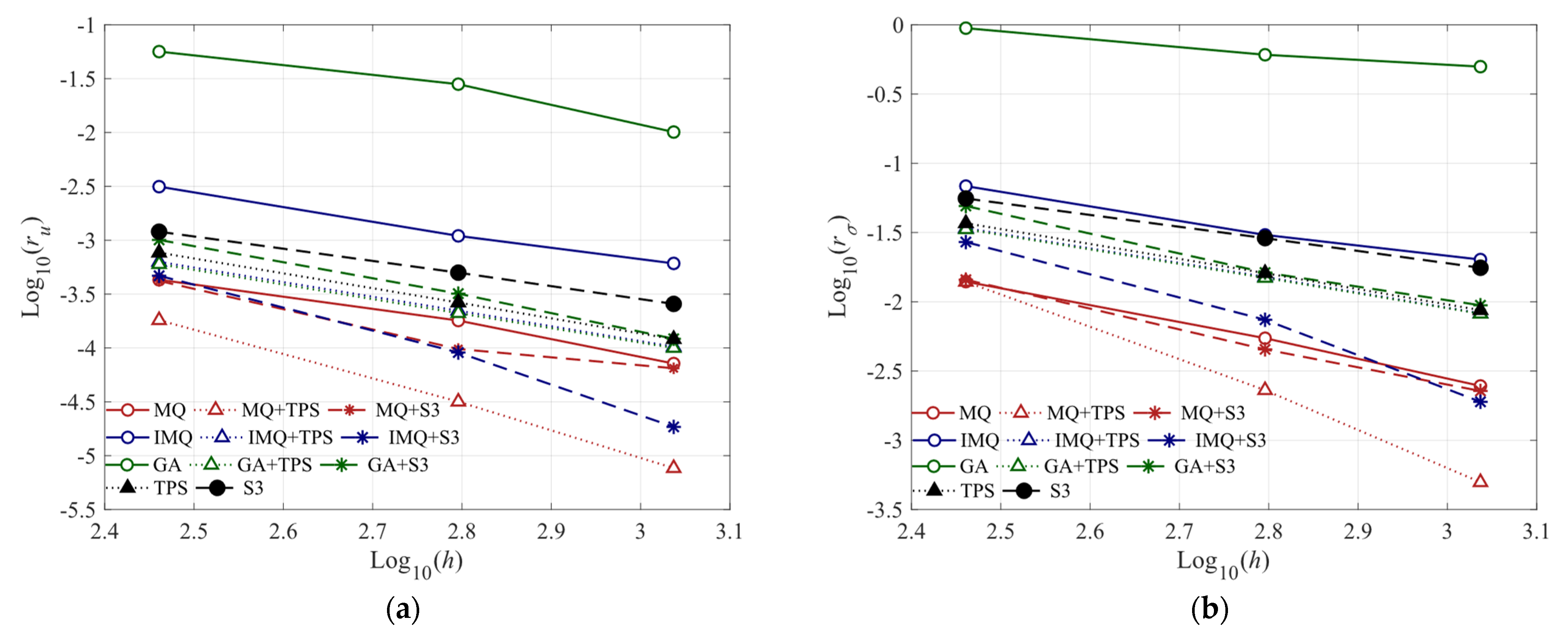
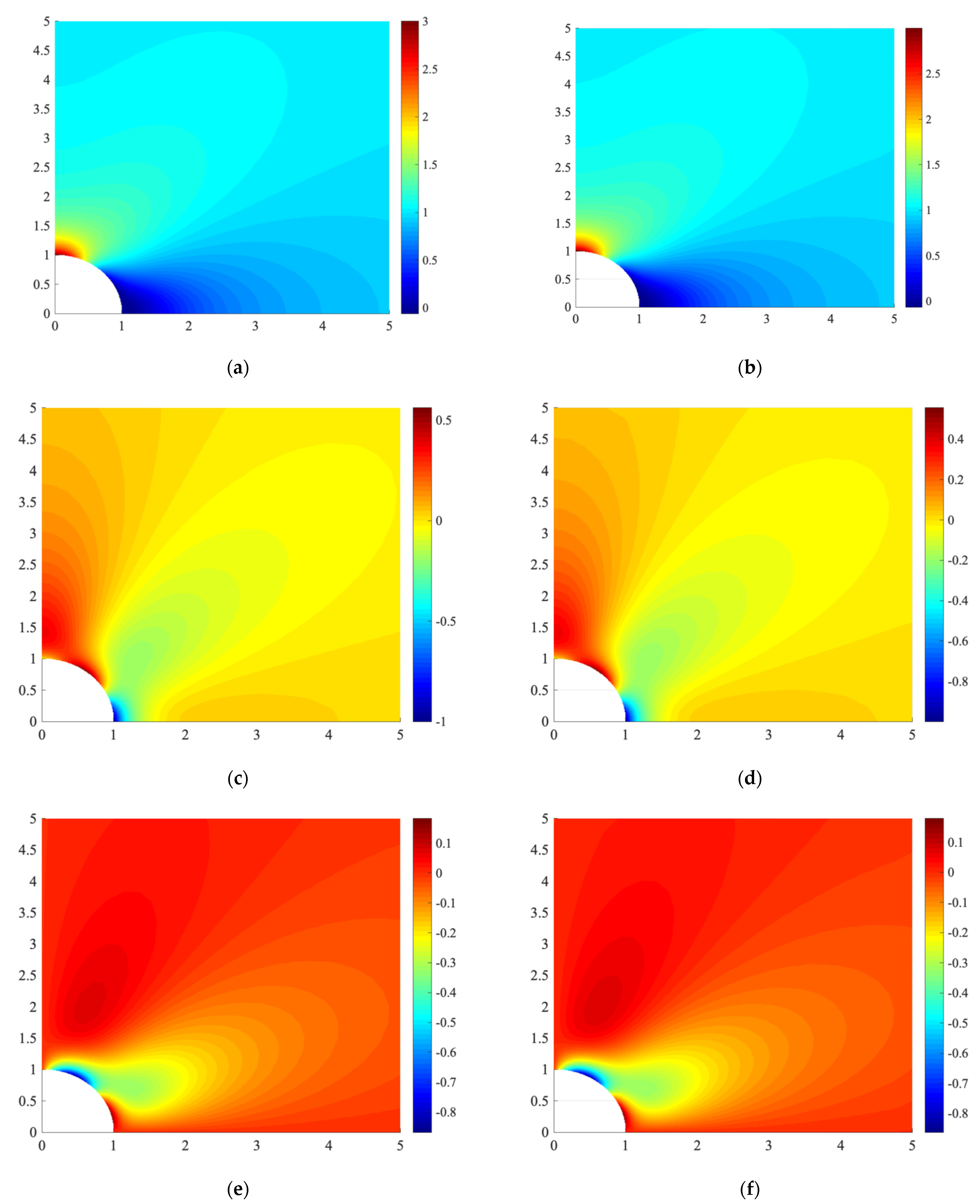
3.3.2. Convergence Analysis and Simulation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hardy, R.L. Multiquadric equations of topography and other irregular surfaces. J. Geophys. Res. 1971, 76, 1905–1915. [Google Scholar] [CrossRef]
- Buhmann, M.D. Radial basis functions. Acta Numer. 2000, 9, 1–38. [Google Scholar] [CrossRef] [Green Version]
- Kansa, E.J. Multiquadrics—A scattered data approximation scheme with applications to computational fluiddynamics—II solutions to parabolic, hyperbolic and elliptic partial differential equations. Comput. Math. Appl. 1990, 19, 147–161. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.B.; Lee, Y.L.; Sunwoo, Y.L.; Yoon, J. Some issues on interpolation matrices of locally scaled radial basis functions. Appl. Math. Comput. 2011, 217, 5011–5014. [Google Scholar] [CrossRef]
- Fasshauer, G.E.; Zhang, J.G. On choosing “optimal” shape parameters for RBF approximation. Numer. Algorithms 2007, 45, 345–368. [Google Scholar] [CrossRef]
- Franke, C.; Schaback, R. Solving partial differential equations by collocation using radial basis functions. Appl. Math. Comput. 1998, 93, 73–82. [Google Scholar] [CrossRef]
- Hardy, R.L. A contribution of the multiquadric method: Interpolation of potential inside the earth. Comput. Math. Appl. 1992, 24, 81–97. [Google Scholar] [CrossRef] [Green Version]
- Rippa, S. An algorithm for selecting a good value for the parameter c in radial basis function interpolation. Adv. Comput. Math. 1999, 11, 193–210. [Google Scholar] [CrossRef]
- Diederichs, B.; Iske, A. Improved estimates for condition numbers of radial basis function interpolation matrices. J. Approx. Theory 2019, 238, 38–51. [Google Scholar] [CrossRef]
- Majdisova, Z.; Skala, V. Radial basis function approximations: Comparison and applications. Appl. Math. Model. 2017, 51, 728–743. [Google Scholar] [CrossRef] [Green Version]
- Kansa, E.J.; Carlson, R. Improved accuracy of multi-quadric interpolation using variable shape parameters. Comput. Math. Appl. 1992, 24, 20–99. [Google Scholar] [CrossRef] [Green Version]
- Scotta, A.S.; Derek, S. A random variable shape parameter strategy for radial basis function approximation methods. Eng. Anal. Bound. Elem. 2009, 33, 1239–1245. [Google Scholar]
- Biazar, J.; Hosami, M. An interval for the shape parameter in radial basis function approximation. Appl. Math. Comput. 2017, 315, 131–149. [Google Scholar] [CrossRef]
- Ahmad, G.; Ehsan, M.; Hamed, R. On the new variable shape parameter strategies for radial basis function. Comput. Appl. Math. 2015, 34, 691–704. [Google Scholar]
- Stolbunov, V.; Nair, P.B. Sparse radial basis function approximation with spatially variable shape parameters. Appl. Math. Comput. 2018, 330, 170–184. [Google Scholar] [CrossRef]
- Bayona, V.; Moscoso, M.; Kindelan, M. Optimal variable shape parameter for multiquadric based RBF-FD method. J. Comput. Phys. 2012, 231, 2466–2481. [Google Scholar] [CrossRef]
- Zhang, Y.M. An accurate and stable RBF method for solving partial differential equations. Appl. Math. Lett. 2019, 97, 93–98. [Google Scholar] [CrossRef]
- Nadir, B.; Mohammed, O.; Minh-Tuan, N.; Abderrezak, S. Optimal trajectory generation method to find a smooth robot joint trajectory based on multiquadric radial basis functions. Int. J. Adv. Manuf. Technol. 2022, 120, 297–312. [Google Scholar] [CrossRef]
- Feng, L.T.; Katupitiya, J. Radial basis function-based vector field algorithm for wildfire boundary tracking with UAVs. Comput. Appl. Math. 2022, 41, 124. [Google Scholar] [CrossRef]
- Swetha, K.; Eldho, T.I.; Singh, L.G.; Kumar, A.V. Groundwater flow simulation in a confined aquifer using local radial point interpolation meshless method (LRPIM). Eng. Anal. Bound. Elem. 2022, 134, 637–649. [Google Scholar] [CrossRef]
- Parand, K.; Hemami, M. Numerical study of astrophysics equations by meshless collocation method based on compactly supported radial basis function. Int. J. APPL. Comput. Math. 2017, 3, 1053–1075. [Google Scholar] [CrossRef] [Green Version]
- Karimi, N.; Kazem, S.; Ahmadian, D.; Adibi, H.; Ballestra, L.V. On a generalized Gaussian radial basis function: Analysis and applications. Eng. Anal. Bound. Elem. 2020, 112, 46–57. [Google Scholar] [CrossRef]
- Chen, Y.T.; Cao, Y. A coupled RBF method for the solution of elastostatic problems. Math. Probl. Eng. 2021, 2121, 6623273. [Google Scholar] [CrossRef]
- Hussain, M. Hybrid radial basis function methods of lines for the numerical solution of viscous Burgers’ equation. J. Comput. Appl. Math. 2021, 40, 107. [Google Scholar] [CrossRef]
- Zhang, X.; Song, K.Z.; Lu, M.W.; Liu, X. Meshless methods based on collocation with radial basis functions. Comput. Mech. 2000, 26, 333–343. [Google Scholar] [CrossRef]
- Wendland, H. Piecewise polynomial positive definite and compactly supported radial basis functions of minimal degree. Adv. Comput. Math. 1995, 4, 389–396. [Google Scholar] [CrossRef]
- Tolstykh, A.I.; Shirobokov, D.A. On using radial basis functions in a “finite difference mode” with applications to elasticity problems. Comput. Mech. 2003, 33, 68–79. [Google Scholar] [CrossRef]
- Liu, G.R.; Gu, Y.T. A local radial point interpolation method (LRPIM) for free vibration analyses of 2-D solids. J. Sound Vib. 2001, 246, 29–46. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.G.; Liu, G.R. A point interpolation meshless method based on radial basis functions. Int. J. Numer. Methods Eng. 2002, 54, 1623–1648. [Google Scholar] [CrossRef]
- Wang, J.G.; Liu, G.R. On the optimal shape parameters of radial basis functions used for 2-D meshless methods. Comput. Methods Appl. Mech. Eng. 2002, 191, 2611–2630. [Google Scholar] [CrossRef]
- Cao, Y.; Yao, L.Q.; Yi, S.C. A weighted nodal-radial point interpolation meshless method for 2D solid problems. Eng. Anal. Bound. Elem. 2014, 39, 88–100. [Google Scholar] [CrossRef]
- Simonenko, S.; Bayona, V.; Kindelan, M. Optimal shape parameter for the solution of elastostatic problems with the RBF method. J. Eng. Math. 2014, 85, 115–129. [Google Scholar] [CrossRef]
- Mishra, P.K.; Nath, S.K.; Kosec, G.; Sen, M.K. An improved radial basis-pseudospectral scheme with hybrid Gaussian-cubic kernels. Eng. Anal. Bound. Elem. 2017, 80, 162–171. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Gao, H.F.; Wei, G.F.; Wang, Z.M. The meshfree analysis of elasticity problem utilizing radial basis reproducing kernel particle method. Results Phys. 2020, 17, 103037. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Zhao, Q.F.; Lim, C.W. A new static-dynamic equivalence beam bending approach for the stability of a vibrating beam. Mech. Adv. Mater. Struct. 2021, 28, 999–1009. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Infinitely Smooth RBFs | Piecewise Smooth RBFs | ||
|---|---|---|---|
| Name | Expression | Name | Expression |
| Multiquadric (MQ) | Splines of degree n (Sn) | ||
| Inverse multiquadric (IMQ) | Thin plate spline (TPS) | ||
| Gaussian (GA) | Linear | ||
| Name | Expression |
|---|---|
| MQ + TPS | |
| IMQ + TPS | |
| GA + TPS | |
| MQ + S3 | |
| IMQ + S3 | |
| GA + S3 |
| Internal Node | Coordinates | Method | |||
|---|---|---|---|---|---|
| Exact | MQ | MQ + TPS | MQ + S3 | ||
| 5 | (1,1) | ||||
| (ux, uy) | (0.600,0.600) | (0.593,0.589) | (0.593,0.589) | (0.593,0.590) | |
| (0.857,0.857,0) | (0.896,0.890,0.010) | (0.896,0.890,0.010) | (0.895,0.889,0.010) | ||
| 10 | (0.65,1) | ||||
| (ux, uy) | (0.390,0.600) | (0.374,0.588) | (0.374,0.588) | (0.374,0.588) | |
| (0.857,0.857,0) | (0.893,0.900,0.009) | (0.893,0.900,0.009) | (0.892,0.899,0.009) | ||
| 11 | (0.7,1.5) | ||||
| (ux, uy) | (0.420,0.900) | (0.409,0.901) | (0.409,0.901) | (0.409,0.901) | |
| (0.857,0.857,0) | (0.906,0.893,−0.006) | (0.906,0.893,−0.006) | (0.904,0.892,−0.006) | ||
| 12 | (1.3,1.2) | ||||
| (ux, uy) | (0.780,0.720) | (0.784,0.718) | (0.784,0.718) | (0.784,0.718) | |
| (0.857,0.857,0) | (0.892,0.896,0.012) | (0.892,0.896,0.012) | (0.891,0.895,0.011) | ||
| 13 | (1.2,0.6) | ||||
| (ux, uy) | (0.720,0.360) | (0.718,0.343) | (0.718,0.343) | (0.718,0.343) | |
| (0.857,0.857,0) | (0.909,0.889,−0.003) | (0.909,0.889,−0.003) | (0.908,0.888,−0.003) | ||
| Method | N = 39 | N = 125 | N = 441 | N = 949 | |
|---|---|---|---|---|---|
| MQ | copt | 20 | 10 | 3 | 1.6 |
| ru | 2.5513 × 10−6 | 7.1523 × 10−7 | 2.5843 × 10−7 | 3.7019 × 10−7 | |
| 1.4577 × 10−3 | 8.6395 × 10−5 | 1.7324 × 10−4 | 3.3451 × 10−4 | ||
| CPU (s) | 0.0445 | 0.0451 | 0.2092 | 0.7934 | |
| IMQ | copt | 18 | 9 | 3 | 1.7 |
| ru | 2.6001 × 10−6 | 9.4806 × 10−7 | 9.5554 × 10−7 | 2.6342 × 10−6 | |
| 1.9224 × 10−3 | 6.2694 × 10−4 | 6.7735 × 10−4 | 2.4746 × 10−3 | ||
| CPU (s) | 0.0270 | 0.0381 | 0.2288 | 0.9858 | |
| GA | copt | 14.5 | 6.5 | 9 | 4.5 |
| ru | 2.7955 × 10−6 | 4.1935 × 10−7 | 5.3383 × 10−6 | 3.8875 × 10−6 | |
| 1.2317 × 10−3 | 5.5071 × 10−5 | 2.3780 × 10−4 | 1.9450 × 10−4 | ||
| CPU (s) | 0.0071 | 0.0269 | 0.1128 | 0.4085 | |
| MQ + TPS | copt | (19.5,10−15) | (14,10−13) | (12.5,10−11) | (11.5,10−10) |
| ru | 3.3220 × 10−6 | 2.2796 × 10−7 | 2.1210 × 10−8 | 1.3474 × 10−8 | |
| 2.8319 × 10−3 | 7.7843 × 10−5 | 9.3717 × 10−6 | 8.6273 × 10−6 | ||
| CPU (s) | 0.0114 | 0.0723 | 0.2271 | 1.0846 | |
| IMQ + TPS | copt | (19,10−15) | (13,10−15) | (16,10−13) | (11.5,10−12) |
| ru | 2.2627 × 10−6 | 3.4743 × 10−7 | 4.7540 × 10−8 | 2.9863 × 10−8 | |
| 1.6277 × 10−3 | 1.6833 × 10−4 | 2.8371 × 10−5 | 2.0773 × 10−5 | ||
| CPU (s) | 0.0108 | 0.0396 | 0.2762 | 1.3265 | |
| GA + TPS | copt | (19.5,10−15) | (9.5,10−14) | (10,10−12) | (9,10−11) |
| ru | 2.7870 × 10−6 | 1.7480 × 10−7 | 3.5633 × 10−8 | 2.7927 × 10−8 | |
| 1.5181 × 10−3 | 8.5198 × 10−5 | 2.1890 × 10−5 | 2.1679 × 10−5 | ||
| CPU (s) | 0.0093 | 0.0686 | 0.2068 | 0.9901 | |
| MQ + S3 | copt | (20,10−12) | (13,10−15) | (10,10−11) | (4.5,10−10) |
| ru | 5.1602 × 10−6 | 3.3904 × 10−7 | 4.5543 × 10−8 | 5.0247 × 10−8 | |
| 2.8665 × 10−3 | 3.0302 × 10−5 | 2.1685 × 10−5 | 2.5899 × 10−5 | ||
| CPU (s) | 0.0198 | 0.0585 | 0.1982 | 0.8878 | |
| IMQ + S3 | copt | (20,10−15) | (13,10−15) | (14,10−13) | (15.5,10−13) |
| ru | 2.6737 × 10−6 | 1.3149 × 10−7 | 1.9911 × 10−8 | 1.1097 × 10−8 | |
| 1.7319 × 10−3 | 5.7103 × 10−5 | 1.0639 × 10−5 | 5.6919 × 10−6 | ||
| CPU (s) | 0.0127 | 0.0654 | 0.2489 | 1.1624 | |
| GA + S3 | copt | (20,10−12) | (11,10−14) | (10.5,10−12) | (9,10−11) |
| ru | 3.0658 × 10−6 | 1.1867 × 10−7 | 1.3768 × 10−8 | 1.3672 × 10−8 | |
| 2.9404 × 10−3 | 3.4692 × 10−5 | 9.9027 × 10−6 | 1.0190 × 10−5 | ||
| CPU (s) | 0.0118 | 0.0573 | 0.1818 | 0.7992 | |
| TPS | ru | 2.0007 × 10−4 | 7.5755 × 10−5 | 1.6952 × 10−5 | 8.0060 × 10−6 |
| 1.3620 × 10−1 | 2.7900 × 10−2 | 6.6000 × 10−3 | 2.9000 × 10−3 | ||
| CPU (s) | 0.0051 | 0.0297 | 0.1314 | 0.5920 | |
| S3 | ru | 3.3979 × 10−4 | 1.8154 × 10−4 | 5.0393 × 10−5 | 2.7450 × 10−5 |
| 2.0560 × 10−1 | 8.5200 × 10−2 | 3.0800 × 10−2 | 1.7500 × 10−2 | ||
| CPU (s) | 0.0279 | 0.0224 | 0.0978 | 0.4239 |
| Method | N =39 (3 × 13) | N =125 (5 × 25) | N =441 (9 × 49) | N =949 (13 × 73) | |
|---|---|---|---|---|---|
| MQ | copt | 18 | 14 | 3.5 | 1.7 |
| ru | 8.0866 × 10−6 | 2.9725 × 10−6 | 4.0491 × 10−7 | 5.3096 × 10−7 | |
| 8.3123 × 10−2 | 6.4158 × 10−4 | 1.2788 × 10−4 | 3.8119 × 10−4 | ||
| CPU (s) | 0.0338 | 0.0437 | 0.1869 | 0.7948 | |
| IMQ | copt | 18.5 | 16.5 | 3.5 | 2.1 |
| ru | 1.2985 × 10−5 | 2.1955 × 10−6 | 1.4602 × 10−6 | 1.1814 × 10−6 | |
| 8.0496 × 10−2 | 6.9578 × 10−4 | 6.7189 × 10−4 | 7.5492 × 10−4 | ||
| CPU (s) | 0.0852 | 0.0390 | 0.2182 | 0.9871 | |
| GA | copt | 18 | 13 | 4 | 6 |
| ru | 7.3142 × 10−6 | 2.5473 × 10−6 | 3.7281 × 10−6 | 5.8424 × 10−6 | |
| 6.1412 × 10−2 | 3.6249 × 10−4 | 2.1470 × 10−4 | 2.2683 × 10−4 | ||
| CPU (s) | 0.0073 | 0.0237 | 0.2114 | 0.4151 | |
| MQ + TPS | copt | (20,10−15) | (20,10−10) | (11,10−11) | (10.5,10−10) |
| ru | 7.1497 × 10−6 | 7.4186 × 10−7 | 1.4188 × 10−8 | 9.3300 × 10−9 | |
| 8.5075 × 10−2 | 2.9660 × 10−4 | 8.1700 × 10−6 | 6.4800 × 10−6 | ||
| CPU (s) | 0.0467 | 0.0572 | 0.2321 | 1.0553 | |
| IMQ + TPS | copt | (20,10−15) | (20,10−14) | (11.5,10−13) | (10.5,10−12) |
| ru | 1.2108 × 10−5 | 1.2125 × 10−6 | 2.9799 × 10−8 | 1.5791 × 10−8 | |
| 7.6433 × 10−2 | 4.5468 × 10−4 | 2.1833 × 10−5 | 1.5639 × 10−5 | ||
| CPU (s) | 0.0444 | 0.0696 | 0.2802 | 1.3881 | |
| GA + TPS | copt | (20,10−10) | (20,10−13) | (10,10−12) | (9,10−11) |
| ru | 3.4546 × 10−6 | 3.7997 × 10−7 | 2.6746 × 10−8 | 2.0292 × 10−8 | |
| 5.8012 × 10−2 | 1.5217 × 10−4 | 1.9862 × 10−5 | 1.6821 × 10−5 | ||
| CPU (s) | 0.0069 | 0.0319 | 0.2191 | 0.9833 | |
| MQ + S3 | copt | (1910−12) | (20,10−12) | (11,10−11) | (9,10−10) |
| ru | 5.3438 × 10−6 | 7.6381 × 10−7 | 3.1988 × 10−8 | 2.9318 × 10−8 | |
| 7.5212 × 10−2 | 2.7886 × 10−4 | 1.8097 × 10−5 | 3.0168 × 10−5 | ||
| CPU (s) | 0.0398 | 0.0329 | 0.2059 | 0.8991 | |
| IMQ + S3 | copt | (20,10−15) | (20,10−13) | (14.5,10−13) | (16,10−13) |
| ru | 1.3095 × 10−5 | 1.1944 × 10−6 | 1.2919 × 10−8 | 6.9444 × 10−9 | |
| 7.7167 × 10−2 | 4.3883 × 10−4 | 8.8861 × 10−6 | 4.4397 × 10−6 | ||
| CPU (s) | 0.0309 | 0.0372 | 0.2585 | 1.1514 | |
| GA + S3 | copt | (20,10−12) | (20,10−13) | (11,10−12) | (9.5,10−11) |
| ru | 4.5154 × 10−6 | 3.4575 × 10−7 | 1.2244 × 10−8 | 9.7053 × 10−9 | |
| 5.8101 × 10−2 | 1.2654 × 10−4 | 8.6607 × 10−6 | 8.6815 × 10−6 | ||
| CPU (s) | 0.0053 | 0.0297 | 0.1934 | 0.7901 | |
| TPS | ru | 1.7521 × 10−4 | 6.2527 × 10−5 | 1.0582 × 10−5 | 3.4544 × 10−6 |
| 1.3640 × 10−1 | 2.7100 × 10−2 | 6.0000 × 10−3 | 2.4000 × 10−3 | ||
| CPU (s) | 0.0042 | 0.0290 | 0.1349 | 0.5985 | |
| S3 | ru | 3.3830 × 10−4 | 1.7256 × 10−4 | 4.1090 × 10−5 | 1.6038 × 10−5 |
| 2.0250 × 10−1 | 1.3640 × 10−1 | 2.7400 × 10−2 | 1.3900 × 10−2 | ||
| CPU (s) | 0.0034 | 0.0271 | 0.1025 | 0.4247 |
| Method | N = 289 | N = 625 | N = 1089 | |
|---|---|---|---|---|
| MQ | copt | 0.9 | 0.8 | 0.8 |
| ru | 4.2960 × 10−4 | 1.7965 × 10−4 | 7.1667 × 10−5 | |
| 1.3975 × 10−2 | 5.4578 × 10−3 | 2.4684 × 10−3 | ||
| CPU (s) | 0.1746 | 0.3531 | 1.1068 | |
| IMQ | copt | 1.3 | 1.2 | 1.2 |
| ru | 3.1431 × 10−3 | 1.0973 × 10−3 | 6.0918 × 10−4 | |
| 6.8418 × 10−2 | 3.0396 × 10−2 | 2.0173 × 10−2 | ||
| CPU (s) | 0.1658 | 0.2070 | 1.3669 | |
| GA | copt | 1.8 | 2 | 2.1 |
| ru | 5.6372 × 10−2 | 2.8088 × 10−2 | 1.0097 × 10−2 | |
| 9.4539 × 10−1 | 6.0751 × 10−1 | 4.9868 × 10−1 | ||
| CPU (s) | 0.0599 | 0.1048 | 0.5760 | |
| MQ + TPS | copt | (1.7,10−5) | (1.6,10−7) | (1.4,10−8) |
| ru | 1.8100 × 10−4 | 3.1703 × 10−5 | 7.6593 × 10−6 | |
| 1.3936 × 10−2 | 2.2995 × 10−3 | 4.9781 × 10−4 | ||
| CPU (s) | 0.1535 | 0.4709 | 1.5308 | |
| IMQ + TPS | copt | (20,10−7) | (20,10−7) | (20,10−7) |
| ru | 6.2954 × 10−4 | 2.2173 × 10−4 | 1.0269 × 10−4 | |
| 3.4004 × 10−2 | 1.5125 × 10−2 | 8.2553 × 10−3 | ||
| CPU (s) | 0.1371 | 0.5829 | 1.8389 | |
| GA + TPS | copt | (0.01,10−9) | (0.01,10−9) | (0.01,10−7) |
| ru | 5.9965 × 10−4 | 2.1045 × 10−4 | 9.9975 × 10−5 | |
| 3.3397 × 10−2 | 1.4878 × 10−2 | 8.1967 × 10−3 | ||
| CPU (s) | 0.0975 | 0.4265 | 1.3619 | |
| MQ + S3 | copt | (0.9,10−8) | (0.9,10−12) | (0.8,10−9) |
| ru | 4.1938 × 10−4 | 9.7755 × 10−5 | 6.4772 × 10−5 | |
| 1.4432 × 10−2 | 4.5325 × 10−3 | 2.2693 × 10−3 | ||
| CPU (s) | 0.1264 | 0.4127 | 1.2019 | |
| IMQ + S3 | copt | (2.5,10−6) | (2.5,10−8) | (2.2,10−9) |
| ru | 4.6816 × 10−4 | 9.0696 × 10−5 | 1.8502 × 10−5 | |
| 2.6994 × 10−2 | 7.4137 × 10−3 | 1.8960 × 10−3 | ||
| CPU (s) | 0.1495 | 0.5371 | 1.6242 | |
| GA+S3 | copt | (0.4,10−5) | (0.8,10−5) | (0.8,10−5) |
| ru | 1.0062 × 10−3 | 3.1934 × 10−4 | 1.2175 × 10−4 | |
| 4.9156 × 10−2 | 1.6263 × 10−2 | 9.4336 × 10−3 | ||
| CPU (s) | 0.1173 | 0.3705 | 1.1097 | |
| TPS | ru | 7.6646 × 10−4 | 2.6404 × 10−4 | 1.2074 × 10−4 |
| 3.6900 × 10−2 | 1.6100 × 10−2 | 8.7000 × 10−3 | ||
| CPU (s) | 0.1215 | 0.2706 | 0.7952 | |
| S3 | ru | 1.2000 × 10−3 | 4.9997 × 10−4 | 2.5632 × 10−4 |
| 5.5700 × 10−2 | 2.8800 × 10−2 | 1.7600 × 10−2 | ||
| CPU (s) | 0.1209 | 0.2032 | 0.5977 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.-T.; Li, C.; Yao, L.-Q.; Cao, Y. A Hybrid RBF Collocation Method and Its Application in the Elastostatic Symmetric Problems. Symmetry 2022, 14, 1476. https://doi.org/10.3390/sym14071476
Chen Y-T, Li C, Yao L-Q, Cao Y. A Hybrid RBF Collocation Method and Its Application in the Elastostatic Symmetric Problems. Symmetry. 2022; 14(7):1476. https://doi.org/10.3390/sym14071476
Chicago/Turabian StyleChen, Ying-Ting, Cheng Li, Lin-Quan Yao, and Yang Cao. 2022. "A Hybrid RBF Collocation Method and Its Application in the Elastostatic Symmetric Problems" Symmetry 14, no. 7: 1476. https://doi.org/10.3390/sym14071476