
3D Localization Method of Partial Discharge in Air-Insulated Substation Based on Improved Particle Swarm Optimization Algorithm

Abstract
:1. Introduction
2. PD Localization Principle and Error Analysis
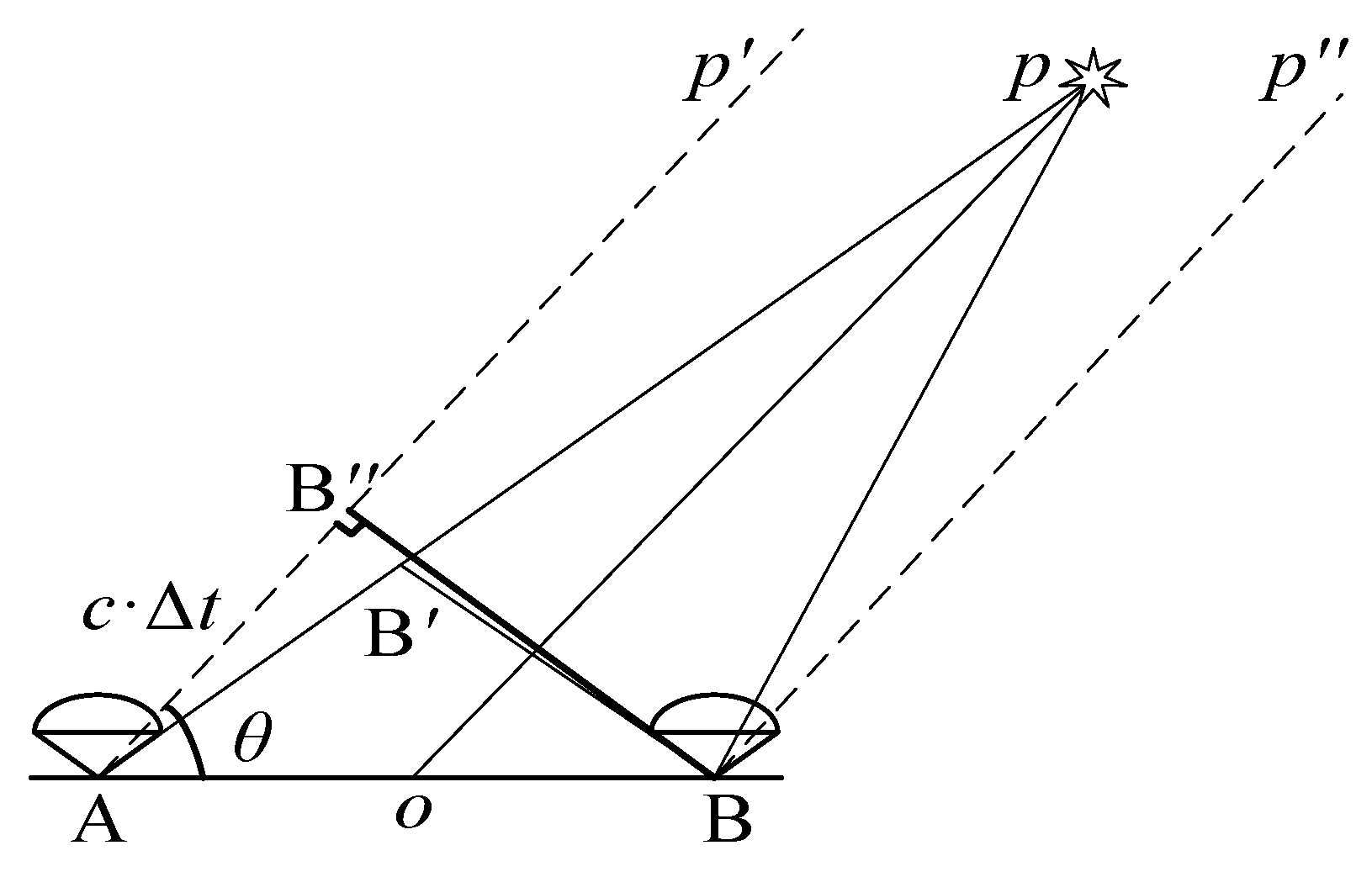
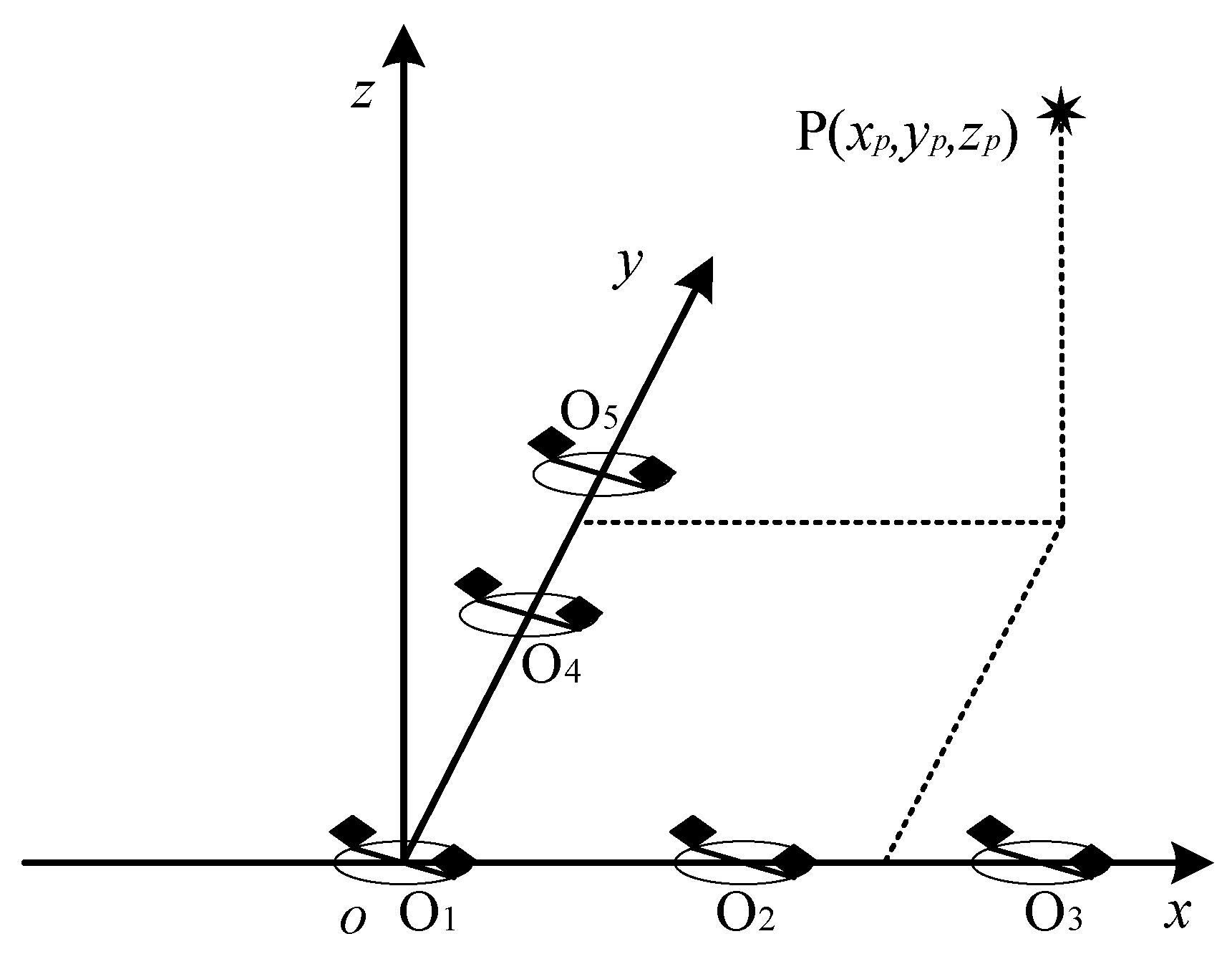
2.1. The Principle of PD Localization Based on a Symmetrical Antenna Array
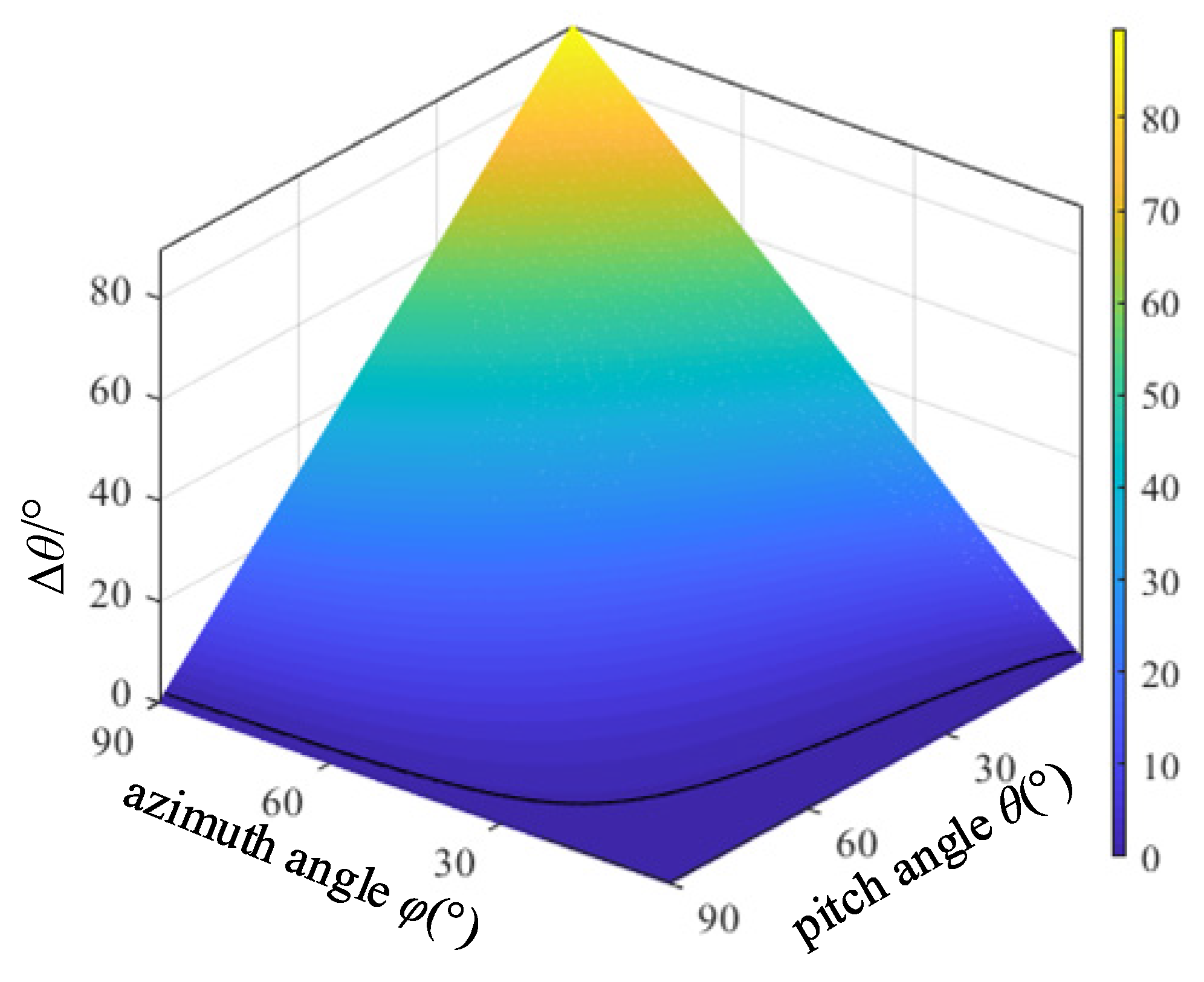
2.2. Localization Error Analysis
3. An Improved PSO Algorithm-Based 3D Localization
4. Experimental Verification
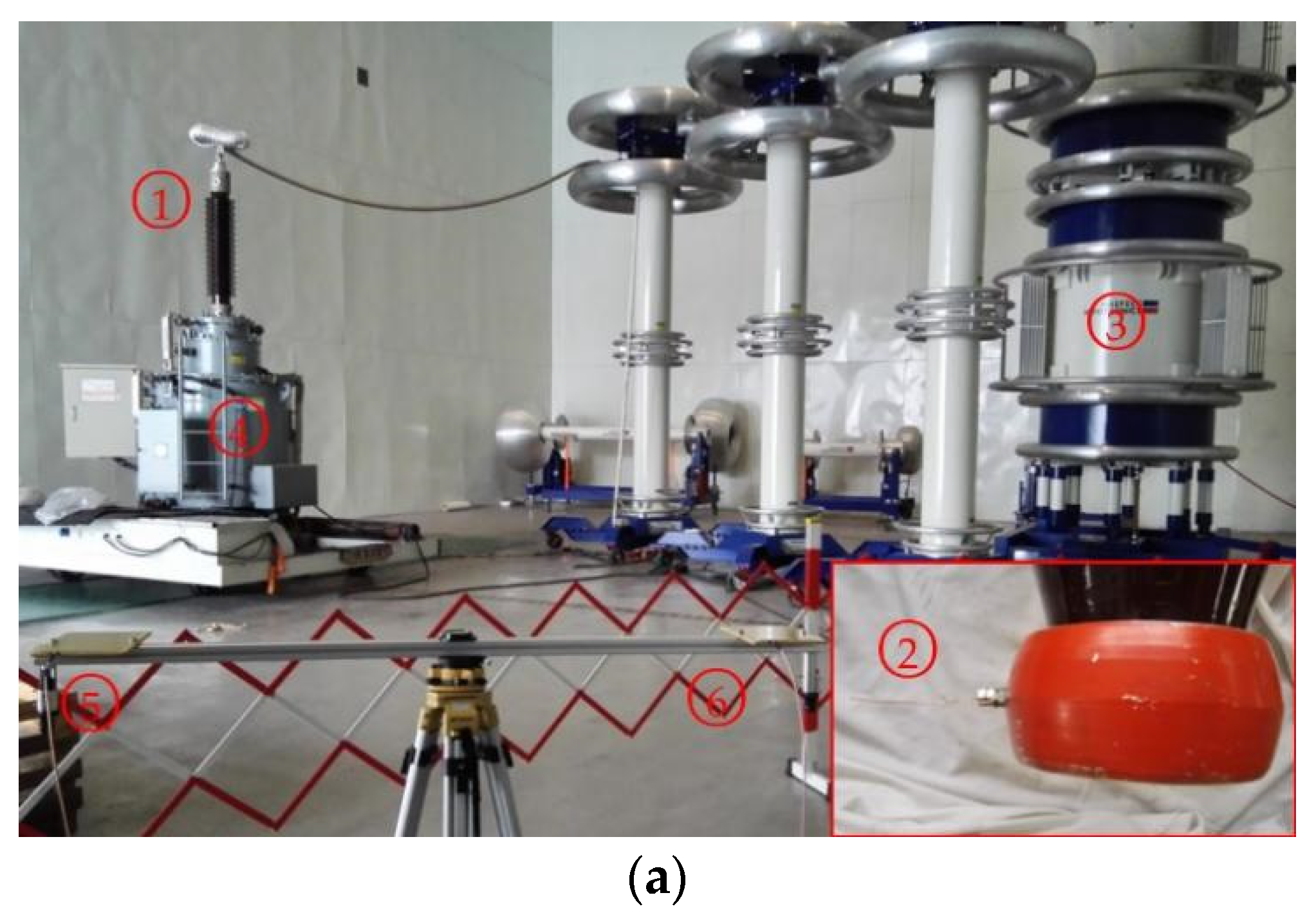
4.1. Experiment
4.2. Testing Results
4.3. Data Analysis
4.3.1. Position Analysis
4.3.2. Analysis of Factors
4.3.3. Comparison Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abdel-Gawad, N.M.; El Dein, A.Z.; Mansour DE, A.; Ahmed, H.M.; Darwish, M.M.; Lehtonen, M. PVC nanocomposites for cable insulation with enhanced dielectric properties, partial discharge resistance and mechanical performance. High Volt. 2020, 5, 463–471. [Google Scholar] [CrossRef]
- Abdel-Gawad, N.M.; El Dein, A.Z.; Mansour DE, A.; Ahmed, H.M.; Darwish MM, F.; Lehtonen, M. Experimental measurements of partial discharge activity within LDPE/TiO2 nanocomposites. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 811–816. [Google Scholar]
- Abdel-Gawad, N.M.; Mansour DE, A.; Darwish MM, F.; El Dein, A.Z.; Ahmed, H.M.; Lehtonen, M. Impact of nanoparticles functionalization on partial discharge activity within PVC/SiO2 nanocomposites. In Proceedings of the 2018 IEEE 2nd International Conference on Dielectrics (ICD), Budapest, Hungary, 1–5 July 2018; pp. 1–4. [Google Scholar]
- Cheng, J.; Xu, Y.; Ding, D.; Liu, W. Investigation of the UHF Partial Discharge Detection Characteristics of a Novel Bushing Tap Sensor for Transformers. IEEE Trans. Power Deliv. 2020, 36, 2748–2757. [Google Scholar] [CrossRef]
- Zhou, L.; Cai, J.; Hu, J.; Lang, G.; Guo, L.; Wei, L. A Correction-iteration Method for Partial Discharge Localization in Transformer based on Acoustic Measurement. IEEE Trans. Power Deliv. 2020, 36, 1571–1581. [Google Scholar] [CrossRef]
- Zhang, X.; Shi, M.; He, C.; Li, J. On Site Oscillating Lightning Impulse Test and Insulation Diagnose for Power Transformers. IEEE Trans. Power Deliv. 2020, 35, 2548–2550. [Google Scholar] [CrossRef]
- Ning, S.; He, Y.; Yuan, L.; Sui, Y.; Huang, Y.; Cheng, T. A Novel Localization Method of Partial Discharge Sources in Substations Based on UHF Antenna and TSVD Regularization. IEEE Sens. J. 2021, 21, 17040–17052. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Liu, Q.; Zhang, J.; Deng, J.; Zhang, G.; Shao, X.; He, W. Localization of multiple partial discharge sources in air-insulated substation using probability-based algorithm. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 157–166. [Google Scholar] [CrossRef]
- Li, Z.; Luo, L.; Zhou, N.; Sheng, G.; Jiang, X. A Novel Partial Discharge Localization Method in Substation Based on a Wireless UHF Sensor Array. Sensors 2017, 17, 1909. [Google Scholar] [CrossRef]
- Dhara, S.; Koley, C.; Chakravorti, S. A UHF Sensor Based Partial Discharge Monitoring System for Air Insulated Electrical Substations. IEEE Trans. Power Deliv. 2020, 36, 3649–3656. [Google Scholar] [CrossRef]
- Hou, H.; Sheng, G.; Jiang, X. Robust Time Delay Estimation Method for Locating UHF Signals of Partial Discharge in Substation. IEEE Trans. Power Deliv. 2013, 28, 1960–1968. [Google Scholar]
- Sinaga, H.H.; Phung, B.T.; Blackburn, T.R. Partial discharge localization in transformers using UHF detection method. IEEE Trans. Dielectr. Electr. Insul. 2012, 19, 1891–1990. [Google Scholar] [CrossRef]
- Judd, M.D.; Farish, O.; Hampton, B.F. The excitation of UHF signals by partial discharges in GIS. IEEE Trans. Dielectr. Electr. Insul. 1996, 3, 213–228. [Google Scholar] [CrossRef]
- Portugues, I.E.; Moore, P.J.; Glover, I.A.; Johnstone, C.; McKosky, R.H.; Goff, M.B.; van der Zel, L. RF-Based Partial Discharge Early Warning System for Air-Insulated Substations. IEEE Trans. Power Deliv. 2009, 24, 20–29. [Google Scholar] [CrossRef]
- He, J.; Li, M.; Chen, G.; Wang, Z. Error analysis and antenna array placement optimization of localization system for partial discharge in substation. Prz. Elektrotechniczny 2014, 90, 104–107. [Google Scholar]
- Wenjun, Z.; Pengfei, L.; Shuai, Y.; Yushun, L.; Yan, T.; Yong, W. Partial Discharge Localization Method by Multi-direction Measurement Using Directional Antenna in Substation. Gaodianya Jishu/High Volt. Eng. 2017, 43, 1476–1484. [Google Scholar]
- Xavier, G.V.; de Oliveira, A.C.; Silva, A.D.; Nobrega, L.A.; da Costa, E.G.; Serres, A.J. Application of Time Difference of Arrival Methods in the Localization of Partial Discharge Sources Detected Using Bio-Inspired UHF Sensors. IEEE Sens. J. 2020, 21, 1947–1956. [Google Scholar] [CrossRef]
- Wang, S.; He, Y.; Yin, B.; Ning, S.; Zeng, W. Partial Discharge Localization in Substations Using a Regularization Method. IEEE Trans. Power Deliv. 2020, 6, 822–830. [Google Scholar] [CrossRef]
- Zhu, M.X.; Wang, Y.B.; Liu, Q.; Zhang, J.N.; Deng, J.B.; Zhang, G.J.; Shao, X.J.; He, W.L. Localization of Partial Discharge Signals Based on Ultra-high-frequency Antenna Array and Analysis of Influence Factors. High Volt. Appar. 2019, 55, 53–60. [Google Scholar]
- Khan, U.F.; Lazaridis, P.I.; Mohamed, H.; Albarracín, R.; Zaharis, Z.D.; Atkinson, R.C.; Tachtatzis, C.; Glover, I.A. An Efficient Algorithm for Partial Discharge Localization in High-Voltage Systems Using Received Signal Strength. Sensors 2018, 18, 4000. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Q.; Luo, L.; Song, H.; Sheng, G.; Jiang, X. Fault Early Warning in Air-insulated Substations by RSSI-Based Angle of Arrival Estimation and Monopole UHF Wireless Sensor Array. IET Gener. Transm. Distrib. 2020, 14, 2345–2361. [Google Scholar]
- Zheng, Q.; Luo, L.; Song, H.; Sheng, G.; Jiang, X. A RSSI-AOA Based UHF Partial Discharge Localization Method Using MUSIC Algorithm. IEEE Trans. Instrum. Meas. 2021, 70, 1–9. [Google Scholar] [CrossRef]
- Wei, B.; Yu, G.F.; Liu, F.; Sun, H.J.; Li, H.J. Research on Location Method of PD Signal for Metal-Clad Switchgear. Appl. Mech. Mater. 2017, 864, 231–236. [Google Scholar] [CrossRef]
- Hou, H.; Sheng, G.H.; Miao, P.Q.; Li, X.W.; Hu, Y.; Jiang, X.C. Partial Discharge Location Based on Radio Frequency Antenna Array in Substation. High Volt. Eng. 2012, 38, 1334–1340. [Google Scholar]
- Wang, S.; He, Y.; Yin, B.; Zeng, W.; Li, C.; Ning, S. Multi-Resolution Generalized S-Transform Denoising for Precise Localization of Partial Discharge in Substations. IEEE Sens. J. 2020, 21, 4966–4980. [Google Scholar] [CrossRef]
- Li, P.; Zhou, W.; Yang, S.; Liu, Y.; Tian, Y.; Wang, Y. A Novel Method for Partial Discharge Localization in Air-insulated Substations. IET Sci. Meas. Technol. 2017, 11, 331–338. [Google Scholar] [CrossRef]
- Hou, H.; Sheng, G.; Jiang, X. Localization Algorithm for the PD Source in Substation Based on L-Shaped Antenna Array Signal Processing. IEEE Trans. Power Deliv. 2015, 30, 472–479. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, W.; Yang, S.; Li, W.; Li, P.; Yang, S. A Novel Miniaturized Vivaldi Antenna Using Tapered Slot Edge with Resonant Cavity Structure for Ultra-wide Band Applications. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1881–1884. [Google Scholar] [CrossRef]
- Li, P.; Dai, K.; Zhang, T.; Jin, Y.; Liu, Y.; Liao, Y. An accurate and efficient time delay estimation method of ultra-high frequency signals for partial discharge localization in substations. Sensors 2018, 18, 3439. [Google Scholar] [CrossRef] [Green Version]
- Zheng, S.; Li, C.; He, M. A Novel Method of Newton Iteration in Complex Field and Lattice Search for Locating Partial Discharges in Transformers. Proc. CSEE 2013, 33, 155–161. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Testing Point (m) | Rotation Angle (°) | Time Delay (ns) |
|---|---|---|
| O1 (0, 0, 0) | 310 | −0.050 |
| 260 | 3.500 | |
| 280 | 2.375 | |
| 320 | −0.825 | |
| 335 | −1.900 | |
| 0 | −3.550 | |
| O2 (4.2, 0, 0) | 0 | −1.650 |
| 20 | −2.975 | |
| 338 | 0.025 | |
| 324 | 1.050 | |
| 307 | 2.250 | |
| 283 | 3.500 | |
| O3 (8, 0, 0) | 0 | 1.175 |
| 15 | −0.025 | |
| 28 | −0.900 | |
| 60 | −3.100 | |
| 351 | 1.700 | |
| 318 | 3.650 | |
| O4 (0, 3, 0) | 0 | −4.200 |
| 291 | 0.025 | |
| 340 | −3.400 | |
| 300 | −0.650 | |
| 278 | 1.050 | |
| 242 | 3.300 | |
| O5 (0, 6, 0) | 266 | 0.000 |
| 325 | −3.75 | |
| 289 | −1.700 | |
| 275 | −0.750 | |
| 260 | 0.450 | |
| 240 | 1.950 |
| ε | The Number of Selected ak | Localization Results (m) | Error Analysis | ||
|---|---|---|---|---|---|
| Whether the Plane Coordinates Are in Range | Height Error (m) | Absolute Error (Distance from Center Position) (m) | |||
| 0.3 | 5 | 6.37, 5.04, 3.22 | N | 0.25 | 0.54 |
| 0.7 | 7 | 6.39, 5.08, 3.16 | N | 0.31 | 0.53 |
| 1 | 10 | 6.4, 5.37, 3.31 | Y | 0.16 | 0.23 |
| 1.3 | 13 | 6.38, 5.41, 3.33 | Y | 0.14 | 0.21 |
| 1.7 | 14 | 6.36, 5.33, 3.29 | Y | 0.18 | 0.28 |
| 2 | 18 | 6.44, 5.28, 3.11 | N | 0.36 | 0.42 |
| 2.3 | 19 | 6.42, 5.19, 3.04 | N | 0.43 | 0.53 |
| Localization Methods | Name of Methods | Principle Description | Key Parameters |
|---|---|---|---|
| Method A | Direct Particle Swarm Solution Algorithm | Similarly to step 4 and step 5 in the algorithm described in the Section 3, the dimension of the particle is set to 3, and the objective function is the same as Equation (7), where ak and bk are all set to 1. | The number of iterations and the number of particles |
| Method B | Spatial grid search algorithm | The three-dimensional space is meshed, the grid node coordinates are brought into the equation system, and the node corresponding to the minimum deviation value is used as the position of the PD source. | grid size |
| Method C | Iterative grid search solution algorithm | First, the Newton iterative algorithm is used to solve the equation system. Secondly, the grid search algorithm is used to search around the solution result of the iterative method. Next, the node corresponding to the minimum deviation value is used as the position of the PD source. | Number of iterations; Grid size; Search range |
| Method D | Error Probability Distribution- localization algorithm | Based on the equations of each detection point, a system of equations is established. The particle swarm algorithm is used to calculate the azimuth and elevation angles of the PD source, to calculate the error law, to calculate the error probability of each point in the space, and to calculate the error probability of the azimuth and elevation angles of all detection points. The coordinate corresponding to the minimum value of the superimposed value is used as the position of the PD source. | The number of iterations and the number of particles |
| Localization Methods | Settings of Key Parameters | Localization Results and Errors | Time (s) | |
|---|---|---|---|---|
| Results (m) | Absolute Error (m) | |||
| Method A | number of iterations 2000, number of particles 500, calculate four times | (0.03, 0.01, 0.01) | 9.16 | 22.33 |
| (5.67, 5.47, 2.74) | 1.11 | 21.59 | ||
| (6.29, 5.11, 3.64) | 0.47 | 23.35 | ||
| (5.84, 4.88, 3.03) | 1.01 | 22.78 | ||
| Method B | grid size 0.5 m, search range 30 m × 30 m × 20 m | (6.5, 5, 0.5) | 3.02 | 22.05 |
| grid size 0.25 m, search range 30 m × 30 m × 20 m | (6.5, 5.25, 0.25) | 3.23 | 4399.88 | |
| Method C | number of iterations 2000, search objective ± 0.5 m | (6.41, 5.01, 1.25) | 2.28 | 824.36 |
| Method D | number of iterations 2000, number of particles 500 | (6.44, 5.42, 3.32) | 0.18 | 682.18 |
| Proposed method | number of iterations 2000, number of particles 500 | (6.38, 5.41, 3.33) | 0.21 | 42.29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Peng, X.; Yin, K.; Xue, Y.; Wang, R.; Ma, Z. 3D Localization Method of Partial Discharge in Air-Insulated Substation Based on Improved Particle Swarm Optimization Algorithm. Symmetry 2022, 14, 1241. https://doi.org/10.3390/sym14061241
Li P, Peng X, Yin K, Xue Y, Wang R, Ma Z. 3D Localization Method of Partial Discharge in Air-Insulated Substation Based on Improved Particle Swarm Optimization Algorithm. Symmetry. 2022; 14(6):1241. https://doi.org/10.3390/sym14061241
Chicago/Turabian StyleLi, Pengfei, Xinjie Peng, Kaiyang Yin, Yaxu Xue, Rongqing Wang, and Zhengsen Ma. 2022. "3D Localization Method of Partial Discharge in Air-Insulated Substation Based on Improved Particle Swarm Optimization Algorithm" Symmetry 14, no. 6: 1241. https://doi.org/10.3390/sym14061241